Embed Size (px)
Citation preview

Helwan University
From the SelectedWorks of Omar H. Abdalla
November, 1989
Integrated excitation and turbine control in amultimachine power systemP. A. W. WalkerA. M. SeragOmar H. Abdalla
Available at: https://works.bepress.com/omar/41/

Integrated excitation and turbine control in amultimachine power system
P.A.W. Walker BEng, PhD, CEng, MIEEA.M. Serag, MSc(Eng), PhDProf. O.H. Abdalla, MSc(Eng), PhD
Indexing terms: Control systems, Power systems and plant, Turbogenerators
Abstract: This paper is concerned with modellingand optimal control studies, by computer simula-tion, of a multimachine power system comprisingthree interconnected generator units. The mosteffective generating unit, for the application ofcontrol, is determined by using eigenvalueanalysis. A multi-input/multi-output linear modelof the system, as seen from this unit, is obtainedby least-squares identification. On the basis of thismodel a multivariable controller is designed, byminimising a quadratic performance index, usingthe dynamic programming procedure. This localcontroller employs output feedback, and providesintegrated control of the exciter and turbine-valveinputs. Multivariable controllers are also designedand applied to the other generating units, to allowcomparative system performance to be examined.System behaviour is assessed in relation to small-and large-disturbance studies. Simulation resultsinclude responses to three-phase short circuits,and dynamic and transient stability boundaries.
Principal symbols
6
H
> lkq
TJTm
Kef
= rotor angle= excitation/field voltage= inertia constant= stator currents in d- and g-axes= field current= damper winding currents in d- and g-axes= voltage regulator gain= damping coefficient= regulator stabilising circuit gain/time constant= 100/(% steady state speed regulation)= terminal real/reactive power= electrical/mechanical torque= gate/valve position= output of permanent speed droop and tran-
sient droop compensations= stator voltage in d- and q-axis circuits= terminal reference voltage= terminal voltage
Paper 6894C (PI, P9), received 11th November 1988P.A.W. Walker is with the Department of Electrical Engineering &Electronics, The University, PO Box 147, Liverpool, L69 3BX, UnitedKingdomProf. Abdalla and A.M. Serag are with the Department of ElectricalMachines and Power Engineering, Faculty of Engineering and Tech-nology, University of Helwan, Helwan, Cairo, Egypt
akq
fd
fkd
Xkd > Xkq
rfdrkd > rkq
G/E
= mutual reactance between armature and fieldwinding
= mutual reactance between armature andd-axis damper winding
= mutual reactance between armature andg-axis damper winding
= synthronous reactance in d- and g-axis cir-cuits
= self reactance of field winding= mutual reactance between field winding and
rf-axis damper winding= self reactances in d- and <?-axis damper
winding= stator resistance in d- or q-axis circuits= field resistance= resistance of d- and <j-axis damper windings= direct and quadrature stator flux linkages= field flux linkage= damper winding flux linkages in d- and g-axes= steam chest time constant= governor response time= exciter/regulator amplifier time constant= exciter/regulator amplifier time constants= dashpot/water starting time constants= permanent/transient speed droop coefficients
Introduction
Attention is currently being focussed on the applicationof modern control theory to the design of integratedcontrol schemes for turbogenerators in power systems,with the objective of extending the operational marginsof stability and satisfying increasingly complex controlrequirements. It has been shown [1, 2] that substantialimprovements in stability may be achieved. Practical dif-ficulties with physical readability which can arise withmultivariable optimal controllers, due to lack of fullaccess to the system state vector, have been overcome byemploying output rather than state feedback [3, 4]. Thisrequires only the measurement of readily available localoutput signals such as terminal power, terminal voltageand turbine speed. In the approach adopted by theauthors, the linearised system dynamics are modelled byan output prediction equation [5], in terms of mea-sureable outputs and known control inputs. This leads toan integrated scheme of exciter and turbine control, thathas been rigorously tested for a single generating unit bycomputer simulation and experimentally on a laboratorymicromachine system [6].
This paper describes the development of this outputcontroller in a multimachine environment, in which the
IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989 331

dynamic interactions among the various machines andcontrollers may be strong. It is concerned with modellingand optimal control studies, by computer simulation, of amultimachine power system composed of three intercon-nected generator units each supplying a local load [7]. Afully optimal control structure would require transfer ofoutput measurements and control signals between remo-tely situated power plants, which is not regarded as prac-tical. Attention is therefore concentrated on the design oflocal multivariable optimal controllers on each individualunit, which is considered more realistic.
These controllers rely on locally available measure-ments using, effectively, equivalent models of the systemas seen from each generating unit. An extensive study [7]of local (non-interacting) optimal controllers, in contrastto a global optimal controller, was undertaken on a two-machine system. The global controller produced almostinsignificant improvements in system damping and tran-sient performance, thus justifying the more practical localcontrol configurations adopted in this paper.
