Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON EDUCATION, VOL. 38, NO. 4, NOVEMBER 1995 36 1
Including the Effects of Component Tolerances in the Teaching of Courses in Introductory Circuit Design
Michael F. Kavanaugh, Senior Member, IEEE
Abstract- With the emphasis upon design in electrical and electronics curriculums, the need for coverage in circuit design courses on how manufacturer’s tolerances on resistors and ca- pacitors will affect the circuit’s response is obvious. This paper develops an analytical procedure useful for the determination of these tolerances that is suitable for use in introductory classes in active and passive circuit analysis and design. The procedure allows the determination of the proper manufacturer’s tolerances on the passive components such that a given tolerance on a design parameter will not be exceeded.
I. INTRODUCTION N MOST introductory classes in active and passive circuit I analysis and design, students are taught the necessity for
specifying both the resistance and wattage for resistors and the capacitance and dc working voltage for capacitors. For many designs, these two quantities are sufficient. However, in those situations where a design parameter is to be held to a given tolerance, it is also necessary to determine the appropriate tolerances on the resistance and/or capacitance values such that the design parameter tolerance will not be exceeded.
Other authors have explored the effect on design parameters caused by component changes due to aging and environment [ 1 1, [ 2 ] , and some have developed relatively complicated methods to determine the effect component tolerances have on design parameters [3]-[6]. However, none have addressed the question of what component tolerances are necessary to assure that a given design parameter will not be exceeded after the design has been completed. Two authors, [5] and [6], address the question of using tolerances in the redesign of a circuit so as to meet certain manufacturing conditions. However, again, neither addresses the question of how to determine the proper component tolerances such that the design parameter tolerance will be maintained after the design has been completed. In addition, neither offers an approach suitable for use in an introductory course in circuit analysis and/or design. This topic is also not covered to any depth in the currently popular texts for circuit analysis or design.
11. COMPONENT TOLERANCES Due to manufacturing processes, the actual value of a
resistor or a capacitor will be different from the value marked on the body of the component. The absolute value of the max- imum measured difference found in a given lot of components
Manuscript received June 7, 1993; revised April 4, 1994. The author is with the Department of Technology, Southwest Missouri State
IEEE Log Number 9413583. University, Springfield, MO 65804 USA.
divided by the marked value and multiplied by 100% defines the percentage tolerance on the value of the components in that lot. Common percentage tolerances are 1%, 5%, lo%, and 20% (some capacitor values can be obtained with a 2% tolerance). Percentage values less than 1% are available; however, the cost of such components increases significantly beyond that of components in the 1% to 20% range.
The remainder of this paper develops a general procedure for determining the component value tolerances necessary to maintain a design parameter to within a given tolerance. The procedure is illustrated using several examples and utilizes both algebraic and computer-based methods. The latter method allows the general procedure to be applied to complicated circuits and systems. It is, however, not beyond the abilities of the average sophomore student.
111. GENERAL PROCEDURE TO ACCOUNT FOR COMPONENT TOLERANCES
Let Ax be the manufacturer’s numerical tolerance on the component value x and be defined as the absolute value of the difference between the actual value of x and the desired value of x divided by the desired value of x
/actual value of x - desired value of 21 desired value of 2
Ax =
In order to account for the possible change in a component’s value, each occurrence of the component in the design equation must be replaced by a term containing the component and its tolerance. The general expression is X(l f AX) where AX is the tolerance on the component X. For example, to account for the tolerance on a capacitor, C, each occurrence of the capacitor in the design equation would be replaced by the term C(l f AC) where AC is the tolerance on the capacitor’s value, C.
For relatively simple design situations, when the expression for the design parameter has been modified as described above, the design parameter is then removed through algebraic manipulation. This leaves an equation containing only the tol- erance on the design parameter and the individual component tolerances. The required component tolerances are then solved for algebraically. Two examples are shown in Section IV.
If the above algebraic procedure is not feasible (the design equation may not lend itself to easy algebraic manipulation), a computer program may be written to list the appropriate com- ponent tolerances that allow the design parameter to remain within its design tolerance. An example of this approach is also shown in Section IV.
