-
158 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 18, NO. 1,
JANUARY 2009
Independent Component Analysis-Based BackgroundSubtraction for
Indoor Surveillance
Du-Ming Tsai and Shia-Chih Lai
AbstractIn video surveillance, detection of moving objectsfrom
an image sequence is very important for target tracking,activity
recognition, and behavior understanding. Backgroundsubtraction is a
very popular approach for foreground segmenta-tion in a still scene
image. In order to compensate for illuminationchanges, a background
model updating process is generallyadopted, and leads to extra
computation time. In this paper, wepropose a fast background
subtraction scheme using indepen-dent component analysis (ICA) and,
particularly, aims at indoorsurveillance for possible applications
in home-care and health-caremonitoring, where moving and motionless
persons must be reli-ably detected. The proposed method is as
computationally fast asthe simple image difference method, and yet
is highly tolerable tochanges in room lighting. The proposed
background subtractionscheme involves two stages, one for training
and the other for de-tection. In the training stage, an ICA model
that directly measuresthe statistical independency based on the
estimations of joint andmarginal probability density functions from
relative frequencydistributions is first proposed. The proposed ICA
model can wellseparate two highly-correlated images. In the
detection stage, thetrained de-mixing vector is used to separate
the foreground in ascene image with respect to the reference
background image. Twosets of indoor examples that involve switching
on/off room lightsand opening/closing a door are demonstrated in
the experiments.The performance of the proposed ICA model for
backgroundsubtraction is also compared with that of the well-known
FastICAalgorithm.
Index TermsBackground subtraction, foreground segmenta-tion,
independent component analysis (ICA), indoor surveillance.
I. INTRODUCTION
I N video surveillance, detection of moving objects froman image
sequence is very important for the success ofobject tracking,
activity recognition, and behavior under-standing. Motion detection
aims at segmenting foregroundregions corresponding to moving
objects from the background.Background subtraction and temporal
differencing are twopopular approaches to segment moving objects in
an imagesequence under a stationary camera. Background
subtractiondetects moving objects in an image by evaluating the
differ-ence of pixel features of the current scene image against
thereference background image. This approach is very sensitive
toillumination changes without adaptively updating the
reference
Manuscript received July 20, 2008; revised September 04, 2008.
First pub-lished November 18, 2008; current version published
December 12, 2008. Theassociate editor coordinating the review of
this manuscript and approving it forpublication was Dr. Jenq-Neng
Hwang.
The authors are with the Department of Industrial Engineering
and Man-agement, Yuan-Ze University, Chung-Li 32003, Taiwan, R.O.C.
(e-mail:[email protected]; [email protected]).
Digital Object Identifier 10.1109/TIP.2008.2007558
background. Temporal differencing calculates the difference
ofpixel features between consecutive scene frames in an
imagesequence. It is very effective to accommodate
environmentalchanges, but generally can only recover partial edge
shapes ofmoving objects. In this study, we propose a fast
backgroundsubtraction scheme using independent component
analysis(ICA) and, particularly, aim at indoor surveillance for
possiblehome-care and health-care applications.
Hu et al. [1] categorized motion segmentation approachesas
background subtraction, temporal differencing, and opticalflow. As
aforementioned, background subtraction and temporaldifferencing are
applied to stationary cameras. Optical flowmethods can be used for
nonstationary cameras, which assignto every pixel a 2-D velocity
vector over a sequence of images.Moving objects are then detected
based on the characteristics ofthe velocity vectors. Optical flow
methods are computationallyintensive, and can only detect partial
edge shapes of movingobjects.
In order to make the background subtraction adaptive
toenvironmental changes such as illumination variations,
manybackground model updating strategies were proposed. Wren etal.
[2] developed a system called Pfinder for person segmenta-tion,
tracking and interpretation. They modeled each pixel ofthe
background over time with a single Gaussian distribution.Since the
estimation of Gaussian parameter values using thestandard
algorithms such as Expectation Maximization (EM)for each pixel in
an image is computationally prohibited, recur-sive updating using a
simple linear adaptive filter is applied forreal-time
implementation. The general form of the recursivelinear filter
formulation can be given by [3]
(1)
where the model parameter at time is updated by a local
esti-mate with a learning rate . The learning rate usedin the
linear filter is usually fixed throughout the whole sequenceof
images and obtained by try-and-error. It controls the speed atwhich
the model adapts to changes. A small value of learningrate results
in slow convergence when a Gaussian adapts tobackground changes.
Conversely, a large value of learning ratemay improve the
convergence speed, but the new backgroundmodel will not maintain
sufficient historical information of pre-vious images. The single
Gaussian updating models were alsoadopted in the [4][7] for
background subtraction.
A robust background modeling is to represent each pixel ofthe
background image over time by a mixture of Gaussians.This approach
was first proposed by Stauffer and Grimson [8],[9], and became a
standard background updating procedurefor comparison. In their
background model, the distribution of
1057-7149/$25.00 2009 IEEE
-
TSAI AND LAI: INDEPENDENT COMPONENT ANALYSIS-BASED BACKGROUND
SUBTRACTION FOR INDOOR SURVEILLANCE 159
recently observed value of each pixel in the scene is
character-ized by a mixture of several Gaussians. All parameter
values ofthe Gaussian mixture model are updated according to (1)
usinga fixed learning rate (i.e., ). The background modelcan deal
with multimodal distributions caused by shadows,swaying branches,
etc. It can handle slow lighting changes byslowly adapting the
parameter values of the Gaussians. Kaew-TraKulPong and Bowden [10]
and Lee [11] further presentedeffective background updating schemes
to improve the conver-gence rate of Gaussian mixture models. Li et
al. [12] derived atheoretical analysis for the choice of the fixed
learning rate .
