Embed Size (px)
DESCRIPTION
Integrated Project Co-operative Systems for Road Safety “Smart Vehicles on Smart Roads” Fabio Tango Centro Ricerche FIAT (Italy), [email protected] SP1 SAFEPROBE. SAFESPOT. SAFESPOT – SP1. SAFEPROBE In-Vehicle Sensing and Platform WP1.3 Specification - PowerPoint PPT Presentation
Citation preview

1SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
Integrated ProjectIntegrated Project
Co-operative Systems for Road Safety Co-operative Systems for Road Safety
““Smart Vehicles on Smart Roads”Smart Vehicles on Smart Roads”
Fabio Tango
Centro Ricerche FIAT (Italy), [email protected]
SP1 SAFEPROBE
SAFESPOTSAFESPOTSAFESPOTSAFESPOT
2SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1
SAFEPROBE
In-Vehicle Sensing and Platform
WP1.3 Specification
Task 1.3.1 Internal Data Fusion Specification
3SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
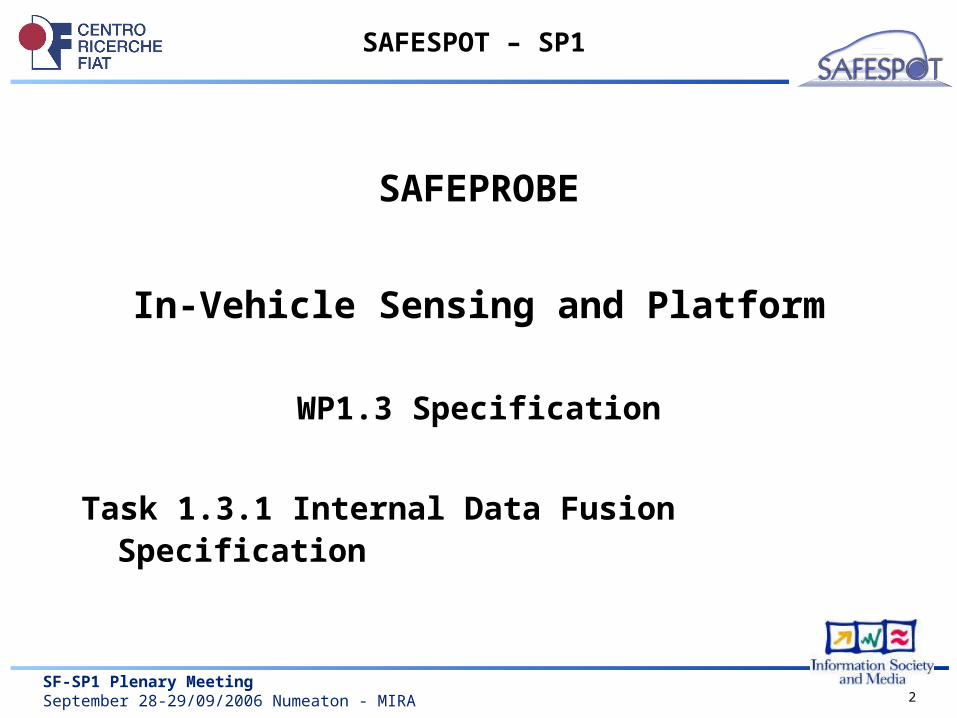
WORK PLANWork-packageNo
Workpackage title Leader Person-months
Startmonth
Endmonth
WP1.3 Specification BOSCH 65.5 M 7 M 18
Task 1.3.1 Internal Data Fusion Specification
CRF M7 M12
Task 1.3.4 Data refinement Specification