OO18-9359/95$04.OO 0 1995 IEEE

362 IEEE TRANSACTIONS ON EDUCATION, VOL. 38, NO. 4, NOVEMBER 1995
IV. ILLUSTRATIVE EXAMPLES
In many operational amplifier (op-amp) based designs used as examples in initial undergraduate electronic circuit design classes, two common situations arise. Either the overall am- plifier gain must be maintained to within a given tolerance, or, as in the case of active RC filters, the cutoff frequency must be allowed to vary only within a small range.
For active RC filters, the expression for the cutoff frequency contains at least two unknowns (R and C), and there may be a large number of combinations of component tolerances that would allow the design tolerance to be maintained. However, in the majority of situations, the same type of resistor (carbon composition, wire-wound, etc.) and the same type of capacitor (mica, tantalum, etc.) will be used. Therefore, most situations will reduce to only two unknowns: the resistor tolerance and the capacitor tolerance. In those situations where this assumption is not valid, the computer-based method discussed
does not exceed AA. Note that this method of determining the appropriate component tolerance(s) is independent of any specific component values for Rf or Ri.
As an example, assume that an op-amp based amplifier is to have a gain of -10 f 5%. What should be the tolerance on Rf and & such that the 5% tolerance on the gain will not be exceeded?
Substituting the maximum allowable change in gain of 5% (i.e., AA = 0.05), (5) yields a value for AR of 0.0244 (= 2.44%). Since resistors with a tolerance of 2.44% are not commonly available, 1% tolerance resistors would be used for Rf and Ri. If 5% tolerance resistors (the tolerance above 2.44% that is commonly available) were to be used, (4) shows that the tolerance on the amplifier gain would be 10.5%, greatly exceeding the desired tolerance of 5%.
A Single Pole RC Low-Pass Filter: The cutoff frequency for a single pole RC low-pass filter is given by
(6) in Section IV-B may be used. 1
f o = ” Since the tolerance determination for element values is not
be done either before or after the element values have been determined.
dependent upon the specific it may Substituting the allowable shift in frequency, Afo, and the resistor and capacitor tolerances, AR and ~ c , into (6), gives
1
A. Algebraic Method
gain op-amp based amplifier has an overall gain given by An inverting Gain Op-Amp Based AmpliJer: An inverting
A = - - Rf R,
where Rf is the value of the feedback resistor and Ri is the value of the input resistor.
Taking into account the allowable change in the gain of the amplifier and the manufacturer’s tolerance on the resistor values, (1) is modified as explained in Section I11 to become
where AA is the allowable change in amplifier gain and ARf and ARi are the maximum tolerances on Rf and Ri such that the allowable change in overall gain does not exceed AA.
Assuming “worst-case” conditions (i.e., Ri changes in the negative direction and Rf changes in the positive direction such that AA assumes a maximum value), and assuming that Rf and Ri are the same type of resistor (i.e., ARf = ARi = AR), (2) becomes
”(l * Afo) = 27rRC(1 f dR)(1 f AC) . (7)
By noting that f o = &, (7) reduces to
1 (1 f AR)(1 f AC)’
1 f A f o =
Modifying (8) to yield an expression for the “worst-case” condition (i.e., AR and AC change such that A f o experiences a maximum change in value) yields
1 (1 - AR)(1 - AC)’ 1 + A f o = (9)
Unique values for both AR and AC are impossible to obtain from (9); therefore, the approach is to choose a value for AR or AC, substitute that value and the desired value of A f o into (9), and solve for the remaining component tolerance.
As the manufacturer’s tolerance becomes tighter, the num- ber of available resistor values increases, a situation not available with capacitors. Therefore, the recommended pro- cedure is to substitute both the desired value of Afo and an appropriate value for AC into (9) and solve for AR. This will provide the appropriate values for AR and AC such that the design tolerance on A f o will not be exceeded.
As an example, assume that the cutoff frequency for a single pole low-pass filter is to be 10 kHz &lo%.