Instead of modeling the feature vectors of each pixel by a
mix-ture of several Gaussians, Elgammal et al. [13] proposed to
eval-uate the probability of a background pixel using a
nonparametrickernel density estimation based on very recent
historical sam-ples in the image sequence. In order to achieve
quick adaptationto changes in the scene for sensitive detection and
low false pos-itive rates, they proposed a way to combine the
results of short-term and long-term background models for better
update deci-sion. Kernel density estimation is very computationally
inten-sive. Elgammal et al. [14] further proposed a fast
nonparametrickernel density estimation algorithm for object
tracking. By con-sidering a Gaussian kernel function, the Fast
Gauss Transform[15], [16] improves the computation of the kernel
density esti-mation from to , where is the number of sam-ples used
in the kernel model. Ianasi et al. [17] also used non-parametric
kernel density estimation for moving object detec-tion and
tracking. They proposed a fast algorithm using mul-tiresolution and
recursive density estimation with mean shiftbased mode
tracking.
The background subtraction methods reviewed above haveworked
successfully for indoor and outdoor surveillances,where the
environment may change gradually or abruptly overtime. Although
many relatively fast background modelingmethods have been proposed
for real-time implementation, theupdating process still consumes a
significant amount of totalcomputation time, and restricts the
image frame to a smallsize (e.g., 150 200). This causes a low image
resolution, andthe object of interest may appear as a tiny
foreground regionin the scene image. Besides the extra
computational time ofbackground updating, one of the limitations of
the adaptivebackground modeling is that it can wrongly absorb a
foregroundobject into the background if the object remains
motionless fora long period of time. For home-care surveillance, a
foregroundperson may watch TV or fall asleep in the living room
andremains still for long time duration. Or, for health-care
moni-toring, a patient may fall off the bed and become
unconscious.The foreground objects in such circumstances can not
bedetected with the newly updated background model. To copewith the
problem of motionless foreground objects, a referencebackground
image that contains no moving objects may berequired. Background
subtraction based on a single referenceimage is very
computationally fast. However, it is also verysensitive to
illumination changes, which deters the use of suchan approach in
many surveillance applications.
In this paper, we propose a simple and fast background
sub-traction scheme without background model updating, and yetit is
tolerable to changes in room lighting for indoor surveil-
lance using Independent Component Analysis (ICA). ICA is anovel
statistical signal process technique to extract independentsources
given only observed data that are mixtures of unknownsources
without any prior knowledge of the mixing mechanisms[18], [19]. In
the ICA model, the observed signals are generallyassumed to be a
linear mixture of the unknown sources from amixing matrix. The
estimated source signals are termed inde-pendent components (ICs),
and the inverse of the mixing matrixis called de-mixing matrix. The
de-mixing matrix is solved bymaximizing the independency of the
estimated source signals.
In this study, we use ICA to detect foreground objects in a
se-quence of images. Since the moving objects and the
stationarybackground in an image are considered to be independent,
ICAis applied to obtain the de-mixing matrix that can separate
ascene image into foreground objects and still background.
Theproposed ICA-based background subtraction scheme involvestwo
processing stages: training stage and detection stage. In
thetraining stage, two sample images, one representing the
refer-ence background and the other containing arbitrary
foregroundobjects, are selected to form the data matrix of the ICA
model.Then, an ICA algorithm is applied to solve for the
de-mixingmatrix. In the detection stage, the reference background
imageused in training and the current scene image in the
sequenceare used to form the data matrix. One of the two vectors of
thetrained de-mixing matrix is associated with foreground
objects,and is employed as a filter to extract the foreground
objects inthe scene image. Since the row vector of the de-mixing
matrix isonly of a small size of 1 2, it is very computationally
efficientin the detection stage. It then allows high frame rates
for largeimage sizes, or leaves sufficient time for high-level
processessuch as tracking and activity recognition.
The two sample images that form the data matrix in thetraining
stage basically are identical except for the relativelysmall
foreground region in the whole image. Therefore, thesetwo signals
show a high correlation coefficient. The well-knownFastICA
algorithm [20] cannot effectively recover highly- cor-related
source signals. In this study, an independent componentanalysis
model that directly measures the difference of thejoint probability
density function (PDF) and the product ofmarginal probability
density functions is proposed. The PDFsare estimated from the
relative frequency distributions, and theParticle Swarm
Optimization (PSO) algorithm is used to searchfor the best
de-mixing matrix of the ICA model. The proposedICA model can well
separate highly correlated data, and theestimated de-mixing matrix
can effectively segment foregroundobjects under illumination
changes for indoor surveillanceapplications.
The organization of this paper is as follows. Section II
firstoverviews the ICA model. The proposed ICA model that di-rectly
measures the difference between the joint PDF and theproduct of
marginal PDFs is then discussed. The PSO searchalgorithm that
determines the best de-mixing matrix from theproposed ICA model is
finally presented. Section III describestwo sets of experiments
used to demonstrate the efficiency andeffectiveness of the proposed
method, and to compare the de-tection performance with the FastICA
algorithm and the imagedifference method. The paper is concluded in
Section IV.
