Embed Size (px)
DESCRIPTION
Induction Motor 2
Citation preview

Induction Motor II
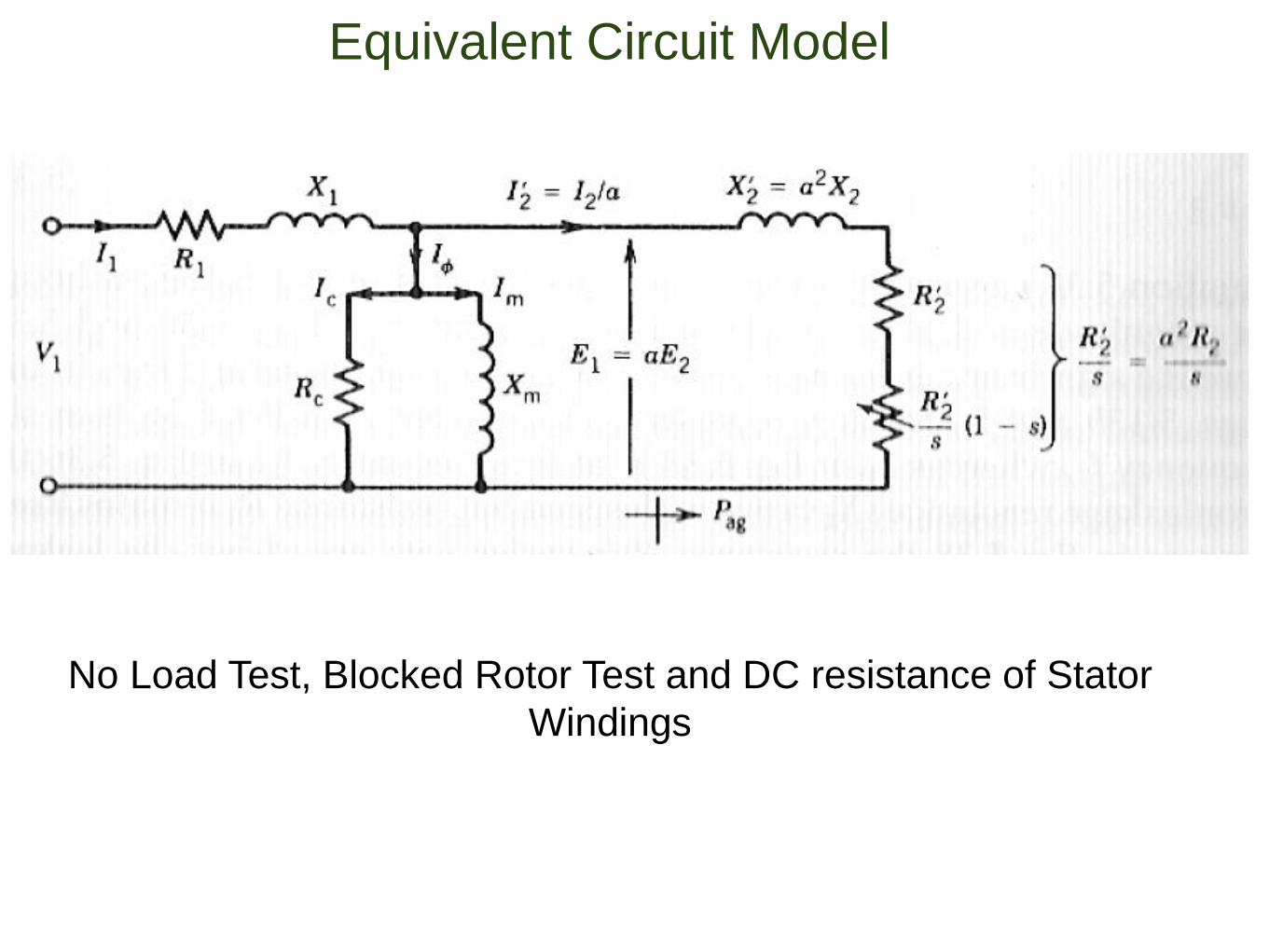
Equivalent Circuit Model
No Load Test, Blocked Rotor Test and DC resistance of Stator
Windings
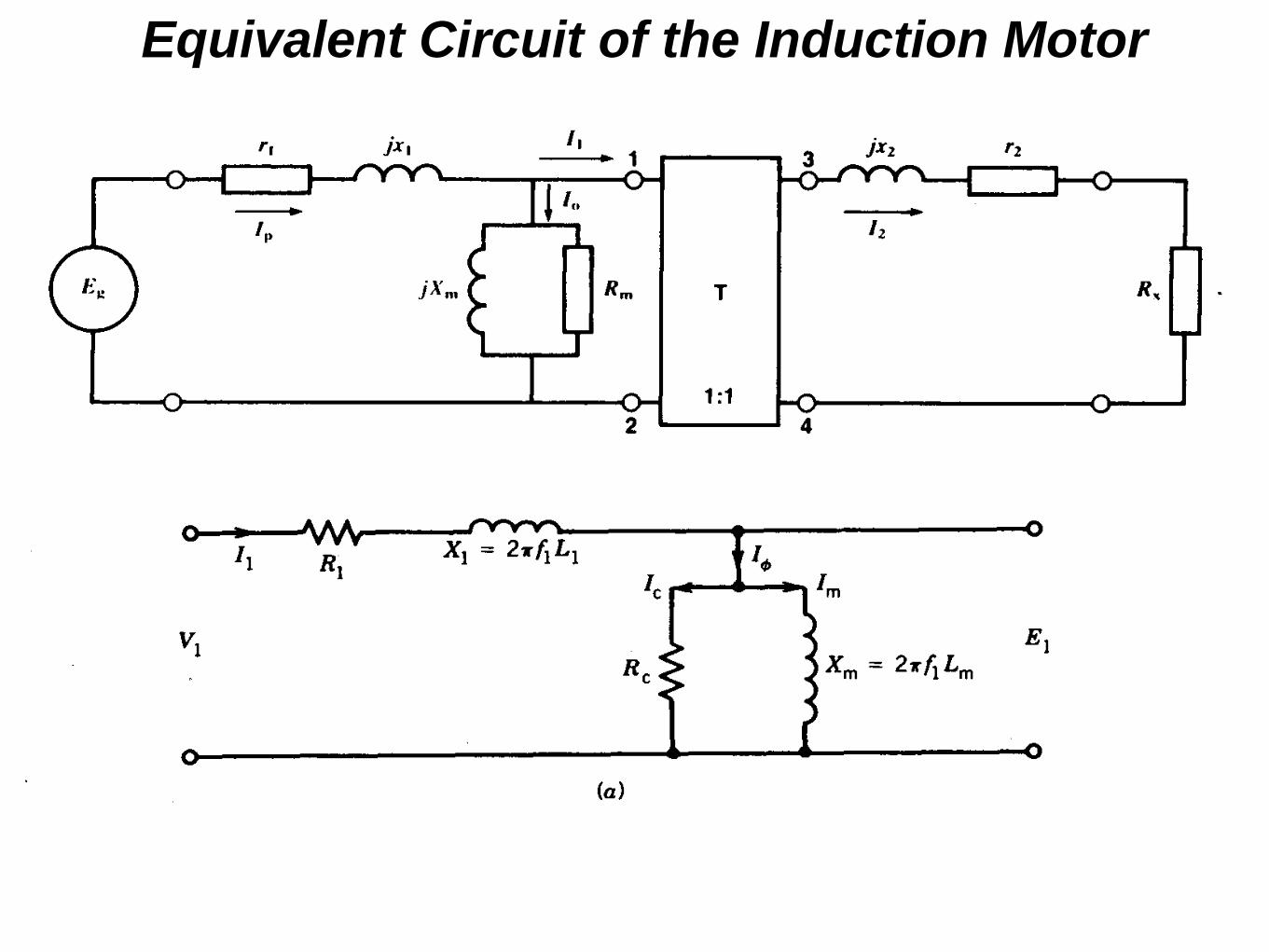
Equivalent Circuit of the Induction Motor
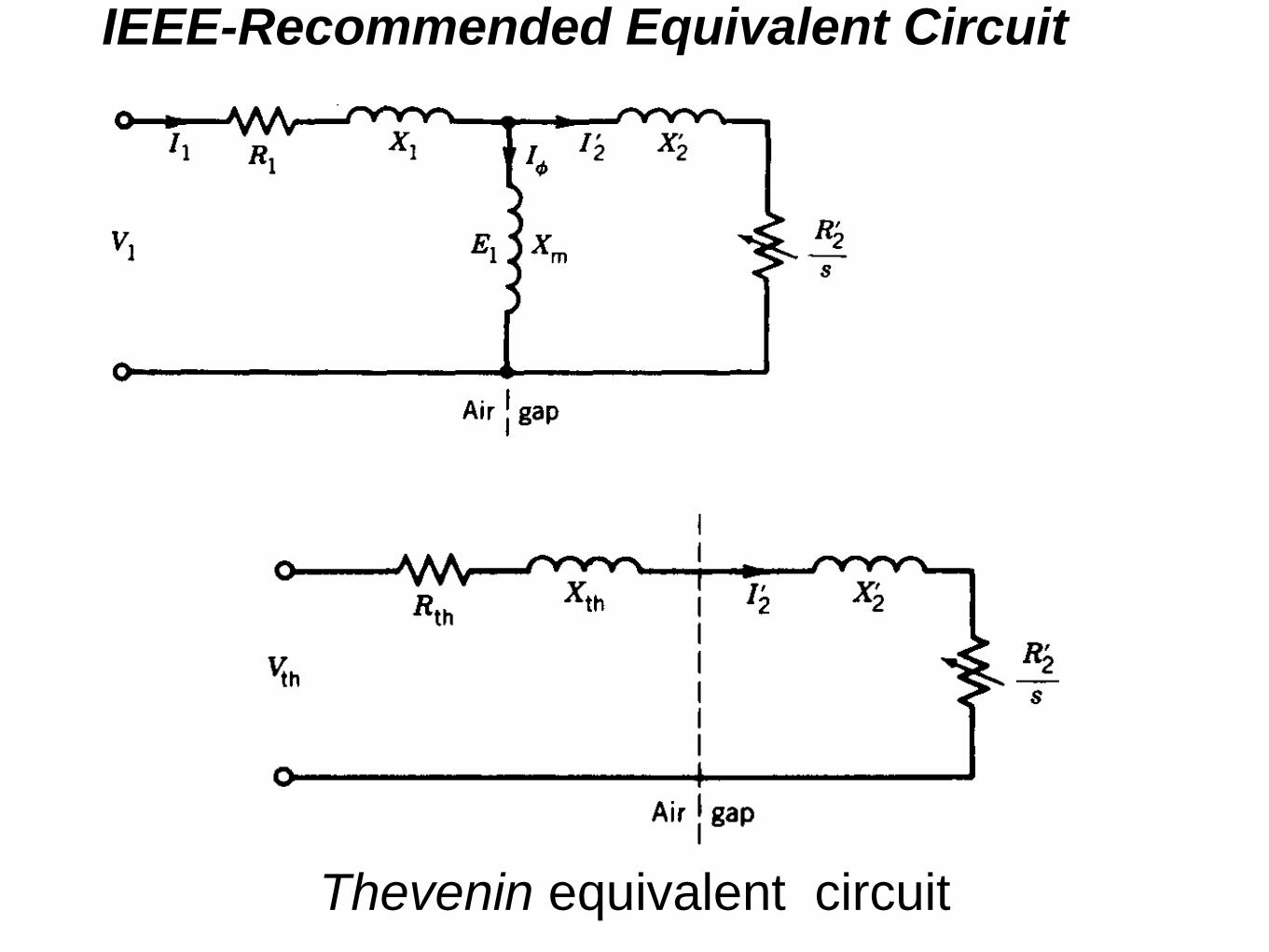
IEEE-Recommended Equivalent Circuit
Thevenin equivalent circuit
12
121
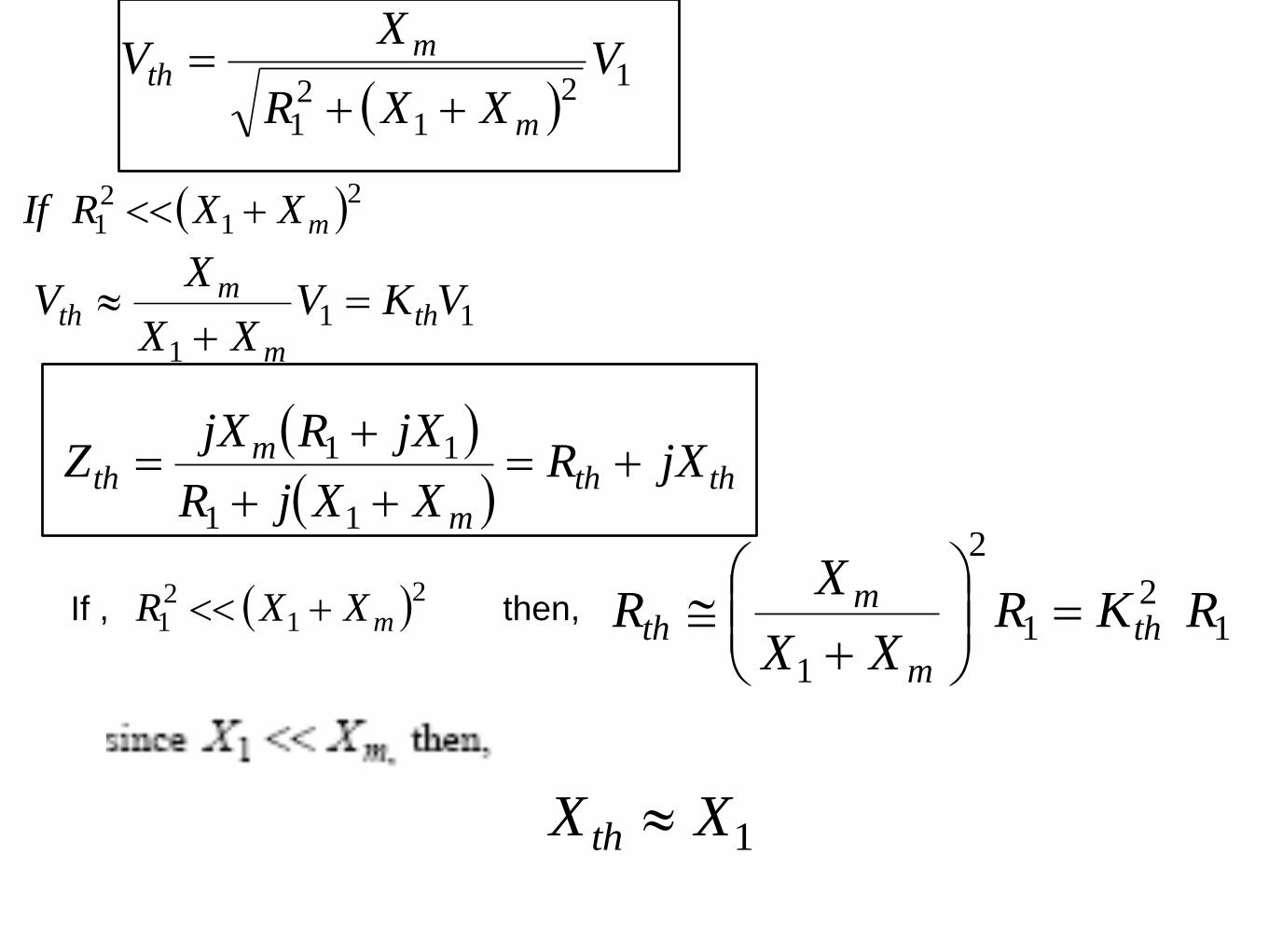
VXXR
XV
m
mth
2121 mXXRIf
11
1
VKVXX
XV th
m
mth
thth
m
mth jXR
XXjR
jXRjXZ
11
11
If , then, 2121 mXXR
12
1
2
1
RKRXX
XR th
m
mth
1XX th
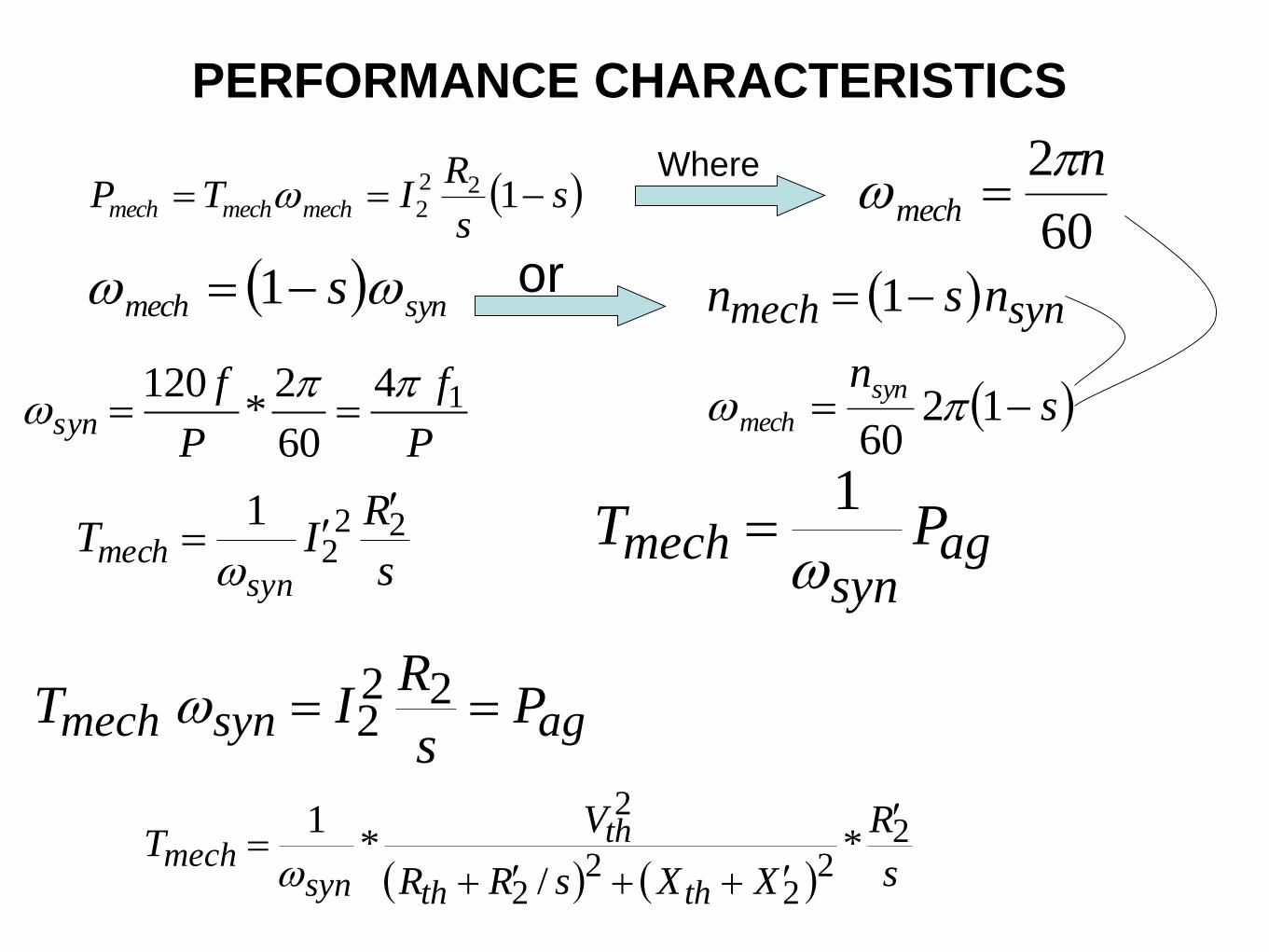
PERFORMANCE CHARACTERISTICS
s
RIT
synmech
222
1