Recent studies of multimachine systems [8-12] haveindicated that, in terms of improving system per-formance, introducing controllers on a limited number ofselected machines may be quite sufficient. Selection ofthese machines is based on eigenvalue/eigenvectoranalysis. Controllers introduced on these selectedmachines, were restricted to the excitation system and didnot exploit the capability of governor control. Otherstudies consider the control of both exciter and governor[11, 13, 14]. In the present paper the most effective candi-date generating unit for the application of optimalcontrol, is determined by evaluating the sensitivity of thesystem eigenvalues to changes in damping at individualmachines [10]. The nonlinear dynamics, relative to theselected generating unit, are represented by a reduced-order linear multivariable input/output model. This isobtained by recursive least-squares identification, ratherthan analytical linearization of the nonlinear systemmodel. A local optimal controller is then designed for thismachine, on the basis of the identified model. For thepurpose of comparison, similar controllers are alsodesigned for the other generating units in the multi-machine system, using separate models as seen from eachmachine.
The behaviour of the optimally controlled powersystem, in relation to that with conventional automaticvoltage regulators and speed governors, is then rigor-ously assessed by computer simulation using the non-linear system representation. Results include systemresponses to a variety of disturbances such as three-phaseshort circuits, and dynamic and transient stability bound-aries.
This paper differs from previously reported studiesconcerned with the application of optimal control theoryin multimachine power systems [8-10, 12-17] in severalrespects. Particularly in the emphasis on the use of physi-cally realisable low-order noninteracting controllers onselected units, synthesised from locally identified modelsof the system dynamics as seen from these units. Also inthe study of both small- and large-scale disturbances.
2 Multimachine power system
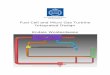
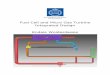
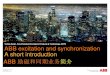
2.1 System description and nonlinear modelThe configuration studied is shown in Fig. 1. It is com-posed of three interconnected nuclear, steam and hydroplants of equal rating, each having a local load. The dis-tance between the hydro and steam units is considerably
longer than that between the steam and nuclear units. Ineach case the synchronous generator is represented by a
"23
L3
Fig. 1 Power system configuration
seventh order nonlinear model based on Park's equa-tions. Loads are represented by constant impedances andthe transmission lines by lumped series impedances. Thetransformers at each unit are represented by seriesimpedances.
The generators are all equipped with a second orderIEEE Type ST1 static excitation system [18], with ceilinglimits of the excitation voltage as shown in Fig. 2. Thedynamics of the hydro turbine and the associated mech-anical hydraulic speed governing system are representedby a third-order model [19], as shown in Fig. 3. For thesteam and nuclear units, the steam turbines have conven-tional electro-hydraulic speed governors, and are rep-
V - Vref T
K A
i+srA
s K f
1 + s r f
-
5.5
Efd
-5.5
Fig. 2 Static thyristor excitation system for all units
J'ref
11rg
1
s
r 1
®" 1 "" 1
esrr
1.STr
TG
turbine1 -STu,
\*0.5stiJJ
Fig. 3 Hydraulic turbine and mechanical-hydraulic speed governingsystem
332 IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989

resented by second order models, as shown in Fig. 4.Provision is made for the imposition of rate and positionlimits on both servomotors.
Following these initialising calculations, the iterativecomputation of the system dynamic response can com-mence. At each integration step, the nonlinear differential
' r e f
k •T
1
r 3
1
s
1•
TGV
0
turbine1
1*srch
Fig. 4 Steam turbine and electro-hydraulic speed governor
The system equations are listed in Appendix 8.1, andparameter values in Appendix 8.2. It should be notedthat the three-machine power system considered in thisstudy differs from that of Reference 10 in that it includesrepresentation of transformers of each generating unit,and also in the representation of excitation and govern-ing systems of the steam unit.
2.2 System simulationThe digital simulation involves simultaneous solution ofthe complete nonlinear dynamical model, together withthe solution of the linear voltage and current algebraicequations of the network. The program reads the initialnodal specifications, and generates the steady state loadflow solution using the Gauss-Seidel iteration method.The initial steady-state values of the variables at eachmachine are then calculated, with respect to the machinereference frame. A common reference frame is assumed tobe rotating in synchronism with one arbitrarily chosenmachine. The hydro unit has been selected in this study.The network equations are referred to the common refer-ence frame and have the following expanded real form[20].
Qi
Di
Fig. 5 Relationship between D-Q common reference frame and d-qframe of the ith machine
equations are solved using the fourth-order Runge-Kutta-Merson procedure. For each machine the currentsId and Iq are then calculated with respect to the machinereference frame and then transformed to the common ref-erence frame using the transformation.
Q
cos -sincos
(4)
Then, the network algebraic eqns. 1 and 3 are solved togive the voltages at the terminals of each generator.
