Embed Size (px)
Citation preview
Indoor Location Sensing: Principals, Potentials, and Practice
J IE L IU
HARBIN INSTITUTE OF TECHNOLOGY ( SHENZHEN)
j ie l iu@hit .edu.cn
"The light of navigation", Dutch
sailing handbook, 1608, showing
compass, hourglass, sea astrolabe,
terrestrial and celestial globes,
divider, Jacob's staff and astrolabe.
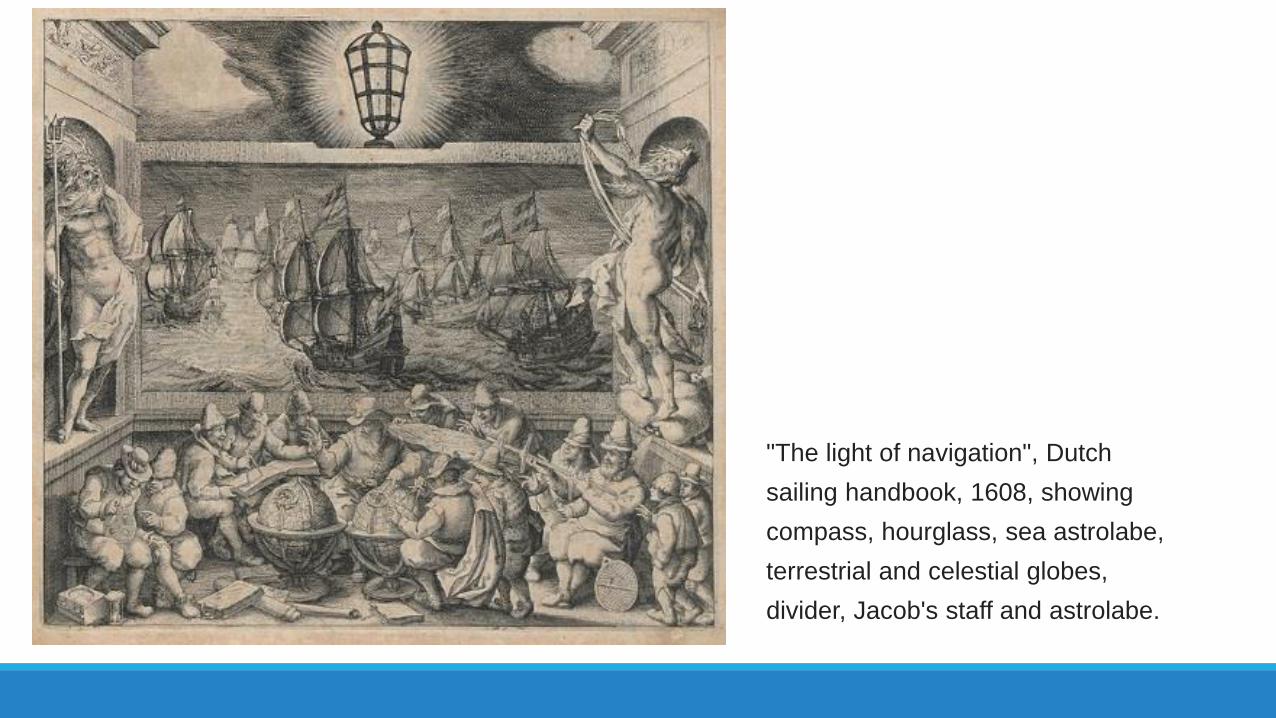
‘80 ‘90 ‘00 ‘10June 23, 1977
Next Billion
Devices
Modern Location Sensing Proliferation

Paradigms of Location Sensing
• Geometric-based: estimate locations directly from geometric measurements
• Experience-based: estimate locations from features collected from the past
• Tracking-based: estimate locations from past locations and motion
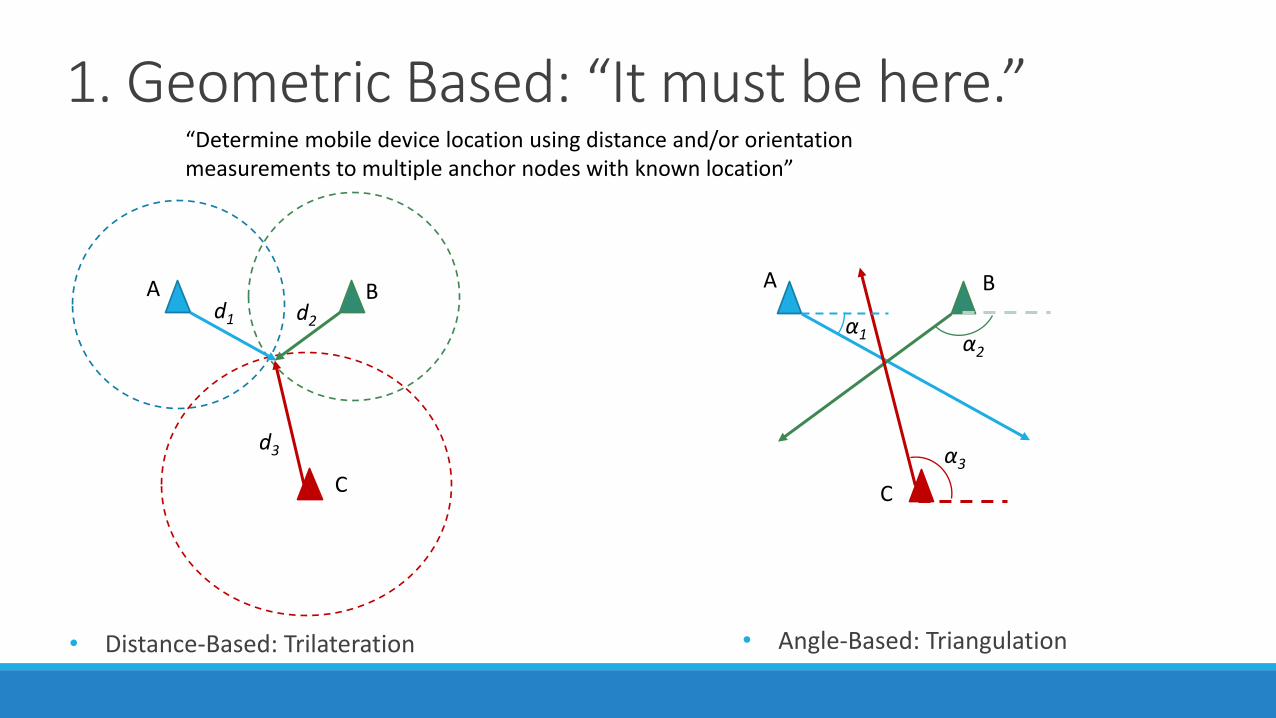
1. Geometric Based: “It must be here.”
• Distance-Based: Trilateration
d1A B
C
d2
d3
A B
C
α2
α3
α1
• Angle-Based: Triangulation
“Determine mobile device location using distance and/or orientation measurements to multiple anchor nodes with known location”
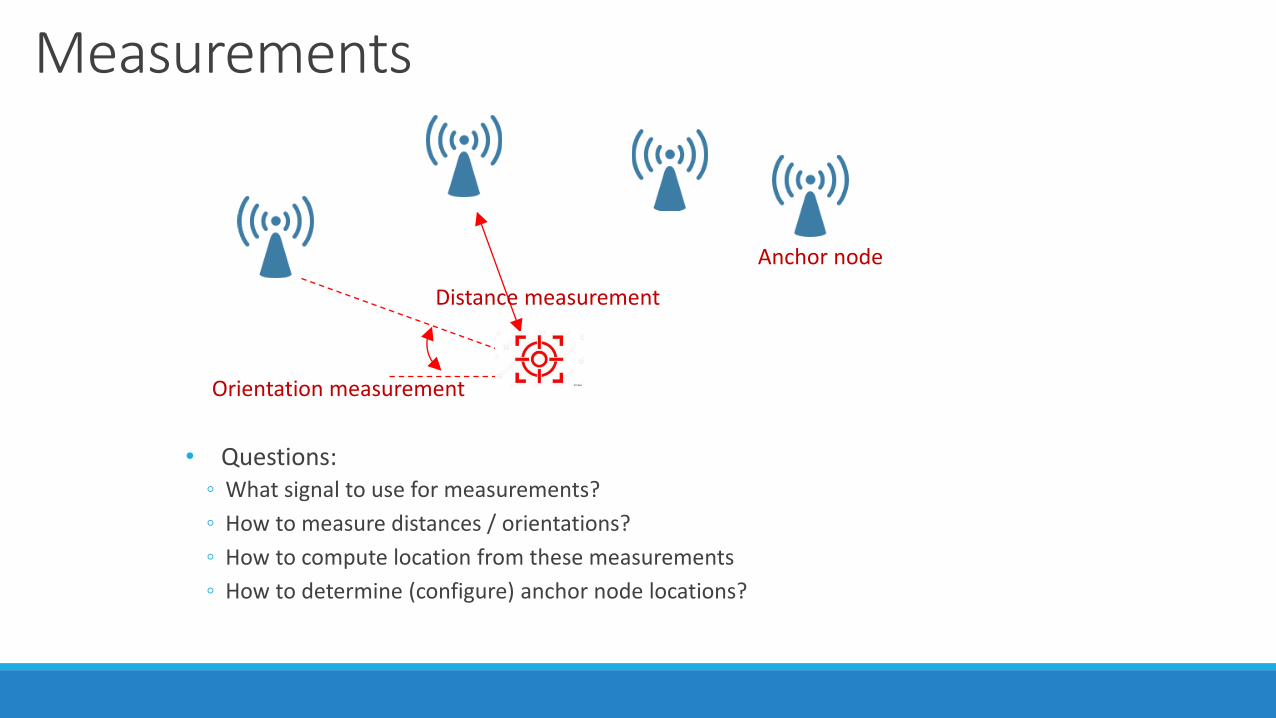
Measurements
• Questions:◦ What signal to use for measurements?
◦ How to measure distances / orientations?
◦ How to compute location from these measurements
◦ How to determine (configure) anchor node locations?