-
160 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 18, NO. 1,
JANUARY 2009
II. ICA-BASED BACKGROUND SUBTRACTION
A. Basic ICA ModelIn the basic ICA model [19], [20], the
observed mixture sig-
nals can be expressed as
where is an unknown mixing matrix, and represents thelatent
source signals, meaning that they cannot be directly ob-served from
the mixture signals . The ICA model describeshow the observed
mixture signals are generated by a processthat uses the mixing
matrix to mix the latent source signals .The source signals are
assumed to be mutually statistically inde-pendent. Based on the
assumption, the ICA solution is obtainedin an unsupervised learning
process that finds a de-mixing ma-trix . The matrix is used to
transform the observed mix-ture signals to yield the independent
signals, i.e., .The independent signals are used as the estimates
of the la-tent source signals . The components of , called
independentcomponents, are required to be as mutually independent
as pos-sible.
The objective of the algorithm for an ICA model is to maxi-mize
the statistical independency (non-Gaussianity) of the ICs.The
non-Gaussianity of the ICs can be measured by the negen-tropy [19],
which is given by
(2)
where is a Gaussian random vector of the same covari-ance matrix
as . is the entropy of a random vector .
The negentropy is always non-negative and is zero if and onlyif
has a Gaussian distribution. It is well justified as an esti-mator
of the non-Gaussianity of the ICs. Since the problem inusing
negentropy is computationally very difficult, an approxi-mation of
negentropy is proposed as follows:
(3)
where is a Gaussian variable of zero mean and unit variance.is a
nonquadratic function, which is generally given by
or with. The FastICA algorithm [21], [22] has been one of
the
most popular optimization methods in ICA, which is based ona
fixed-point iteration scheme for finding a maximum of
thenegentropy.
B. Proposed ICA ModelIn order to separate foreground objects
from the background
in a scene image, we need at least two sample images to
con-struct the mixture signals in the ICA model. Let the sample
im-ages be of size . Each sample image is organized as arow vector
of dimensions, where . Denote by
the reference background image con-taining no foreground
objects, andthe foreground image containing an arbitrary foreground
objectin the stationary background. In the training stage of the
pro-posed background subtraction scheme, the ICA model is
givenby
where
ICA aims to find a 2 2 de-mixing matrix of the data ma-trix such
that one of the two row vectors in the estimatedsource signals will
contain only the foreground object in auniform region without the
detailed contents of the background.The 1 2 row vector associated
with the source signal of theforeground object in the de-mixing
matrix is then used inthe detection stage to separate foreground
objects in each sceneimage of the video sequence.
The two sample images and in the mixture data matrixcan be
highly correlated since both contain a large portion of
the same stationary background region. The conventional Fas-tICA
algorithm cannot effectively separate source signals whichare
correlated in nature. In this study, the statistical indepen-dence
is directly employed to form the objective of the ICAmodel, i.e.,
if two random variables and are mutuallyindependent, the joint PDF
can be factorized as
where is the marginal PDF of source signal ,and . Therefore, the
objective of the proposedICA model for background subtraction is to
minimize the abso-lute difference between the joint PDF and the
product of mar-ginal PDFs. That is
(4)
The difficulty of applying the definition of statistical
indepen-dence in (4) is that we have no prior knowledge on the
joint andmarginal PDFs. Since the ICA model applied to
backgroundsubtraction in this study involves only two source
signals offoreground and background, the combination of fallswithin
a manageable number. The joint and marginal PDFs aresimply
estimated from the relative frequency of the discrete ob-served
data. We start with the construction of a histogram foreach
individual source signal (i.e., marginal PDF). The range ofsignal
values covered by the data is initially broken up intodisjoint
adjacent intervals, each of the same width. The Sturgesrule [23] is
used as a guideline for choosing the initial numberof
intervals.
Given intervals in each of the two marginal density
dis-tributions, the number of 2-D grids in the joint density
distri-bution becomes a large amount of . When most of the
gridshave zero-entries in the joint density distribution, the
estima-tion of the joint PDF becomes very unstable and leads to
false
-
TSAI AND LAI: INDEPENDENT COMPONENT ANALYSIS-BASED BACKGROUND
SUBTRACTION FOR INDOOR SURVEILLANCE 161
separation of source signals. In order to prevent zero
probabili-ties in most of the grids in the joint PDF, the interval
with zeroentries in the marginal density distribution is merged
with itsneighboring intervals. The interval merging process is
repeateduntil all resulting intervals of each marginal density
distributionhave sufficient entries. In this study, we use 20
entries as thethreshold. By the end of the merge, each interval in
individualmarginal density distributions may have different widths.
Theresulting interval widths used for estimating marginal PDFs
arealso used to estimate the joint PDF.
Let be the -th interval of source signal and, where is the
resulting number of intervals
for source signal . Also let be the resulting number ofentries
in the interval . The marginal PDF of source signal
at interval is estimated by
The joint PDF of and at grid is estimated by
where is the number of entries falling in the 2-Dgrid is the th
merged interval of sourcesignal for .