From consideration of (lo), it is obvious that AC must be less than Afo. Capacitors with a tolerance of 2% are available [7]; therefore, AC is chosen to be 0.02.
Substituting AC = 0.02 and Afo = 0.1 into (10) yields a value for AR of
(4) l + A R 1 + A A = - 1 - A R
which, when solved for AR, yields
AA A R = ~ (5 ) 2 + A A ’
Equation (5) gives the necessary tolerance on both Rf and Ri such that the maximum change in overall amplifier gain AR = 0.072(= 7.2%).

KAVANAUGH: INCLUDING THE EFFECTS OF COMPONENT TOLERANCES IN THE TEACHING OF COURSES IN INTRODUCTORY CIRCUIT DESIGN 363
Resistors are not readily available with a 7.2% tolerance. Therefore, the tolerance on the resistor should be the next lowest value of 5%.
As a check on the result, substituting the values for both AC and AR into (9) and solving for Afo yields
- 1 = 0.074. 1
1 - AC - AR + ACAR Afo =
This value of 0.074 implies that even if the worst case situation of component value shift does occur, the cutoff frequency will shift by only 7.4%. This is well within the maximum allowable shift of 10%.
B. Computer-Based Method The general procedure for this method begins with the same
initial step as with the algebraic method: replace all design parameters and component values with the general expression
X ( 1 f AX)
where X is the design parameter or component value and AX is the component tolerance.
At this point, instead of attempting to solve for the compo- nent tolerances algebraically, a computer program is utilized to list all the standard component tolerances that will allow the design tolerance to remain within its desired value.
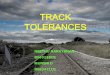
For example, consider the multiple feedback low-pass filter shown in Fig. 1. The cutoff frequency is given by
Substituting the tolerance on fo, and the tolerances on the component values, (1 1) becomes
f o ( 1 f WO) = 1
2 ~ J R 2 ( 1 f AR2)R3(1 f AR3)Cl(l f AC,)C2(1 f AC2)‘ (12)
(12) is solved for A fo to give 1 2rJRz R3C1 C2 ’ With f o =
1 J(1 f AR2)( l f AR3)(1 f ACl)( l f AC2)
Afo = - 1.
(13) The choice of a negative sign in each of the terms in the denominator of (13) in order to cause Afo to undergo a maximum change is obvious. However, for situations where the choice of sign is not obvious, a few calculations using a hand-calculator or a computer program will quickly yield the appropriate sign to use. The assumption in this paper is that this material is appropriate for use in an introductory class, and expressions where the choice may not be obvious are seldom found in such classes.
At this point in the process, a choice must be made concerning what type of components are used for Rz, R3, CI, and C2. One choice is to assume that R2 and R3 are the same type of resistor and that C1 and C2 are the same type of capacitor. Therefore the tolerance can be assumed to be
4 - c Fig. 1. Multiple feedback low-pass filter.
the same value, and this leads to the simplified expression for (13) shown below
- 1. (14) 1
J(l k AR)2(1 f AC)2 Afo =
This is basically the same form as that of (8) and can be handled in the same manner.
The second, and more practical, choice is to allow the resistors to each have different tolerance values and to allow the capacitors to each have different tolerance values. This, of course, then leads to (13).
The computer program in the Appendix is written for (13). Assuming a A fo of 0.03 (=3%), the computer program yields the following table of values:
Afo AC1 AC2 ARz AR3 0.02 0.01 0.01 0.01 0.01 0.025 0.01 0.02 0.01 0.01 0.025 0.02 0.01 0.01 0.01.
The table above indicates that several choices for tolerances on R2, R3, C1, and C2 are available which will cause the tolerance on f o to remain within 3%. Since resistors are not readily available in 2% tolerances, the program was written so as to limit the choices for resistor tolerances to those which are readily available (l%, 5%, and 10%).
V. SUMMARY
A procedure has been developed that is useful for deter- mining the component tolerance values necessary to insure that a given design parameter will remain within its tolerance. This procedure is especially appropriate for use in introductory undergraduate circuit design classes where the student is being introduced to the necessity for a careful choice of component values and tolerances.