Anchor node
Distance measurement
Orientation measurement
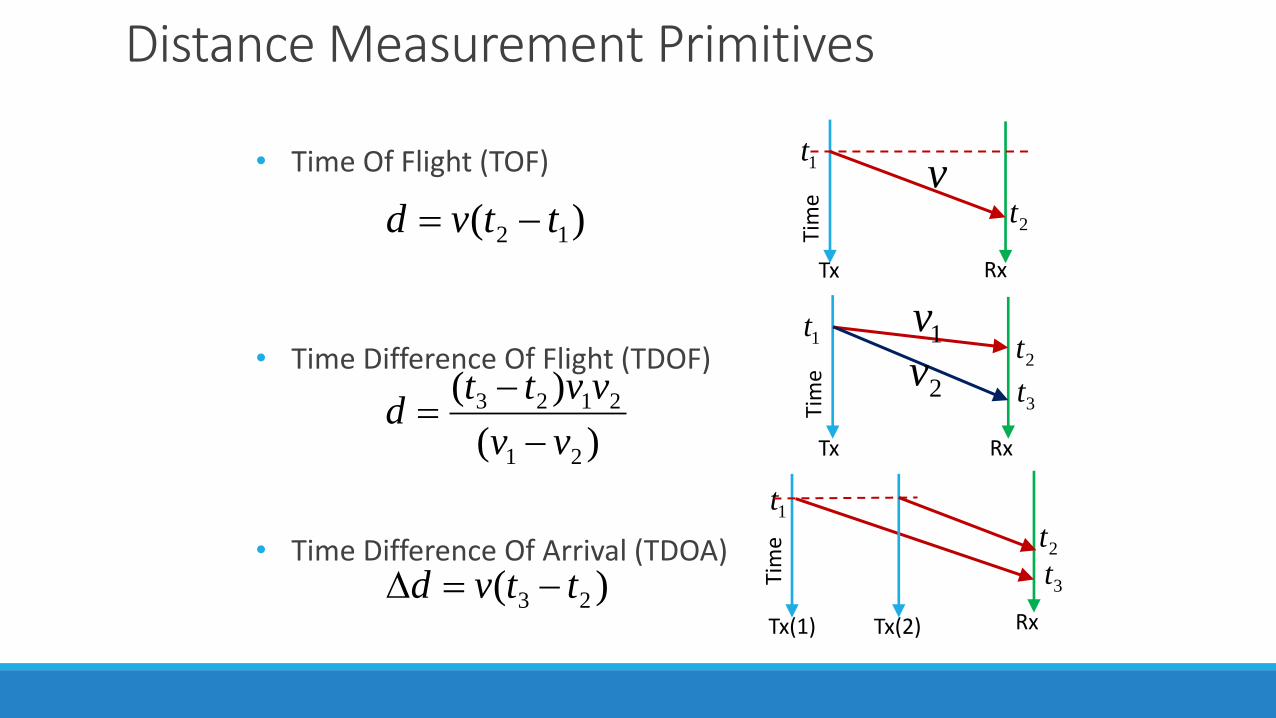
Distance Measurement Primitives
• Time Of Flight (TOF)
• Time Difference Of Flight (TDOF)
• Time Difference Of Arrival (TDOA)
Tim
e
1t
2t
Tx Rx
Tim
e
1t2t
Tx Rx
3t
Tim
e
Tx(1)
1t
2t
Tx(2) Rx
3t
)( 12 ttvd −=v
1v
2v
)(
)(
21
2123
vv
vvttd
−
−=
)( 23 ttvd −=
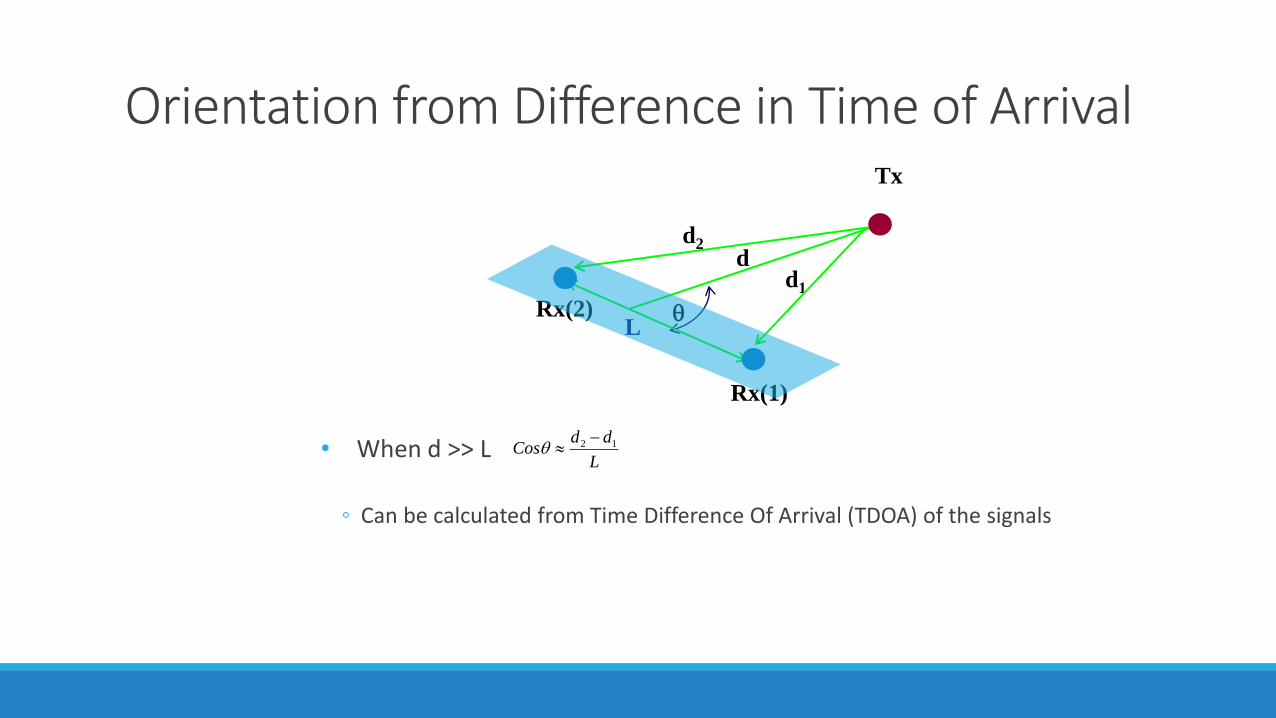
Orientation from Difference in Time of Arrival
• When d >> L
◦ Can be calculated from Time Difference Of Arrival (TDOA) of the signals
Tx
dd2
d1
Lq
L
ddCos 12 −q
Rx(1)
Rx(2)
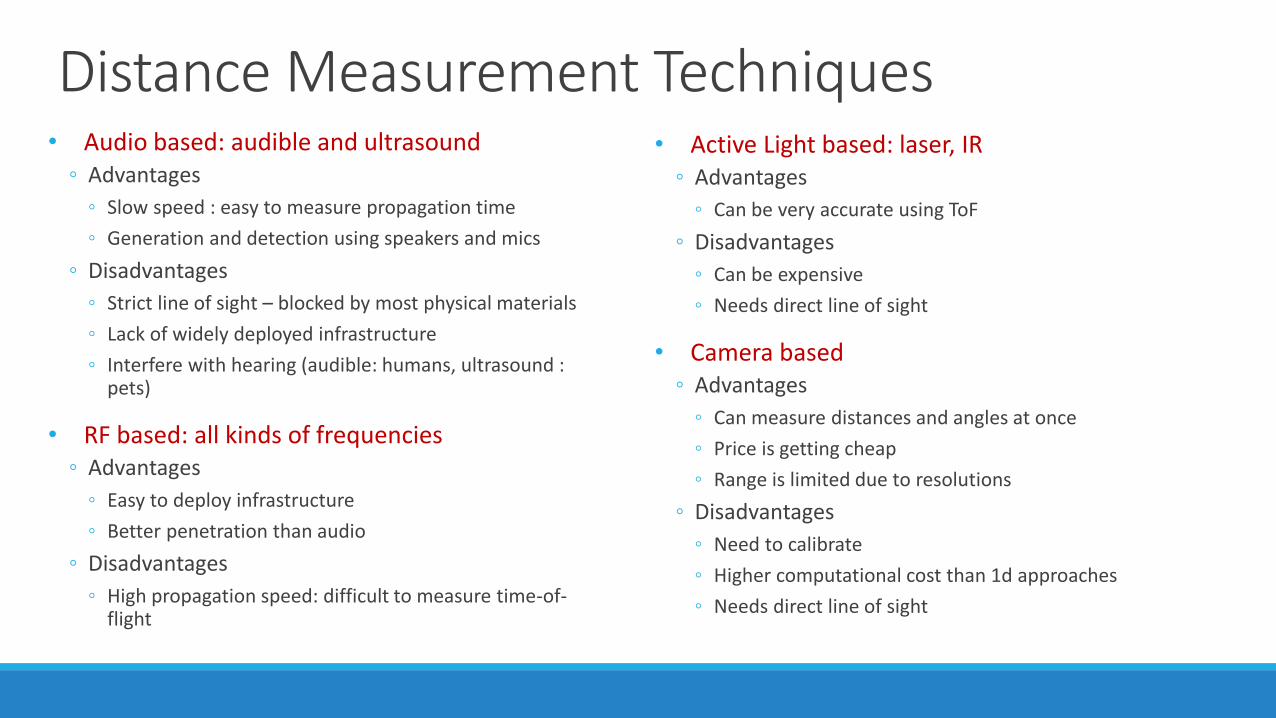
Distance Measurement Techniques • Audio based: audible and ultrasound
◦ Advantages
◦ Slow speed : easy to measure propagation time
◦ Generation and detection using speakers and mics
◦ Disadvantages
◦ Strict line of sight – blocked by most physical materials
◦ Lack of widely deployed infrastructure
◦ Interfere with hearing (audible: humans, ultrasound : pets)
• RF based: all kinds of frequencies ◦ Advantages
◦ Easy to deploy infrastructure
◦ Better penetration than audio
◦ Disadvantages
◦ High propagation speed: difficult to measure time-of-flight
• Active Light based: laser, IR◦ Advantages
◦ Can be very accurate using ToF
◦ Disadvantages
◦ Can be expensive
◦ Needs direct line of sight
• Camera based◦ Advantages
◦ Can measure distances and angles at once
◦ Price is getting cheap
◦ Range is limited due to resolutions
◦ Disadvantages
◦ Need to calibrate
◦ Higher computational cost than 1d approaches
◦ Needs direct line of sight
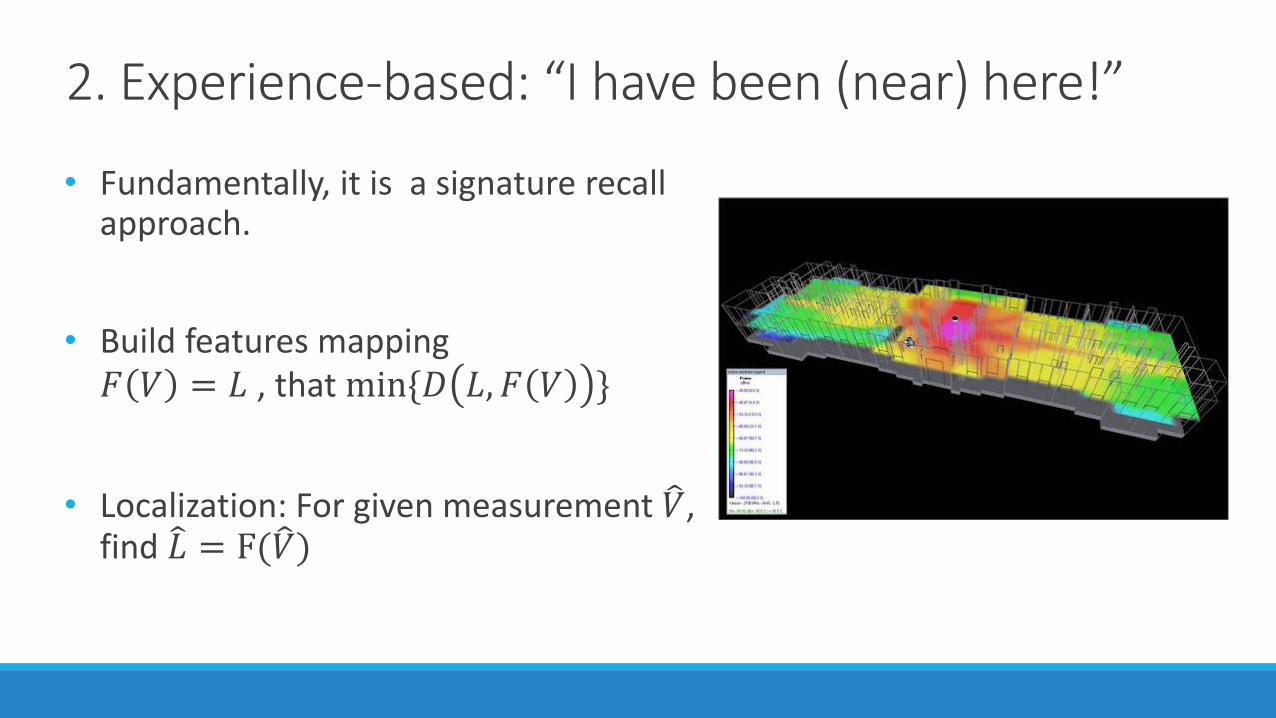
2. Experience-based: “I have been (near) here!”
• Fundamentally, it is a signature recall approach.
