Embed Size (px)
Citation preview
Incentive Compatibility in Signaling Games with a Continuum of TypesAuthor(s): George J. MailathSource: Econometrica, Vol. 55, No. 6 (Nov., 1987), pp. 1349-1365Published by: The Econometric SocietyStable URL: http://www.jstor.org/stable/1913560 .
Accessed: 26/02/2014 01:09
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
The Econometric Society is collaborating with JSTOR to digitize, preserve and extend access to Econometrica.
http://www.jstor.org
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
Econometrica, Vol. 55, No. 6 (November, 1987), 1349-1365
INCENTIVE COMPATIBILITY IN SIGNALING GAMES WITH A CONTINUUM OF TYPES1
BY GEORGE J. MAILATH2
This paper provides two results that are useful in proving the existence of and characteriz- ing separating equilibria in signaling games. These are games in which a privately informed agent takes an action which is observed by uninformed agents before they in turn choose actions. Depending on the equilibrium, the privately informed agent's action could reveal the private information, partially or completely. If the private information is completely revealed, the equilibrium is called separating. A key element in the analysis of separating equilibria is the examination of the implied incentive compatibility constraints (namely, that no type should have an incentive to take an action other than the prescribed equilibrium action). It is shown that these constraints together with one of two conditions imply differentiability of strategies when the set of possible types is an interval. The first condition, implied by sequentiality in many games, is an initial value condition on the informed agent's strategy. The second condition is a monotonicity condition which is similar to the familiar single crossing condition. The monotonicity condition turns out to be necessary and sufficient for there to be a strictly monotonic strategy satisfying the incentive compatibil- ity constraints. As a direct consequence of these two results, the analysis of Milgrom and Roberts (1982) is considerably strengthened.
KEYWORDS: Separating equilibria, signaling games, single crossing condition, incentive compatibility, differentiable separating strategies.
1. INTRODUCTION
THIS PAPER PROVIDES two results that are useful in proving the existence of separating equilibria and characterizing such equilibria for a broad class of economic signaling models. Models of signaling have proved to be useful in the understanding of a variety of economic phenomena-for example, the role of education in revealing ability (Spence (1973)), self-selection in insurance markets (Rothschild and Stiglitz (1976)) and limit pricing (Milgrom and Roberts (1982)). Equilibria in which agents completely reveal their private information to other agents, called separating equilibria, are of central interest. T he study ol the impact on behavior of actions revealing private information in separating equilibria and the efficiency properties of these equilibria are important aspects of the economics of incomplete information. A common and attractive method for analyzing separating equilibria in models with a continuum of types is to assume differentia- bility of action functions and write down the differential equation implied by incentive compatibility. Such an approach ignores the possibility of nondifferenti- able separating equilibria. In this paper I will prove that, for a broad class of signaling games, this approach captures all of the separating equilibria. Or, in other words, separating implies differentiable.
1 This paper is a revision of the first chapter of my Ph.D. thesis. 2 I would like to thank my advisor, Hugo Sonnenschein, for his help and advice, and a referee
for his detailed comments. Support from the Sloan Foundation in the form of an Alfred P. Sloan Doctoral Dissertation Fellowship is gratefully acknowledged.
1349
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
1350 GEORGE J. MAILATH
The second result of this paper deals with the existence of separating equilibria. One of the key steps in proving existence of separating equilibria is showing that each agent's incentive compatibility constraint is satisfied. A monotonicity condi- tion that is both necessary and sufficient for an agent's incentive compatibility constraint to be satisfied is provided and analyzed. The sufficiency of a related condition in the context of signaling in one-dimensional competitive markets3 is well known (where it is referred to as the single crossing property), with it either arising naturally in the model (e.g., Rothschild and Stiglitz (1976)) or being directly assumed (e.g., Riley (1979)). The role of the condition in signaling games does not appear to be well known. When proving existence of separating equilibria in a particular game, rather than dealing directly with the incentive compatibility constraints, it is only necessary to check that the condition is satisfied, which may be easier. In incomplete information models with sequential actions, this condition is necessary and sufficient for the existence of equilibrium, since the incentive compatibility constraints are just the conditions for equilibrium.
The next section describes the games to which the results of this paper apply and states the results. In particular, two conditions are presented under which a one-to-one strategy, if it satisfies the informed agent's incentive compatibility constraint, is differentiable and given by the solution to a differential equation. The first is an initial value condition on the informed agent's strategy which is implied by sequentiality in many games. The second is the monotonicity or single crossing condition. A precise statement is also given of the relationship between the single crossing condition and the existence of a strategy satisfying incentive compatibility. Section 3 discusses the conditions on payoffs and strategies and the results. Section 4 provides some intuition for the proofs of the results. Finally, in Section 5, as an application the analysis of Milgrom and Roberts (1982) is extended in the following two directions: Existence of separating limit price equilibria is demonstrated for arbitrary densities of the potential entrant's unit cost. Secondly, the welfare analysis is strengthened from that of being an analysis of one of possibly many separating equilibria to that of being an analysis of the unique equilibrium, in the class of one-to-one strategies.
2. THE SETTING AND RESULTS
In the equilibria of many games a privately informed agent's choice of action can be thought of as having two distinct impacts on his payoff. The first is the noninferential impact and the second is through the inferences the other agents draw about the private information. In equilibrium, an informed agent optimally chooses an action, understanding that the uninformed agents will be taking optimal actions conditional on their interferences from that action; and the uninformed agents' inferences will be correct. If the inferences of the uninformed agents leave no uncertainty about the informed agent's private information, then the equilibrium is separating (for that agent).