For a given de-mixing matrix , the source signals andare
estimated by
and their joint and marginal PDFs can be estimated
accordinglyfrom the relative frequency distributions. The objective
of theproposed ICA model is, therefore, reformulated as
(5)The objective function of the ICA model defined in (5) is
notdifferentiable. In this study, we, therefore, propose a
stochasticoptimization procedure based on the particle swarm
optimiza-tion (PSO) algorithm to determine the de-mixing matrix
thatminimizes the objective .C. PSO Procedure
Particle swarm optimization is an evolutionary
computationtechnique originally developed by Kennedy and Eberhart
[24].PSO resembles the social interaction from a school of
flyingbirds. Individuals in a group of flying birds are evolved by
co-operation and competition among the individuals
themselvesthrough generations [25]. Each individual, named as a
par-ticle, adjusts its flying according to its own flying
experienceand its companions flying experience. Each particle with
itscurrent position represents a potential solution to the
problemin hand. In this study, each particle is treated as a point
in a 4-Dspace since the de-mixing matrix is of size 2 2.
In PSO, a number of particles, which simulate a group offlying
birds, are simultaneously used to find the best fitness inthe
search space. At each iteration, every particle keeps track of
its personal best position by dynamically adjusting its flying
ve-locity. The new velocity is evaluated by its current velocity
andthe distances of its current position with respect to its
previousbest local position and the global best position. After a
sufficientnumber of iterations, the particles will eventually
cluster aroundthe neighborhood of the fittest solution.
Let the -th particle be represented as. The best previous
position,
i.e., the position giving the best fitness value, of particle
isrecorded and represented as .Assume there are a total of
particles in the PSO. Let
denote by the best particlethat gives the current optimal
fitness value among allthe particles in the population. The rate of
the positionchange, i.e., the velocity, for particle is represented
by
. Each particle moves over thesearch space with a velocity
dynamically adjusted according toits historical behavior and its
companions. The velocity andposition of a particle are updated
according to the followingequations [24]:
(6a)
(6b)where and are two random numbers in the rangebetween 0 and
1; and are two positive constants.
The two positive constants and are the weights used toregulate
the acceleration of self-cognition (a local best) and so-cial
interaction (a global best). Kennedy and Eberhart [24], andShi and
Eberhart [25] suggested since they makethe weights for cognition
and social parts to be 1 on average.They are also the values
adopted in this study. The velocityequation in (6a) calculates the
particles new velocity in eachdimension according to its previous
velocity and the distancesof its current position from its own best
experience (i.e., posi-tion) and the groups best experience. Then
the particle movestoward a new position according to the position
update equationin (6b). The performance of each particle is
measured by thefitness value, i.e., the objective function value in
(5). When allparticles are evaluated, the global best position is
updated by
The procedure is repeated for a sufficient number of
interations,and the final global best position is used as the
de-mixingmatrix , which will be used in the detection stage for
sepa-rating foreground objects from the background.
Experiments have shown that the PSO search process con-verges
fast after 150 iterations for a set of numerous test
samplesevaluated in this study. Therefore, 200 iterations are
consideredto be sufficient for our problem. Given the objective of
mini-mizing the difference between the joint PDF and the product
ofmarginal PDFs, the PSO algorithm with a moderate number
ofiterations can search for an intermediate de-mixing matrix
thatreduces the fitness value, but not a de-mixing matrix that
re-sults in a zero fitness value, i.e., two completely
independent
-
162 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 18, NO. 1,
JANUARY 2009
source signals. Therefore, the proposed ICA model with thePSO
search procedure can recover two highly correlated sourcesignals.
The fixed-point algorithm for the negentropy model isconverged fast
and finds straightly a de-mixing matrix that sep-arates two mixture
signals into two independent signals, eventhough they are highly
correlated in nature. Note that when theproposed ICA model is
solved by the PSO algorithm with anextremely large number of
iterations (e.g., 5000 or more), theestimated source signals are
then similar to those of the Fas-tICA algorithm.
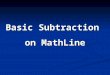
D. Foreground DetectionTo demonstrate the proposed ICA model for
background
subtraction, Fig. 1(a) and (b) presents a reference
backgroundimage and a scene image containing a foreground
object,respectively. The correlation coefficient between the two
im-ages is 0.90. Let be the 2-D image of size . It isfirst reshaped
as a vector by the following transformation:
The de-mixing matrix obtained from the PSO search ofthe proposed
ICA model is given by
. Therefore, the sourcesignals can be estimated by
The resulting source signal andin vector form is converted back
to a 2-D image
by
and
In order to visualize the resulting value of in a
gray-levelimage, is transformed by
(7)
where and are the mean gray value and standard de-viation of the
reference background image
is a conversion constant that sets up the rangeof the converted
gray values; it is given by in this study.
To segment foreground objects in the estimated source imagefor
some or 2, an adaptive threshold is used to
binarize the image. The threshold for segmentation in imageis
given by a simple statistical control limit
(8)
where and are the mean and standard deviation of image, and is
the control constant, which is given by 1.5 in
this study. If
Fig. 1. Foreground and background separation from the proposed
ICAmodel (training stage): (a) reference background image ; (b)
sceneimage containing a walking person; (c) separated background
imagefrom ; (d) separated foreground image from ; (e) resulting
binary image of (d).
then pixel is a background point and shown in white inthe binary
image. Otherwise, it is classified as a foregroundpoint and shown
in black in the segmented image. Fig. 1(c)and (d) depicts the
estimated source images ,which are respectively derived from the
de-mixing vectors
and . It isapparent from the separation results that de-mixing
vectorcorresponds to the foreground object, and vector is
asso-ciated with the reference background. The estimated
sourceimage in Fig. 1(d) clearly shows the foreground objectwithout
the details of the reference image. The foregroundobject can,
therefore, be segmented easily in the estimatedsource image with
simple thresholding, as seen in Fig. 1(e).