• Build features mapping 𝐹 𝑉 = 𝐿 , that min{𝐷 𝐿, 𝐹 𝑉 }
• Localization: For given measurement 𝑉, find 𝐿 = F( 𝑉)
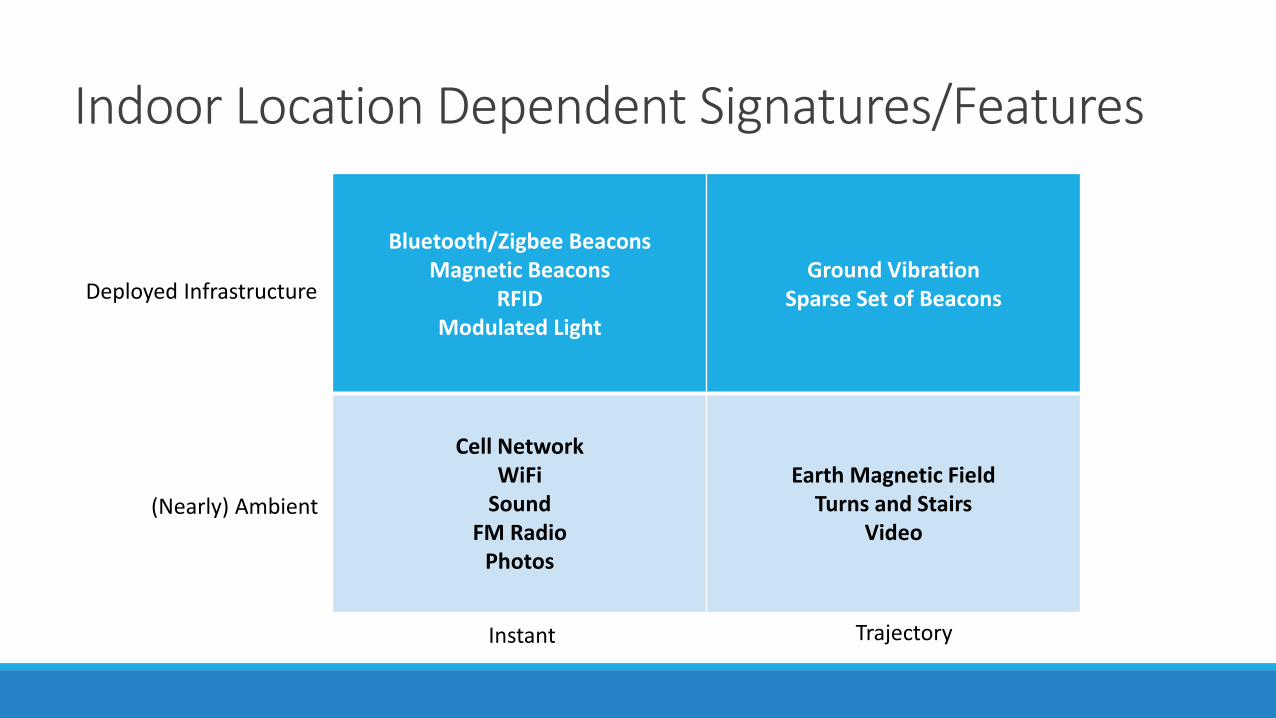
Indoor Location Dependent Signatures/Features
Bluetooth/Zigbee BeaconsMagnetic Beacons
RFIDModulated Light
Ground VibrationSparse Set of Beacons
Cell NetworkWiFi
SoundFM Radio
Photos
Earth Magnetic FieldTurns and Stairs
Video
Instant Trajectory
(Nearly) Ambient
Deployed Infrastructure
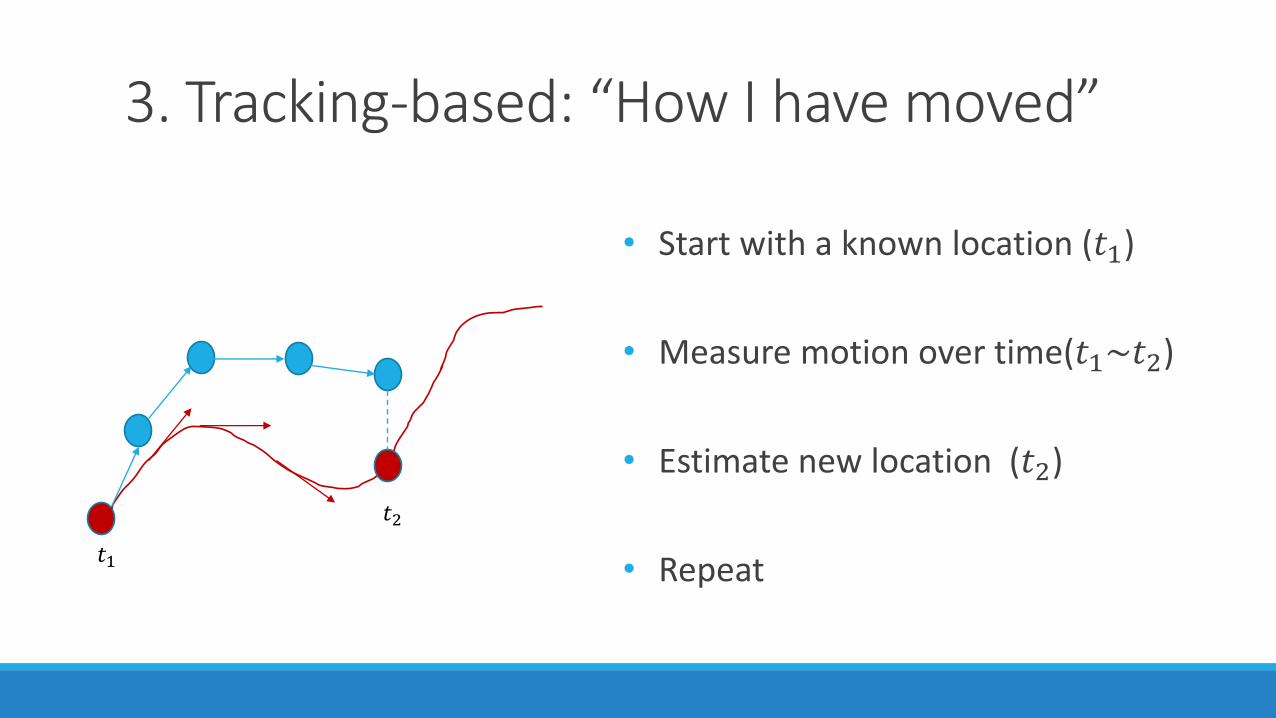
3. Tracking-based: “How I have moved”
• Start with a known location (𝑡1)
• Measure motion over time(𝑡1~𝑡2)
• Estimate new location (𝑡2)
• Repeat𝑡1
𝑡2
4. Sensor Fusion: Combining Two or More Approaches
• Two or more types of complementary signals (modalities): ◦ To measure distances: e.g. Cricket (RF + Ultrasound)◦ To compensate signatures: e.g. FM + WiFi
• Absolute location with motion tracking: E.g.◦ WiFi + step counting ◦ Markers + visual odometry
• Location/movement + side knowledge : E.g. ◦ Loop closure◦ Map constraints
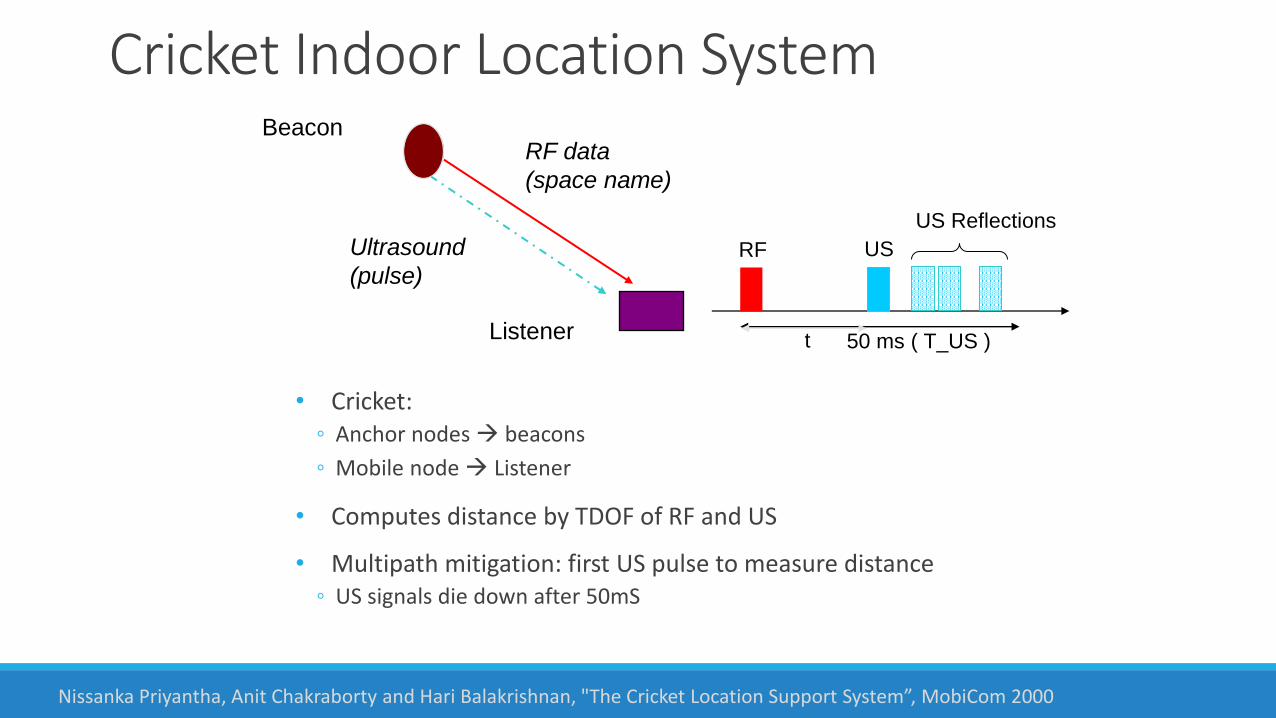
Cricket Indoor Location System
• Cricket: ◦ Anchor nodes → beacons
◦ Mobile node → Listener
• Computes distance by TDOF of RF and US
• Multipath mitigation: first US pulse to measure distance◦ US signals die down after 50mS
RF data
(space name)
Beacon
Listener
Ultrasound
(pulse)RF US
US Reflections
50 ms ( T_US )t
Nissanka Priyantha, Anit Chakraborty and Hari Balakrishnan, "The Cricket Location Support System”, MobiCom 2000