CRF M12 M18
Partners CRF REGIENOV
VOLVO BOSCH PIAGGIO IBEO
SVDO ICCS MMSE
Task 1.3.1 x x x x x x
Task 1.3.4 x x x x
4SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
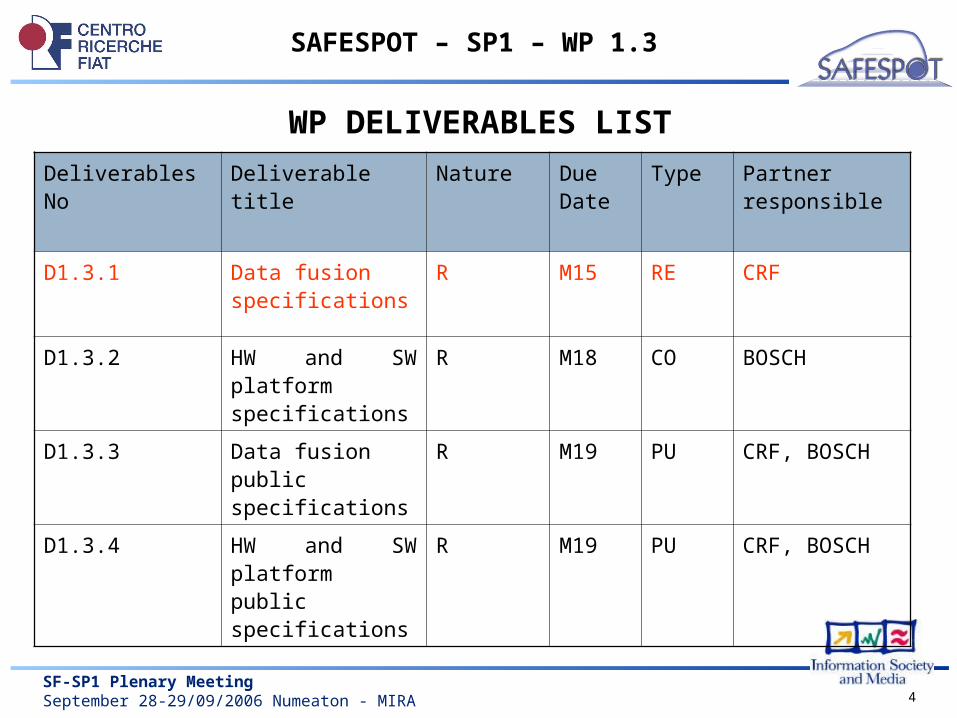
WP DELIVERABLES LIST
Deliverables No Deliverable title Nature Due Date
Type Partner responsible
D1.3.1 Data fusion specifications
R M15 RE CRF
D1.3.2 HW and SW platform specifications
R M18 CO BOSCH
D1.3.3 Data fusion public specifications
R M19 PU CRF, BOSCH
D1.3.4 HW and SW platform public specifications
R M19 PU CRF, BOSCH
5SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
Main Activities:1. Development of data fusion algorithms at different levels depending on:
a. specific goal to reach;
b. type of vehicles (cars, trucks, motorcycles) and equipment considered.
2. Implementation of data packages to be transmitted to the environment through V2V and V2I communication, using protocol defined within SP3
Synergy with IP Prevent – ProFusion II (http://www.prevent-ip.org)
Specification of the internal data fusion will be adapted from the recommendation of the sub-project ProFusion II.