3By one-dimensional, I mean that the response to an agent's signal is one-dimensional (e.g., wage paid). Here, I will be considering situations where the response is not necessarily one-dimensional.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
INCENTIVE COMPATIBILITY 1351
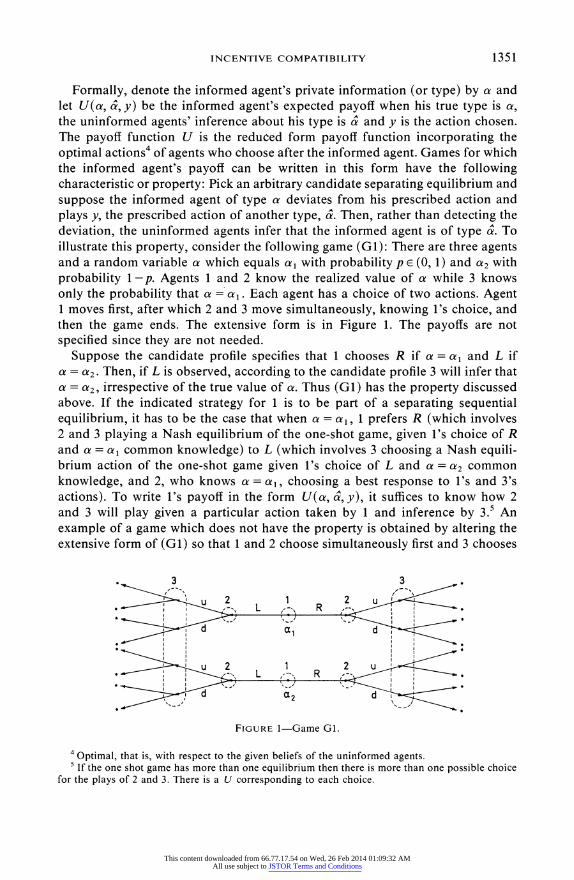
Formally, denote the informed agent's private information (or type) by a and let U(a, a, y) be the informed agent's expected payoff when his true type is a, the uninformed agents' inference about his type is a and y is the action chosen. The payoff function U is the reduced form payoff function incorporating the optimal actions4 of agents who choose after the informed agent. Games for which the informed agent's payoff can be written in this form have the following characteristic or property: Pick an arbitrary candidate separating equilibrium and suppose the informed agent of type a deviates from his prescribed action and plays y, the prescribed action of another type, a. Then, rather than detecting the deviation, the uninformed agents infer that the informed agent is of type a. To illustrate this property, consider the following game (GI): There are three agents and a random variable a which equals al with probability p c (0, 1) and a2 with probability 1 -p. Agents 1 and 2 know the realized value of a while 3 knows only the probability that a = a1. Each agent has a choice of two actions. Agent 1 moves first, after which 2 and 3 move simultaneously, knowing l's choice, and then the game ends. The extensive form is in Figure 1. The payoffs are not specified since they are not needed.
Suppose the candidate profile specifies that 1 chooses R if a = a1 and L if a = a2. Then, if L is observed, according to the candidate profile 3 will infer that a = a2, irrespective of the true value of a. Thus (GI) has the property discussed above. If the indicated strategy for 1 is to be part of a separating sequential equilibrium, it has to be the case that when a = a1, 1 prefers R (which involves 2 and 3 playing a Nash equilibrium of the one-shot game, given l's choice of R and a = a, common knowledge) to L (which involves 3 choosing a Nash equili- brium action of the one-shot game given l's choice of L and a = a2 common knowledge, and 2, who knows a = a1, choosing a best response to l's and 3's actions). To write l's payoff in the form U(a, a, y), it suffices to know how 2 and 3 will play given a particular action taken by 1 and inference by 3.5 An example of a game which does not have the property is obtained by altering the extensive form of (GI) so that 1 and 2 choose simultaneously first and 3 chooses
. -> R _ 8~L
FIGURE 1-Game GI.
4 Optimal, that is, with respect to the given beliefs of the uninformed agents. 5If the one shot game has more than one equilibrium then there is more than one possible choice
for the plays of 2 and 3. There is a U corresponding to each choice.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
1352 GEORGE J. MAILATH
after observing the choices of 1 and 2. Consider the candidate profile where 1 chooses R and 2 chooses u if a = a1 and 1 chooses L and 2 chooses d if a = a2.
Then a deviation by either 1 or 2 is detected by 36 and deception about the value of a by either 1 or 2 is not possible.
Suppose the set of possible types is the interval [im, M] c R and the set of possible actions is R. If r: [im, M] -->R is an equilibrium one-to-one strategy for the informed agent, then when he chooses y E r([m, M]) the uninformed agents infer his type is r1(y). Thus, his expected payoff is U(a, r-1(y), y). Furthermore, r is an optimal strategy for the informed agent, so that r(a) maximizes U(a, r1(y), y). So, for r to be a separating equilibrium strategy, it must be one-to-one and satisfy incentive compatibility:
(IC) r(a) E argmax U(a, r-1(y), y), Va E [m, M]. yE r([m,M])
If U(a, r1(y), y) has no other maximizer for y c r([m, M]) for all a c [im, M], then r satisfies strict incentive compatibility, i.e.,
(SIC) {r(a)} = argmax U(a, 1(y), y), VacE [m, M]. yE r([m,M])
The regularity conditions on U are (where subscripts denote partial derivatives):
(1) U(a, a, y) is C2 on [m, M]2 x R (smoothness);7
(2) U2 never equals zero, and so is either positive or negative (belief monotonicity);
(3) U13 never equals zero, and so is either positive or negative (type monotonicity);
(4) U3(a, a, y) = 0 has a unique solution in y, denoted + (a), which maxim- izes U(a, a, y), and U33(a, a, k(a)) < 0 ("strict" quasiconcavity);8 and
(5) there exists k > 0 such that for all (a, y) E [m, M] x DR U33(a, a, y) : 0=> I U3(a, ,y)l > k (boundedness).9
The other two conditions which play a role in what follows are
(6) r(aW)= (aw),whereaw=MifU2<0andmifU2>0 (initial value); and
(7) U3(a, a, y)/ U2(a, a, y) is a strictly monotonic function of a (single crossing).