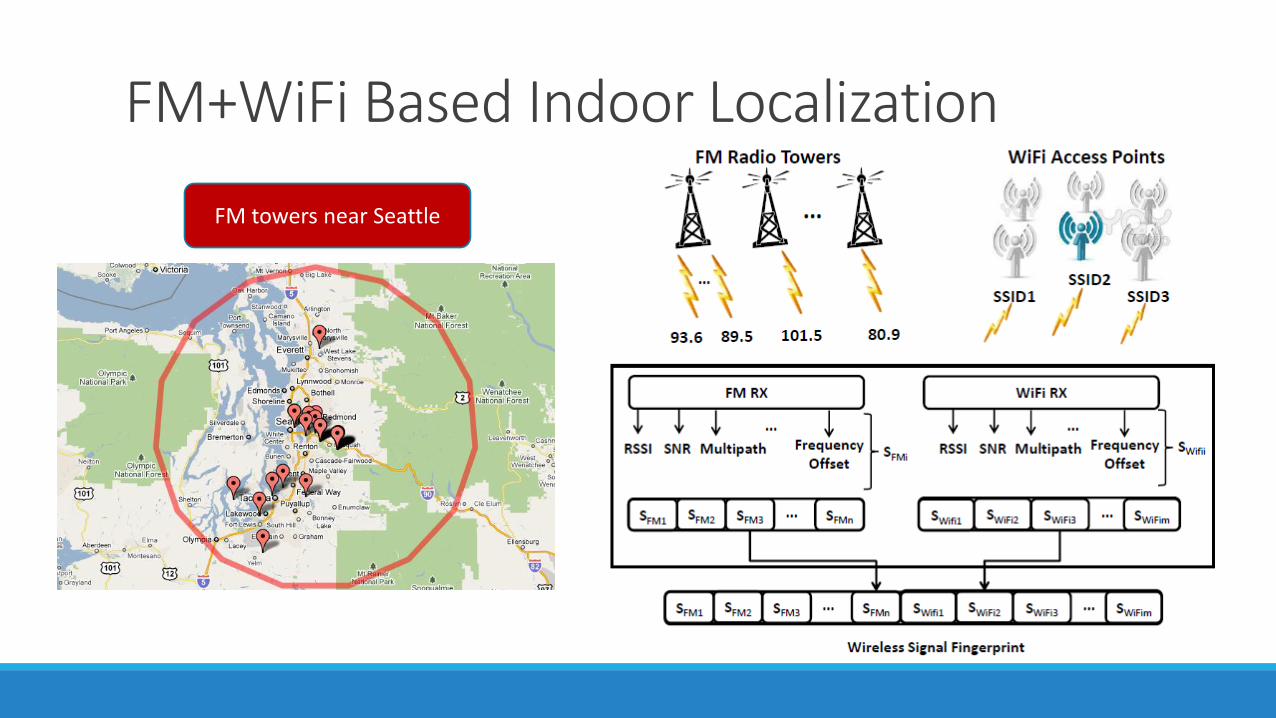
FM+WiFi Based Indoor Localization
FM towers near Seattle
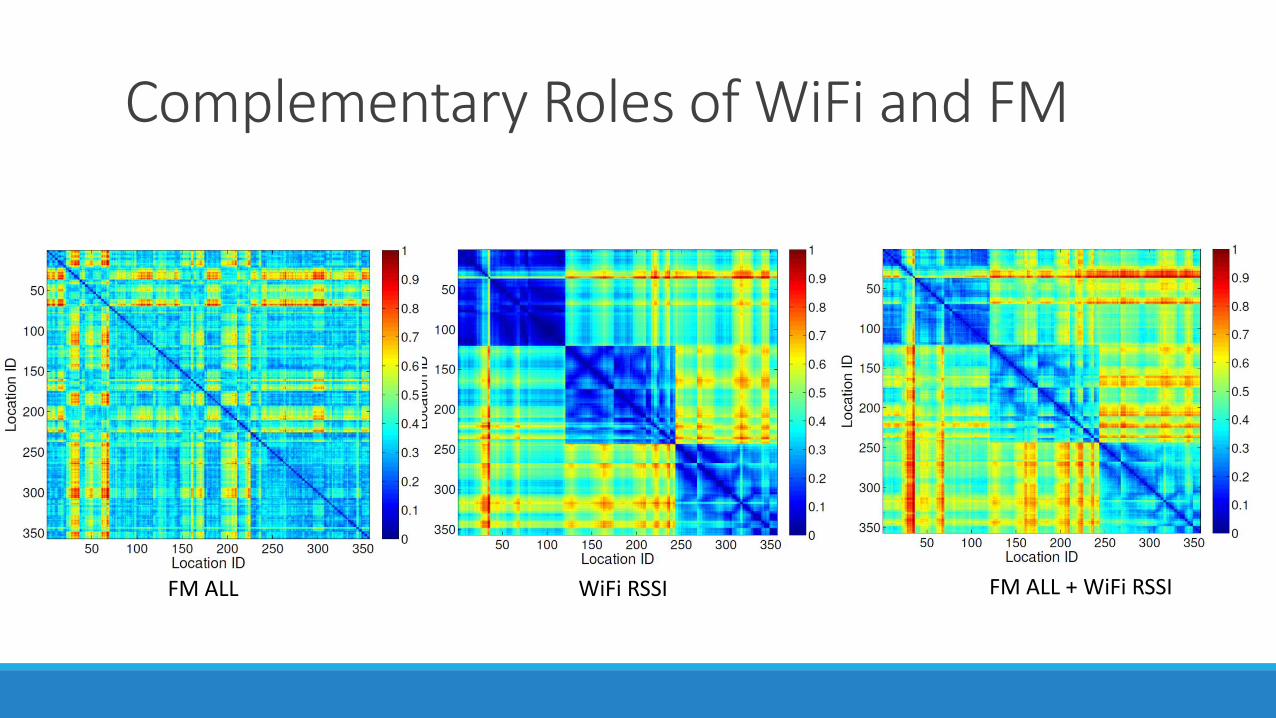
Complementary Roles of WiFi and FM
FM ALL WiFi RSSI FM ALL + WiFi RSSI
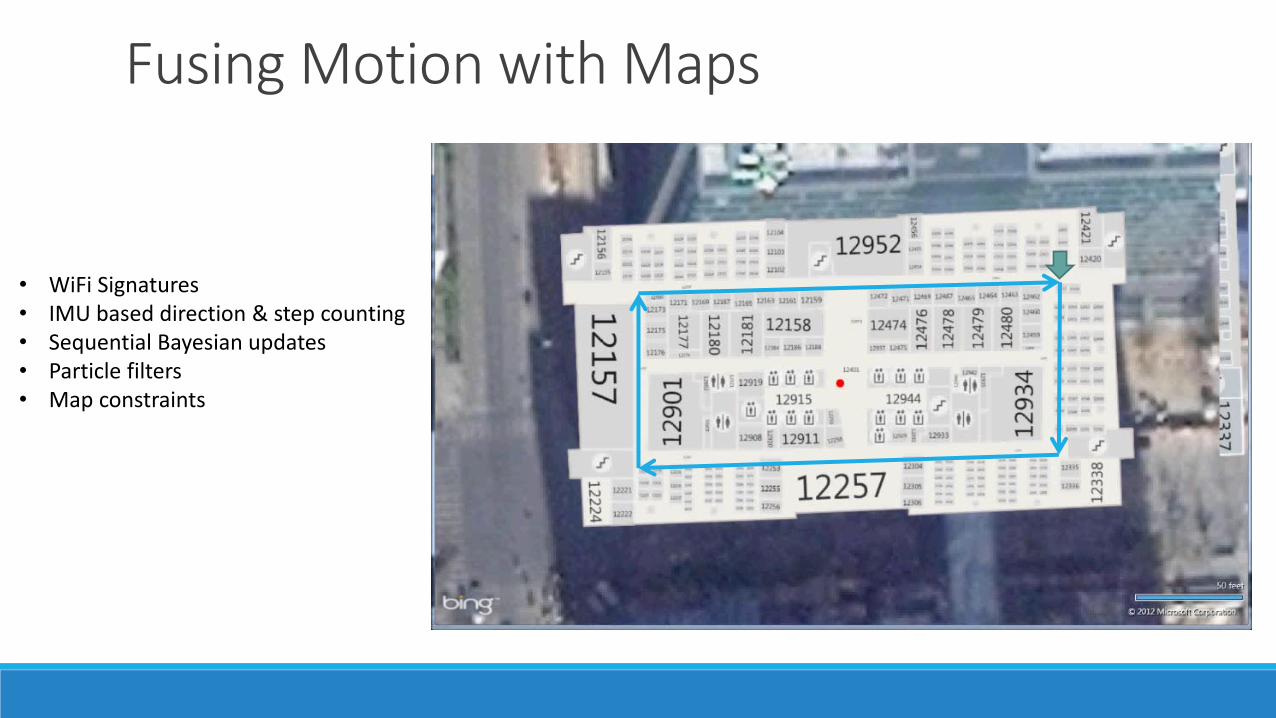
Fusing Motion with Maps
• WiFi Signatures• IMU based direction & step counting • Sequential Bayesian updates• Particle filters• Map constraints
Potentials:Indoor location examined
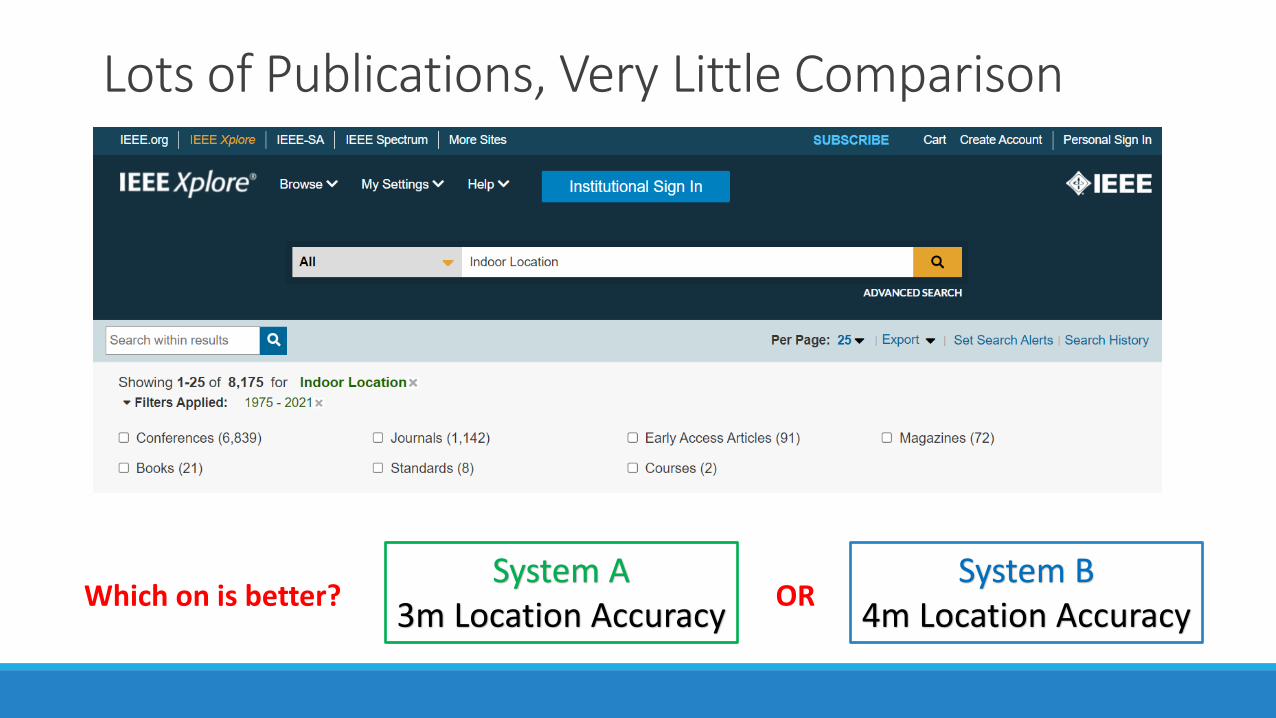
Lots of Publications, Very Little Comparison
System A3m Location Accuracy
System B4m Location Accuracy
ORWhich on is better?

Microsoft Indoor Location Competitions
• Evaluate and compare technologies from academia and industry in the same, unfamiliar space.
• Bring teams working in this area together in a more effective way.
2014: Berlin 2015: Seattle 2016: Vienna 2017: Pittsburgh 2018: Porto
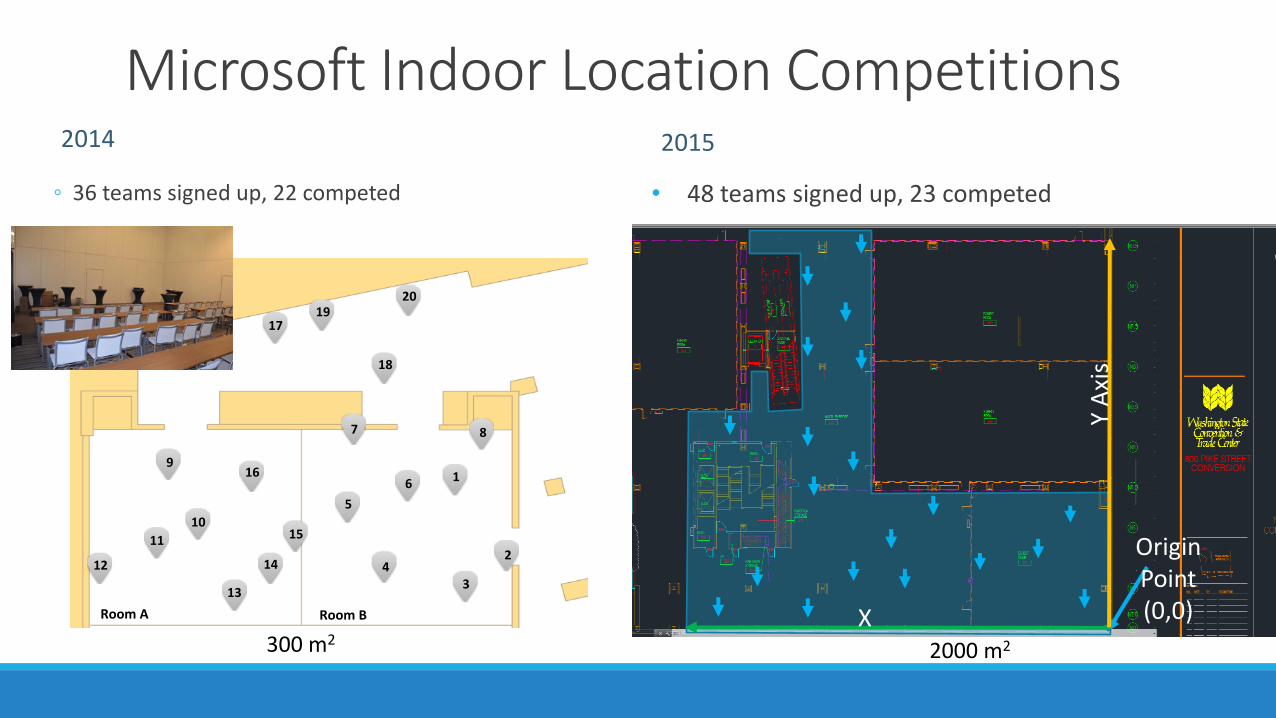
Microsoft Indoor Location Competitions2014
◦ 36 teams signed up, 22 competed
2015
• 48 teams signed up, 23 competed
Room A Room B
8
1
2
34
5
6
7
9
10
11
12
13
14
15
16
17
18
1920
300 m2
Origin Point(0,0)
Y A
xis
X Axis 2000 m2

Basic RulesINFRASTRUCTURE FREE
• Pre-deployed 10 WiFi AP for everyone.
INFRASTRUCTURE ASSISTED
• Allow deployment of up to 10 devices
• 8 hours of setup up time
• Unknown evaluation points
• Individually evaluated to prevent interference.