[D1
^D2
1Q2
^D3rQ3j
G21
B21
G3i
B2l
G21
GI\
" 1 2
G22
^ 2 2
G3 2
-B12
-B 22
G2 2
^32
G3 2
G13
G 2 3
^ 2 3
G33
^ 3 3
- ^ 1 3
G13
- B 2 3
G23
- # 3 3
G33
> m
vD2VQ2
vQ3
(1)
Here, lDi, IQi, VDi and VQi are the ith nodal current andvoltage components, in the direct and quadrature axes,respectively, of the common reference frame. The entriesGik and Bik in the matrix eqn. 1, are the real and imagin-ary components of the self and mutual admittances of thenetwork, i.e.
= Gik+jBik i = l , 2 , 3 and k = 1, 2, 3 (2)
The reference frame of the ith machine is related to thecommon reference frame by the transformation
(3)rvdil = Tcos 5{ -s in^. i-MX.IU J LsinSi cosaj [_VQi\
Here, <5,- is the angle between the machine reference axes{di, qt), and the common reference axes (D, Q) shown inFig. 5. The solution of the network equations and theabove transformation relationships allow the voltages atthe generator terminals (Vdi, Vqi) to be calculated. Thesevoltages are then used to calculate the initial steady-statevalues of the machine variables.
IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989
These voltages are transformed to the machine referenceframes to give Vdi, Vqi ready for use in the next integra-tion step.
The integration step should be the largest valuepossible, consistent with required accuracy and minimumcomputing time. In most of this work it was chosen tobe 1 ms, though in some cases, e.g. when the generatorsare operating at low power levels, it was reduced to0.05-0.01 ms.
3 Modelling and control
Implementation of optimal control policies in the powersystem described in the previous Section is based on thepremise that feedback control schemes requiring full stateinformation are not physically realisable. Thus, manystates, e.g. rotor angle and field flux linkages, are eitherdifficult to measure or simply not practically available fordirect measurement. It is more realistic to limit plant
333
measurements to those few outputs, such as terminalvoltage, power and rotor speed of the power unit, whosebehaviour must be directly controlled to satisfy systemoperational requirements.
For control purposes, the dynamics of the nonlinearsystem, linearised about a particular operating point,are represented by the output/input prediction equation(4,5]
Auk (5)
where
This linear multivariable model predicts the outputyk+i(P x 1) m terms of a history of N previous outputmeasurements yk back to gk-N + i and N previous con-trols uk back to uk_N+l. For an observable system with nstates, the minimum number of stages N is n/p roundedup to the nearest integer. The output gk-N+i representsthe first r rows of yk-N+1 such that p(N — 1) + r = nwith r > 0. Eqn. 5 completely defines the dynamics of alinear system without reference to the state vector. Deri-vation of an optimal control law starts with the augmen-tation of eqn. 5 into the iterative compound vector form
= 0wk (6)
This equation may be used to generate minimum timecontrol, or control based on the minimisation of a quad-ratic performance index, specified in terms of inputs andoutputs of the process. Such a cost functional may takethe form
J= (7)
Minimisation of this s-stage process by the dynamicprogramming procedure/leads to the invariant optimalcontrol law
uk(m x 1) = Fwk (8)
as s becomes increasingly large. The number of param-eters to be selected in the weighting matrices Q and Hmay be reduced to (p + m) by the simplifying assump-tions that off-diagonal elements are zero, weighting oncorresponding output terms is identical, and the weigh-ting on past controls uk_1 back to uk_N+1 is zero. Thedynamic programming algorithm is listed in Appendix8.3.
In the present context of power system control theproblem is to establish values of the parameter matrices<f> and A in eqn. 5, so that the prediction equation pro-vides a satisfactory representation of system behaviour.This can be achieved by one of the following modellingapproaches:
(a) directly from a linearisation of the nonlinear modelof the system and application of the output predictionanalysis [5]. This method requires the initial formation ofthe state equation
x = Ax + Bu (9)
of the linearised system, with corresponding output equa-tion
y = Cx (10)
for each power unit. The high dimensionality of the coef-ficient matrices, A and B for the multimachine systemmakes this approach impractical, as accurate informationabout many of the system parameters will not generally
be available. Although reduced order linearised modelsmay be obtained by neglecting the effect of some com-ponents, the accuracy of these models and performanceof controllers based on them may not be guaranteed.
(b) The second method, which has been adopted bythe authors, is to develop the linearised model of eqn. 5directly, employing least squares identification of theavailable nonlinear model of the system. This method, bycontrast, requires only the measurement of availableplant output signals and control inputs, and is well suitedto real-time modelling applications. In addition, it pro-vides the opportunity to employ a lower order model ofthe system dynamics, with a concomitant reduction incontroller dimensions. The number of stages N in eqn. 5can be selected to be less than the theoretical value indi-cated above, whilst still modelling the plant to an accept-able accuracy. Previous work has shown that reducedorder identified models of a turbo-generator may bemore representative of system dynamics than analyticalmodels [21]. The recursive least-squares identificationalgorithm is listed in Appendix 8.4.