The first two theorems state that incentive compatibility implies differentiability. The differential equation (DE) is immediate from the first order condition, given differentiability of the strategy r. All proofs are in the Appendix.
6 Of course, 3 does not know who has deviated. 7That is, there exists an open set 0 containing [m, M]2 and a C2 function V on Ox R which
equals U on [ m, M]2 x R. 8 This is stronger than strict quasiconcavity, but weaker than concavity. 9 This condition, with condition (4), implies that, for arbitrary r(a ), the set of possible signals,
{ye R: 3 a, U (a, ca,y): U(a, a", r(ca`))}, is bounded.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
INCENTIVE COMPATIBILITY 1353
THEOREM 1: Suppose (1)-(5) are satisfied and r: [im, M] --1 R is one-to-one and satisfies incentive compatibility. Then r has at most one discontinuity on [m, M], and where it is continuous on (m, M), it is differentiable and satisfies
dr - U2(a, a, r) da U3(a, a, r)
Furthermore, if r is discontinuous at a point, a' say, then r is strictly increasing on one of [m, a') or (a', M] and strictly decreasing on the other, and the jump at a' is of the same sign as U13.
THEOREM 2: Suppose, in addition, that either the initial value condition or the single crossing condition for (4, y) in the graph of r is satisfied. Then r is strictly monotonic on (m, M) and hence continuous and satisfies the differential equation (DE) there. If the initial value condition is satisfied, then in fact r is continuous on [m, M] and dr/da has the same sign as U13.
Incentive compatibility and the initial value condition together imply unique- ness. Let i denote the unique solution to the following restricted initial value problem: (DE), r(aw)=O(aw) and (dr/da)U13>0. (That a unique solution exists is shown in Proposition 5 in the Appendix under the additional assumption that U2(a, a, y) is bounded above.)
COROLLARY: Suppose (1)-(5) are satisfied and the initial value condition must hold. If r satisfies incentive compatibility, then r = ?.
The relationship between the single crossing condition and the existence of incentive compatible strategies is covered by the next theorem.
THEOREM 3: Suppose (1)-(5) are satisfied. A strictly increasing (decreas- ing) function TF continuous at a ', satisfies strict incentive compatibility if, and only if, (i) r solves the differential equation (DE); and (ii) when U2> 0,
U3(a, Ca, y)/ U2(a, a', y) is a strictly increasing (decreasing) function of a for (c4, y) in the graph of r, and when U2 < 0, U3(a, a, y)/ U2(a, a, y) is a strictly decreasing (increasing) function of a for (&, y) in the graph of r. (Any solution to (DE) must be either strictly increasing or strictly decreasing. By assumption, U2 never changes sign.)
3. DISCUSSION OF THE CONDITIONS AND RESULTS
The initial value condition (6) differs in flavor from the other conditions. Conditions (1)-(5) and the single crossing condition are conditions on the informed agent's expected payoff U. The initial value condition, like incentive compatibility, is a condition on r implied by equilibrium considerations. Regard- less of his true type, from the informed agent's point of view, a ' is the worst
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
1354 GEORGE J. MAILATH
point belief the uninformed agents can hold.10 It is easy to show that incentive compatibility implies r(aW) = 0 (aW) if (a W) c r([m, M]). For many games (for example, games where there is one uninformed agent who takes a one-dimensional action after the informed agent's action choice), sequentiality (Kreps and Wilson (1982)) rules out k(aW)0 r([m,M]).1' The idea is that, for actions off the equilibrium path, agents respond with strategies which are optimal, given some beliefs with support in [m, M]. Then, since aW is the worst belief on the equili- brium path, it will be the worst off the equilibrium path as well, and a deviation by aW to 0(aW) cannot be credibly punished. In Section 4, it is shown that in the limit pricing model of Milgrom and Roberts (1982), sequentiality implies the initial value condition.
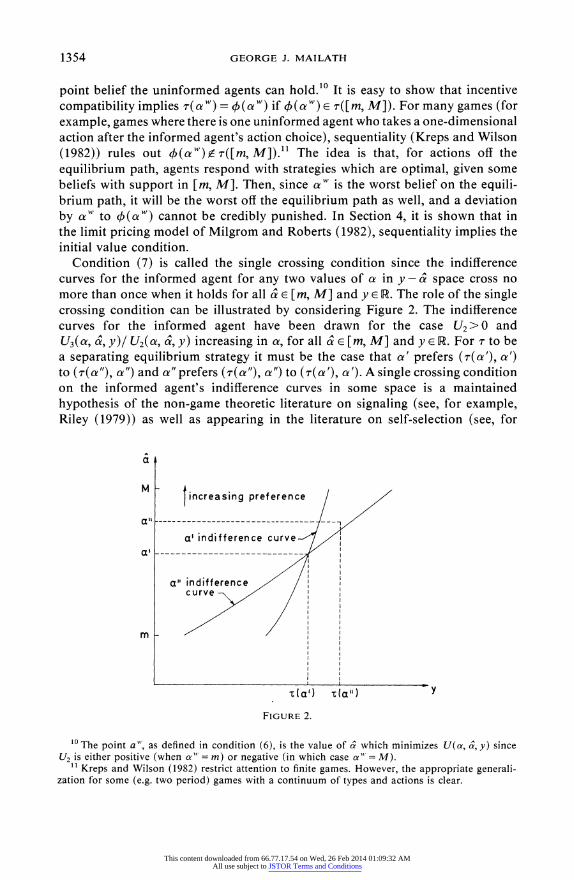
Condition (7) is called the single crossing condition since the indifference curves for the informed agent for any two values of a in y - a space cross no more than once when it holds for all a E [i, M] and y C SR. The role of the single crossing condition can be illustrated by considering Figure 2. The indifference curves for the informed agent have been drawn for the case U2 > 0 and U3((a, , Y)/ U2(a ,a, Y) increasing in a, for all a c [m, M] and y E 1R. For r to be a separating equilibrium strategy it must be the case that a' prefers (,r(a'), a') to (r(a"), a") and a" prefers (r(a"), a") to (r(a'), a'). A single crossing condition on the informed agent's indifference curves in some space is a maintained hypothesis of the non-game theoretic literature on signaling (see, for example, Riley (1979)) as well as appearing in the literature on self-selection (see, for
a
M |increasing preference
all ------ -------1-n
a' indifference curve I
a" indifference curve
m
-t(a') tc(a,,)
FiGURE 2.