Final result D1.3.1 Data fusion specification (M15)
6SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
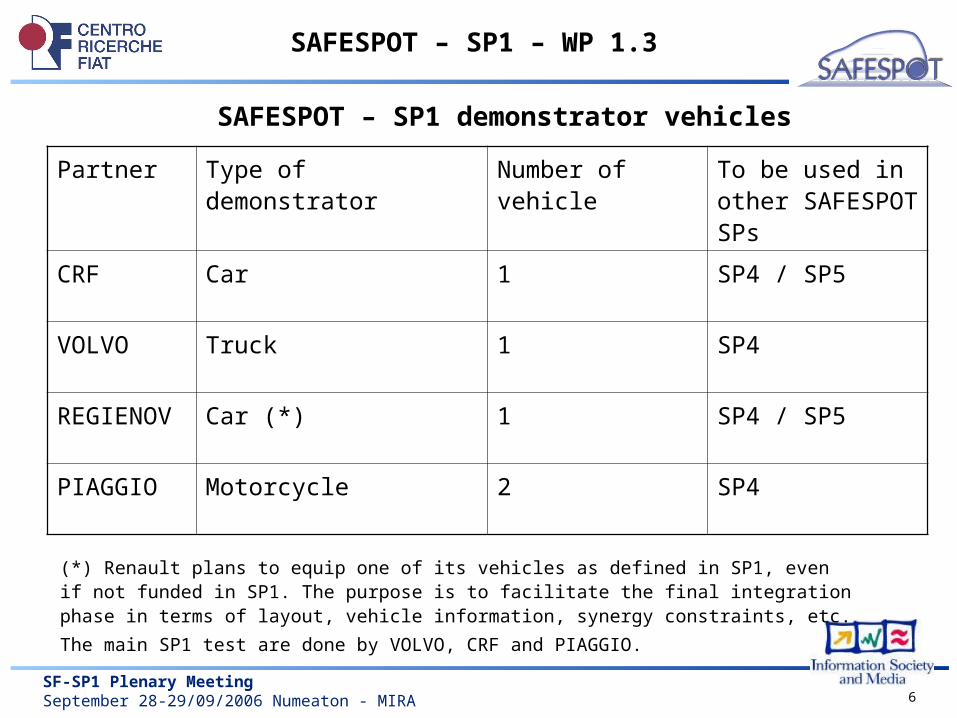
(*) Renault plans to equip one of its vehicles as defined in SP1, even if not funded in SP1. The purpose is to facilitate the final integration phase in terms of layout, vehicle information, synergy constraints, etc.
The main SP1 test are done by VOLVO, CRF and PIAGGIO.
Partner Type of demonstrator Number of vehicle To be used in other SAFESPOT SPs
CRF Car 1 SP4 / SP5
VOLVO Truck 1 SP4
REGIENOV Car (*) 1 SP4 / SP5
PIAGGIO Motorcycle 2 SP4
SAFESPOT – SP1 demonstrator vehicles
7SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
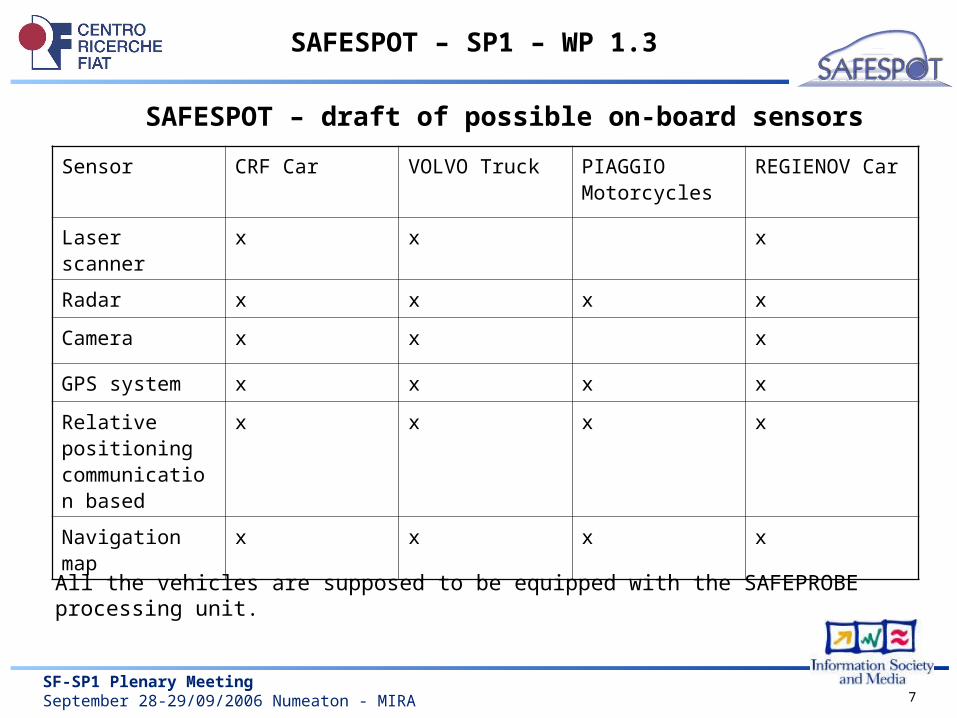
Sensor CRF Car VOLVO Truck PIAGGIO Motorcycles
REGIENOV Car
Laser scanner x x x
Radar x x x x
Camera x x x
GPS system x x x x
Relative positioning communication based
x x x x
Navigation map x x x x
All the vehicles are supposed to be equipped with the SAFEPROBE processing unit.