The de-mixing vector corresponding to foreground objectsis then
used in the detection stage to separate foreground ob-jects in each
scene image of a video sequence. The resultingde-mixing vector used
for foreground segmentation must havethe two elements with opposite
signs. The de-mixing vector as-sociated with the reference
background is discarded for furtherconsideration in the detection
stage.
In the detection stage, the reference background image
isretained. A scene image at time frame in a video sequencealong
with the background image are used to construct thedata matrix .
Let be the de-mixingvector corresponding to foreground objects in
the training stage.Then the sole estimated source image is given
by
Once the source image is obtained, it can be converted to
agray-level image using (7) for visual display, and thresholded toa
binary image using (8). The de-mixing vector is obtainedfrom the
training stage, and the ICA modeling and optimizationare not
required in the detection stage. It is, therefore, very
com-putationally fast to derive the estimated source image, and
todetect foreground objects with or without motions in the
sceneimage.
The 2-D de-mixing vector with opposite signsof elements, i.e., ,
can be treated as a convo-lution filter for image difference. It
assigns weight to the2-D reference background image , and weight to
the
-
TSAI AND LAI: INDEPENDENT COMPONENT ANALYSIS-BASED BACKGROUND
SUBTRACTION FOR INDOOR SURVEILLANCE 163
2-D scene image . The response amplitude indicates
thepresence/absence of foreground objects in the scene. If the
mag-nitude of the weighted differenceis distinctly large, then it
shows the strong evidence thatis a foreground point.
III. EXPERIMENTAL RESULTSThis section presents the experimental
results from two sets of
indoor image sequences to evaluate the performance of the
pro-posed ICA-based background subtraction method. The test im-ages
in the experiments were 150 200 pixels wide with 8-bitgray levels.
In the PSO search algorithm, the required param-eters were set up
as follows: the number of particles was 20,the weights , and the
maximum number of itera-tions was 200. In the detection stage, the
constant in (7) forconverting ICA signal values to gray values was
set at 0.5, andthe control constant in (8) for binary thresholding
was givenby 1.5 for all scene images. The implementation of the
pro-posed method runs at a very fast speed of 142 fps (frames
persecond) for 150 200 gray-level images on a personal computerwith
an AMD 64-bit 1.8-GHz processor. In the experiments, wealso compare
the performance of the proposed method with theFastICA algorithm,
and the simple image difference method.For a fair comparison, the
same parameter values of andin (7) and (8) were applied for the
FastICA and image differ-ence methods, as well. To show the primary
performance ofthe proposed method, postprocessing such as noise
cleaning andconnected component analysis were not introduced to the
seg-mented images.
A. Single Reference BackgroundThe first test sample is a scene
room with a large window.
The room has three sets of fluorescent lights on the ceiling.
Itis not uncommon that a room will have all lights on, all
lightsoff, or partial lights in daily life. The illumination in the
room is,therefore, affected by indoor lights and outdoor sunlight
throughthe window, and the illumination could be changed
graduallyor suddenly. Fig. 2(a) and (b) shows, respectively, a
referencebackground image of the room , and a scene image
containinga walking person , where all three sets of fluorescent
lightswere turned on. Note that the window region is brighter
thanthe remaining area in the image. Fig. 2(c) and (d) shows
theestimated source images from the respective de-mixing vector
and . It is vis-ibly shown in Fig. 2(d) that corresponds to the
foreground,which distinctly preserves the foreground object without
the de-tailed contents of the reference background.
In the detection stage of the first test sample, the examplecame
from a scenario that a person walked in the room, in whichall three
sets of lights were originally turned on, then one set ofthe
ceiling lights was switched off for a period of time, and fi-nally
two sets of lights were turned off. The gray-level imagesshown in
the first column (a) of Fig. 3 display the original se-quence at
varying frames. The video images were taken at 5 fps.The symbol
marked in the figure represents the frame numberin the image
sequence.
Prior to frame 25 , all three sets of lights wereturned on.
Images between frames 65 and 88 were the results
Fig. 2. Experimental results on a room with a large window
(training stage):(a) reference background image; (b) scene image
containing a person whoseclothes have similar intensities to the
background wall; (c) separated back-ground image from ; (d)
separated foreground imagefrom .
Fig. 3. Experimental results on a room with a large window
(detection stage):The left-most column (a) shows the discrete scene
images in a video sequencetaken at 5 fps. The symbol indicates the
frame number in the sequence.Columns 2, 3, and 4 (b)(d) give the
detected foregrounds from the proposedmethod, FastICA, and the
image difference method, respectively.
of switching off one set of lights. After frame 153, two sets
oflights were turned off. Note that the two images at frames 65
and153 do not present any foreground objects, and they were
takenunder dramatic changes in scene lighting. The second and
thirdcolumns (b) and (c) of Fig. 3 are the separation results,
shown
-
164 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 18, NO. 1,
JANUARY 2009
as gray-level images using (7), from the proposed method andthe
FastICA algorithm, respectively. The fourth column (d) ofFig. 3 is
the difference values, also shown as gray-level imagesusing (7),
from the simple image difference method.