Reference must also be made to the theoretical impli-cations of modelling and controlling the power system ona local, as opposed to global, basis in relation to theoutput prediction equation (eqn. 5). Global controlimplies a fully optimal output control structure based oneqn. 8. The output prediction equation (eqn. 5) will takethe partitioned form
where, typically,
yh, k+l
ys,k+i
_yn,k+l_
=<t>hh<t>sh
_<t>nh
+
<Phs <Phn<Pss ^ s n
<t>ns <t>nn_
An h Ah s
As n A s s
_ nh ns
~">h,k
*>s,k
-Wn,k_
Af c n
Asn
Ann
" h , ilc
«S,fcUn,k
(11)
»h,k
"s.kUn,k_
= F
">h,kWs,k
wn k
The constant matrices of eqn. 11 can be obtained usingleast squares identification. On the basis of thesematrices, the global optimal controller of eqn. 8 can bedeveloped and will take the form
(13)
It is observed that both the identification and controlphases will require transfer of output and control signalsfrom remotely situated power plants to a central com-puter, and this may well be difficult to arrange in prac-tice.
By contrast, with local (suboptimal) control thedependence of the separate controllers of each unit, onoutput/control signals from remote plant is abolished.The system dynamics are first fully modelled by aseparate output prediction equation for yh, ys and yn rela-tive to each generator unit in turn. For example, for thehydro unit
, k+l — IM hh
H>h,k
vhs vn n]'h.k*s,k
Lun, kj
(14)
334 IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989

where
v = [«' _ : • • • : u' T (15)
For the specific purposes of linear modelling and controlsystem design, the impact on the hydro machine outputsyh of changes in the control to the remote steam unit us
and the remote nuclear unit un is now assumed to be neg-ligible, i.e. the driving matrices vfe and vhn and the tran-sition matrices X^ and Xnn are zero. The reduced form ofeqn. 14 is presented in eqn. 16, together with the corre-sponding equations for the steam and nuclear plants.
y. . . . = LtukWu t. + VUUL L (16d)
ys, k+1 = Us*»,. k + vM«s, ft (16ft)
y n k+ 1 = V^nn Wn k + VnnUn k (16c)
These represent the dynamics of the complete powersystem by three equivalent single-machine infinite busbarmodels, as observed separately from each respectivemachine. Each equation embraces all the dynamic modesof the power system, whilst excluding the effect of controlinputs to remote units.
Optimal control analysis by dynamic programmingnow leads to the respective noninteracting controllers
"h, k = ">h, k
(17)
for each unit. These may be compared with the globalinteractive controller of eqn. 13. This change of emphasisfrom global interacting control to local sub-optimal non-interacting control, in the context of optimal state feed-back control, seems to have been first envisaged [22] fora linearised two-areas system.
4 Results
4.1 Eigenvalue assessmentIt is envisaged that optimal controllers might well beintroduced on only a limited number of units in a multi-machine system. A first requirement is therefore to selectcandidate machines for optimal control on the basis oftheir potential for making the greatest positive impact onoverall system stability. The criterion of selection of suchmachines used here is the sensitivity of the real part ofthe eigenvalues related to rotor oscillations, to an inten-tionally inserted positive damping term in the equationsof motion of each unit in turn [10].
The linearised model for the power system with con-ventional controllers is obtained by linearising the non-linear equations using small perturbation theory. Thederivation of this linearised model to obtain the state-space eqn. 9 is fully described in Reference 10. The eigen-values of the state coefficient matrix A at the nominaloperating point are computed to be
A. 2 =
^3.4 =
*3.6 =
X7 =
X8 =
X9 =
; =
-3145.9 ±71085.9
-338.1 ±71151.0
-127.6 ±7773.8
-346.7+70.0
-350.03+70.0
-198.27+70.0
- 5 8 . 9 5 + /0.0
xlx = -32.5+70.0
Xl2= -30.3+jO.O
Xl3 = -21.47 + 7O.O
A1 4= -18.57 + 7O.O
^15.16= -2.06 ±710.07
A17 = -10.66 + 7O.O
^18.19= -0.573 ±7*6.83
^20,21 = -6.13 ±72.12
^22,23= -4.95 ±70.06
^24,25 = "0.63 ±71.77
X26 = -2 .64+70.0
X21= -0.028+7O.O
^28,29= - 1 0 3 ±7"0.64
X30= -1.78±7"0.0
A31 = -1 .44 ±70.0
A32 = -l.O5±7"O.O
A33 = -1 .13 ±70.0
Eigenvalue sensitivities to changes in the damping coeffi-cient Kd were assessed for each machine in turn. A usefulmeasure of the damping of the oscillatory modes, is basedon the movement of the normalised real parts of theappropriate eigenvalues defined by
(18)Re (Xd I - |Re(A0)|
I Re M lwhere Re (Xo) is the real part of the eigenvalue corre-sponding to the initial value of Kd and Re (X) is the realpart of the eigenvalue with Kd incremented by AKd.