s
R
XXsRR
VT
thth
th
synmech
22
22
2
2
*/
*1
ss
RITP mechmechmech 122
260
2 nmech
synmech s 1
snsyn
mech 1260
P
f
P
fsyn
14
60
2*
120
agsynmech Ps
RIT 222
agsyn
mech PT
1
Where
synmech nsn 1or
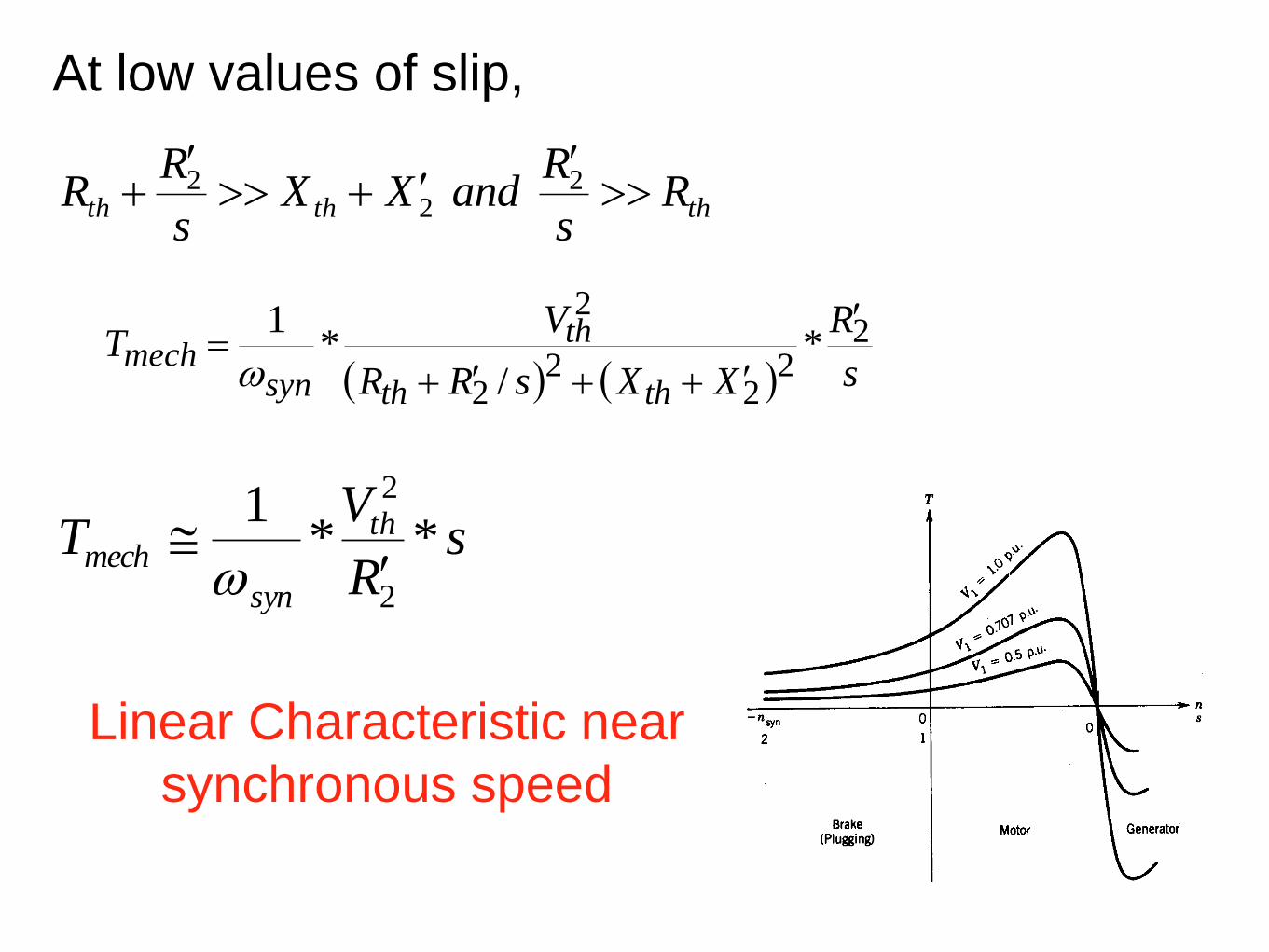
At low values of slip,
ththth Rs
RandXX
s
RR
2
22
sR
VT th
syn
mech **1
2
2
s
R
XXsRR
VT
thth
th
synmech
22
22
2
2
*/
*1
Linear Characteristic near
synchronous speed
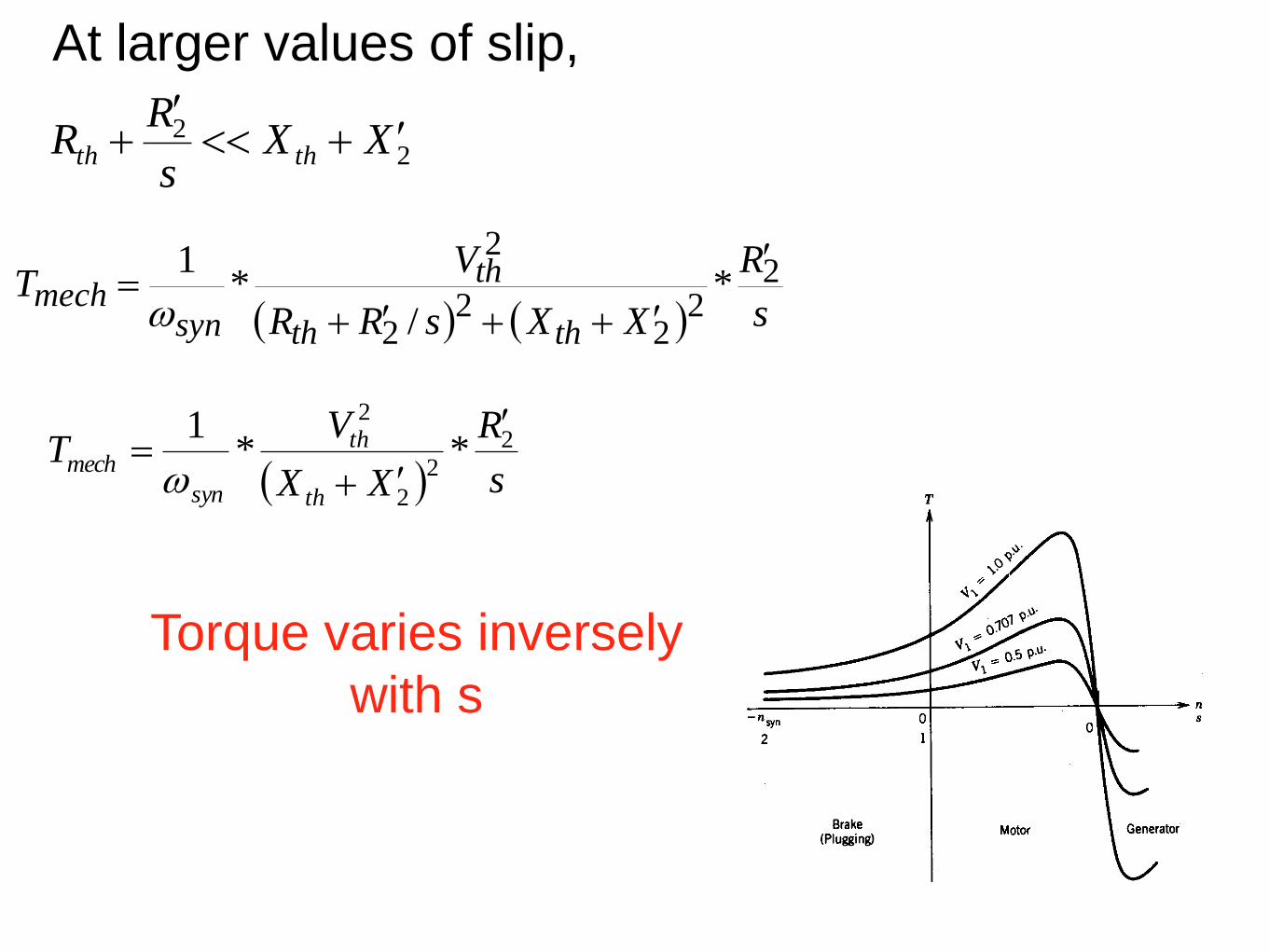
At larger values of slip,
22 XX
s
RR thth
s
R
XX
VT
th
th
syn
mech2
2
2
2
**1
s
R
XXsRR
VT
thth
th
synmech
22
22
2
2
*/
*1
Torque varies inversely
with s
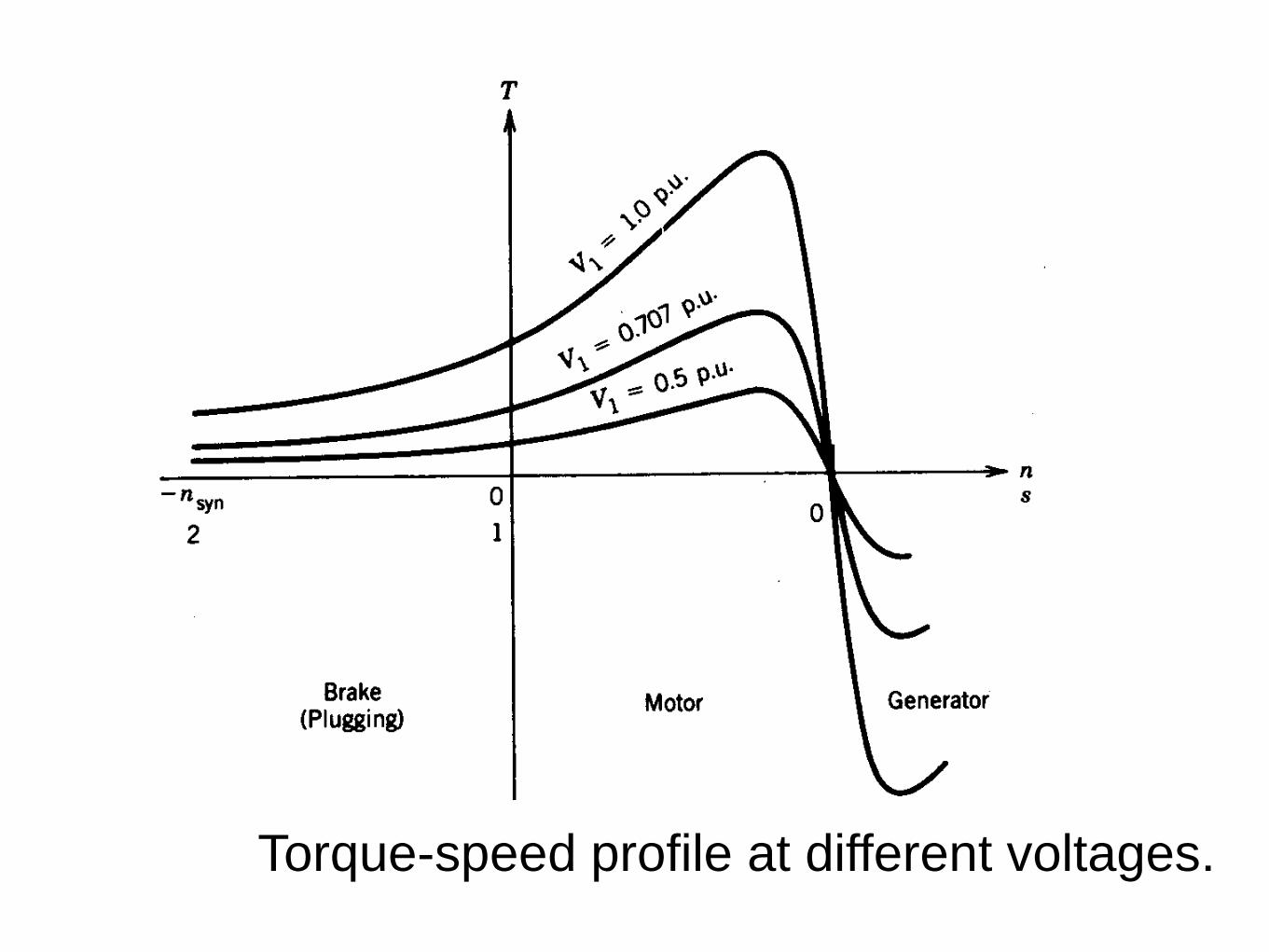
Torque-speed profile at different voltages.