Craziness
Craziness
More Craziness
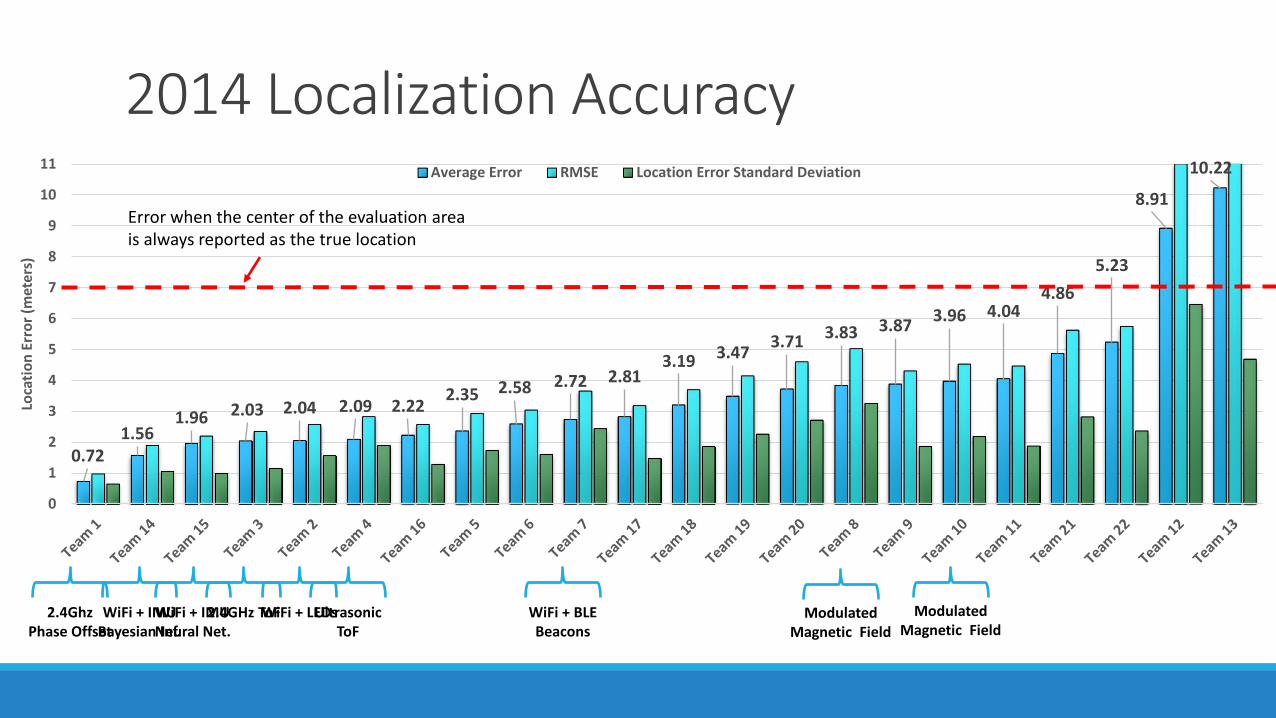
2014 Localization Accuracy
0.721.56
1.96 2.03 2.04 2.09 2.222.35 2.58 2.72 2.81
3.19 3.473.71 3.83 3.87
3.96 4.044.86
5.23
8.91
10.22
0
1
2
3
4
5
6
7
8
9
10
11
Loca
tio
n E
rro
r (m
eter
s)
Average Error RMSE Location Error Standard Deviation
2.4Ghz Phase Offset
WiFi + IMUBayesian Inf.
WiFi + IMUNeural Net.
2.4GHz ToFWiFi + LEDsUltrasonic ToF
WiFi + BLE Beacons
Modulated Magnetic Field
Modulated Magnetic Field
Error when the center of the evaluation area is always reported as the true location
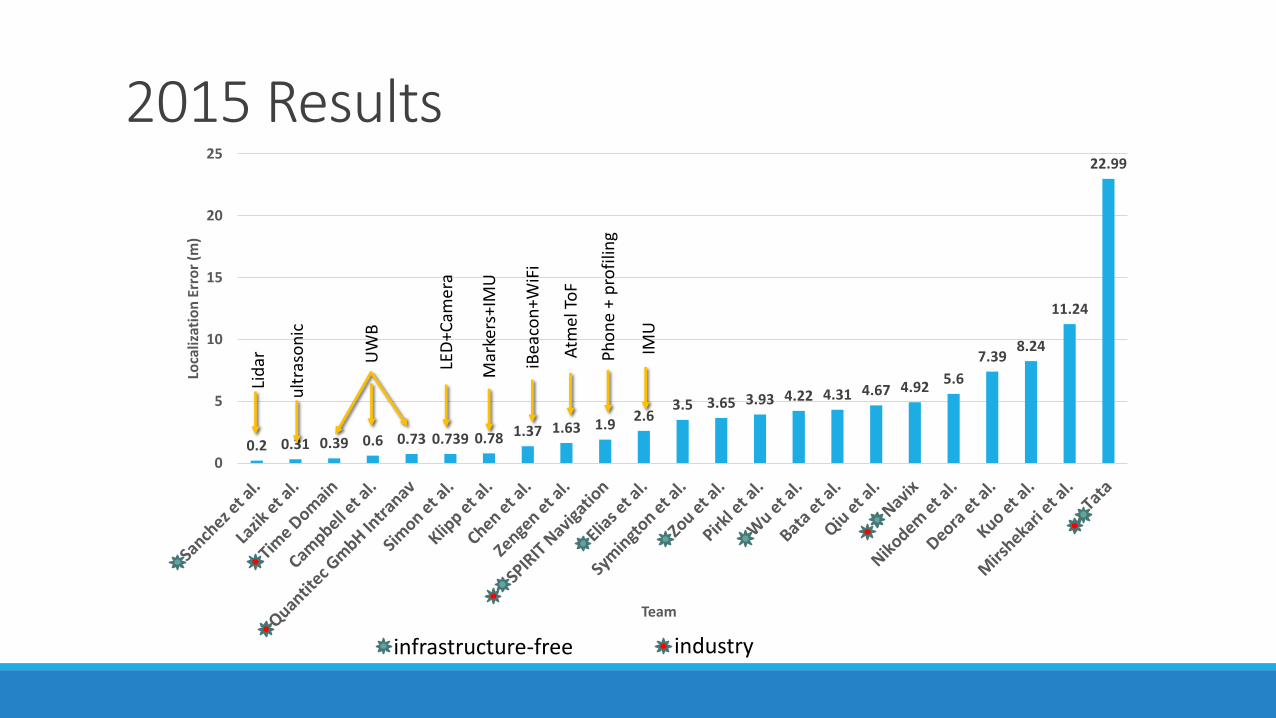
2015 Results
0.2 0.31 0.39 0.6 0.73 0.739 0.78 1.37 1.63 1.92.6
3.5 3.65 3.93 4.22 4.31 4.67 4.925.6
7.398.24
11.24
22.99
0
5
10
15
20
25
Loca
lizat
ion
Err
or
(m)
Team
infrastructure-free industry
Lid
ar
ult
raso
nic
UW
B
LED
+Cam
era
Mar
kers
+IM
U
iBea
con
+WiF
i
Atm
el T
oF
Ph
on
e +
pro
filin
g
IMU
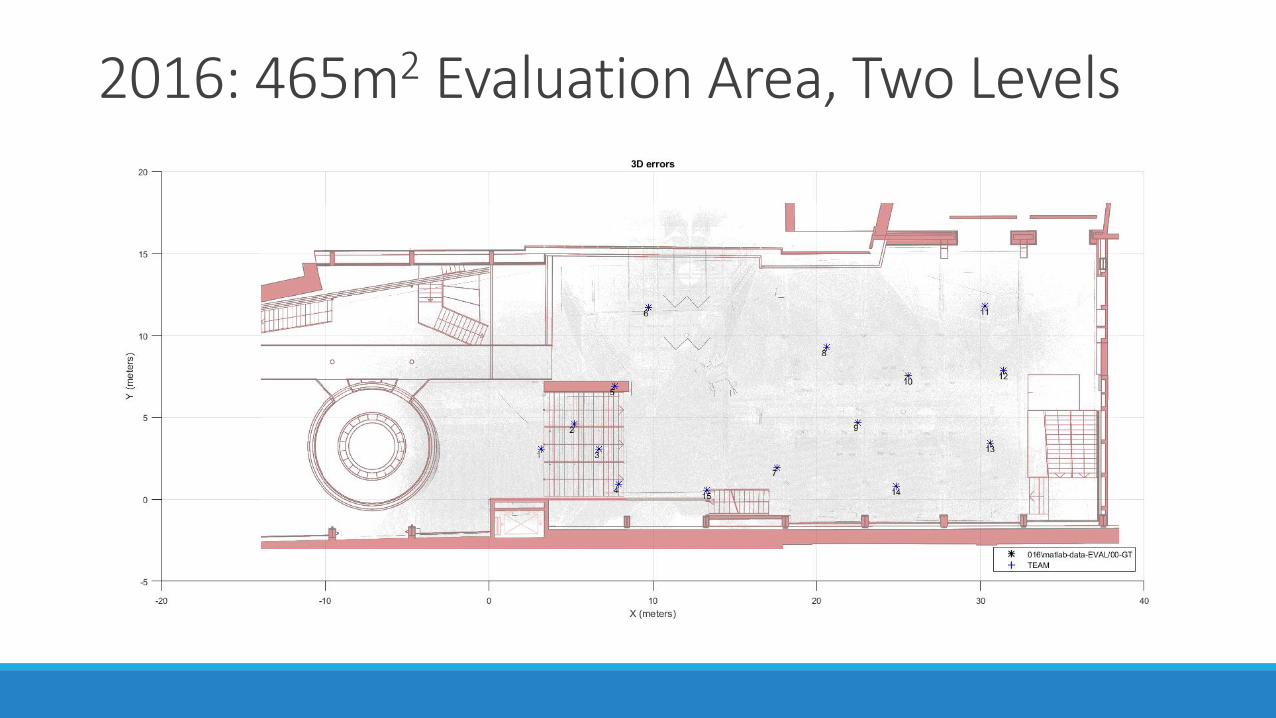
2016: 465m2 Evaluation Area, Two Levels
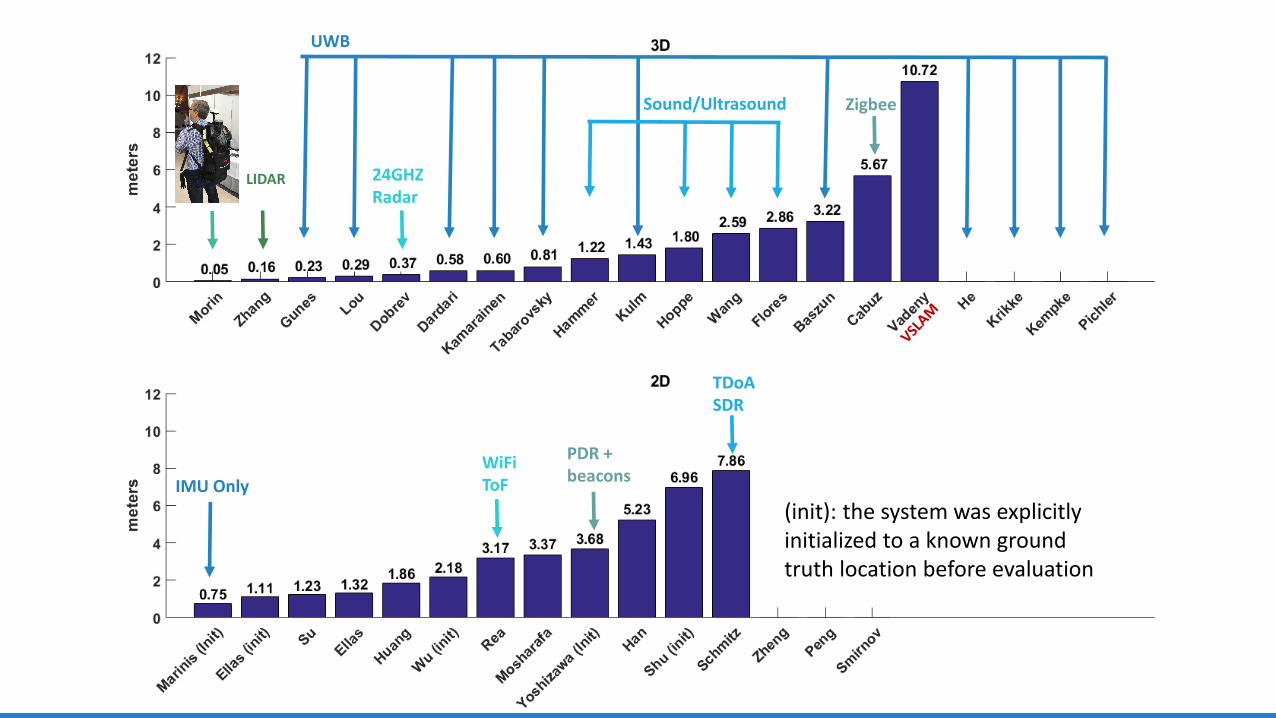
UWB
Sound/Ultrasound
24GHZRadar
LIDAR
Zigbee
IMU Only
PDR + beacons
TDoA SDR
WiFiToF
(init): the system was explicitly initialized to a known ground truth location before evaluation