The most sensitive eigenvalues were identified as being^i5,i6» ^18.19 a n d ^24,25> a n d their loci in the s-planewere examined over a wide range of operating conditions.These studies led to the conclusion that A18 19 was themost critical pair, rapidly approaching the imaginary axisof the s-plane as the operating point of the hydro unitgenerator moved increasingly into the leading powerfactor region. The sensitivity of this pair of eigenvalues tochanges in mechanical damping introduced in each unitin turn was therefore taken as the guide for selecting theorder of candidature of the machines to have optimalrather than conventional control. Fig. 6 shows the pro-portional movement in the real part of Xl8 1 9 , as definedby eqn. 18, as mechanical damping is introduced intoeach unit in turn. The relationships are almost linear.Clearly the eigenvalues are particularly sensitive tochanges in damping in the hydro-unit, which thereforehas first priority followed by the steam and then nuclearunits.
42 Identification resultsA reduced order model of the power system dynamics, asseen from the hydro unit, was obtained by recursive leastsquares identification. The objective of identification wasto establish values of the parameter matrix pair {nhh, vhh},so that eqn. 16a provides a satisfactory representation ofthe system dynamics as observed at the hydro unit abouta particular operating point. The conventional control-lers were removed from the hydro unit as it was beingidentified, though being retained on the remaining
IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989 335

machines. For this two-input system, the first PRBSsequence is generated from a simulated shift register. Thesecond PRBS sequence is generated from the first byusing the relationship [23]
dr = (-l)'Cr (19)
where Cr is the original signal and r is the number of theelement Cr in the sequence. The PRBS signals are
2.8 -
2.
2.0
1.6
1.2
0.8
0.4
0.0
hydro
0.0 0.04 0.08 0.12 0.16
Fig. 6 Eigenvalue sensitivities
updated every 100 ms, and the input/output data streamis assembled over 10 s with a sampling period of 20 ms.The data stream is employed in the recursive identifica-tion algorithm, to produce the input/output model.
A fifth-order model of the hydro unit is obtained withn = 5, p = 3, N = 2 and r = 2 in eqns. 5 and 16a, where
yk = [Pt&vtyk (20)
ft = [J\*]i (21)
»k = [.ueug]tk . . . ^ (22)
wk — LF* : Sk-1 : «fc—iT" (23)
The components of these vectors are the deviation of thevariables from their corresponding steady-state values.The three selected components of the output vector yrepresent the principal generator quantities to be con-trolled and are all locally accessible for measurement.
The results of the identification are shown in Fig. 7.Superimposed on the data stream is regenerated data,obtained by subjecting the identified linear input/outputmodel of eqn. 16a to the same PRBS input vectorsequence as the nonlinear system model. The effectivenessof the identified model can thus be judged visually, bydirect comparison between original and regenerated data.
7 Modelling the hydro unit— nonlinear model• - identified model
The performance of the identification algorithm wasfound to be critically dependent both upon an optimumchoice of the magnitude of these disturbances and uponthe magnitude of the initial setting bl of the covariancematrix P. Typical values of b for the hydro, steam andnuclear units were 1010, 1024 and 105, respectively.Regenerated displays for higher-order models indicatedno improvement in model matching, either by visualassessment or computation of the normalised sum of thesquares of the residuals NSSR [6] defined as
500
NSSR =
[yXnonlinear model) — ^-(identified model)]2
L
RMS value of y,-(nonlinear model)
(24)
for individual plant outputs {y,} as tabulated in Table 1.The respective identified system matrices for eqn. 16a areshown in table 2.
Table 1 : Accuracy of identification index—NSSR
Variable Hydro Steam Nuclearunit unit unit
<$ 6.95 8.98 3.90v, 0.12 0.34 0.29P. 0.37 0.77 0.87
Table 2: Identified system matrices
Unit
Hydro
Steam
Nuclear
1.946-0.463-0.133
1.84-0.690-0.022
1.62-0.753
0.127
0.011.8580.00.0531.961
-0.017
0.041.964
-0.003
0.001-0.032
0.9980.0010.0040.992
0.094-0.05
0.990
-0.9540.3520.132
-0.8460.6830.027
-0.670.78
-0.127
-0.01-0.869
0.0-0.053-0.961
0.017
-0.025-0.97
0.002
-0.002-0.002
0.002-0.001
0.00.0
-0.0020.0010.0
0.00.030.00.00.0110.0
0.0010.0050.0
0.003 -0.002-0.002 -0.1870.003 0.00.002 0.0
-0.001 0.0030.0 0.0
0.005 0.00.003 0.0010.001 0.0
336 IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989

Similar models for the steam and nuclear units arealso obtained using the same identification procedure.The results are listed in Tables 1 and 2. The respectivemagnitudes of the PRBS signals applied to exciter andgovernor inputs as a percentage of their respective steadystate values were ±5% and ±1.2% for the hydro unit,±20% and ±2% for the steam unit and ±11% and±4% for the nuclear unit. The conventional controllerswere removed from each particular unit as it was beingidentified, though being retained on the other machines,as were optimal controllers on previous machines oncethese had been designed.