SAFESPOT – draft of possible on-board sensors
8SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
DATA FUSION – MAIN FEATURES
1. Principal aim is to reconstruct the traffic scenario around the vehicle thanks to the data collected from homogeneous sensors.
2. Depending on the number of on-board sensors, the reconstruction will be more or less precise.
3. The data fusion algorithms have to be flexible and modular enough to be used in different kinds of vehicle using different equipment.
4. The data fusion algorithms have to based on the architecture defined by VSP inside PROFUSION 2 data-fusion architecture.
5. The following slide report the working proposal to be shared by all the involved partners.
9SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
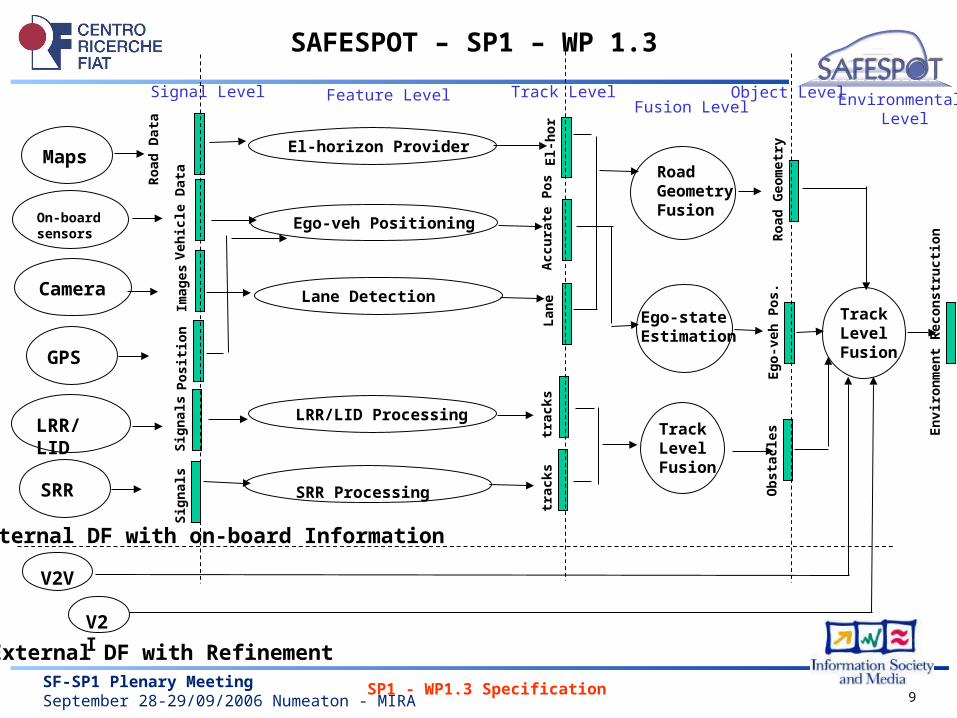
SP1 - WP1.3 Specification
LRR/LID
On-board sensors
GPS
Camera
SRR
V2V
V2I
External DF with Refinement
Internal DF with on-board Information
MapsR
oad
Dat
a
Veh
icle
Dat
aIm
ages
Po
siti
on
Signal Level
Sig
nal
sS
ign
als
El-horizon Provider
SRR Processing
Ego-veh Positioning
Lane Detection
LRR/LID Processing
El-
ho
rA
ccu
rate
Po
sL
ane
Track Level
trac
kstr
acks
Feature Level
RoadGeometryFusion
Ego-stateEstimation
TrackLevelFusion
TrackLevelFusion
Ro
ad G
eom
etry
Eg
o-v
eh P
os.