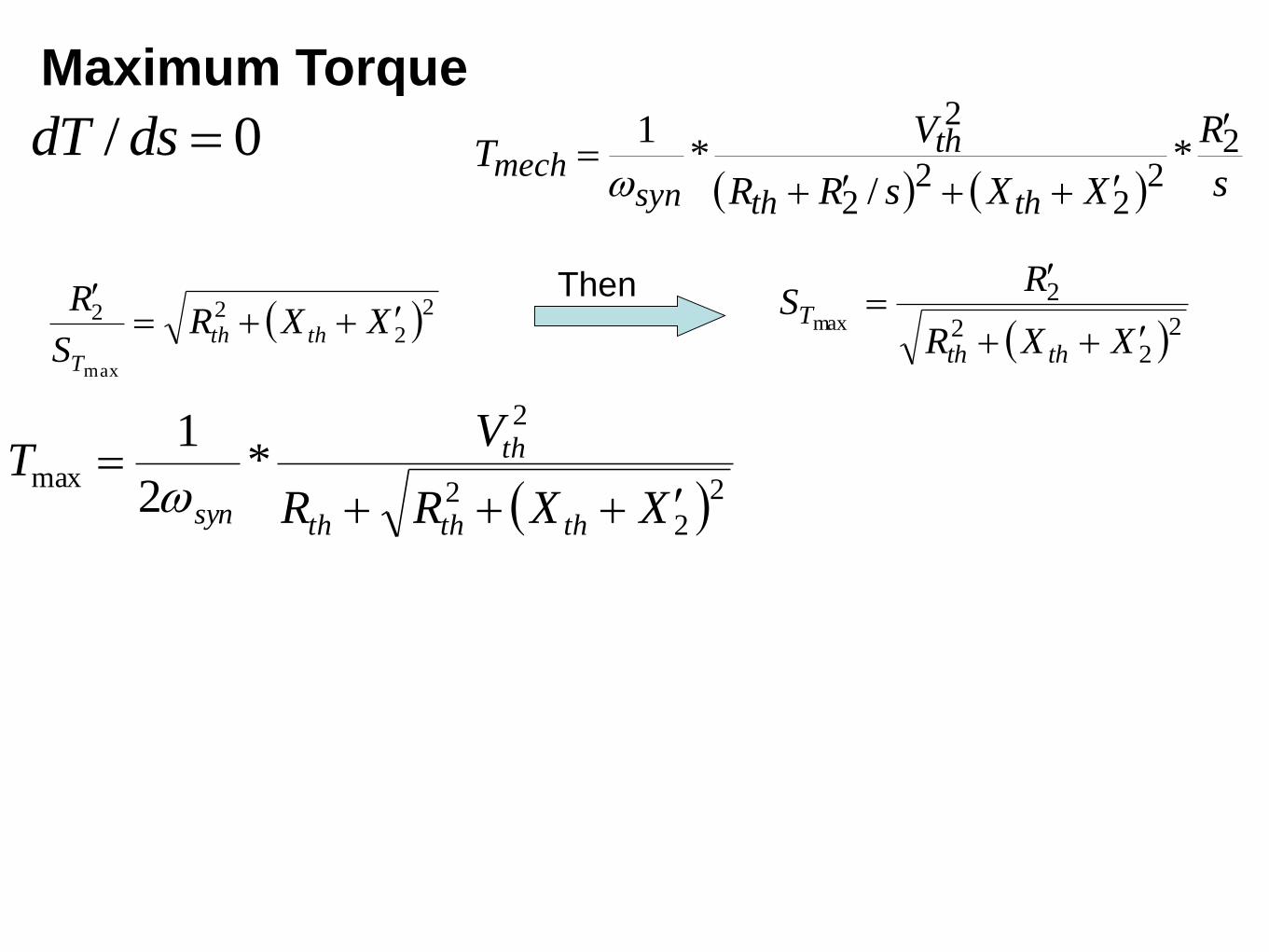
Maximum Torque
0/ dsdT
2222
max
XXRS
Rthth
T
s
R
XXsRR
VT
thth
th
synmech
22
22
2
2
*/
*1
222
2
maxXXR
RS
thth
T
Then
222
2
max *2
1
XXRR
VT
ththth
th
syn

Torque speed characteristics for varying2R
.
222
2
max *2
1
XXRR
VT
ththth
th
syn
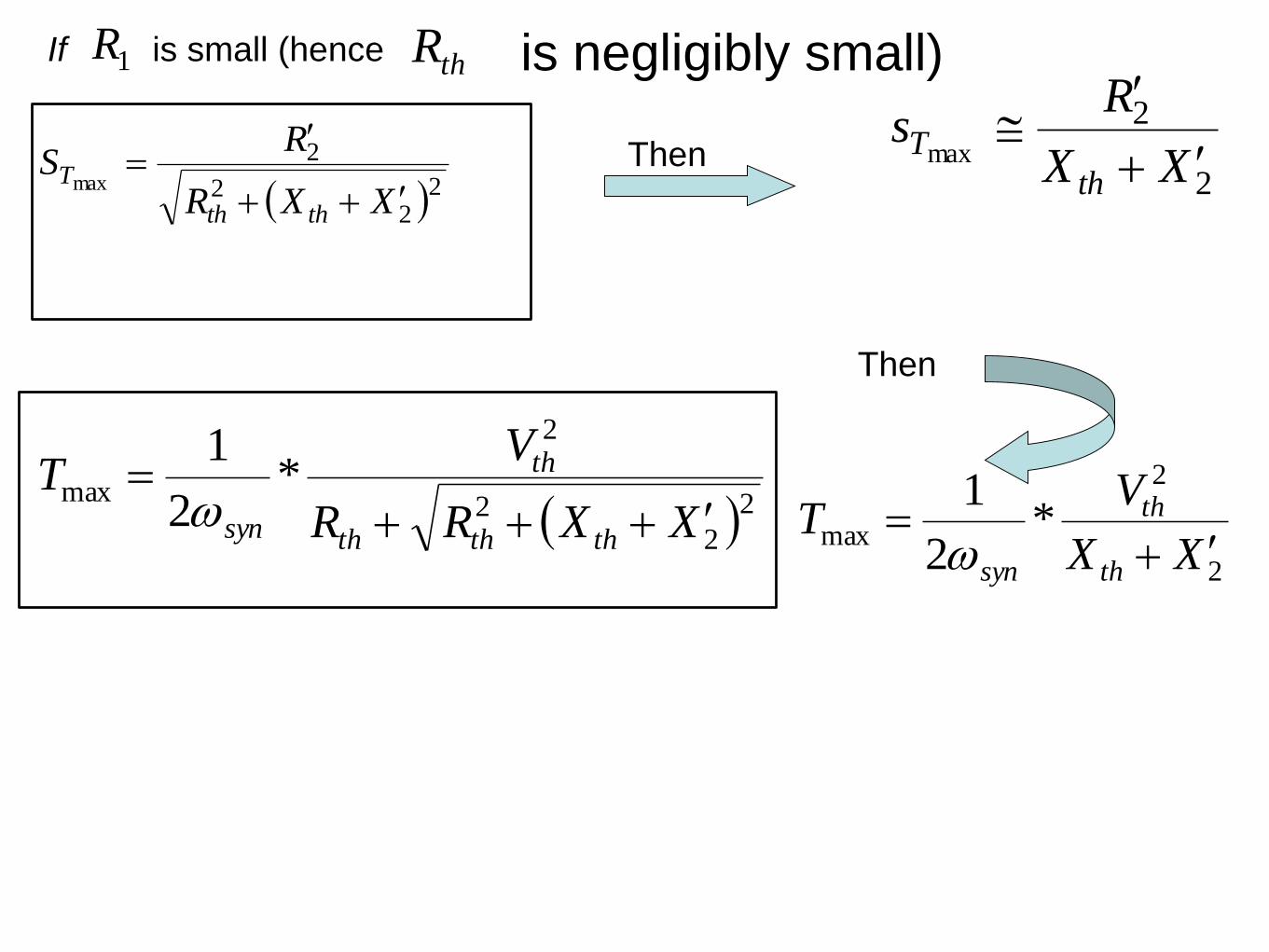
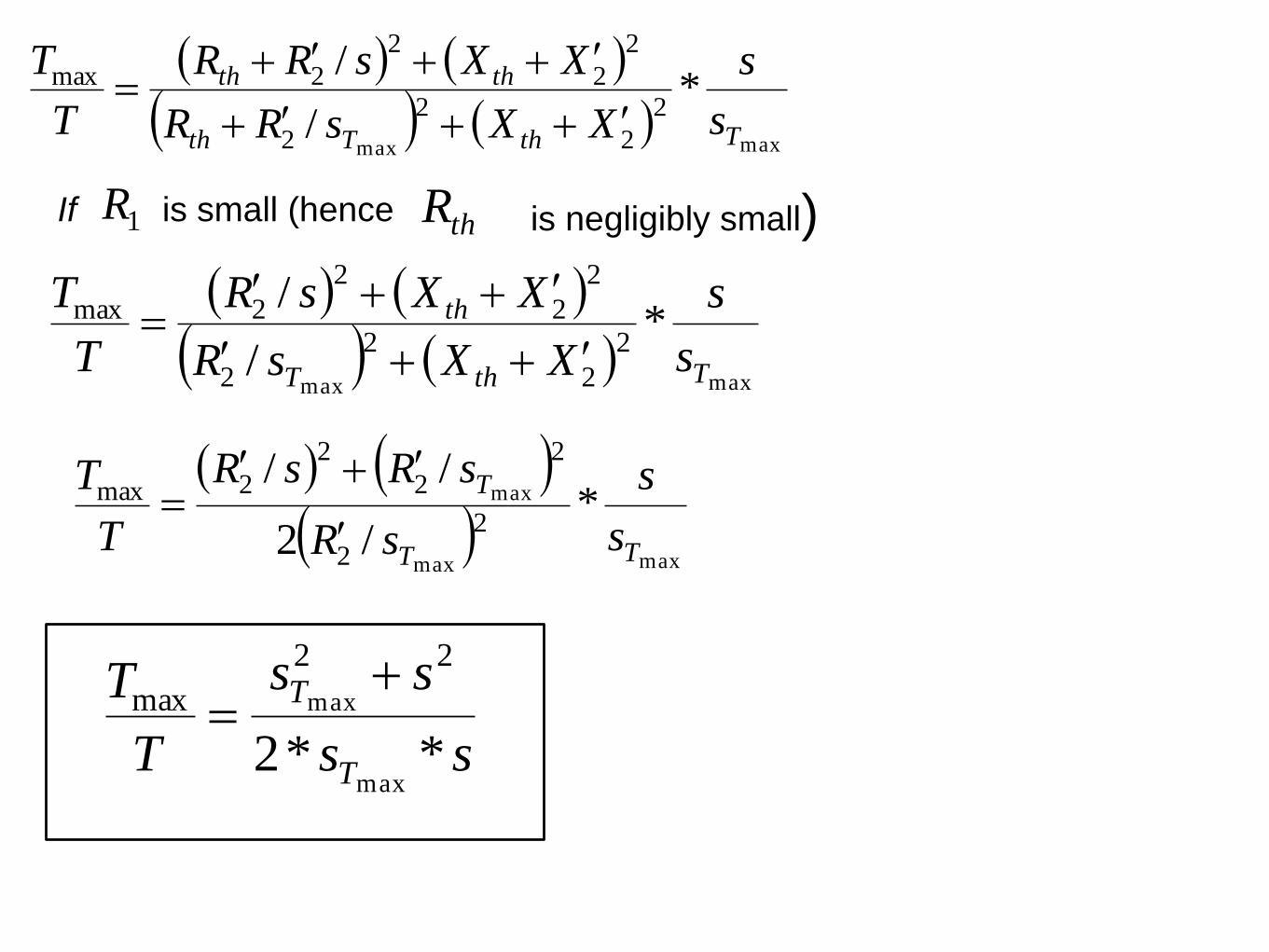
1RIf is small (hence thR is negligibly small)
222
2
maxXXR
RS
thth
T
222
2
max *2
1
XXRR
VT
ththth
th
syn
2
2
max XX
Rs
th
T
2
2
max *2
1
XX
VT
th
th
syn
Then
Then
maxmax
*/
/2
2
2
2
2
2
2
2max
TthTth
thth
s
s
XXsRR
XXsRR
T
T
1RIf is small (hence thR is negligibly small)
maxmax
*/
/2
2
2
2
2
2
2
2max
TthT
th
s
s
XXsR
XXsR
T
T
maxmax
max */2
//2
2
2
2
2
2max
TT
T
s
s
sR
sRsR
T
T
ss
ss
T
T
T
T
**2max
max
22
max