Given the training sample images in Fig. 2(a) and (b),the
FastICA algorithm generates a de-mixing vector of
, which is very close to the simple imagedifference method that
uses as the filter. From thesecond column (b) of Fig. 3, it is
apparent that the proposedmethod can distinctly enhance the walking
person and removethe background details in the separated images,
even with largechanges in illumination. The FastICA algorithm and
the imagedifference method only work well under fixed lighting.
Whenthe room lighting is distinctly different from the one in
thereference background image, both the moving person and
thebackground details are presented in the resulting images, asseen
in the third and fourth columns of Fig. 3.
Fig. 4 shows the binarization results from the images inFig. 3.
The first column of Fig. 3 is repeated in the first column(a) of
Fig. 4 for visual evaluation of the segmentation results.The
second, third, and fourth columns (b)(d) of Fig. 4 are
thethresholding results from the proposed method, the
FastICAalgorithm, and the image difference method, respectively.It
can be seen from the binary images that the FastICA andthe image
difference methods detect the bright window as aforeground object,
and the moving person cannot be identifiedas a foreground object
when she passed through the window.The proposed method can
effectively detect the walking personeven under distinct changes in
room lighting.
B. Multiple Reference BackgroundsIn indoor surveillance, it is
quite common to have a door
widely open, completely closed, or left half open in a
sceneroom. Or, a person may be opening or closing a door whenhe/she
walks into or out of the room. One may encounter thesame situation
when opening or closing a curtain across thewindow. A door or a
curtain is a nonstationary backgroundobject, and should not be
identified as a foreground object inbackground subtraction. The
problem of such nonstationarybackground objects can be coped with
multiple reference back-grounds. The second indoor surveillance
test sample involves ascene room with opening and closing of a
door. To apply theproposed method for background subtraction, we
first selecttwo reference background scenes and , one having
thedoor widely open and the other having the door fully closed.
Wethen individually train two ICA models using the two
referencebackground images, and obtain two de-mixing vectorsand
that can be used to separate foreground objects in theimage. In the
detection stage, a scene image in the videosequence is individually
convoluted with and by
and
Let and be the respective binary images of and, where a
foreground pixel and a background pixel are, re-
spectively, given by the values of 1 and 0. Given a scene
imagecontaining a half-open door, or an opening/closing operation
of
Fig. 4. Thresholding results of the separated foreground images
in Fig. 3:(a) original scene images; (b)(d) binary results of the
recovered images inFig. 3(b)(d), respectively.
the door, we expect that the pixels of the nonstationary door
willfall within either the reference background with a widely
opendoor, or the one with a fully closed door. A true foreground
pixelshould be present in both binary images and . There-fore,
foreground objects are segmented by the intersection of
and , i.e.,
Fig. 5 show two sets of mixture data used for training theICA
models. The first set in Fig. 5(a1) and (b1) involves thebackground
scene with the door completely closed, and thesecond set in Fig.
5(c1) and (d1) contains the background scene
with the door widely open. Fig. 6(a1)(c1) shows threescene
images for foreground segmentation, in which (a1) con-tains a
person walking through a widely open door, (b1) involvesa man
passing through a half-open door, and (c1) is the back-ground scene
with a half-open door. Fig. 6(a2)(c2) gives thebinary results from
the first reference background , andFig. 6(a3)(c3) shows the binary
results from the secondreference background . Fig. 6(a4)(c4) shows
the intersec-tion results of and . It can be observed from Fig. 6
that
-
TSAI AND LAI: INDEPENDENT COMPONENT ANALYSIS-BASED BACKGROUND
SUBTRACTION FOR INDOOR SURVEILLANCE 165
Fig. 5. Training results on a living room with a door
opening/closing:(a1) reference background image with the door
completely closed;(b1) foreground scene image with respect to (a1);
(c1) reference backgroundimage with the door widely open; (d1)
foreground scene image withrespect to (c1); (a2)(d2) separated
backgrounds and foregrounds of (a1)(d1).
Fig. 6. Detection results of door opening/closing scenario:
(a1)(c1) scene im-ages; (a2)(c2) resulting binary images from
reference background inFig. 5(a1); (a3)(c3) resulting binary images
from reference background in Fig. 5(c1); (a4)(c4) intersection
results of and .
the foreground object can be reliably segmented without
pre-senting the nonstationary door as a foreground region.
C. Effect of Varying Foreground ObjectsIn this subsection, we
evaluate the effect of object sizes and
intensity contrast for foreground segmentation. Fig. 7(a) and(b)
shows the reference background and the foreground imageused in the
training process. The foreground image contains atiny girl wearing
white clothes similar to the background. Theresulting de-mixing
vector is . Fig. 7(c)(e)displays the detection results of the same
girl walking towardthe still camera. The object sizes in the scene
images have beendistinctly enlarged when the object gets closer to
the camera.Fig. 7(f)(h) further demonstrates the detection results
of a manwearing black clothes and walking away from the camera.
Theintensity of the foreground object in the scene image is
dis-tinctly different from the one in the training image. The
pro-posed method also reliably detects the moving object.