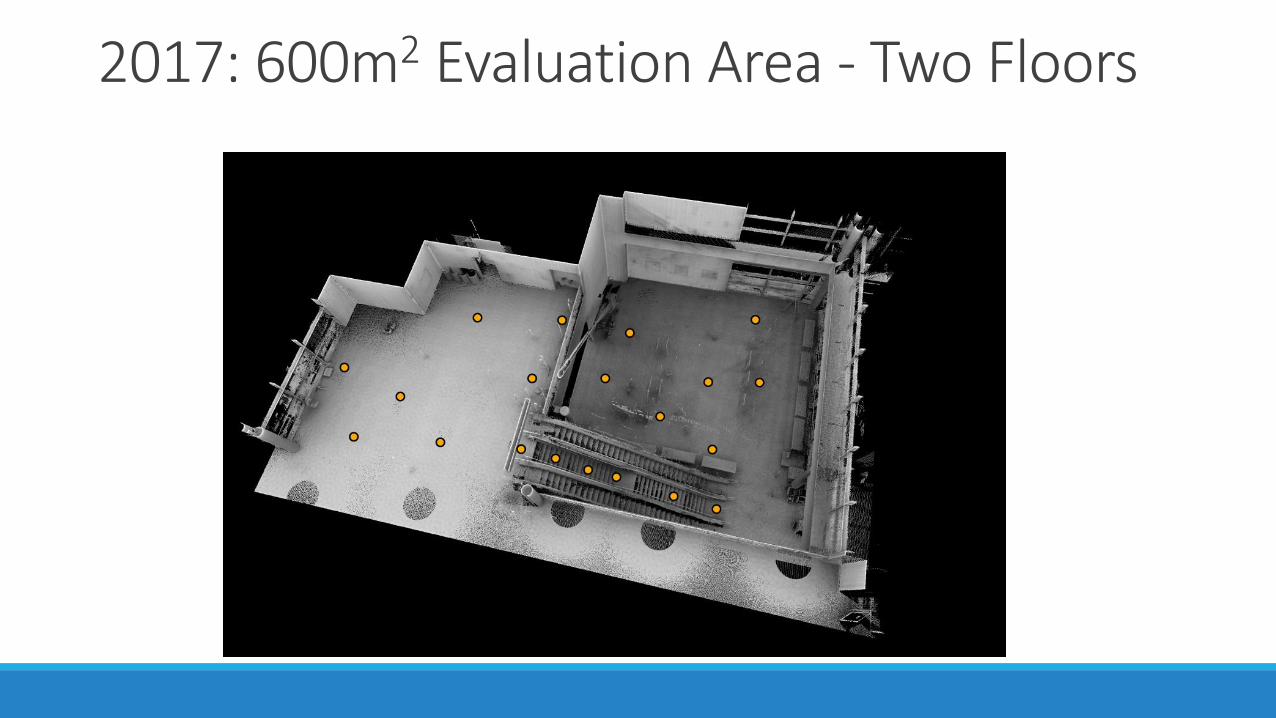
2017: 600m2 Evaluation Area - Two Floors
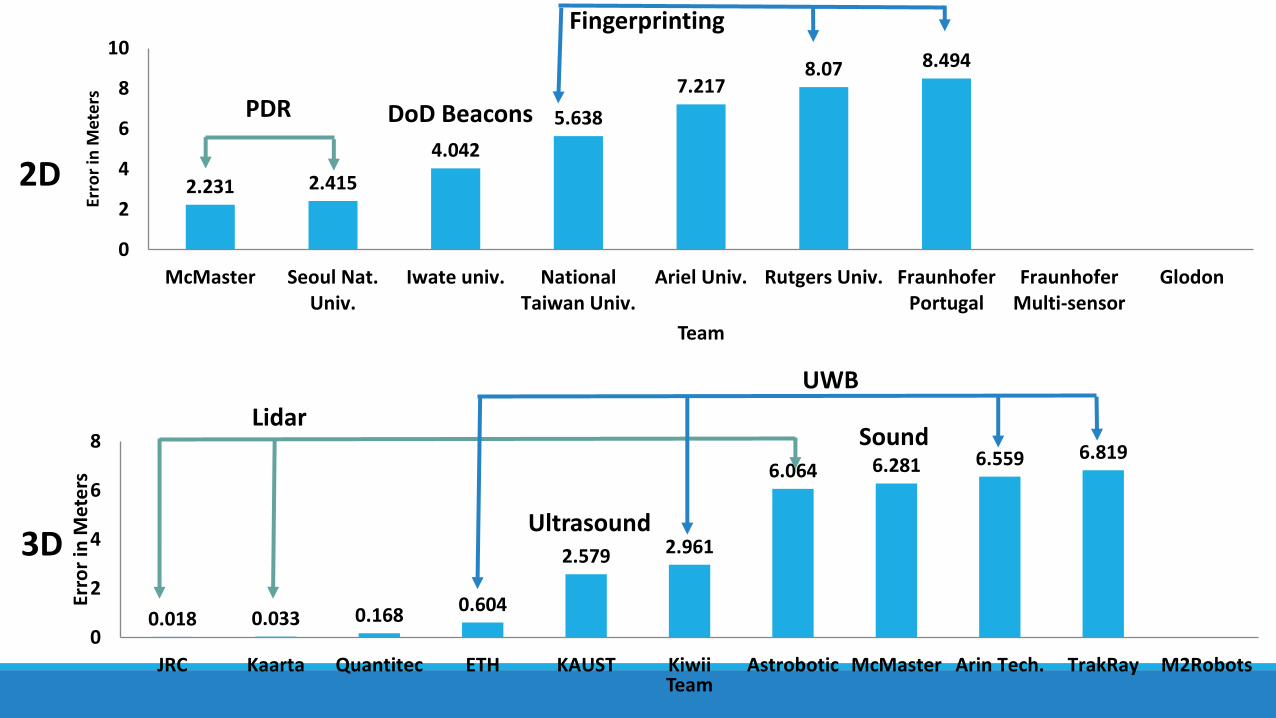
2.231 2.415
4.042
5.638
7.2178.07 8.494
0
2
4
6
8
10
McMaster Seoul Nat.Univ.
Iwate univ. NationalTaiwan Univ.
Ariel Univ. Rutgers Univ. FraunhoferPortugal
FraunhoferMulti-sensor
Glodon
Erro
r in
Met
ers
Team
0.018 0.033 0.1680.604
2.579 2.961
6.064 6.281 6.559 6.819
0
2
4
6
8
JRC Kaarta Quantitec ETH KAUST Kiwii Astrobotic McMaster Arin Tech. TrakRay M2Robots
Erro
r in
Met
ers
Team
2D
3D
PDR
Fingerprinting
DoD Beacons
Lidar
Ultrasound
Sound
UWB
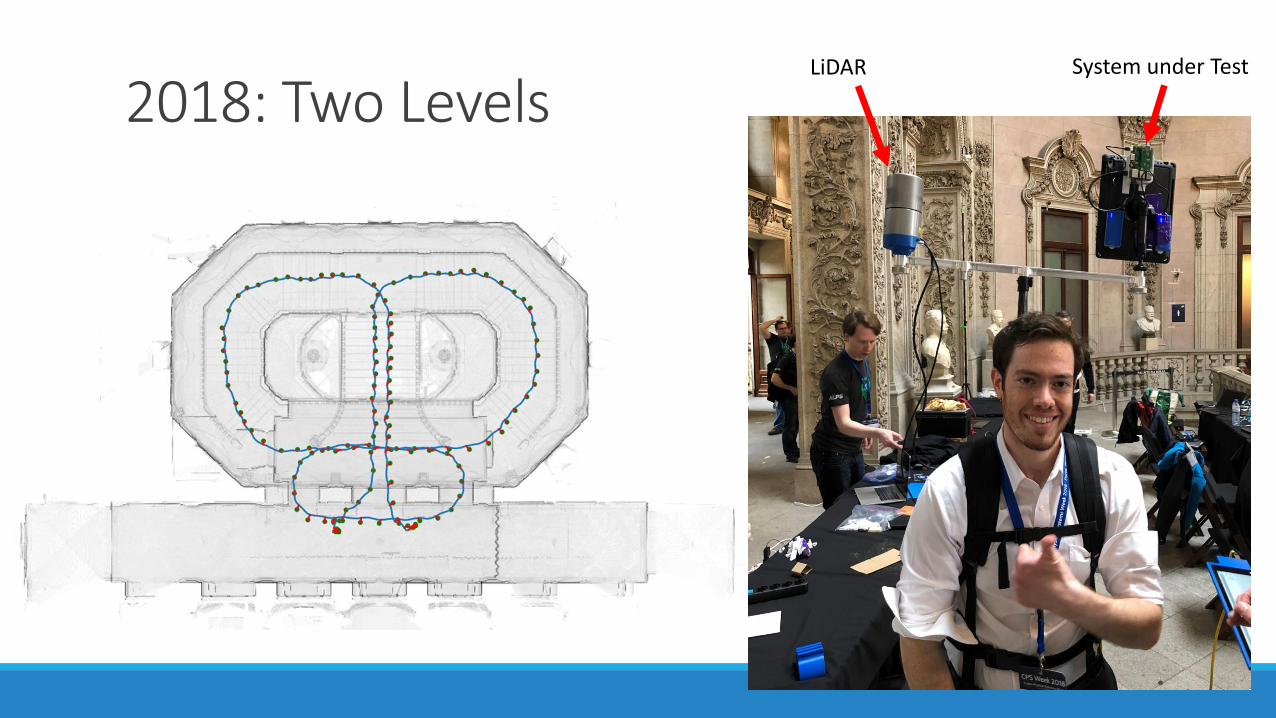
2018: Two LevelsLiDAR System under Test
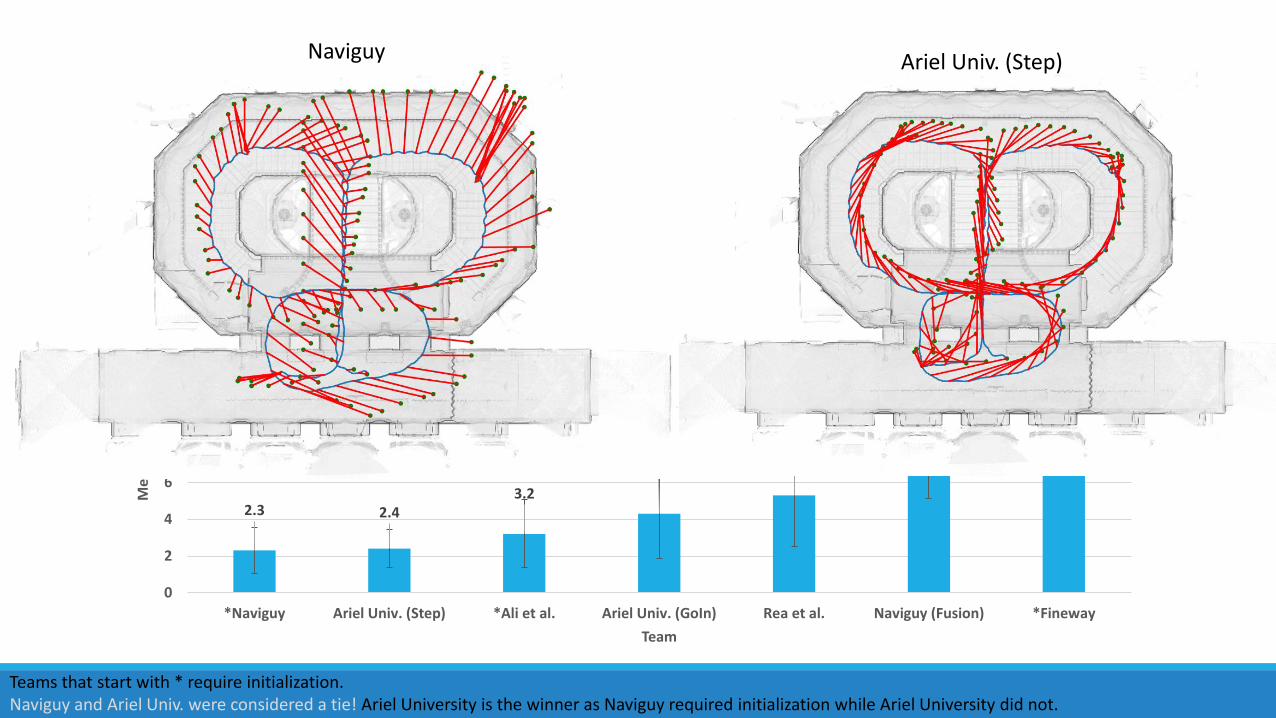
2D Results
2.3 2.43.2
4.3
5.3
9.4
12.5
0
2
4
6
8
10
12
14
16
18
20
*Naviguy Ariel Univ. (Step) *Ali et al. Ariel Univ. (GoIn) Rea et al. Naviguy (Fusion) *Fineway
Mea
n L
oca
lizat
ion
Err
or
(m)
Team
PDR
PDR + Fingerprinting
WiFi ToF
Camera+PDR
Camera+PDR+Finger.
Teams that start with * require initialization.Naviguy and Ariel Univ. were considered a tie! Ariel University is the winner as Naviguy required initialization while Ariel University did not.