0 The point a"' as defined in condition (6), is the value of a which minimizes U(a, ca, y) since U2 is either positive (when a" = m) or negative (in which case a"' = M).
1' Kreps and Wilson (1982) restrict attention to finite games. However, the appropriate generali- zation for some (e.g. two period) games with a continuum of types and actions is clear.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions

INCENTIVE COMPATIBILITY 1355
example, Cooper (1984) who analyzes monopoly provision of a good to consumers with unobservable characteristics and Mirrlees (1976) who studies optimal taxa- tion). As is the case in these other contexts,12 it is not necessary that the single crossing condition be satisfied for all (', y). This is fortunate, since in many applications it is difficult, if not impossible, to verify that the single crossing condition is satisfied for all (a', y). It is often the case that considerations such as the differential equation (DE) and the initial value condition will indicate a tractable subset of [im, M] x lR in which the graph of r must lie.
The second order condition for r(a) to locally maximize U(a, r-1(y), y) can be simplified to (dr(a)/da)U13(a,a,r(a))+U12(aa,,r(a))O, when r is differentiable and identically satisfies the first order condition (see the proof that the initial value condition implies monotonicity in the Appendix). Using (DE) again gives (dr(a)/da){ U13(a, a, r(a))- U3(a, a, r(a)) * U12(a, a 7(a))/
U2(a, a. r(a))} : 0. Since U is C2, condition (ii) of Theorem 3 for r(a) to globally maximize U(a, r-1(y), y) can be written as (where the set of a for which equality holds has zero measure)13
(8) d U13 U( U12( , 7(a())
for all ca. Comparing the local and global condition, it is apparent that the only difference is the arguments. This is somewhat analogous (but not completely since given (DE), (8) is necessary as well as sufficient) to the situation of maximizing a C2 function, pl -R- 1R. Local maximization at z, say, is guaranteed by p'(z) = 0, p"(z) < 0 while global maximization is guaranteed by p"(x) < 0 for all x.
There are two implications of the incentive compatibility and initial value conditions that deserve mention. First since U3 (aw, aw, . (aW)) = 0, any solution to the initial value problem (DE), r(a w)= (aw) has unbounded derivative as a -- aW.14 There are two solutions to the initial value problem, one has slope of the same sign as U13 and the other has slope of the opposite sign. Only the solution with slope the same sign as U13 can satisfy the local condition for a close to a or the global condition (8) for a close to a W. Hence the only possible incentive compatible strategy is , the solution to (DE), r(a W) = 4(a W) and (dr/da) U13 > 0. Since (dr/da) U13 > 0, U3 U12/ U2 - 0 iS sufficient to ensure the incentive compatibility of ?. This is the approach taken in Section 4 in the demonstration of the incentive compatibility of the separating strategy for arbitrary densities in the Milgrom and Roberts limit pricing model. If the function U is independent of the support of private information and this support is small,
12 Mirrlees (1976) and Matthews and Moore (1987) make this observation in the context of optimal taxation and monopoly provision respectively.
13 Since r is monotonic, it is in fact irrelevant where drida is evaluated. This is not true of the other terms.
14 The inverse differential equation is Lipschitz, so the inverse initial value problem has a unique solution in spite of the nondifferentiability of solutions to (DE) at a when r(a O) = (ca" ). This solution has an increasing branch and a decreasing branch, giving two solutions to the original initial value problem.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
1356 GEORGE J. MAILATH
then the single crossing condition is necessarily satisfied. (The strategy r is continuous and determined completely by aW and U. If M- m is small, then U3(a, a, r(a)) is small and U13 will dominate U3 U12/ U2 .)
Second, whether i > or K</ is determined by the sign of U13 and U2. Suppose U2>0, then aw = m. If U13>0 then dilda >0 and since Ido/dal is bounded above on [im, M] (from (4)), i(a)> + (a) for a near but larger than m. Since (DE) holds for all a > m (at M with the one-sided derivative), F(a) > 0 (a) for all a E (m, M]. Similarly, if U2 < 0 and U13 < 0, i(a) > (a) for all ac E[m, M), and if either U2 > 0 and U13 < O or U2 < 0 and U13 > O then (c(a) < k(a) for all a # aw.
Suppose the initial value condition does not hold. it is possible for r to have a discontinuity at one of the endpoints of [m, M], even when the single crossing condition is satisfied for all (a, y). This discontinuity is inconsequential in that if r satisfies incentive compatibility then so does r*, where r* equals r on (m, M) and is extended to m and M by continuity. Theorem 1 and the fact that r([m, M]) lies in a compact set (implied by (4) and (5)) ensure that r* is well-defined and by Theorem 2, r* is continuous on [m, M]. It is immediate from the continuity of U and the incentive compatibility of 7 that the type for which 7 is not equal to r* is indifferent between following 7 and 7*. Conversely, if 7 is a continuous strategy satisfying incentive compatibility with r(a W) $ 0;(a ") and U13 drlda > 0, then r also satisfies incentive compatibility, where i(a) = r(a) for a # aw and iT(aW)=y, y being the value of y#r(aw) solving U(aw,a%wy)= U(aw, a', r(aw)). Note that the discontinuity is in the direction which preserves strict monotonicity. It is also possible for an incentive compatible strategy to be discontinuous at the endpoint that is not a'W but this implies that the strategy is not strictly monotonic arid so single crossing cannot hold everywhere.