In the experiments, we have also evaluated a set of the
reversetest images, where the man wearing black clothes is used as
the
Fig. 7. Detection results of varying foreground objects: (a)
reference back-ground image; (b) training scene image; (c1)(h1)
test scene images; (c2)(h2)detected foreground images of (c1)(h1);
(c3)(h3) segmented foreground ob-jects of (c2)(h2),
respectively.
training foreground image and the girl wearing white clothesis
used as the scene images. The resulting de-mixing vectoris .
Similar results as the ones in Fig. 7 arealso detected. The
detection results reveal that the proposed ICAmodel with the PSO
search generates similar de-mixing vectors,and the de-mixing
vectors can be reliably used to detect variousforeground objects,
regardless of changes in object sizes and ob-ject intensities.
In addition, there is an interesting finding from the
detectionresults in Fig. 7. When the foreground object is
relatively verysmall in the scene image, the proposed method is
sensitive toobject shadows, as seen in Fig. 7(c3) and (h3). While
the objectsize in the scene image gets larger, the shading effect
becomesinsignificant, as seen in Fig. 7(d3) and (g3).
D. Analysis of the Demixing VectorAs aforementioned, the 2-D
demixing vector
with from the proposed ICA model can be usedas a convolution
filter for the reference background and the
-
166 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 18, NO. 1,
JANUARY 2009
scene image. The conventional image difference method canalso be
treated as a convolution filter. Foreground ob-jects generally have
more distinct gray-levels with respect tothe background. Both image
difference method and the pro-posed method can well detect
foreground objects in an imagesequence, but the image difference
method is more sensitiveto illumination changes. This is because
the filter re-sults in a more distinct gray-level difference,
compared to thatof the proposed filter . In the experiments, wehave
evaluated numerous test sample images with varying ref-erence
backgrounds. The proposed ICA model with the PSOsearch consistently
converges to a de-mixing vector similar to
. Therefore, this vector can be treated as anoptimal filter for
background subtraction.
Let and be the gray levels at pixel coordi-nates of the
reference background image and the sceneimage at frame ,
respectively. If
(9)
then the response amplitude from the filter is distinctlylarger
than that from the proposed filter and,therefore, is more sensitive
to noise and illumination changes.In the experiments, the filter is
given byfrom the proposed ICA model. It indicates if the
gray-levelratio [the left-hand side of (9)] is less than 0.665 [the
right-handside of (9)], the filter will generate a more
significantamount of gray-level difference. Since most of the
illuminationchanges in a scene background generally have a
gray-levelratio smaller than 0.665, i.e., larger gray-level
difference, itwill detect both foreground objects and regions with
significantillumination changes as foreground. This is why the
brightwindow is intensified in Fig. 3(d) and detected as a
foregroundobject in Fig. 4(d) when the simple image difference
method isapplied for foreground segmentation.
IV. CONCLUSIONBackground subtraction is a widely used approach
for de-
tecting foreground objects in videos from a static camera.
Indoorsurveillance applications such as home-care and
health-caremonitoring, a motionless person should not be a part of
thebackground. A reference background image without movingobjects
is, therefore, required for such applications. In thispaper, we
have presented an ICA-based background subtractionscheme for
foreground segmentation. The proposed ICA modelis based on the
direct measurement of statistical independencythat minimizes the
difference between the joint PDF andthe product of marginal PDFs,
in which the probabilities aresimply estimated from the relative
frequency distributions.The proposed ICA model well performs the
separation ofhighly-correlated signals.
The de-mixing vector derived from theproposed ICA model can be
considered as an optimal filter forbackground subtraction under
arbitrary reference backgrounds.Since the de-mixing vector is only
of a small size of 1 2, itscomputation is as fast as the image
difference method. Compu-tation times in the detection stage of the
proposed method areonly 0.007 seconds (i.e., 142 fps) for a small
150 200 image,
and 0.09 seconds (i.e., 11 fps) for a large 640 480 image onan
AMD 64-bit 1.8-GHz personal computer.
As seen in the experimental results, a part of the personsbody
was missing due to the camouflage foreground ingray-level images.
In order to eliminate the effect of camou-flage, color may provide
more information to discriminate aforeground object from its
surrounding background. The ICAmodel that separates vector-valued
signals in RGB color imagesis worth further investigation.
REFERENCES[1] W. Hu, T. Tan, L. Wang, and S. Maybank, A survey
on visual surveil-
lance of object motion and behaviors, IEEE Trans. Syst., Man,
Cybern.C, Appl. Rev., vol. 34, no. 3, pp. 334352, Aug. 2004.
[2] C. R. Wren, A. Azarbayejani, T. Darrell, and A. P. Pentland,
Pfinder:Real-time tracking of the human body, IEEE Trans. Pattern
Anal.Mach. Intell., vol. 19, no. 7, pp. 780785, Jul. 1997.
[3] D.-S. Lee, Online adaptive Gaussian mixture learning for
video ap-plications, in Proc. ECCV Workshop SMVP, Prague, Czech
Republic,May 2004, pp. 105116.
[4] T. Olson and F. Brill, Moving object detection and event
recognitionalgorithm for smart cameras, in Proc. DARPA Image
UnderstandingWorkshop, 1997, pp. 159175.
[5] C. Eveland, K. Konolige, and R. C. Bolles, Background
modelingfor segmentation of video-rate stereo sequences, in Proc.
IEEE Conf.Computer Vision and Pattern Recognition, 1998, pp.
266271.
[6] T. Kanade, R. Collins, A. Lipton, P. Burt, and L. Wixson,
Advancesin cooperative multi-sensor video surveillance, in Proc.