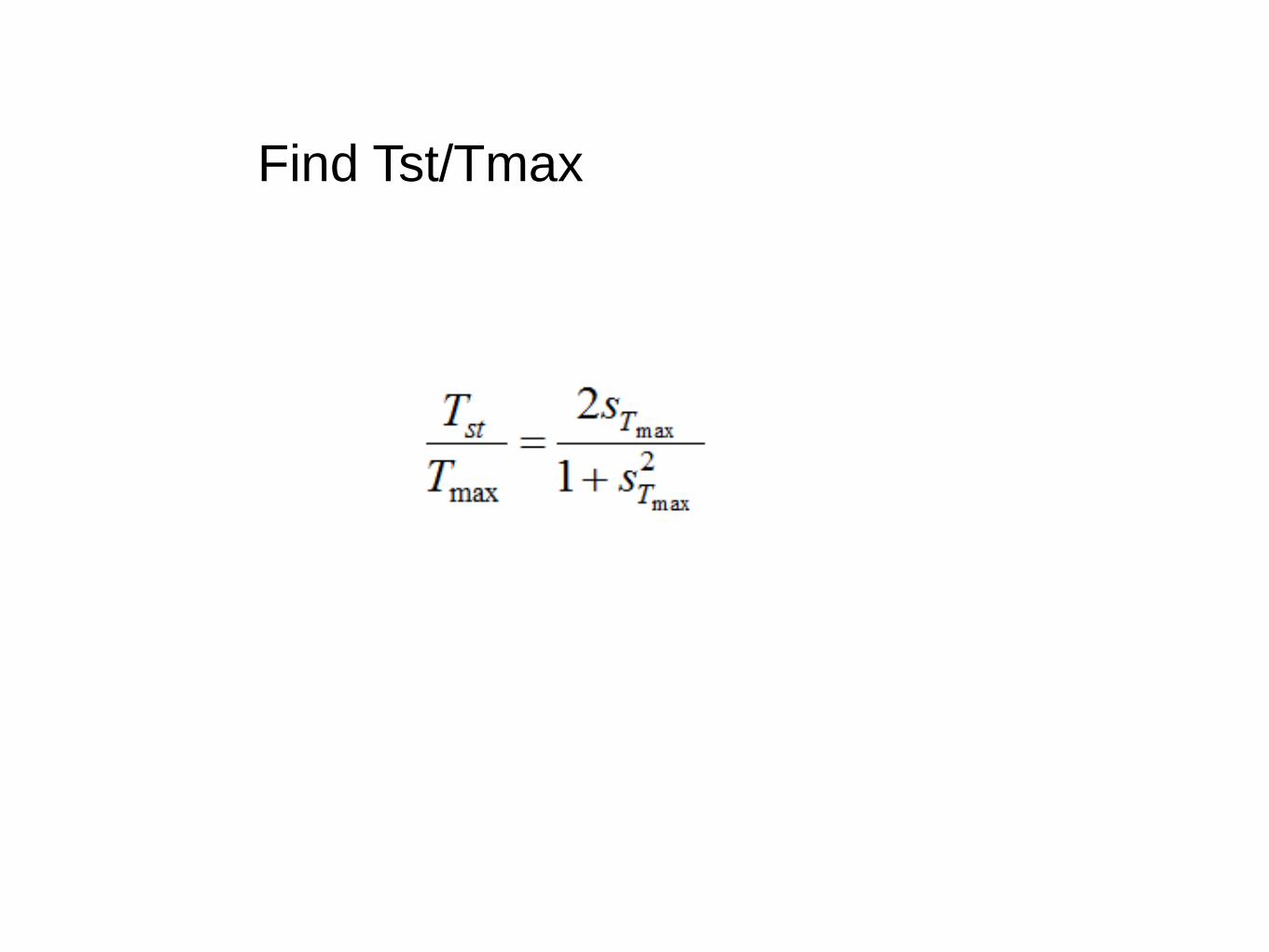
Find Tst/Tmax
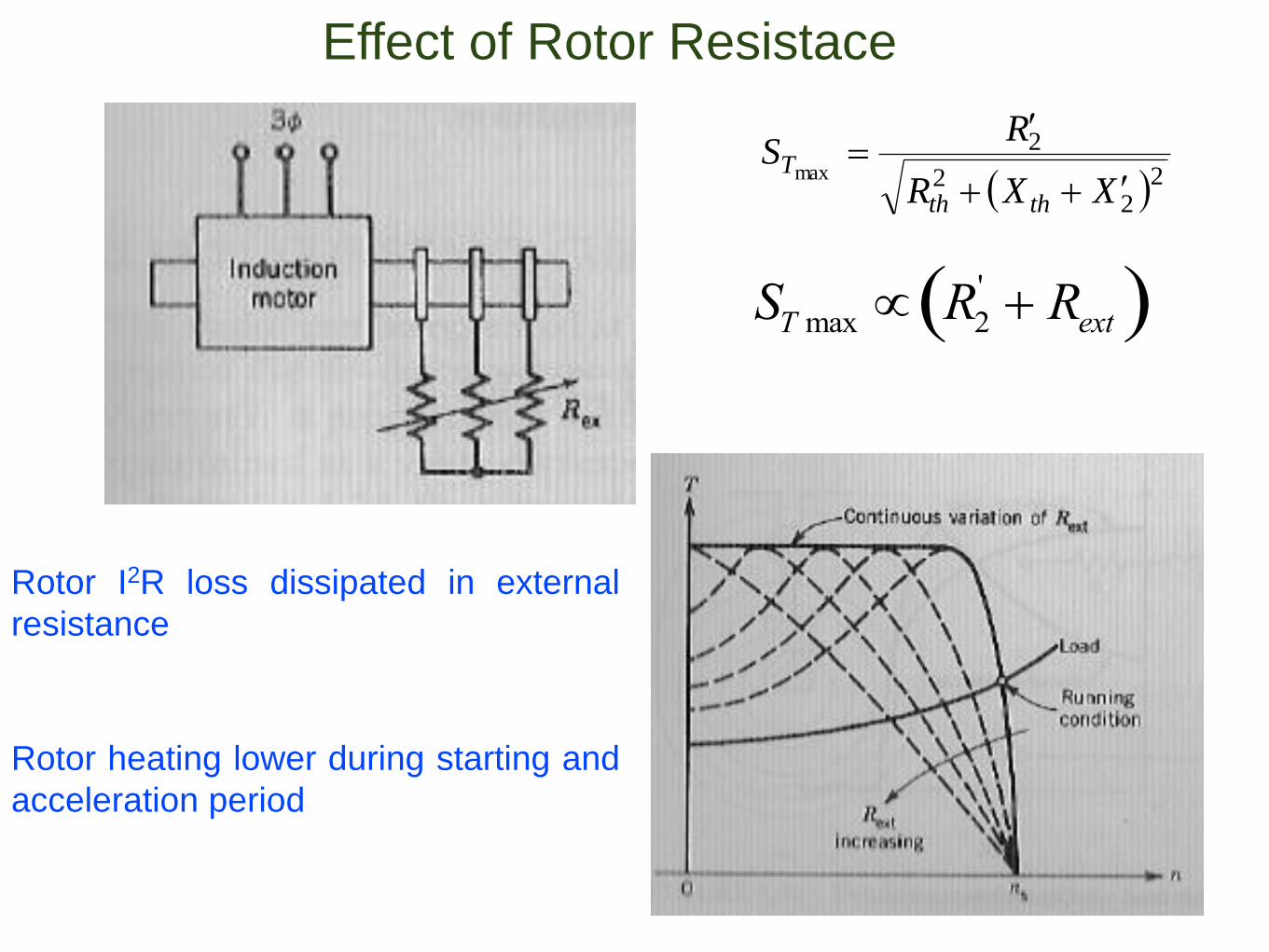
Effect of Rotor Resistace
ST max R2' Rext
Rotor I2R loss dissipated in external
resistance
Rotor heating lower during starting and
acceleration period
222
2
maxXXR
RS
thth
T
3
=163.11 N.m

%5.87100*4.32022
3.28022motor
(c) (i)
(c) (ii)
A three-phase, 460 V, 60 Hz, six-pole wound-rotor induction motor
drives a constant load of 100 N - m at a speed of 1140 rpm when
the rotor terminals are short-circuited. It is required to reduce the
speed of the motor to 1000 rpm by inserting resistances in the
rotor circuit. Determine the value of the resistance if the rotor
winding resistance per phase is 0.2 ohms. Neglect rotational
losses. The stator-to-rotor turns ratio is unity.