Condition (5) implies that U3(a, a, y) is bounded away from zero on domains where y is bounded away from +(a). This implies that U(a, a, y) cannot asymptote to any constant function of y as y tends to +oo or -oo, and so the set of possible signals in an equilibrium {y e 1R: 3a, U(a, a, y) : U(a, aW, r(aw))} for arbitrary r(a w), is bounded. It is necessary to assume I U2(a, a, y)j is bounded in order to ensure that the solution to the restricted initial value problem exists. If I U2(a, a, y)I is not bounded, the local solution to the restricted initial value problem may go to ?oo as a -> a', a' interior. In this case no global solution (i.e. defined on [m, M]) exists.
It is not necessary to assume that the space of possible actions is 1R. Suppose the set of possible actions is the interval A c 1R. If A is bounded, then (5) holds without assumption. The only caveat is that the solution to (DE) (with or without the initial value r(a 4) = 4(a w)) may hit the boundary of A for a interior. If this occurs there is no incentive compatible separating strategy. There will in general still exist pooling strategies, which involve different types choosing the same action.
If the initial value condition does not have to hold and the single crossing condition holds for all a, y, then there is an incentive compatible strategy corre- sponding to each permissable value of r(aw). Some values can be ruled out
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
INCENTIVE COMPATIBILITY 1357
immediately. Suppose U2> 0 and U13> 0. There exists E >0 such that if r is incentive compatible then r(aw) Z (4(m) - E, 4k(m)). (From (8), for y close to 0(m), U13 dominates and r is increasing for a near m. But from (DE), r is decreasing if r < 0 (since U3> 0).) Similar statements hold for the other sign combinations. If the choice of y does not affect the payoffs of the other agents except through the inference drawn, the strategy with r(aW) = (a W) is the Pareto efficient incentive compatible strategy.
4. DISCUSSION OF ELEMENTS OF THE PROOFS
The proof of Theorem 1 is accomplished through a series of propositions. Suppose r is one-to-one and incentive compatible. Then r must satisfy the following inequalities, for all a', a" E [ m, M]:
U(a', a', r(a')) U(a', a", r(a")), and
U (a" ae'. r(a')) U U(a" . a" r (a")
Since U is C2 and the set of type is an interval, the inequalities force a lot of structure onto r (this structure is the subject of Theorems 1 and 2). The first proposition is that as a" tends to a', U(a', a', r(a")) tends to U(a', a', r(a')). This implies that if r is discontinuous at a' and if the sequence of actions {r(a"): a" - a'} is convergent,15 then a' is indifferent between the actions r(a') and lim r(a"), when the uninformed agents' inference is a' (i.e., U(a', a', r(a')) = U(a', a', lim r(a"))). Since U is "strictly" quasiconcave, this implies that either r(a') > k(a') > lim r(a") or r(a') < k(a') < lim r(a") must be true when (a') # lim r(a"). Less formally, r must "jump over" k at any discontinuity.
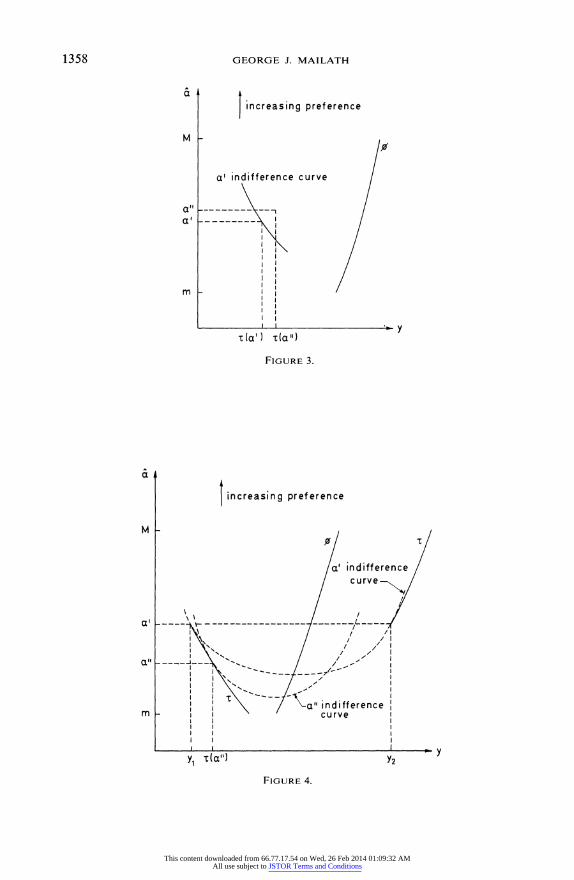
For the remainder of this section, suppose U2> 0 (so a W = m) and U13> 0. The slope of the type a informed agent's indifference curve in y- -a space is - U3(a, Ca, y)/ U2(a, a', y). For y > + (a), this slope is positive at (a, y) and for y < 41(a) it is negative at (a, y). This implies that for a' close to but less than a", if r(a') < 41(a') and r(a") < 0 (a") then r(a') > r(a"). (If r(a') - r(a"), then since a" is close to a', the point (,r(a"), a") will be strictly preferred by a' to (r(a'), a')-see Figure 3.) Similarly, if r(a')> 0(a') and r(a")> 0(a") then r(a') < r(a"). Thus, if r is monotonic it is continuous on (m, M).
The proof proceeds by expanding U(a, ca, r(ca)) around (a, r(a)) in a Taylor series and using the inequalities implied by incentive compatibility. These immedi- ately imply that if r is continuous at a' and r(a') # 41(a'), then r is differentiable at a'. A key (but unintuitive) step is demonstrating that the jump at any discon- tinuity is of the same sign as U13. This, together with the proposition that if r is continuous on an open interval, Ic [m, M], then r(a) #54 (a) for all a e I, finishes the proof of Theorem 1.