It may be noted that the figures in Table 1, measuringaccuracy of model matching for rotor speed deviation,are very similar to those presented in reference 6 for testson a laboratory model micromachine system connectedto an infinite busbar.
4.3 Design of local controllersAs the identified models were successively derived, theoptimal controllers of eqn. 17 were designed for thehydro, steam and nuclear units in turn, progressivelyreplacing the original conventional controllers. As ex-plained in Section 3, the number of parameters in thediagonal weighting matrices Q and H of eqn. 7 werep + m = 5. The values were selected to achieve the bestdamped response to an induced speed disturbance of 0.2rad/s in the unit under consideration, and are shown inTable 3. The feedback control matrices are calculatedand listed in Table 4.
Table 3: Weighting parameters
Generatingunit
HydroSteamNuclear
P,
0.142.55.0
Q6
0.020.20.2
12001000200
H
0.0010.0010.001
2.22.0
20
4.4 Small disturbance studiesFig. 8 illustrates the improved responses to small dis-turbances in each generating unit, with various controllercombinations. The responses of the rotor angle differ-ences are progressively improved, as optimal controllersare introduced on each machine in turn. Employing anoptimal controller on the hydro unit improves thedamping in the overall system, confirming the selection ofthis machine as first candidate for applying optimalcontrol.
Fig. 9 portrays the dynamic stability boundaries, atthe hydro unit, for a range of different combinations ofcontrol configurations. This shows a substantial exten-sion of the steady state stability limits with an optimalcontroller in place on the hydro unit, but apparently nofurther improvement with optimal controllers [1] on theremaining machines.
Further insight into the relative stability of differentcontrol configurations in the dynamic stability bound-aries can be gained by studying the system damping. It is
\\T£
o -1
"- -2
a; 0
o "'u -2
•A
1r
time.s 'Fig. 8 System response to small disturbancea Disturbance in hydro unit
Hydro Steam Nuclearconv. conv. conv.opt. conv. conv.
b Disturbance in steam unitHydro Steam Nuclearconv. conv. conv.opt. conv. conv.opt. opt. conv.
c Disturbance in nuclear unitHydro Steam Nuclearopt. conv. conv.opt. opt. conv.opt. opt. opt.
A\
—, 1.0
0.8
0.6
0.4
0.2-1.0
Fig. 9
- 0 . 8 -0.2-0.6 -0.4-QGT 3
Dynamic stability boundaries at hydro unit
0.0
Hydroopen-loopconv.
("optimal/ optimal/optimal
Steamopen-loopconv.conv.optimaloptimal
Nuclearopen-loopconv.conv.conv.optimal
Table 4: Optimal controllers
Hydro
Steam
47.930.02
-58.963.05
0.377 -306.10.405 0.44
-47.66-0.116
-0.256 -0.72 0.048-0.345 -0.001 0.012
69.2-2.82
-683.3-5.67
46.38 -64.08 -0.128 0.128-4.50 2.43 -0.004 -0.036
Nuclear -119.4 41.93 -233.4 103.6 -32.67Fn -0.213 -0.423 -0.165 -0.166 0.416
0.214 0.0390.0 -0.002
IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989 337

necessary to determine the amount of negative damping— KdS required in eqn. 32 to cancel out that inherent inthe system. The value of Kd to make the system oscillatewith constant amplitude, at a particular operating point,then gives a measure of the damping in the system. Thevariation in Kd, for different levels of reactive power atthe hydro unit busbar, is shown in Fig. 10. The dampingprofiles for the hydro unit can be interpreted with refer-ence to the dynamic stability boundaries in Fig. 9. Theseprofiles demonstrate progressive improvement indamping throughout the stable area of the leading powerfactor region as optimal controllers are introduced oneach machine in turn. The principal improvement in thestability of the power system is achieved by installation ofan optimal controller on the hydro unit.
4.5 Large disturbance studiesFig. 11 shows the system response to a three-phase shortcircuit to earth at busbar 3, which is cleared after 330 msand illustrates the responses for different control com-binations. Implementing optimal control on the hydrounit alone provides marked improvement, the terminalvoltage settling within 1 s. The first swings of the rotorangle displacements <513 and (523 are considerably reducedin comparison with the swings with conventional control-lers. The oscillations settle out in about 2.5 s. Introducingoptimal controllers on the remaining units has little effecton the system response.