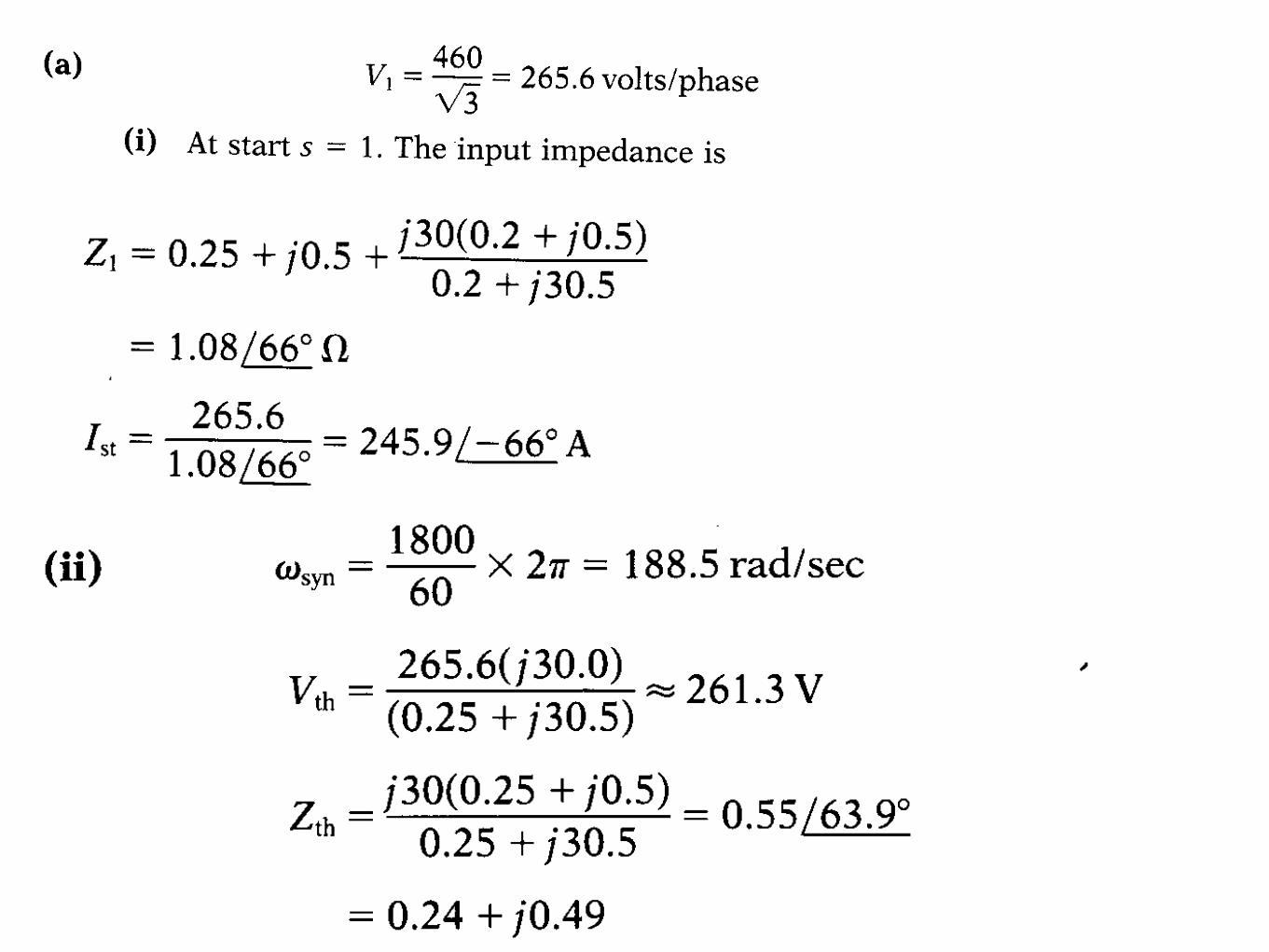
Example A three phase, 460 V 1450 rpm, 50 Hz, four pole
wound rotor induction motor has the following parameters per
phase ( 1R =0.2, 2R=0.18 , 21 XX =0.2, mX =40). The
rotational losses are 1500 W. Find,
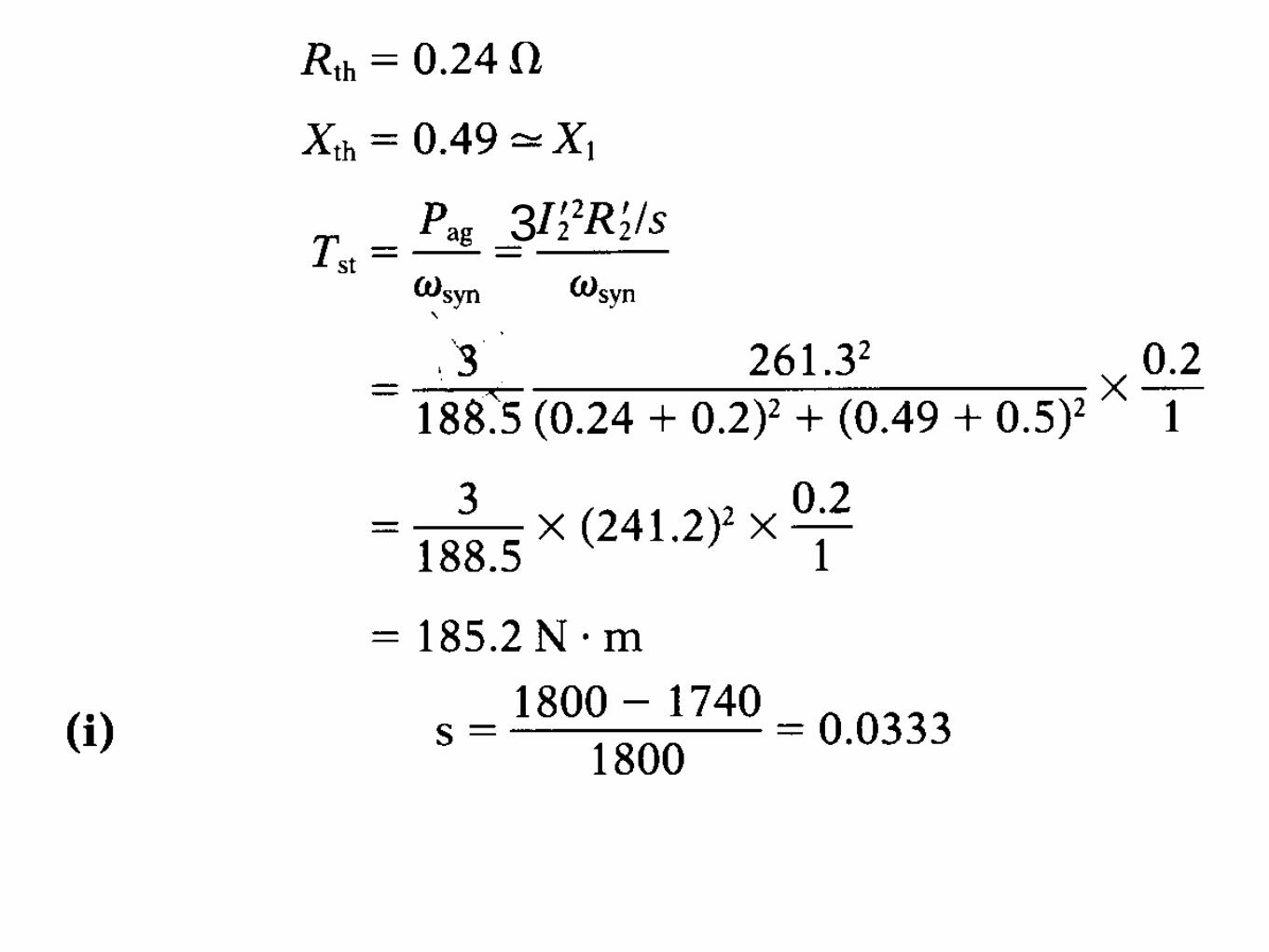
(a) Starting current when started direct on full load voltage.
Also find starting torque.
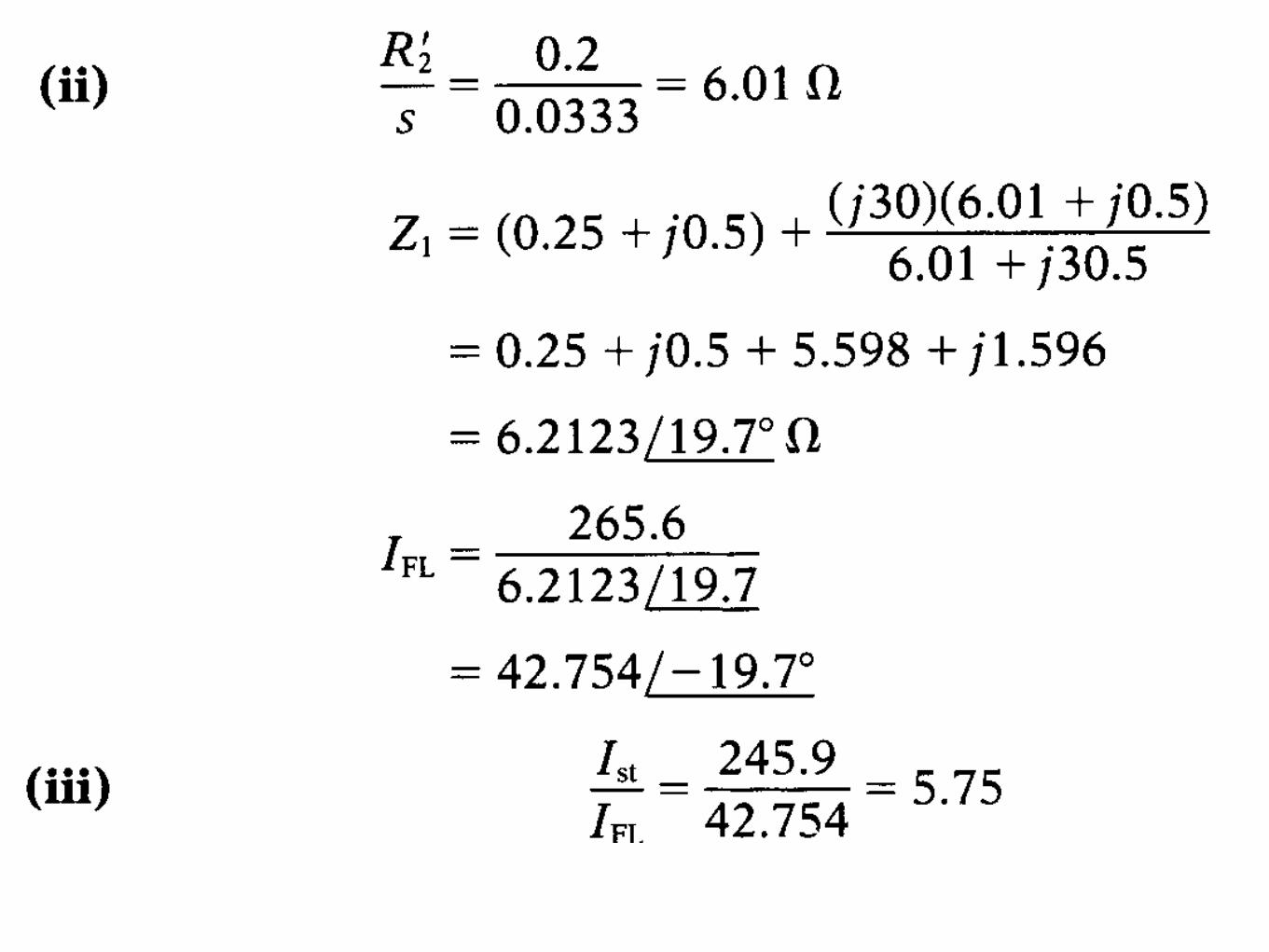
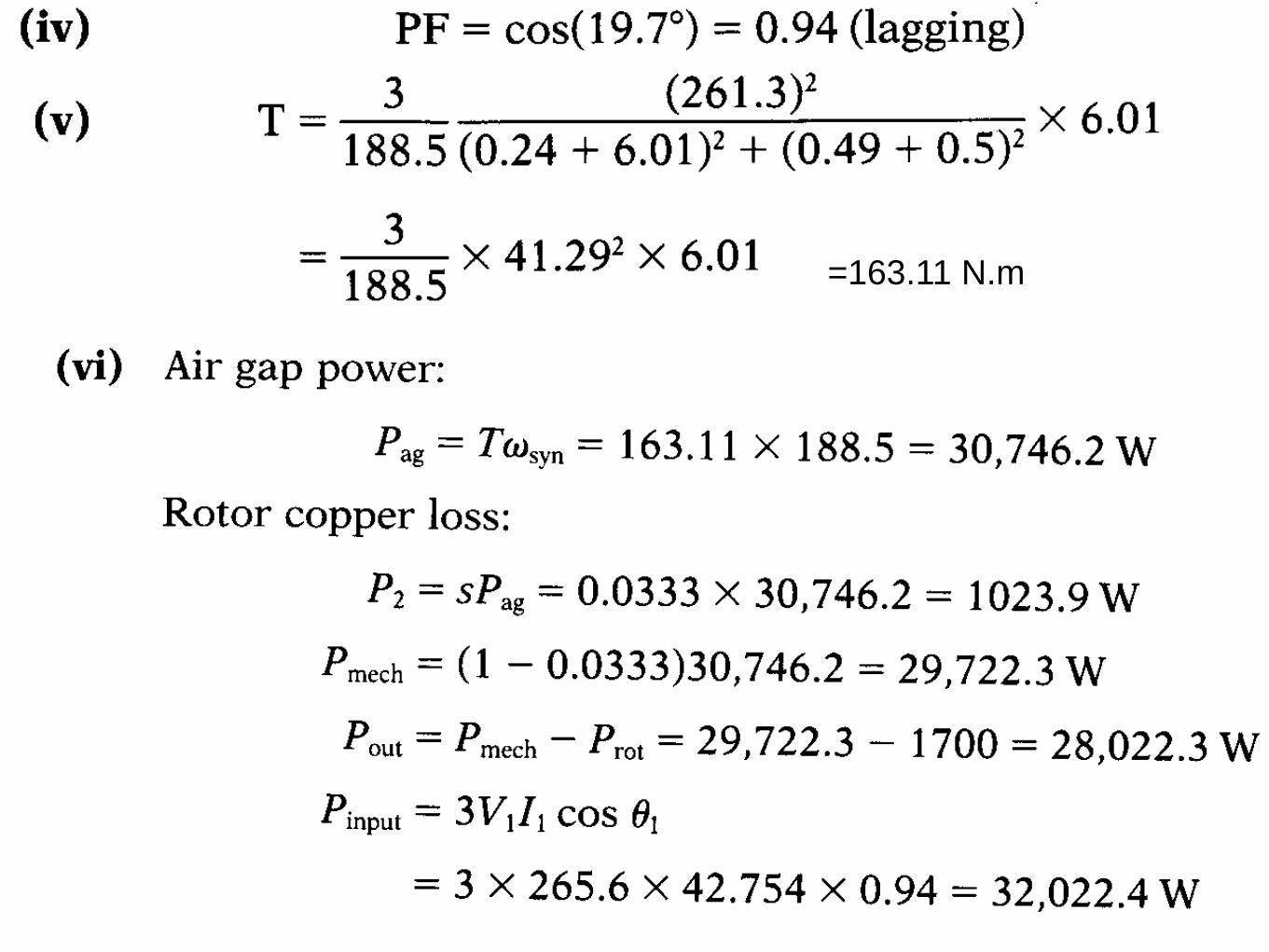
(b) (b) Slip, current, power factor, load torque and efficiency
at full load conditions.
(c) Maximum torque and slip at which maximum torque will
be developed.
(d) How much external resistance per phase should be
connected in the rotor circuit so that maximum torque
occurs at start?

phaseVV /6.2653
4601
o
j
jjZ 59.4655.0
2.4018.0
2.018.0*402.02.01
o
ostI
VI 3.4691.482
59.4655.0
6.265
1
1
0333.01500
14501500
s
4.50333.0
18.02
s
R
o
j
jjjZ 83.10959.4
4.454.5
2.04.5*402.02.01

AI o
oFL83.1056.53
83.10959.4
6.2651
Then the power factor is: 9822.083.10cos o lag.