Naviguy Ariel Univ. (Step)
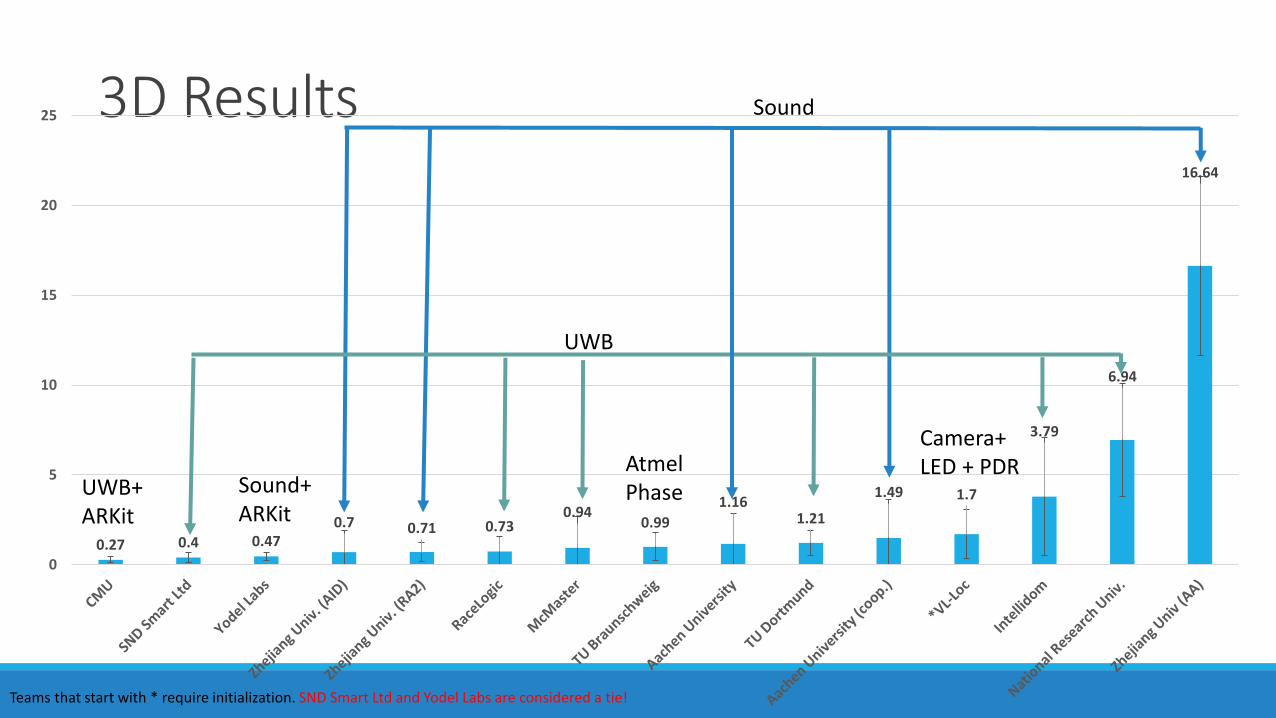
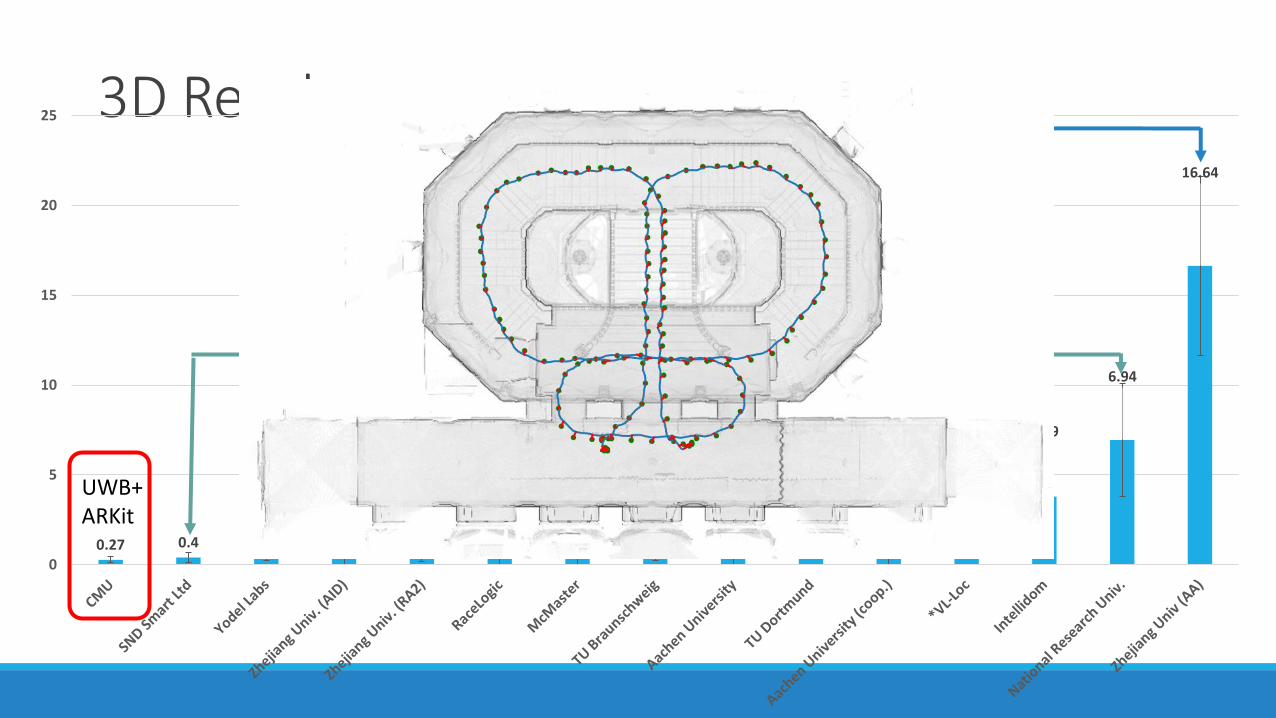
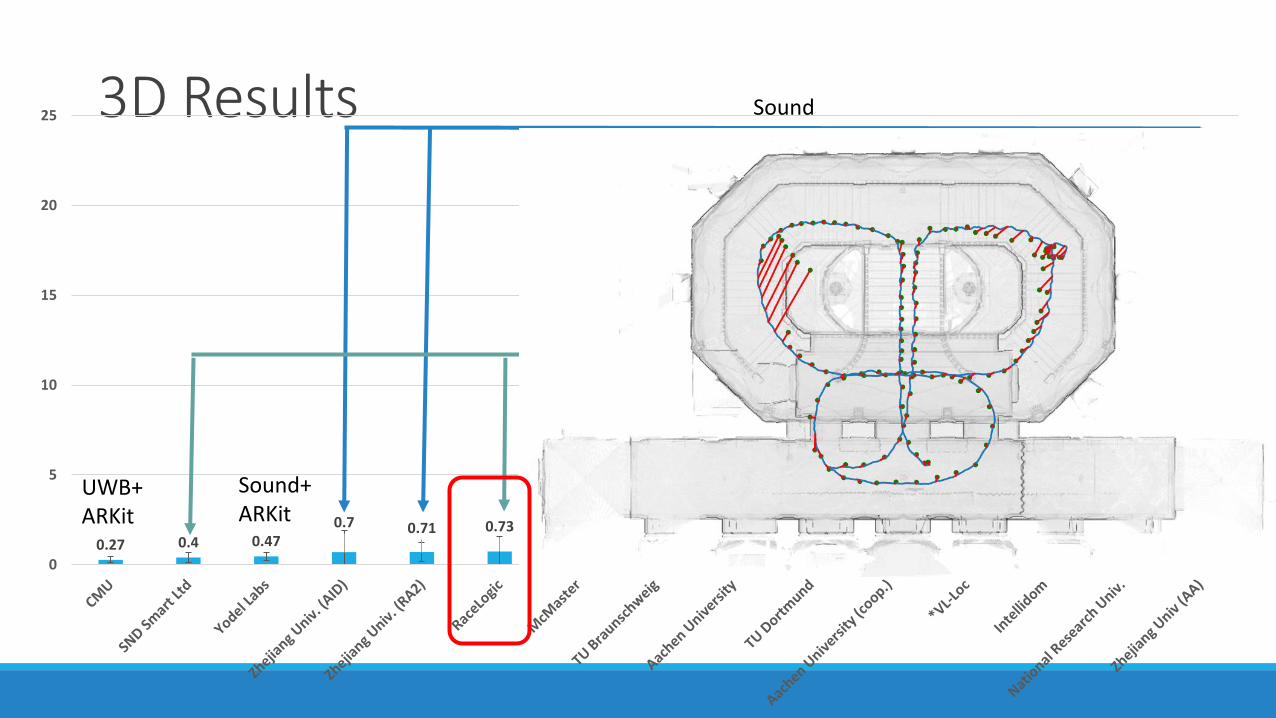
3D Results
0.27 0.4 0.470.7 0.71 0.73
0.940.99
1.161.21
1.49 1.7
3.79
6.94
16.64
0
5
10
15
20
25 Sound
AtmelPhaseSound+
ARKitUWB+ARKit
UWB
Camera+LED + PDR
Teams that start with * require initialization. SND Smart Ltd and Yodel Labs are considered a tie!
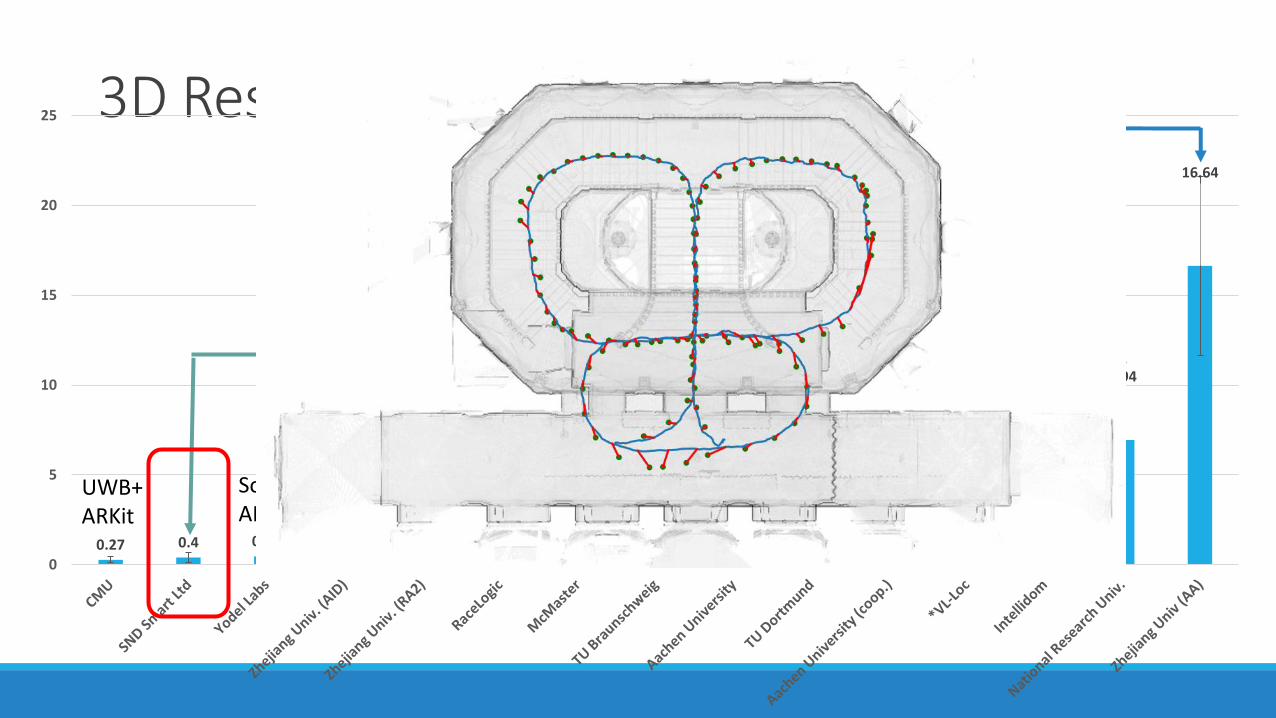
3D Results
0.27 0.4 0.470.7 0.71 0.73
0.940.99
1.161.21
1.49 1.7
3.79
6.94
16.64
0
5
10
15
20
25 Sound
AtmelPhaseSound+
ARKitUWB+ARKit
UWB
Camera+LED + PDR
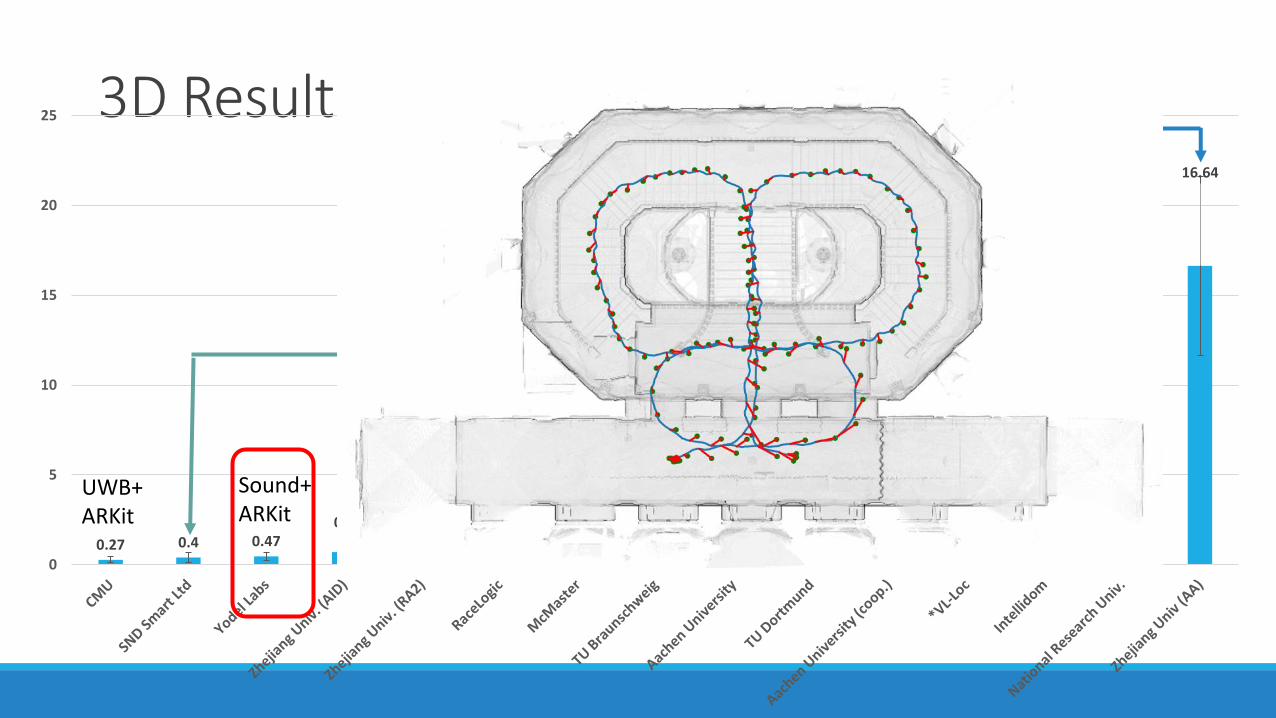
3D Results
0.27 0.4 0.470.7 0.71 0.73
0.940.99
1.161.21
1.49 1.7
3.79
6.94
16.64
0
5
10
15
20
25 Sound
AtmelPhaseSound+
ARKitUWB+ARKit
UWB
Camera+LED + PDR
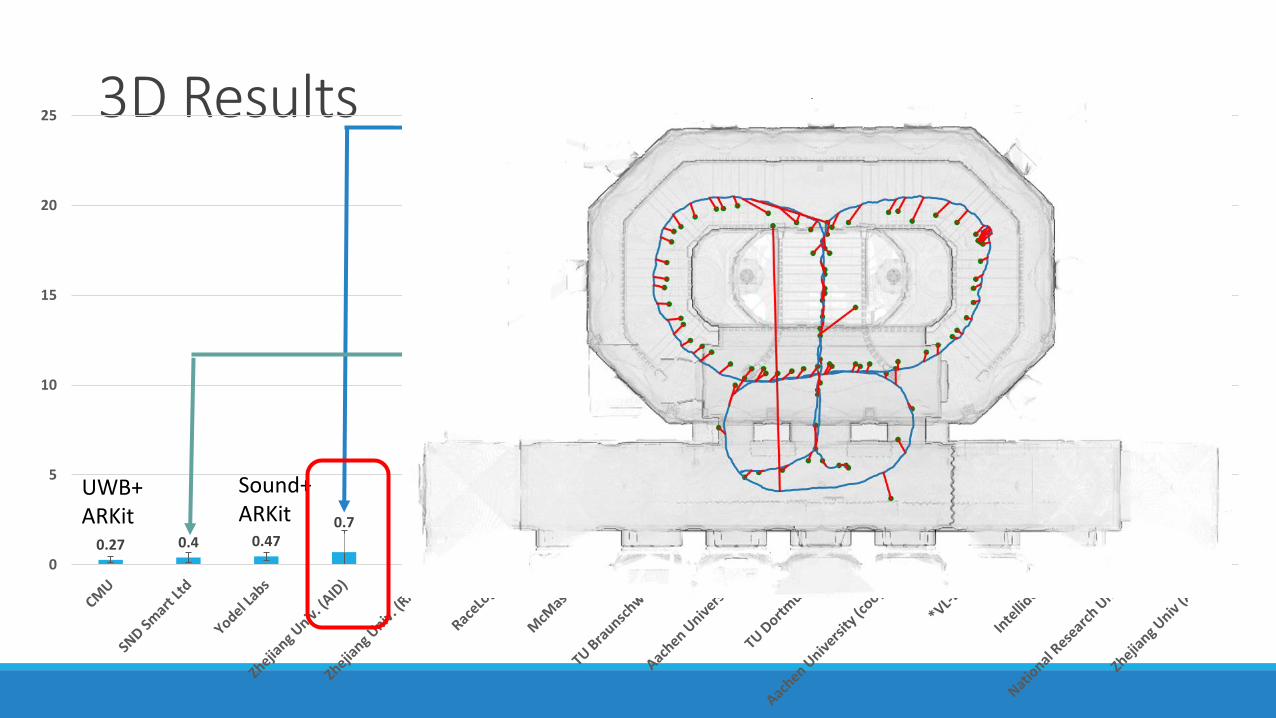
3D Results
0.27 0.4 0.470.7 0.71 0.73
0.940.99
1.161.21
1.49 1.7
3.79
6.94
16.64
0
5
10
15
20
25 Sound
AtmelPhaseSound+
ARKitUWB+ARKit
UWB
Camera+LED + PDR
3D Results
0.27 0.4 0.470.7 0.71 0.73
0.940.99
1.161.21
1.49 1.7
3.79
6.94
16.64
0
5
10
15
20
25 Sound
AtmelPhaseSound+
ARKitUWB+ARKit
UWB
Camera+LED + PDR
3D Results
0.27 0.4 0.470.7 0.71 0.73
0.940.99
1.161.21
1.49 1.7
3.79
6.94
16.64
0
5
10
15
20
25 Sound
AtmelPhaseSound+