Finally, transient stability boundaries were obtainedby simulating a three-phase short-circuit fault to earth atbusbar 3, and clearing the fault without switching outthe line. The boundaries of Fig. 12 are presented in termsof critical fault clearing time TCC against terminal
reactive power with a fixed power at busbar 3(PGT3 = 0.81 p.u.). As might be anticipated from pre-vious results, the principal improvement occurs withoptimal control restricted to the hydro unit.
-.0.25
0.20
I <'
0.15
0.10
0.05
0.0
-1.0
Fig. 10
-0.8 -0.2 0.0-0.6 -0.4-QGT3, p.u.
Damping coefficient against reactive power at hydro unit
Hydroopen-loopconv.optimaloptimaloptimal
Steami open-loop
conv.conv.optimaloptimal
Conclusions
Nuclearopen-loopconv.conv.conv.optimal
The paper describes simulation studies of the applicationof optimal multivariable control in a nonlinear three-
120
9060
30
0
-30
120
90
60
-30
906030
0
-30
12090
60
300
-30 2 3
t ime , s
1.2
0.8
0.4
0.0
1 .2
D 0.8D.
E 0.0
)
• f 7
I
2 3 4time, s
Fig. 11 Response to three-phase short circuit at busbar 3
TC = 330 msHydro Steam Nuclear
a conv. conv. conv.b optimal conv. conv.c optimal optimal conv.d optimal optimal optimal
338 IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989

machine power system. The resulting system per-formance is compared to that with conventional AVR
-
f r" -/ // //'/'; // // ;i .• / i i
500.0
4 0 0 , 0 - ^ ^
30 6 J ) - - " " ' '
200.0
100. 0
-1.0 -0.8 -0.6 -0.4 -0.2-QGT3 , p. u.
0.0 0.2
Fig. 12 Transient stability boundaries at hydro unit• Hydro Steam Hydro
open-loop open-loop open-loop— — • conv. conv. conv.
optimal conv. conv.-- optimal. optimal conv.
optimal optimal optimal
and speed governors on each machine. The design ofeach optimal controller is based on an identified reduced-order linear model for each unit in turn, and employsonly those readily available system variables which needto be directly controlled.
The study is characterised by two important features.Firstly the use of a direct procedure for guiding selectionof the most effective machines for stabilisation, based onthe sensitivity of the system eigenvalues to changes indamping at individual machines. Secondly the structureof the unit controllers is essentially noninteracting, andthus not dependent on information from remote units.
It is concluded that, in a multimachine power system,the application of optimal control on only a number ofmachines may be adequate provided that these machinesare properly selected. In the three-machine systemstudied here, the hydro unit is shown to be the principalcandidate for optimal control application.
6 Acknowledgments
The work described in this paper is part of a jointresearch programme between the University of Helwanand the University of Liverpool. The authors are gratefulto Professor J.D. Parsons for facilities in the Departmentof Electrical Engineering and Electronics, The Universityof Liverpool. Mr. Serag is grateful to the Egyptian Gov-ernment for financial support.
7 References
1 ANDERSON, J.H., and RAINA, V.M.: 'Power system excitationand governor design using optimal control theory', Int. J. Control,1974,19, (2), pp. 289-308
2 NEWTON, M.E., and HOGG, B.W.: 'Optimal control of a turbo-generator', Int. J. Control, 1977, 26, pp. 783-795
3 DAVTSON, E.J., and RAU, N.S.: The optimal output feedbackcontrol of a synchronous machine', IEEE Trans., 197-1, PAS-90,pp. 2123-2134
4 WALKER, P.A.W., and ABDALLA, O.H., 'Discrete control of ana.c. turbogenerator by output feedback', Proc. IEE, 1978, 125, (9),pp. 1031-1038
IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989
5 SANDOZ, DJ., and WALKER, P.A.W.: 'Output-prediction equa-tion with minimum-time control of linear multivariable systems',Proc. IEE, 1973,120, (3), pp. 385-389
6 ABDALLA, O.H., and WALKER, P.A.W.: 'Identification andoptimal output control of a laboratory power system', IEE Proc. D,1980,127, (6), pp. 237-244
7 SERAG, A.M.: 'Identification and optimal control of a multi-machine power system'. PhD Thesis, University of Helwan, Cairo,Egypt, 1985