.sec/08.1572*60
1500radsys
Vj
jV o
th 285.0275.2642.402.0
40*6.265
Then,
2.0198.0285.45281432.0
2.402.0
2.02.0*40j
j
jjZ o
th
NmT 68.228
2.02.04.5198.0*08.157
4.5*275.264*322
2
Then, WTP sysag 1.3592108.157*68.228*
Then, WsPP ag 11971.35921*0333.02
And, WPsP agm 7.347231
Then, WPPP rotmout 7.3322315007.34723
WPin 419179822.0*56.53*6.265*3
Then, %26.7941914
7.33223
in
out
P
P
NmTm 56.862
2.02.0198.0198.05.188*2
275.264*32/122
2
4033.0
2.02.0198.0
18.02/122max
Ts
(d)
2/122
2
2.02.0198.01
max
ext
T
RRs
Then, 446323.02 extRR
Then, 26632.018.0446323.0 extR
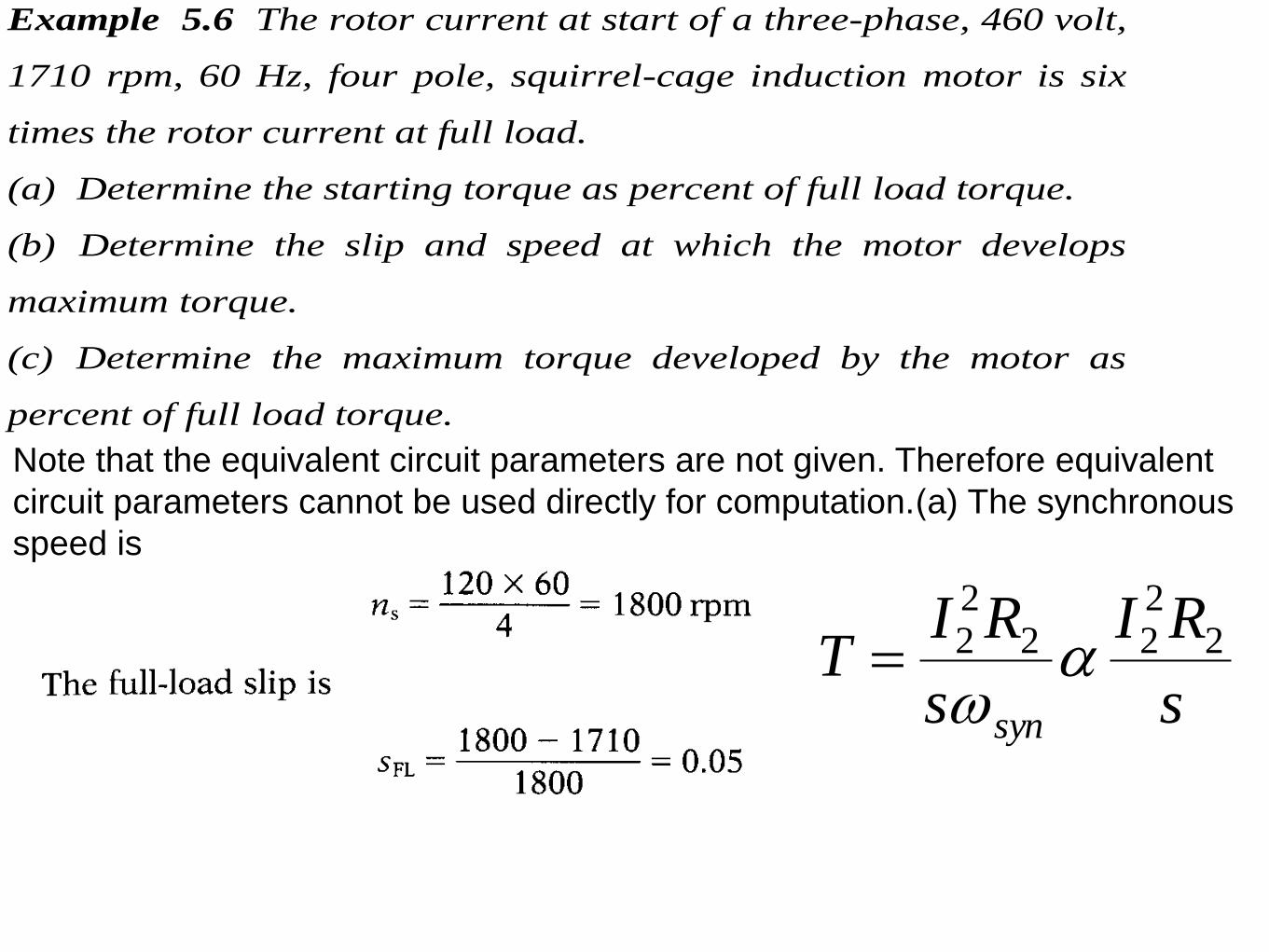
Example 5.6 The rotor current at start of a three-phase, 460 volt,
1710 rpm, 60 Hz, four pole, squirrel-cage induction motor is six
times the rotor current at full load.
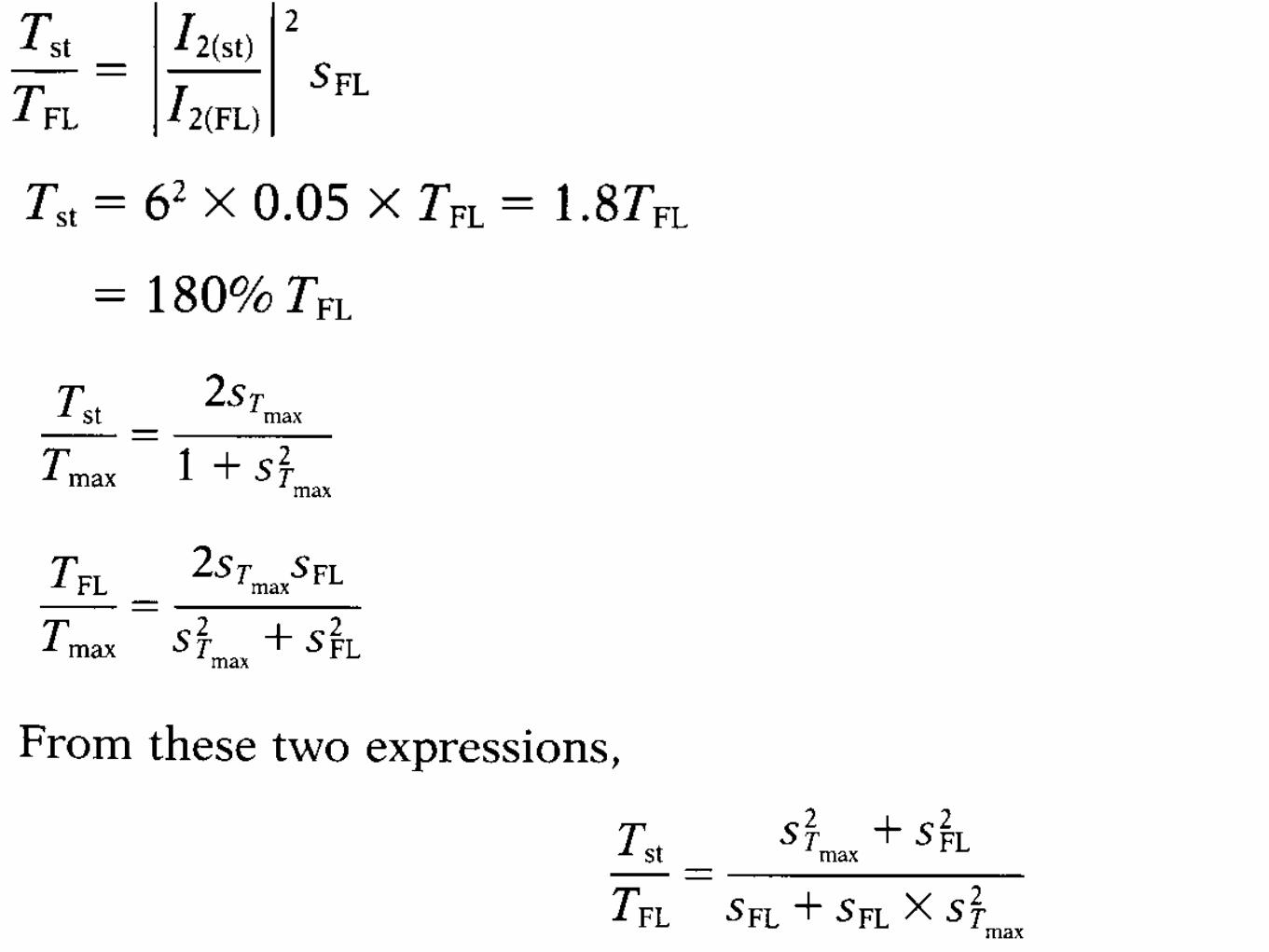
(a) Determine the starting torque as percent of full load torque.
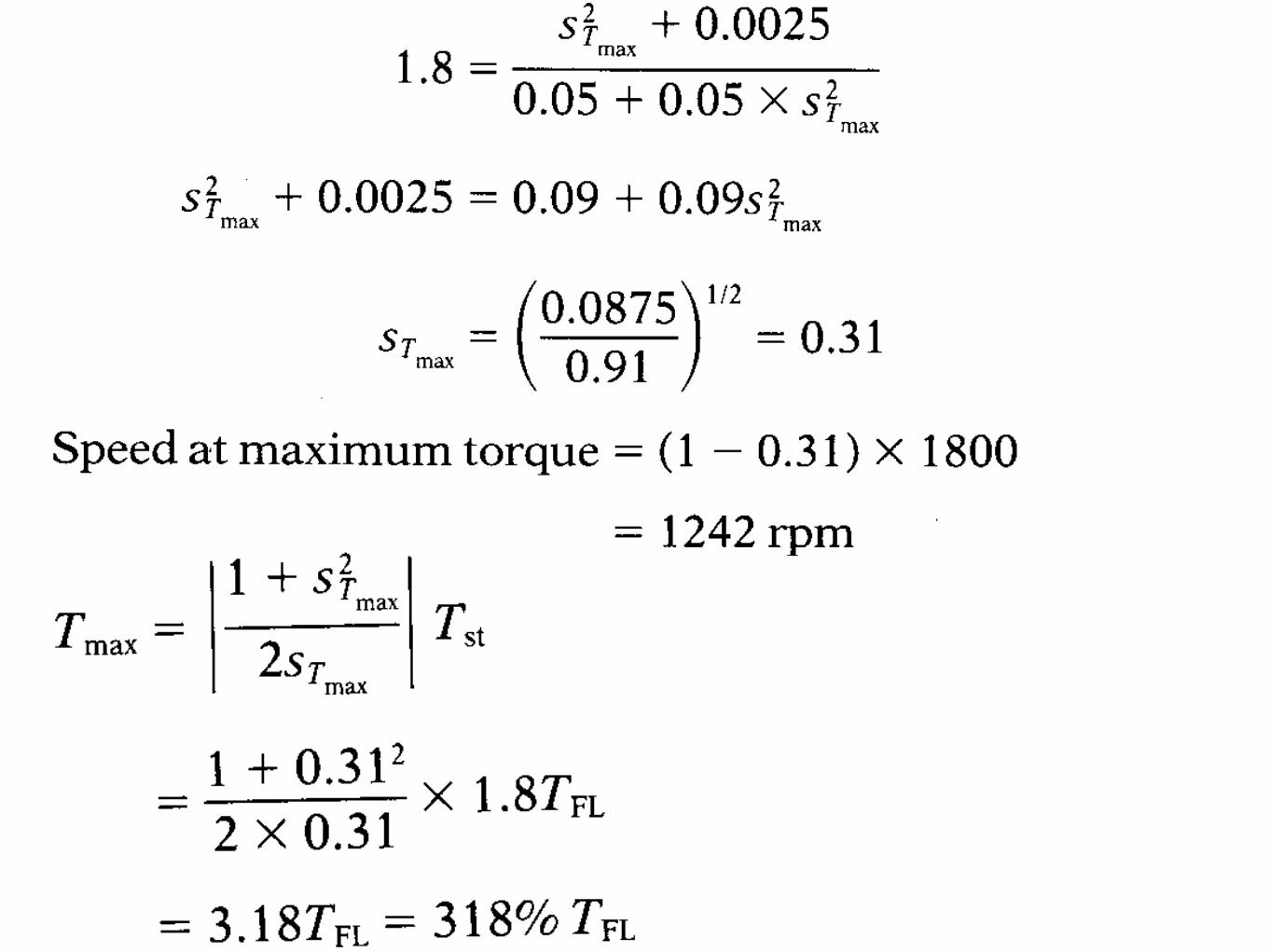
(b) Determine the slip and speed at which the motor develops
maximum torque.
(c) Determine the maximum torque developed by the motor as
percent of full load torque.
Note that the equivalent circuit parameters are not given. Therefore equivalent
circuit parameters cannot be used directly for computation.)a) The synchronous
speed is
s
RI
s
RIT
syn
2222
22
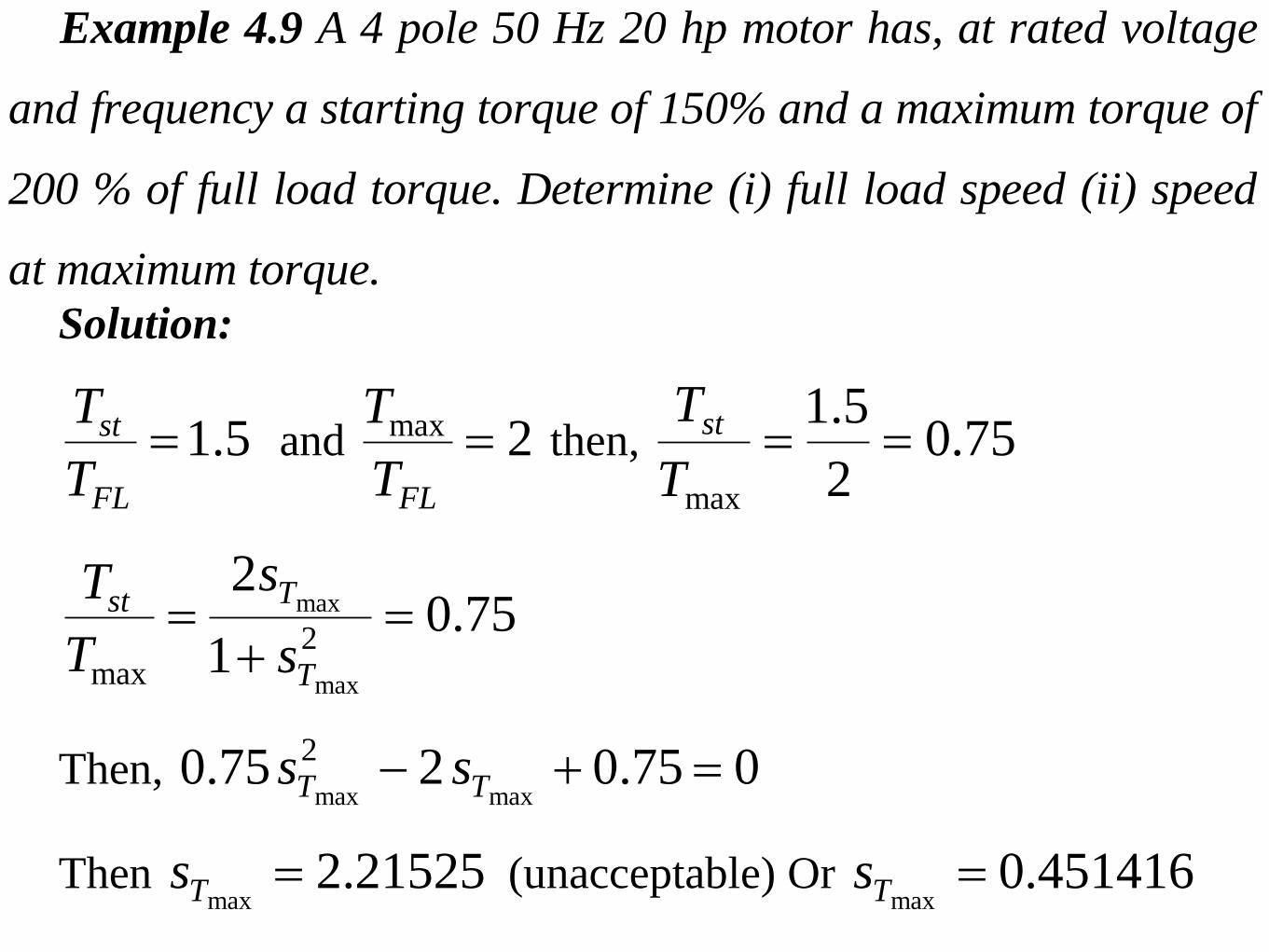
Example 4.9 A 4 pole 50 Hz 20 hp motor has, at rated voltage
and frequency a starting torque of 150% and a maximum torque of
200 % of full load torque. Determine (i) full load speed (ii) speed
at maximum torque.