Ob
stac
les
En
viro
nm
ent
Rec
on
stru
ctio
n
Fusion LevelObject Level Environmental
Level
10SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
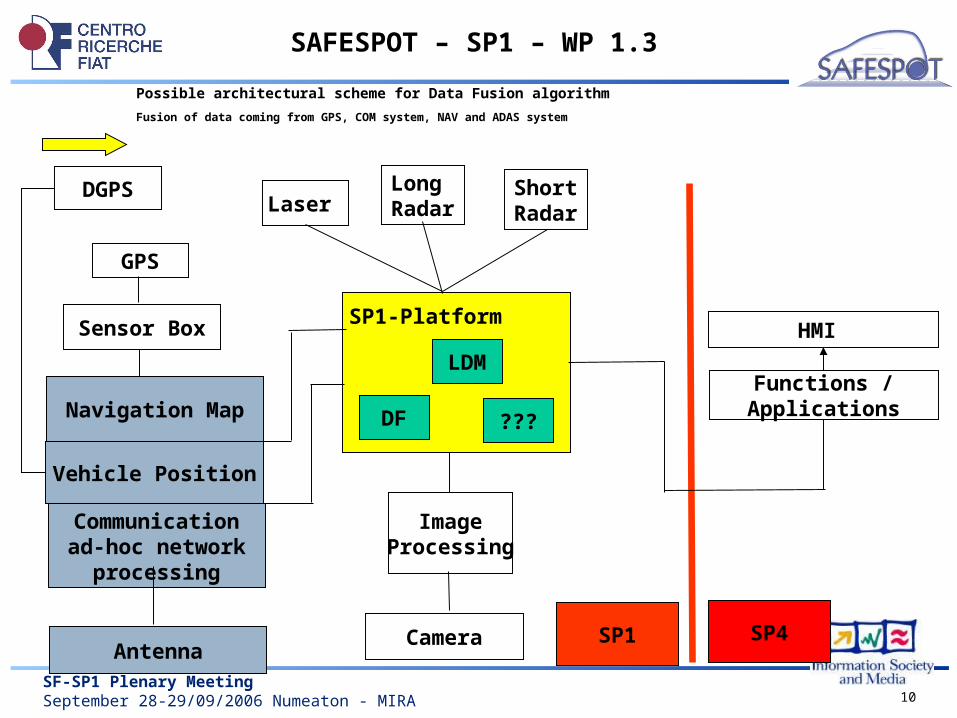
Possible architectural scheme for Data Fusion algorithm
Fusion of data coming from GPS, COM system, NAV and ADAS system
ImageProcessing
Navigation Map
Sensor Box
Laser
Vehicle Position
GPS
Functions / Applications
HMI
SP4SP1
DGPS
Camera
Communication ad-hoc network processing
Antenna
Long Radar
ShortRadar
SP1-Platform
LDM
???DF
11SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
OPEN ISSUES (1/2): • Input from SP4:
– Requirements based on scenarios and application definition
– Working table for SP4 User Needs & Requirements (presently, in definition phase)
– First Draft D4.2.4 – User Needs and Requirements (foreseen by 26/10)
• Output to SP4:
– Data fusion specification
– Definition of a common architecture
– Definition of the common protocol interface between SP1 and SP4
• Definition of the main partner’s role for each module of architecture• Constraints and specific / particular issues to be taken into account for each block• Definition of number of components to be provided or bought
12SF-SP1 Plenary MeetingSeptember 28-29/09/2006 Numeaton - MIRA
SAFESPOT – SP1 – WP 1.3
OPEN ISSUES (2/2):
• Some specific points are:
– Is D-Space ECU able to manage the LAN?
– Is SP3 able to provide the blocks in blue? • Definition of the interface for the data flow and data exchange in terms of
Data format
Availability
Accuracy
Resolution
Latency
Update rate