Embed Size (px)
Citation preview

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
OMNIVIEWS DEMOS
• SURVEILLANCE DEMOS
•TRANSMISSION DEMO
•NAVIGATION DEMOS

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
Visual Tracking with Omnidirectional Sensors
Alexandre Bernardino, José Santos-Victor
Instituto Superior Técnico
The algorithm:Minimize the SSD.Test hypothesis of main translational motion. Consider other small deformations (e.g. rotation, scale) to
cope with deviations from model.Applications:
Robot navigation: track landmarks. Robot heading is directly related to target image position.
Video Conferencing/Surveillance: keep attention focus on people/faces.

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
• Demos:– Robot Navigation
– Visual Surveillance
Visual Tracking with Omnidirectional Sensors
INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
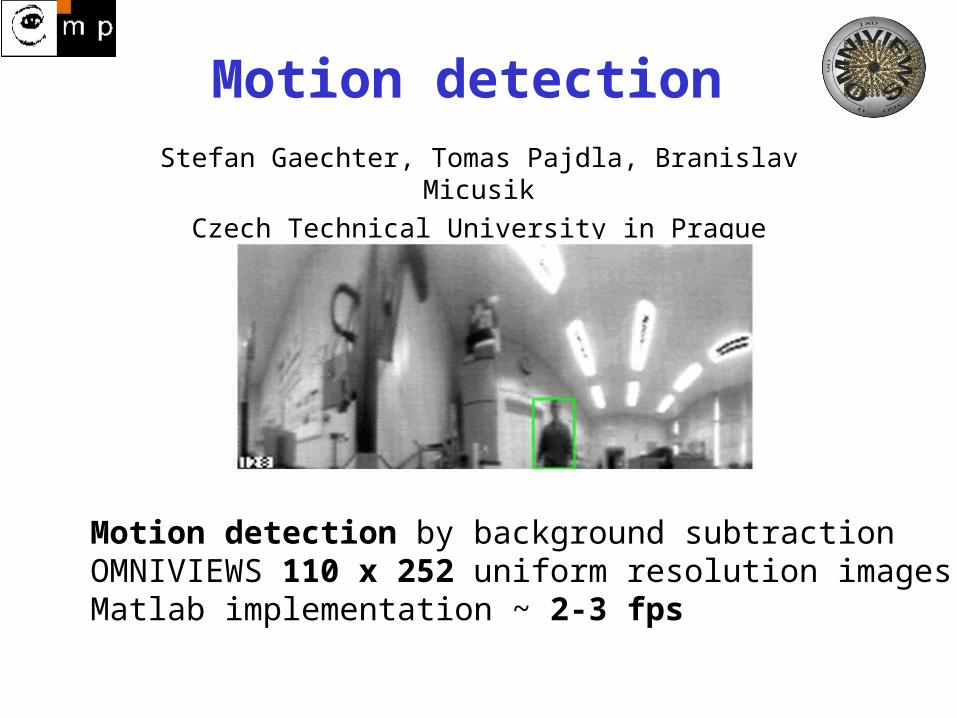
Motion detection Stefan Gaechter, Tomas Pajdla, Branislav
MicusikCzech Technical University in Prague
- Motion detection by background subtraction- OMNIVIEWS 110 x 252 uniform resolution images- Matlab implementation ~ 2-3 fps

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
OMNIVIEWS DEMOS
• SURVEILLANCE DEMOS
•TRANSMISSION DEMO
•NAVIGATION DEMOS

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
Transmission Demo
LaptopLaptop
IP Service ProviderIP Service Provider
VSR - ServerVSR - Server
Omniviews Camera(Observit office)
Omniviews Camera(Observit office)
Telephone LineTelephone Line
ADSL Internet ConnectionADSL Internet Connection
• Use industry standard codec tools (VSR from Observit)
• Images are processed as conventional one
• Connection with telephone line
• H263 Compression
INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
OMNIVIEWS DEMOS
• SURVEILLANCE DEMOS
•TRANSMISSION DEMO
•NAVIGATION DEMOS

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
Visual-based Robot Navigation & Teleoperation using the Omniviews Camera
Niall Winters, José Gaspar & José Santos-VictorInstituto Superior Técnico
• Topological Navigation
• Teleoperation
• Visual Path Following
93 cm

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
1 - Topological Navigation
Closest Match
Current Image
Bird’s eye view

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
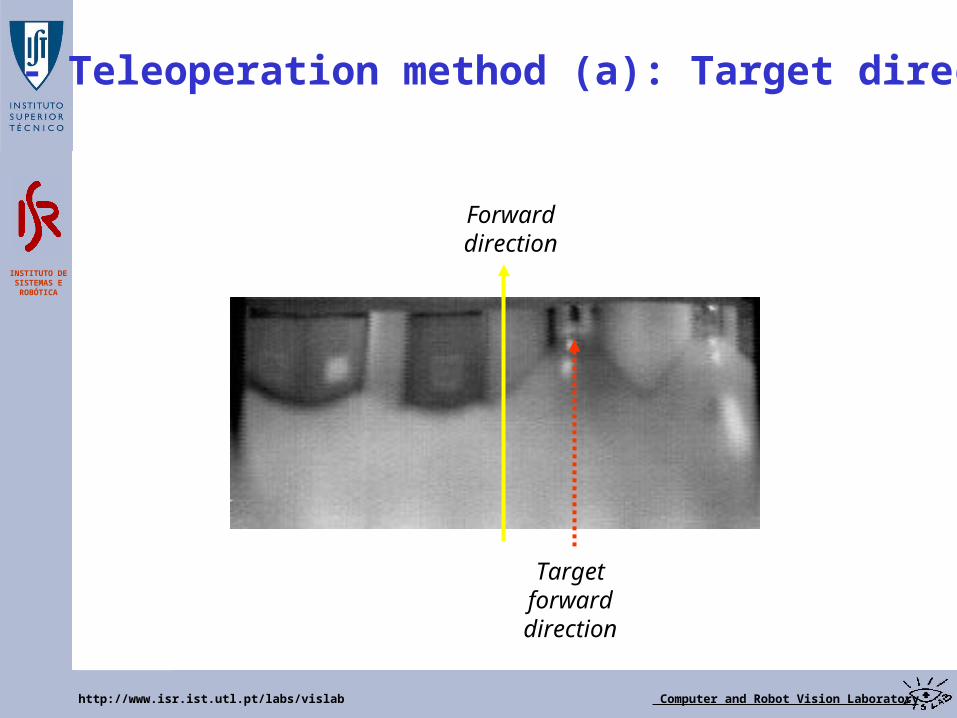
2 - Teleoperation method (a): Target direction
Targetforwarddirection
Forwarddirection
INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
Forwarddirection
Targetforwarddirection
2 - Teleoperation method (a): Target direction

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
Forwarddirection
Targetforwarddirection
2 - Teleoperation method (a): Target direction

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
Bird’s Eye View
Panoramic View
2 - Teleoperation method (b): Target position

INSTITUTO DESISTEMAS EROBÓTICA
http://www.isr.ist.utl.pt/labs/vislab Computer and Robot Vision Laboratory
3) Navigation: Visual Path Following





