Solution:
5.1FL
st
T
T and 2max
FLT
T then, 75.0
2
5.1
max
T
Tst
75.01
22
max max
max
T
Tst
s
s
T
T
Then, 075.0275.0maxmax
2 TT ss
Then 21525.2max
Ts (unacceptable) Or 451416.0max
Ts
2*2
max
max
22
max
FLT
FLT
FL ss
ss
T
T
But 451416.0max
Ts
Then 2*451416.0*2
451416.0 22max
FL
FL
FL s
s
T
T
0451416.0451416.0*4 22 FLFL ss
0203777.080566.12 FLFL ss
6847.1FLs (unacceptable) or 120957.0FLs
rpmns 15004
50*120
then (a) sFLFL nsn *1
rpmnFL 13191500*120957.01
(b) rpmnsn sTT 8231500*451416.01*1maxmax
Example 4.10 A 3, 280 V, 60 Hz, 20 hp, four-pole induction
motor has the following equivalent circuit parameters.
12.01 R , 1.02 R , 25.021 XX , and 10mX
The rotational loss is 400 W. For 5% slip, determine (a) The
motor speed in rpm and radians per sec. (b) The motor current. (c)
The stator cu-loss. (d) The air gap power. (e) The rotor cu-loss. (f)
The shaft power. (g) The developed torque and the shaft torque.
(h) The efficiency.
rpmns 18004
60*120 , sec/5.1882*
60
1800rads
Solution:
0.12 j0.25
j10
j0.25
205.0
1.0
ee XRjZ 25.012.01
o
j
jjjZ 55.231314.2
25.102
25.02*1025.012.01
1.120
3
2081 V V
o
oI 55.231314.2
55.231314.2
1.1201
A
(c) WP 031.114312.0*3479.56*3 21
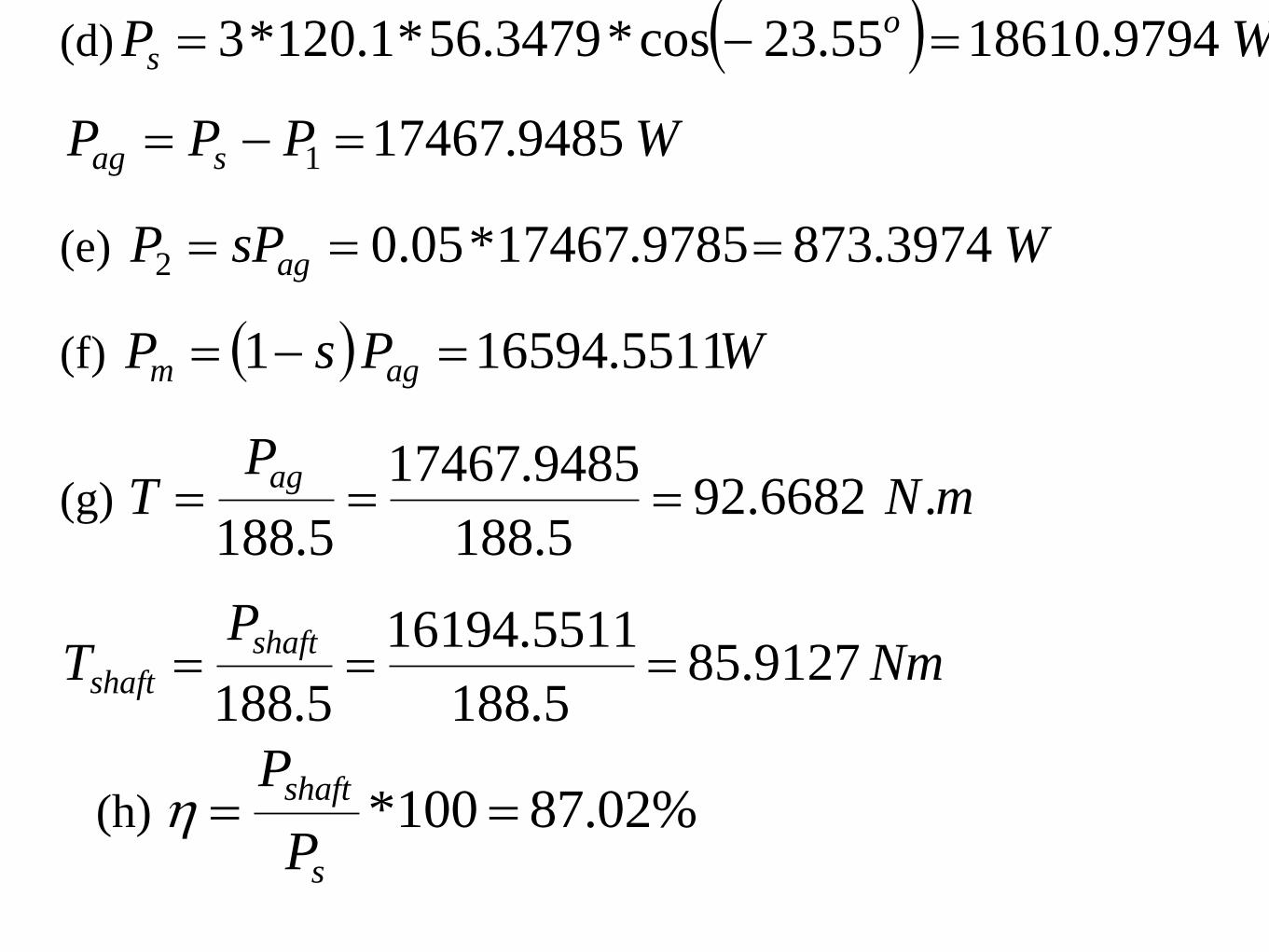
(d) WP os 9794.1861055.23cos*3479.56*1.120*3
WPPP sag 9485.174671
(e) WsPP ag 3974.8739785.17467*05.02
(f) WPsP agm 5511.165941
(g) mNP
Tag
.6682.925.188
9485.17467
5.188
NmP
Tshaft
shaft 9127.855.188
5511.16194
5.188
(h) %02.87100* s
shaft
P
P
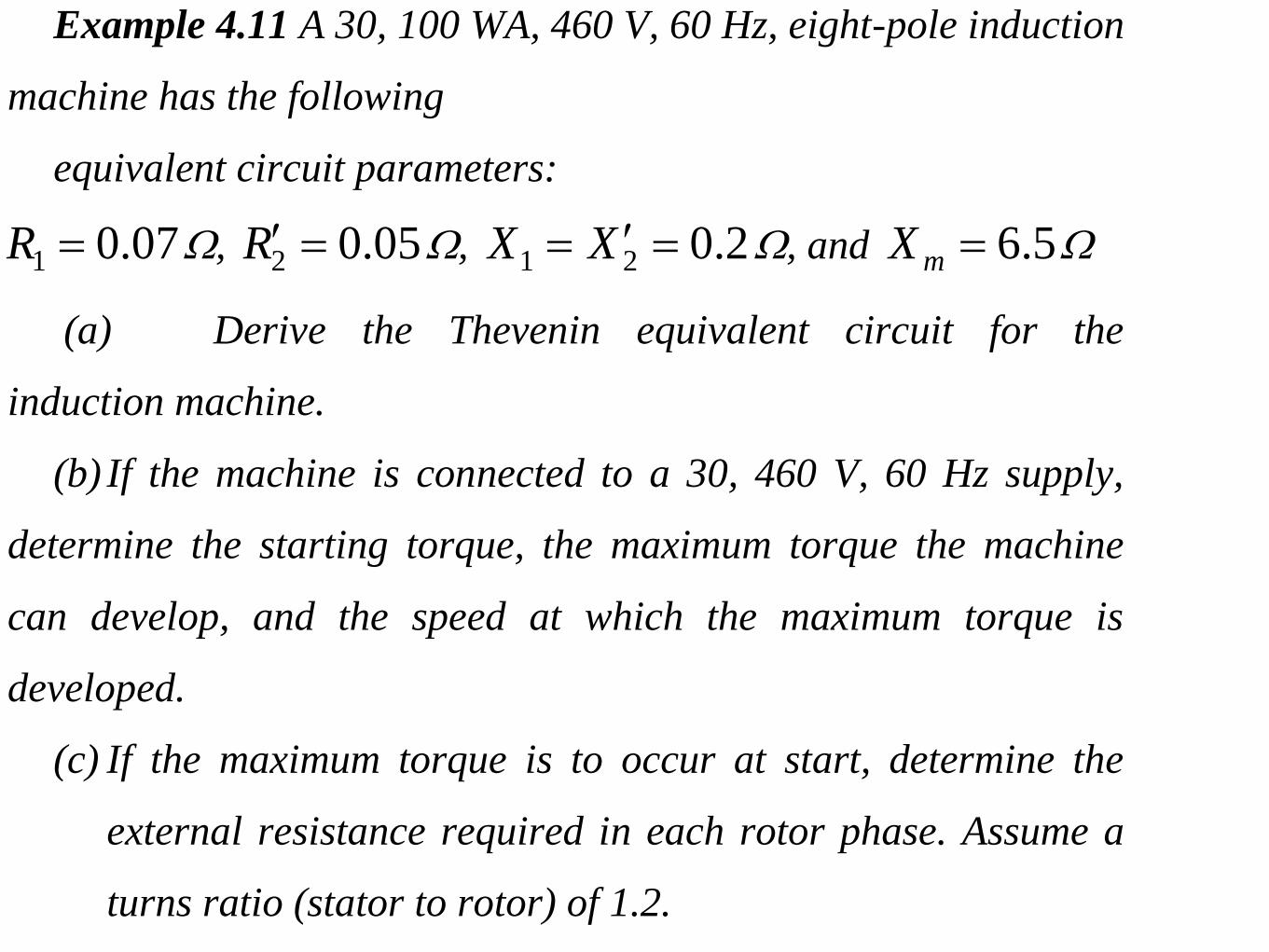
Example 4.11 A 30, 100 WA, 460 V, 60 Hz, eight-pole induction
machine has the following
equivalent circuit parameters:
07.01 R , 05.02 R , 2.021 XX , and 5.6mX
(a) Derive the Thevenin equivalent circuit for the
induction machine.
(b) If the machine is connected to a 30, 460 V, 60 Hz supply,
determine the starting torque, the maximum torque the machine
can develop, and the speed at which the maximum torque is
developed.
(c) If the maximum torque is to occur at start, determine the
external resistance required in each rotor phase. Assume a
turns ratio (stator to rotor) of 1.2.