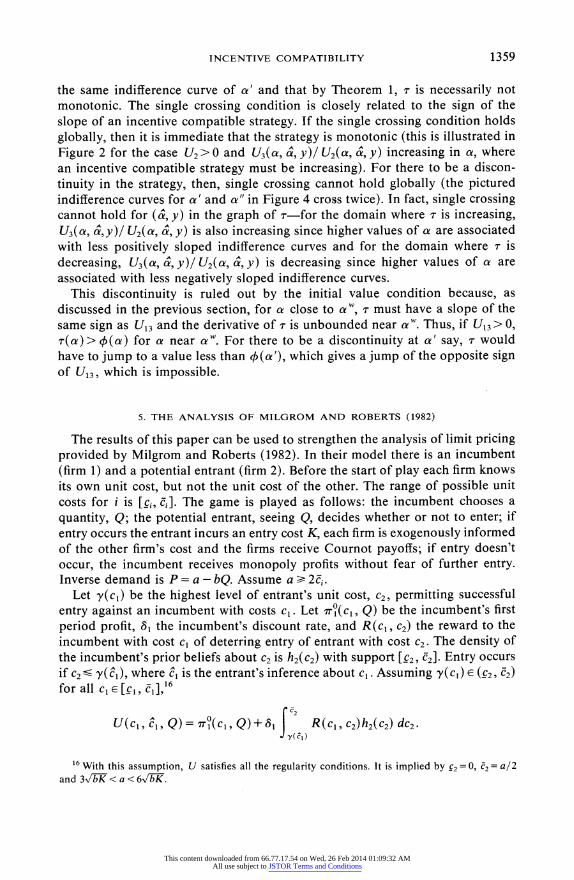
Theorem 1 does not eliminate the possibility that r may be discontinuous at one point, a' say. This case is pictured in Figure 4. Note that y, and Y2 are on
15As noted in the previous section, given r(c"') the set of possible signals is bounded, so the sequence {r(a"): a"-- ca'} will always have a convergent subsequence.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
1358 GEORGE J. MAILATH
a increasing preference
M
I
a' indifference curve
all- a"
--_____X_ a'
I I/
I /
i I l I m
I
I
~~~~~~~y t(a' ) t(a")
FIGURE 3.
a
increasing preference
M
/a indifference curve
l l
l ~ ~ ~ ~ ~ ~ l inifernc l l- - - I
Y i -(a Y2
FIGURE 4.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
INCENTIVE COMPATIBILITY 1359
the same indifference curve of a' and that by Theorem 1, r is necessarily not monotonic. The single crossing condition is closely related to the sign of the slope of an incentive compatible strategy. If the single crossing condition holds globally, then it is immediate that the strategy is monotonic (this is illustrated in Figure 2 for the case U2> 0 and U3(a, a', y)/ U2(a, a', y) increasing in a, where an incentive compatible strategy must be increasing). For there to be a discon- tinuity in the strategy, then, single crossing cannot hold globally (the pictured indifference curves for a' and a" in Figure 4 cross twice). In fact, single crossing cannot hold for (a', y) in the graph of r-for the domain where r is increasing, U3(a, a',y)/ U2(a, a', y) is also increasing since higher values of a are associated with less positively sloped indifference curves and for the domain where r is decreasing, U3(a, a, y)/ U2(a, Ca, y) is decreasing since higher values of a are associated with less negatively sloped indifference curves.
This discontinuity is ruled out by the initial value condition because, as discussed in the previous section, for a close to a , r must have a slope of the same sign as U13 and the derivative of r is unbounded near a '. Thus, if U13 > 0,
r(a) > +(a) for a near a'. For there to be a discontinuity at a' say, r would have to jump to a value less than 4(a'), which gives a jump of the opposite sign of U13, which is impossible.
5. THE ANALYSIS OF MILGROM AND ROBERTS (1982)
The results of this paper can be used to strengthen the analysis of limit pricing provided by Milgrom and Roberts (1982). In their model there is an incumbent (firm 1) and a potential entrant (firm 2). Before the start of play each firm knows its own unit cost, but not the unit cost of the other. The range of possible unit costs for i is [?i, cJ. The game is played as follows: the incumbent chooses a quantity, Q; the potential entrant, seeing Q, decides whether or not to enter; if entry occurs the entrant incurs an entry cost K, each firm is exogenously informed of the other firm's cost and the firms receive Cournot payoffs; if entry doesn't occur, the incumbent receives monopoly profits without fear of further entty. Inverse demand is P = a - bQ. Assume a - Hi.
Let y(cl) be the highest level of entrant's unit cost, c2, permitting successful entry against an incumbent with costs cl. Let 1Tr(cl, Q) be the incumbent's first period profit, 81 the incumbent's discount rate, and R(c1, c2) the reward to the incumbent with cost cl of deterring entry of entrant with cost c. The density of the incumbent's prior beliefs about c2 is h2(c2) with support [?2, cJ2]. Entry occurs if c2 :< y(c^), where c^ is the entrant's inference about cl. Assuming y(c,) E (?2, c2) for all cl E [cl, J1],16
'C2
U(cl, c^l, Q)=7ij(c1, Q)+81 R(cl, c2)h2(c2) dc2.
16 With this assumption, U satisfies all the regularity conditions. It is implied by g2 = 0, c2 = a/2 and 3,EK< a <6xFK.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions
1360 GEORGE J. MAILATH
In this model, sequentiality implies the initial value condition. Since U2 <0, a'= jc, the highest possible cost for the incumbent. Suppose r: [c cl] j- [0, a/b] is one-to-one, incentive compatible and r(j,) # O(j,), the monopoly level. If cl deviates to 0 (jc), then first period profits increase. If X (cl) = r(cl), for some cl E [cl, Jc), then the entrant infers cl from 4(jj) and there is a lower probability of entry and the incumbent receives a higher expected second period payoff. On the other hand, if 0(j)cl r([?g, cl]), then the entrant behaves optimally given some probability distribution on [cl, cl]. By following r, cl incurs entry from entrants with cost in [?c2, y(j1)]. It is easy to show that for any distribution on [cl, jl], if c2 E (y(j1), j2] then the entrant's expected profit, given entry, is negative. Thus the incumbent's expected second period payoff cannot fall from a deviation to y(cU). Thus r(jj) = (J,).