DARPA ImageUnderstanding Workshop, Nov. 1998, vol. 1, pp. 324.
[7] A. Cavallaro and T. Ebrahimi, Video object extraction based
on adap-tive background and statistical change detection, in Proc.
SPIE VisualCommunications and Image Processing, Jan. 2001, pp.
465475.
[8] C. Stauffer and W. E. L. Grimson, Adaptive background
mixturemodels for real-time tracking, in Proc. IEEE Conf. Computer
Visionand Pattern Recognit., 1999, vol. 2, pp. 246252.
[9] C. Stauffer and W. E. L. Grimson, Learning patterns of
activity usingreal-time tracking, IEEE Trans. Pattern. Anal. Mach.
Intell., vol. 22,no. 8, pp. 747757, Aug. 2000.
[10] P. KaewTraKulPong and R. Bowden, An improved adaptive
back-ground mixture model for real-time tracking with shadow
detection,in Proc. 2nd European Workshop on Advanced Video Based
Surveil-lance Systems, Kingston, U.K., Sep. 2001, pp. 149158.
[11] D.-S. Lee, Effective Gaussian mixture learning for video
backgroundsubtraction, IEEE Trans. Pattern Anal. Mach. Intell.,
vol. 27, no. 5,pp. 827832, May 2005.
[12] L. Li, W. Huang, I. Y.-H. Gu, and Q. Tian, Statistical
modeling ofcomplex backgrounds for foreground object detection,
IEEE Trans.Image Process., vol. 13, no. 11, pp. 14591472, Nov.
2004.
[13] A. Elgammal, R. Duraiswami, D. Harwood, and L. S. Davis,
Back-ground and foreground modeling using nonparametric kernel
densityestimation for visual surveillance, Proc. IEEE, vol. 90, no.
7, pp.11511163, Jul. 2002.
[14] A. Elgammal, R. Duraiswami, and L. Davis, Efficient kernel
densityestimation suing the Fast Gauss Transform with applications
to colormodeling and tracking, IEEE Trans. Pattern Anal. Mach.
Intell., vol.25, no. 11, pp. 14991504, Nov. 2003.
[15] L. Greengard and J. Strain, The fast Gauss transform, SIAM
J. Sci.Statist. Comput., vol. 12, no. 1, pp. 7994, 1991.
[16] C. Yang, R. Duraiswami, N. A. Gumerov, and L. Davis,
Improved fastGauss transform and efficient kernel density
estimation, in Proc. IEEEInt. Conf. Computer Vision, Nice, France,
Oct. 2003, pp. 464471.
[17] C. Ianasi, V. Gui, C. I. Toma, and D. Pescaru, A fast
algorithm forbackground tracking in video surveillance, using
nonparametric kerneldensity estimation, Facta Universitatis Ser.:
Elect. Energ., vol. 18, no.1, pp. 127144, Apr. 2005.
[18] T. W. Lee, Independent Component Analysis: Theory and
Applica-tion. Boston, MA: Kluwer, 1998.
[19] A. Hyvarinen, J. Karhunen, and E. Oja, Independent
Component Anal-ysis. New York: Wiley, 2001.
[20] A. Hyvarinen and E. Oja, Independent component analysis:
Algo-rithms and applications, Neural Netw., vol. 13, pp. 411430,
2000.
[21] A. Hyvarinen and E. Oja, A fast fixed-point algorithm for
independentcomponent analysis, Neural Comput., vol. 9, pp.
14831492, 1997.
-
TSAI AND LAI: INDEPENDENT COMPONENT ANALYSIS-BASED BACKGROUND
SUBTRACTION FOR INDOOR SURVEILLANCE 167
[22] J. Hurri, H. Gavert, J. Sarela, and A. Hyvarinen, FastICA
Package, 2004[Online]. Available:
http://www.cis.hut.fi/projects/ica/fastica/
[23] D. C. Hoaglin, F. Mosteller, and J. W. Tukey, Understanding
Robustand Exploratory Data Analysis. New York: Wiley, 1983, pp.
2324.
[24] J. Kennedy and R. Eberhart, Particle swarm optimization,
inProc. IEEE Int. Conf. Neural Networks, Perth, Australia, 1995,
pp.19421948.
[25] Y. Shi and R. Eberhart, A modified particle swarm
optimizer, in Proc.IEEE Int. Conf. Evolutionary Computation,
Anchorage, AK, 1998, pp.6973.
Du-Ming Tsai received the B.S. degree in industrialengineering
from the Tunghai University, Taiwan,R.O.C., in 1981, and the M.S.
and Ph.D. degrees inindustrial engineering from Iowa State
University,Ames, in 1984 and 1987, respectively.
From 1988 to 1990, he was a Principal Engineerof Digital
Equipment Corporation, Taiwan branch,where his work focused on
process and automationresearch and development. Currently, he is a
Pro-fessor of industrial engineering and managementat the Yuan-Ze
University, Taiwan. His research
interests include automated visual inspection, texture analysis,
and visualsurveillance.
Shia-Chih Lai received the B.S. degree in statisticsfrom the
Tunghai University, Taiwan, R.O.C., in2004, and the M.S. degree in
industrial engineeringand management from the Yuan-Ze
University,Taiwan, in 2006.
She is currently a researcher with Delta Elec-tronics, Inc.,
Taiwan.