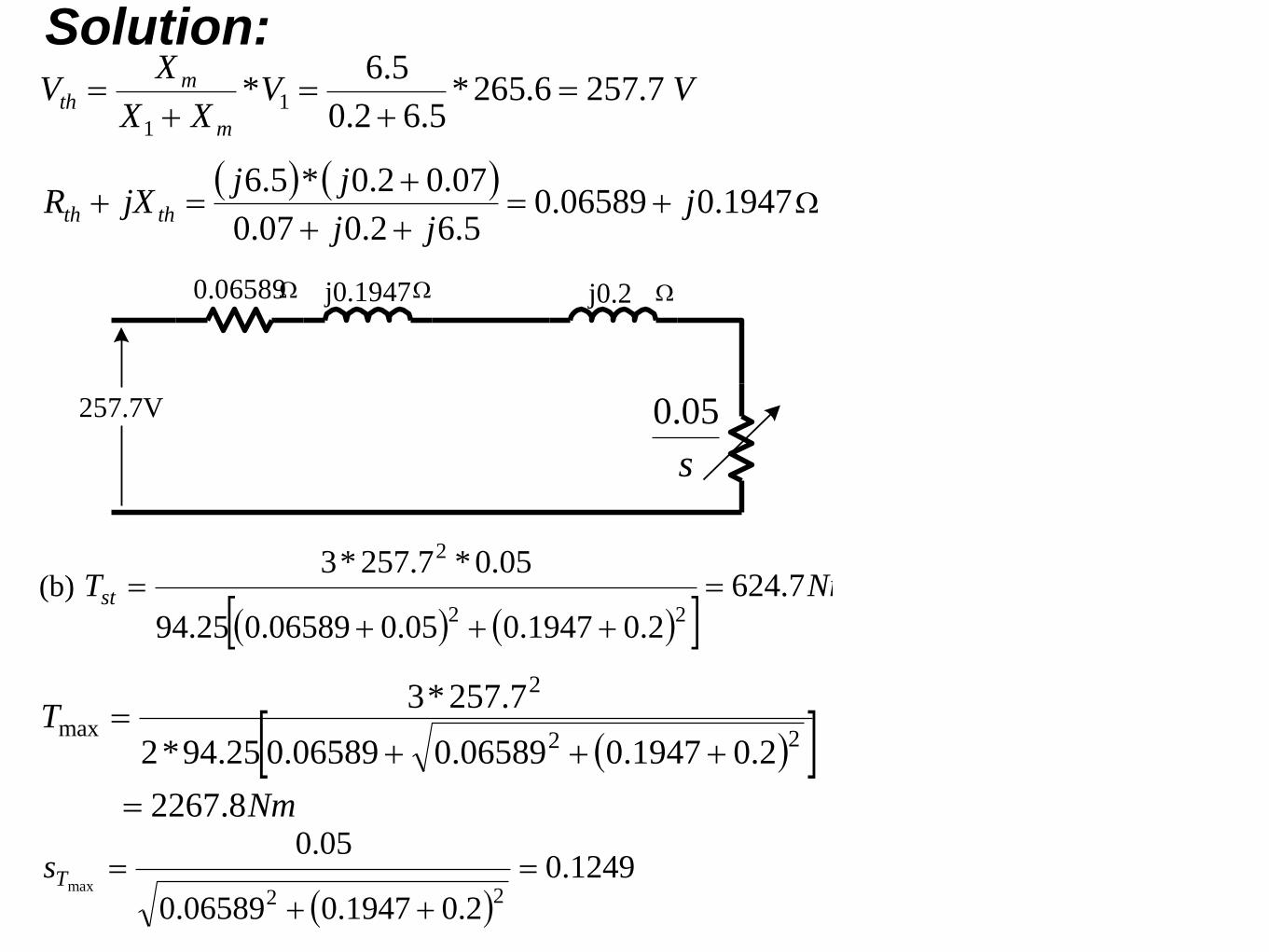
Solution:VV
XX
XV
m
mth 7.2576.265*
5.62.0
5.6* 1
1
1947.006589.0
5.62.007.0
07.02.0*5.6j
jj
jjjXR thth
0.06589 j0.1947 j0.2
s
05.0
257.7V
(b)
NmTst 7.624
2.01947.005.006589.025.94
05.0*7.257*3
22
2
Nm
T
8.2267
2.01947.006589.006589.025.94*2
7.257*322
2
max
1249.0
2.01947.006589.0
05.0
22max
Ts
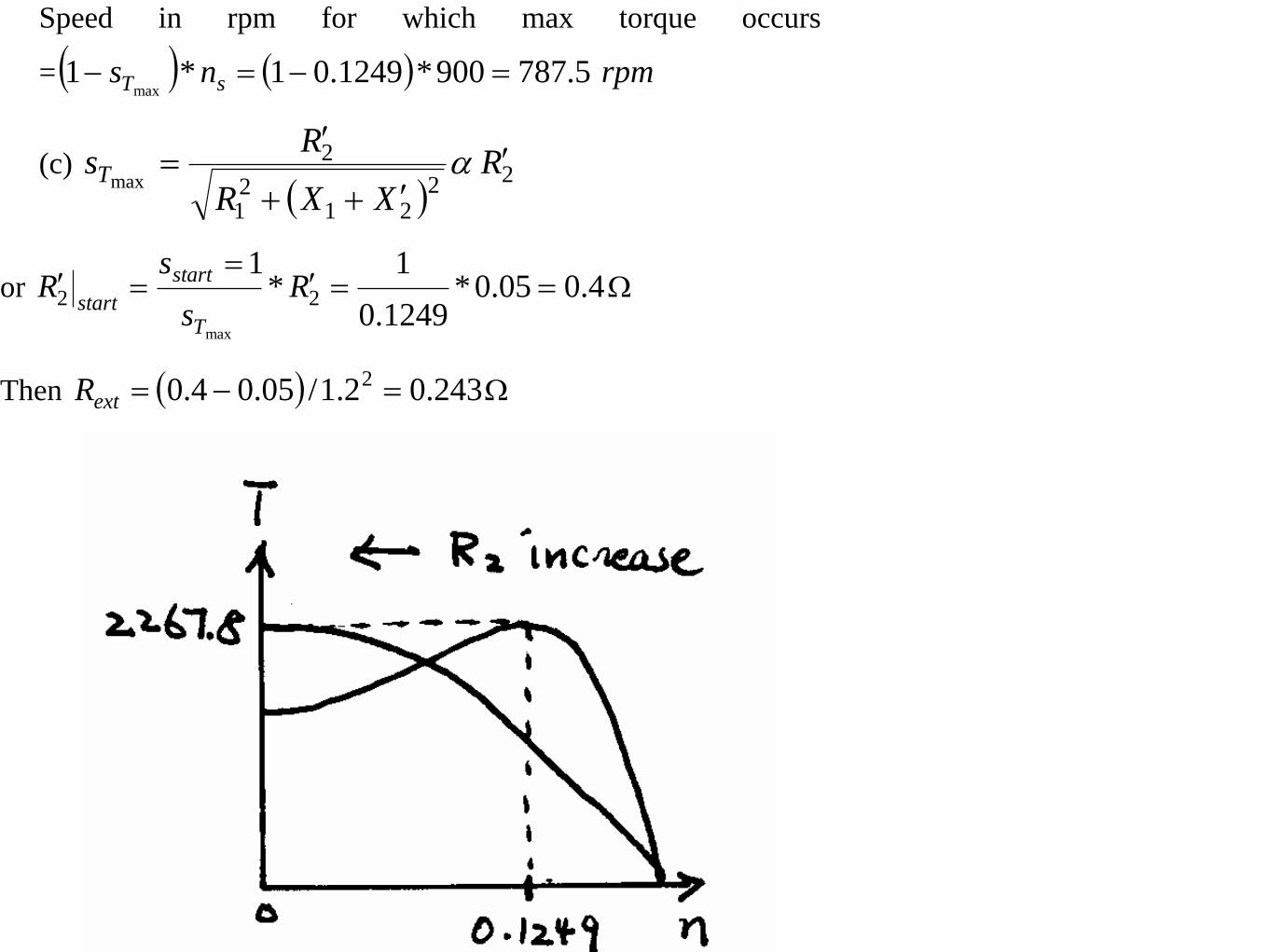
Speed in rpm for which max torque occurs
= rpmns sT 5.787900*1249.01*1max
(c)
22
2121
2
maxR
XXR
RsT
or 4.005.0*1249.0
1*
122
max
Rs
sR
T
start
start
Then 243.02.1/05.04.0 2 extR
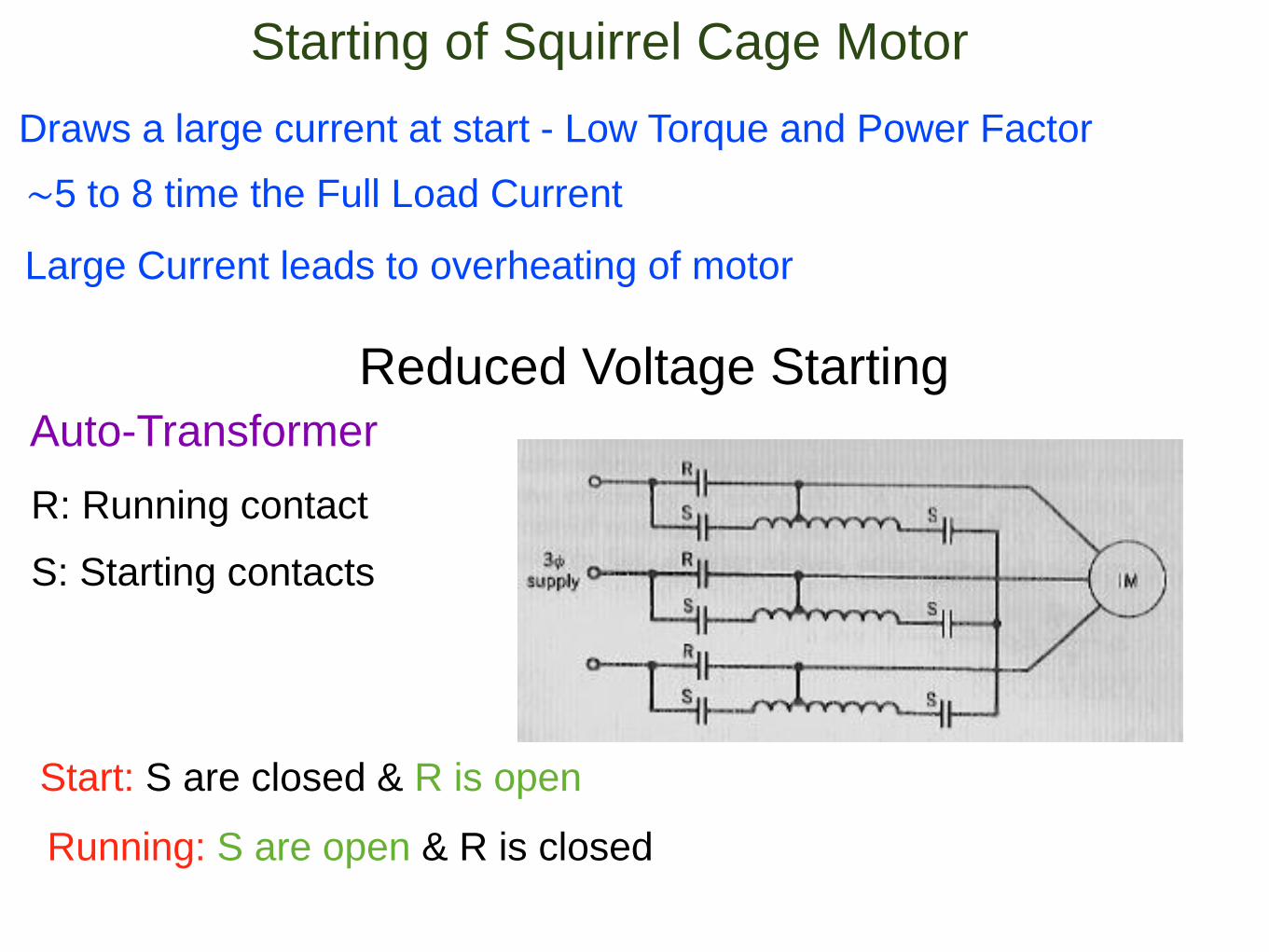
Starting of Squirrel Cage Motor
Draws a large current at start - Low Torque and Power Factor
∼5 to 8 time the Full Load Current
Large Current leads to overheating of motor
Reduced Voltage Starting
Auto-Transformer
R: Running contact
S: Starting contacts
Start: S are closed & R is open
Running: S are open & R is closed
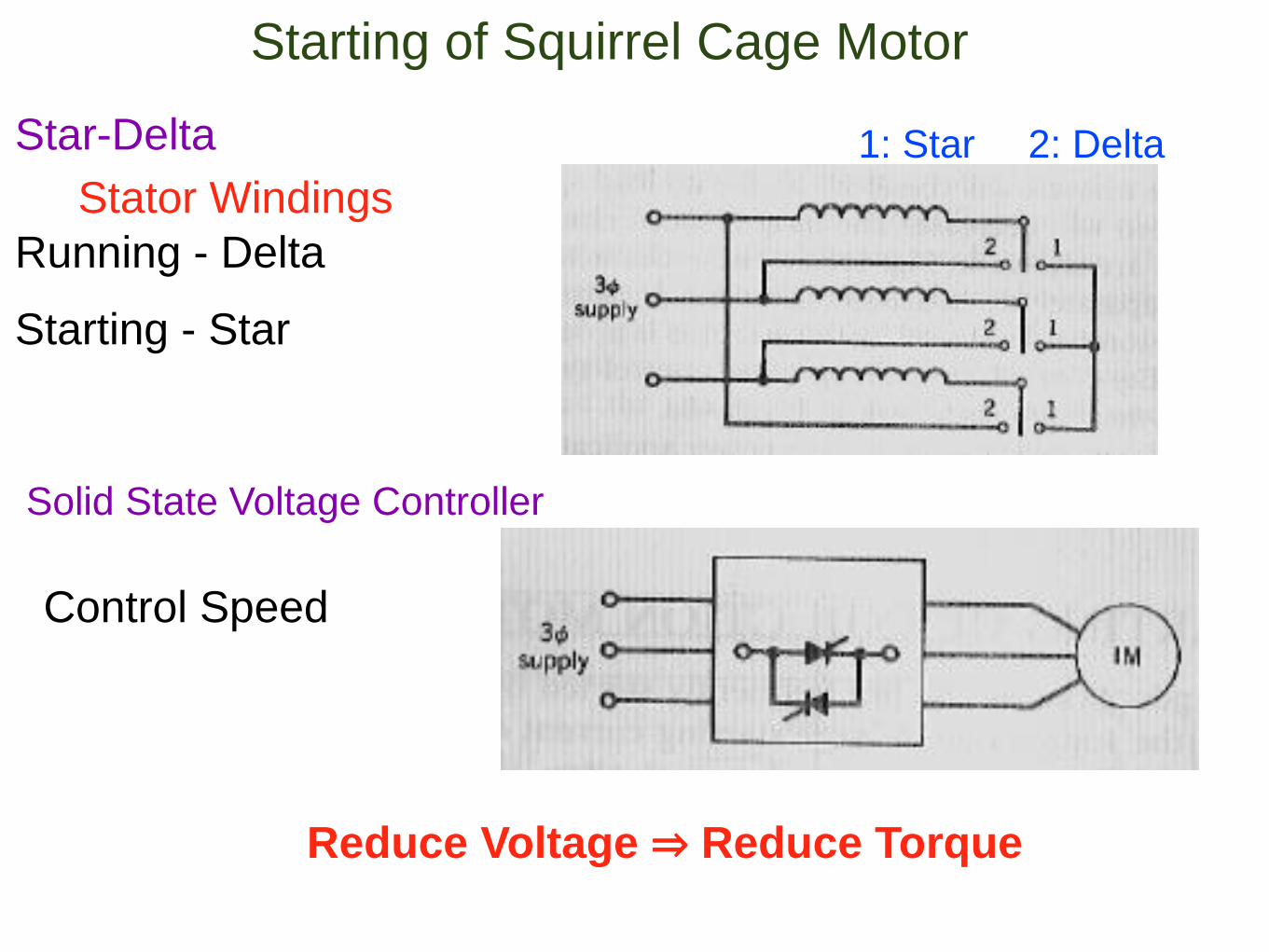
Starting of Squirrel Cage Motor
Star-Delta 1: Star 2: Delta
Running - Delta
Starting - Star
Solid State Voltage Controller
Stator Windings
Control Speed
Reduce Voltage ⇒ Reduce Torque