Milgrom and Roberts (1982) focus on the limit pricing separating equilibrium which has the incumbent's strategy differentiable and satisfying the initial value condition.- It is immediate from the corollary and the fact that U13 < 0 that this is the only separating equilibrium. This is important for two reasons. The analysis is not conditional on the choice of separating equilibrium, and the salience of the separating equilibrium is much enhanced (there are also, as usual, many semi-pooling sequential equilibria).
There is also the question of existence of equilibrium. Milgrom and Roberts only address this question for a particular density for c2. Suppose the solution to the differential equation, r, is always less than or equal to a/b (otherwise nonexistence is immediate). It is clear that r(cl) E [a/(4b), a/b]. The solution is globally maximizing (using (8) and cancelling) if
R(cl, yc1) + (c, z)(1)(a- cl -2bQ) 0 AC
for all cl, c1 [gl, j] and Q c [a/(4b), a/b] (note that it is not necessary to consider Q < a/(4b)). The inequality simplifies to
3a2 - 14acl +7c+ 8ay(e1) -4y(e1)2+ 4bQ{a +7c, - 8y(c1)} ? 0.
If a+7c,-8y(c )?0, then setting Q=a/(4b) proves the inequality. If a+7c1- 8 y(c) <, then setting Q = a/b and assuming 4y(j) < a17 is sufficient to prove the inequality. Thus one parameter restriction is sufficient, for all h2, to imply that r is globally maximizing.
Department of Economics, University of Pennsylvania, Philadelphia, PA 19104- 6297, U.S.A.
Manuscript received October, 1985; final revision received December, 1986.
APPENDIX
PROOF OF THEOREM 1: The idea is to expand U(a, ca, y) in a Taylor series and use incentive compatibility for ca close to a. Let
Y = {y E R: 3a, U(a, a, y) U(a, a ", r(a
17 If C2 = 0, C2 = a/2 then cl = a/4 and a < 4VbK is sufficient.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions

INCENTIVE COMPATIBILITY 1361
Incentive compatibility implies r([m, M]) c Y which has compact closure, Y, by (4) and (5). Fix a'e[m,M]. Let
g(X1, X2, X3) = U(XI, X2, x3)- U(xl, a', r(a')).
Define, for a" 5 a', a"e [m, M], as follows:
xj(0)=a', x2(0)=0a"+(1-O)a', X3(0)=-T(a")?+a(1-0)r('),
x1(O)=Oa"+(1-0)a', :-2(0)=a", and 93(0)>Tr(a").
If r is incentive compatible, then
(A.1) g (a', a", r (a ")) - 0, and
(A.2) g(at" c, a (O ") >
Expanding g(a", a", r(a")) and then g,(la', a", r(a")) yields, for some 0, A E [0, 1],
g(a", a",iT(a")) = g(a', a",T(a"))+gj(a', a', r(a'))(a"1- a')
+g12(x(A))(a"-a )'+ 1g3(X(A))(a"- a')(T(a") - r(a'))
+ 1 ~~~)2. +2g, (9(0))(a'-_ a,)
Combining (A. 1) and (A.2), and using g, (a', a', r(a')) = 0 gives
(A.3) 0 -: g(a', a"' T(a")) 1-[12(X(A)) +g, j(9(0))](a" - a )2
-g1 (x (A )) (ae" - a't) (,r(a -(a')).
PROPOSITION 1: U(a', a', r(a")) -* U(a', a', T(a')) as a"'- a'.
PROOF: Since U is C2 on [m, M]2 x Y, a compact set, it is uniformly continuous there. Fix E > 0.
There exists 81 > 0 such that
I|aY -C a| <5 == I U (a, a, y) - U (a' a , y) I < ?
for all y. Thus (A.1) implies
U(a', a', r(a')) - U(a', a ", i-(a")) > U(a', a', T(a "))-.
There exists 82 > 0 such that
Ia" - a'I < 82 U(a', a', y) - U(a ", ",y)I < E/2 and
I U(a", a', y) -U(a', a', y)l < E/2,
for all y. Hence, using (A.2),
U(a', a', T(a")) > U(a" , a", r(a" ))-E/2 > U (a', a', r(a'))-E/2 > U(a', a', T(a'))-?.
Combining yields
la -a l <min {8, 82}-e < U(a', a', r(a'))- U(a', a', T(a")) < E.
PROPOSITION 2: If r is continuous at a' and r(a') ? 4(a'), then
(A.4) lim rT(a")-Tr(a') -U2(a', a', r (a'))
"-.a' (a a') U3 (a', a', r (a'))
(The proposition asserts that the limit exists and has a particular value.)
PROOF: Expanding g(a', a", T(a")) around (a', a', -r(a')) in (A.3) and dividing by a"-a'>0 (if a"-a'<0 then the inequalities are reversed, but the argument is unaffected) gives the following, since g(a', a', T(a')) = 0
( A .5) O 92 (a' a' r (a' )) + [ (a C/ (a'/) 193 (a' a' r (a') )
293 3(X ( y)) ( (a r)(a')) +g23(X(y))(a" a')}+Ig22(x(y))(a a')
2 [g12(x(A )) + g11(x(0))]((a a') - )g13(x(A ))(Tr (a) )-(a))
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions

1362 GEORGE J. MAILATH
for some y E [0, 1]. Let
B = sup {I Uj(a, a', y)j: a, 'a E[m, M], yE Y, i,j = 1,2, 3}.