8 DEMELLO, F.P., NOLAN, PJ., LASKOWSKI, T.F., andUNDRILL, J.M.: 'Coordinated application of stabilizers in multi-machine power systems', IEEE Trans., 1980, PAS-99, pp. 892-901
9 HIYAMA, T.: 'Coherency-based identification of optimum site forstabiliser application', IEE Proc. C, 1983,130, (2), pp. 71-74
10 ABDALLA, O.H., HASSAN, S.A., and TWEIG, N.T.: 'Co-ordinated stabilization of a multimachine power system', IEEETrans., 1984, PAS-103, pp. 483-494
11 OSHEBA, S.M., and ABDALLA, O.H.: 'Identification and optimalcontrol of a generating unit in an interconnected system', Electr.Mach. Power Syst., 1985,10, pp. 221-237
12 LIU, C, ZHOU, S.X., and FENG, Z.H.: 'Using decoupled charac-teristics in the synthesis of stabilizers in multimachine systems',IEEE Trans., 1987, PWRS-2, (1), pp. 31-36
13 OSHEBA, S.M., and HOGG, B.W.: 'Performance of state-spacecontrollers for turbogenerators in multi-machine power systems',IEEE Trans., 1982, PAS-101, pp. 3276-3283
14 MUSAAZI, M.K., JOHNSON, R.B.I., and CORY, B.J.: 'Multi-machine system transient stability improvement using transientpower system stabilizers', IEEE Trans., 1986, EC-1, (4), pp. 34-38
15 YU, Y.N., and MOUSSA, H.A.M.: 'Optimal stabilization of a multi-machine system', IEEE Trans., 1972, PAS-91, pp. 1174-1182
16 LIM, CM., and ELANGOVAN, S.: 'Design of stabilisers in multi-machine power systems', IEE Proc. C, 1985,132, (3), pp. 146-153
17 CHEN, C.L., and HSU, Y.Y.: 'Coordinated synthesis of multi-machine power system stabilizer using an efficient decentralizedmodel control (DMC) algorithm', IEEE Trans., 1987, PWRS-2, (3),pp. 543-551
18 IEEE COMMITTEE REPORT: 'Excitation system models forpower system stability studies', IEEE Trans., 1981, PAS-100,pp. 494-509
19 IEEE COMMITTEE REPORT: 'Dynamic models for steam andhydro turbines in power system studies', IEEE Trans., 1973,PAS-92, pp. 1904-1915
20 TAYLOR, D.G.: 'Analysis of synchronous machines connected topower system networks', Proc. IEE, 1962,109, pp. 606-610
21 SHARAF, M.M., and HOGG, B.W.: 'Identification and control of alaboratory model turbogenerator', Int. J. Control, 1980, 31, pp. 723-739
22 FOSHA, C.E., and ELGERD, O.I.: 'The megawatt-frequencycontrol problem: A new approach via optimal control theory', IEEETrans., 1970, PAS-89, pp. 563-571
23 BRIGGS, P.A.N., and GODFREY, K.R.: 'Pseudorandom signalsfor the dynamic analysis of multivariable systems', Proc. IEE, 1966,113, (7), pp. 1259-1267
8 Appendixes
8.1 Synchronous machine equations
(25)
(26)
(27)
(28)
(29)
(30)
339
xfd
Xad
_:xfkd
~xad
~Xd
~xakd
xfkd
xakd
xkd.
uJkd_
kq Jjfc
vfA = rfA\fd'fd ±*.
con
kd
• • •

v? =
82 System parameter valuesAll are p.u. except time constants.Synchronous machine
Parameter
HXf*
xadxdx*XakdXakqXfkdXkkdXkkq
RaRfRkd
Rkq
Transformers
hydrounit
3.01.11.01.20.81.00.61.01.10.80.010.00110.020.04
steamunit4.01.651.551.71.641.551.491.551.6051.520.0010.00070.01320.0132
nuclearunit3.251.971.972.01.911.861.771.861.9361.90.0050.00150.0380.038
Xt = 0.15 Rt = 0.03
Transmission lines
z12 = 0.02+;0.2; z23 = 0.05 +./0.8
Loads
Lx= L3 = 0.5 +./0.24; L2 = 1.4 +;0.68
(31)
(32)
(33)
(34)
(35)
Exciter
Parameter Steam Hydro Nuclear
Ka 200 100 200Kf 0.03 0.03 0.03xA 0.02 0.02 0.02xf 1.0 1.0 1.0
Turbine and speed governor
Steam and nuclear units Hydro units
xch 0.5 sKgs 25.0T3 0.1 S
axg
E
Tr
1.0 s0.040.2 s0.315.0 s
8.3 Dynamic programming algorithm
Fj = - [Cl'iQ + Dj)Cl + H] ~ lQ\Q + Dj)0 (36)
DJ+l=[0 + OFJ'Ce + DjXO + VFj] + F) HFj (37)
Starting with Do = 0, and iterating s times until Fj con-verges (to a specified accuracy) to give a constant feed-back control matrix F of eqn. 8.
8.4 Identification algorithmRe-writing eqn. 5 as
yk+1=ocsk (38)
where a = \_<j> A] and sk = [wk \ i/ky, the least squaresprocedure is
Sk Pk - 1
where dk = 1 + stkPk_lsk and
(39)
(40)
Starting estimates are chosen with a0 = 0 and P = blwith scalar b initially set to a large value.
340 IEE PROCEEDINGS, Vol. 136, Pt. C, No. 6, NOVEMBER 1989