ARKitUWB+ARKit
UWB
Camera+LED + PDR

2020: Indoor Location Competition 2.0• Completely Virtual, Open
Competition
• 30,000 traces from over 200 buildings
• $10,000 Award
• 1,170 teams participated!
• Best results: Average Location Error < 1.5m
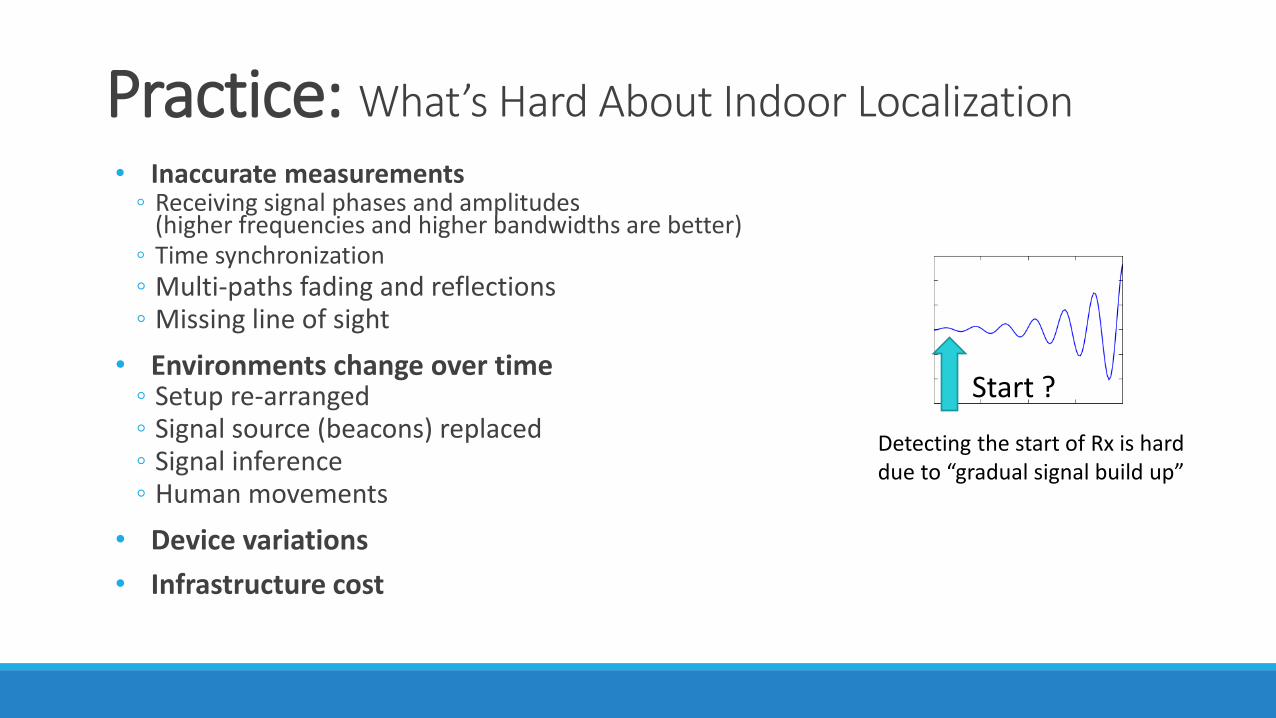
Practice: What’s Hard About Indoor Localization
• Inaccurate measurements◦ Receiving signal phases and amplitudes
(higher frequencies and higher bandwidths are better)◦ Time synchronization ◦ Multi-paths fading and reflections◦ Missing line of sight
• Environments change over time ◦ Setup re-arranged◦ Signal source (beacons) replaced◦ Signal inference◦ Human movements
• Device variations
• Infrastructure cost
Start ?
Detecting the start of Rx is hard due to “gradual signal build up”
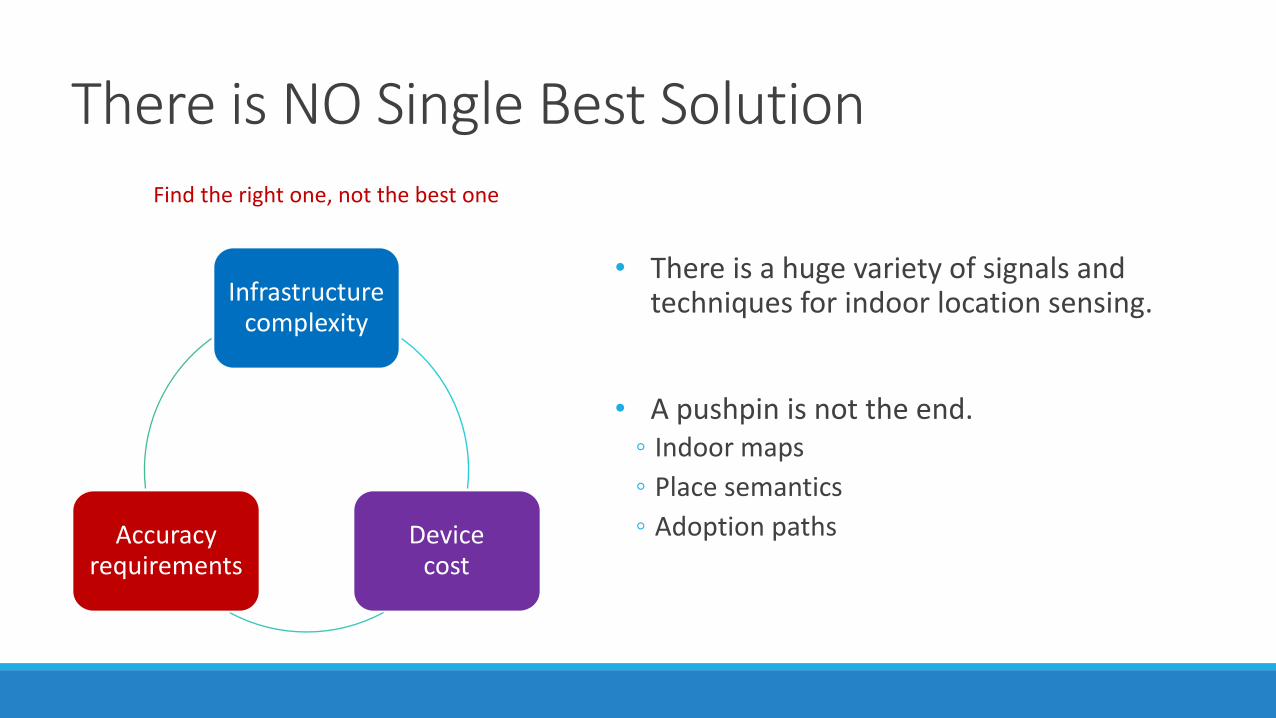
There is NO Single Best Solution
• There is a huge variety of signals and techniques for indoor location sensing.
• A pushpin is not the end.◦ Indoor maps
◦ Place semantics
◦ Adoption paths
Infrastructurecomplexity
Device cost
Accuracyrequirements
Find the right one, not the best one

IoT
Close the Loop with Value Proposition
Acknowledgements
BodhiPriyantha
DiWang
DimitriosLymberopoulos
MichelGoraczko
GeraldDeJean
JackyShen
YuanchaoShu
QiangXu