APPENDIX
The computer program shown below is written in QuickBA- SIC and is the one used for the computer example shown in Section IV. This program has an additional advantage in that it serves as an example for sophomore engineering students of the need to be able to not only utilize “canned routines” but to be able to write his or her own programs to meet the need at hand. CLS INPUT “Enter choice for DELTAFO ”,
PRINT “DELTAFO, “DELTAC l”, ‘‘DELTACT, DELTAFOCH0ICE:PRINT
“DELTART’, “DELTAR3”

364 IEEE TRANSACTIONS ON EDUCATION, VOL. 38, NO. 4, NOVEMBER 1995
REM Assignment of DELTA values to C1, C2, R2,
DO I = I + 1: READ DELTACl(1) DELTAC2(I) = DELTACl (I) DELTAR2(I) = DELTAC 1 (I) DELTAR3(I) = DELTAC 1 (I) LOOP UNTIL I = 4
and R3
FOR X = 1 TO 4: REM Increment for C1 FOR Y = 1 TO 4: REM Increment for C2 FOR Z = 1 TO 4: REM Increment for R2 FOR M = 1 TO 4: REM Increment for R3 IF DELTAR2(Z) = 0.02 GOTO 20: REM Prevents using
IF DELTAR3(M) = 0.02 GOTO 20: REM Prevents using 0.02 for DELTAR2
0.02 for DELTAR3
RADICAND = (1 - DELTACl(X)) * (1 - DELTAC2(Y)) * (1 - DELTAR2(Z)) * (1 - DELTAR3(M))
DELTAFO = (l/SQR(RADICAND)) - 1 DELTAFO = INT((DELTAF0 + 5*10A(-4))*103)/103:
REM Rounds DELTAFO to 3 places IF DELTAFO > DELTAFOCHOICE GOTO 10 PRINT DELTAFO, DELTACl (X), DELTAC2(Y),
10 NEXT M 20 NEXT X DATA 0.01, 0.02, 0.05, 0.1
DELTAR2(Z), DELTAR3(M)
REFERENCES
[I] B. Karafin, “The general component tolerance assignment problem in electrical networks,” Ph.D. Thesis, University of Pennsylvania, 1974.
[2] G. Daryanani, Principles of Active Network Synthesis and Design. New York Wiley, ch. 5, 1976.
[3] J. W. Bandler and P. C. Liu, “Automated network design with optimal tolerances,”IEEE Trans. Circuits Syst., vol. CAS-21, no. 2, pp. 219-222, Mar. 1974.
[4] J. F. Pinel and K. A. Roberts, ‘Tolerance assignment in linear networks using nonlinear programming,” IEEE Trans. Circuit Theory, vol. CT-19, no. 9, Sept. 1972.
[5 ] K. Geher, Theory of Nemork Tolerances. Budapest: Akademiai Kiado, 1971.
[6] R. Spence and B. S . Soin, Tolerance Design of Electronic Circuits. Reading, MA: Addison-Wesley, 1988.
[7] Passive Electronic Components for Industrial and Military Electronics, Catalog C-567A, Sprague Electric Company, Mansfield, MA, 1985.
Michael F. Kavanaugh (S’64-M’68-SM’79) received the B.S. degree in physics and applied mathematics from the University of Southern Mississippi in 1962, the M.S.E.E. degree from the University of Arkansas in 1964, and the Ph.D. in electrical engineering from the University of Missouri-Rolla in 1975.
He is presently professor of technology at Southwest Missouri State University where. he teaches electronics technology and applied mathematics. Previously, he has been involved in the development and/or revitalization of engineering and engineering technology programs across the United States for ABET accreditation. He has worked as a circuits and systems design engineer for Lockheed Missiles and Space Company in Sunnyvale, CA, Motorola’s Semiconductor Products Research and Development Laboratory in Phoenix, AZ, and General Electric’s Aircraft Engine Business Group in Evendale, OH. His research interests include active filters, analog circuit design, and computer applications for the solution of electrical engineering problems.