By (1), B is finite. As a"-< a', the terms after the second inequality go to zero and the expression in { }goes tog3(a', a', r(a')). Since r(a') 5 ?4(a'), g3(a', a', r(a')) ? 0, and
0 g2(a', a', r(a'))
+ limao(' 9tlg 3(a', a', T(a)) : alla al-a' J
implying (A.4).
PROPOSITION 3: If r is continuous on an open interval I contained in [m, M] then r(a') ? k(a') for all a'E I.
PROOF: First I will argue that there does not exist E, open subinterval of I, such that Tr= on E. Suppose the contrary. From (4), U33(a, a, +(a)) < 0 for all a e [m, M], so + has a finite continuous derivative on (m, M). To allow for the possibility of dql/da vanishing, write the informed agent's maximization problem as choose a to maximize U(a, a, r(a')). Suppose a" c E. Since a" maximizes U(a", a, r(a)) over a EyE,
d,r U2(a , a", r(a" ))+ U3(a", a", d(a"))-=0. dag
But U3(a", a", T(a")) = 0 and U2(a", a", r(a")) ? 0, contradicting the differentiability of r on E. Suppose now, there exists a'E I such that i(a') = (a'). Since U is C2 on a compact set,
U3(a', a', r(a')) = 0 and r is continuous at a', there exists E > 0 such that
0 < Ia"- a'1< ?, 7(a") 5 4(a")|Idr(a")/daI > Id4(a")/daj.
Define f(a)=r(a)-qS(a). Now, f(a')= O and f'(a") has the same sign as dr(a ")/ da for r(a")? 4(a "), O<la"- a'I<E. The quasiconcavity of U(a,a,y) in y and (A.4) imply, for r(a")?+(a"), O <la" - a'j <E that
f(a ") >0,# U3(a ", a ", r (a ")) < 0,Xf (a ") U2 >
Consider the case where U2> 0. By the previous paragraph, there exists a" such that a'- E < a"< a' and r(a") ? 4(a"). If f(a") > 0, then because of the uniform continuity of f on I, f'(a) -0 for all a" a < a', and so f(a')-f(a")>0, a contradiction. If f(a ") <0, then f'(a) 0 for all a"'< a < a' and sof(a) s f(a") which again leads to a contradiction. If U2 < 0, choose a" such that a' < a" < a'+ E and r(a") 5 4(a"). The argument follows through with the obvious changes.
PROPOSITION 4: r has at most one discontinuity, and the jump at that discontinuity is of the same sign as U13.
PROOF: Suppose {a'}, {ca} c [m, M] are two sequences such that aI,Ta'
and ala' (if a'= m or M only one of these sequences exists). Since r([m, M]) is bounded and I can pass to subsequences if necessary, {r(a' )} and {r(a9} are convergent sequences with limits r-(a') and r+(a'), respectively. Dividing the first and last terms of (A.3) by (a"- a'), I have for a" a a' ,,
(A.6) 0 ffi-[g12(x(A' )) + -g11G(Ox',))](a', - a') -g3(x(A I))(r(a',) - (a'))
and for a" = a',,
(A.7) 0? -[g12(x(A ,,))+2g, l ( (0'))](a t -a')-g13(x(A ') )(r(a,)-
Now,
,3(x(A,n)) = U13(a', A,na + (1- An)a', ArnT(an) + (1-An),T(a)),
where a,, = a,, and An = A', if the expression is from (A.6), and a,, = a' and A,, = A' if it is from (A.7). Letting n -->x, passing to subsequences if necessary and denoting the limits of g13(x(A,,)) in (A.6) and (A.7) by U- and Uj+3 respectively, yields
(A.8) 0 U - U (,(r-(a') - r (a')), and
(A.9) 0 -Ul+(+(a 3 - (a))-
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions

INCENTIVE COMPATIBILITY 1363
Since U13 never changes sign by (3), Up- and U' have the same sign. Thus (A.8) and (A.9) can be written as
(A.1I0) U13 > O=X--(aE') S T,(a') S T-,+(a'), U13 < =T(X) (a) -
If r-(a') or r+(a') $ r(a') then r(a') # 0 (a'), since lim U(a', a', r(a")) = U(a', a', r(a')) by Propo- sition 1. "Strict" quasiconcavity of U(a, a, y) in y implies that at most one of the two equalities T-(a') = r(a') and r+(a') = T(a') can fail (otherwise three distinct values of y give the same value for U(a', a', y)). The content of (A.1O) is that discontinuities can only occur in one direction. Suppose U13 > O. The "strict" quasiconcavity of U(a, a, y) in y implies that, if r is discontinuous at a' then r-(a') < 4(a') < r+(a'). Since 4 is continuous on [m, M], r can have, at most, one point of discontinuity. Similarly, if U13 < 0, then at any point of discontinuity r-(a') > / (a')> r+(a') and again only one point of discontinuity is possible.
To complete the proof of Theorem 1, it is sufficient to observe that if r is discontinuous at a', say, then r > 1 (and so U3 < 0) on one of (m, a') or (a', M) and r < 0 (and so U3 > 0) on the other.
Q.E.D.
PROOF OF THEOREM 2: Let a' be the point of discontinuity, if it exists. (i) Suppose U3(a, a', y)/ U2(a, a, y) is a strictly monotonic function of a for (a, y) in the graph
of r, and suppose a'? m,M exists. Then drida and U23(U3! U2)/aa are of opposite sign on either (im, a') or (a', M). Suppose it is the former (the latter is handled similarly). Now for a> a", a E (im, a'),
U(c&, a", r(a"))= U(6,&, r(6))+[U2(6, a, r(d)) dr-1/dy
+ U3(6,6, r(Ce))](r(a") -r()),
where a'e< ae a and dr-1/dy is evaluated at r(ci). Substituting for dr-1/dy yields
U(O&, a", r(a")) = U(r, (X, ,r(&)) + U2(6, a-, r(a-))
1 (3 U3 (a, o, T(0d )) da * (,r(a')-T0 )
Since dr/da is of opposite sign to U2 a(U3/ U2)/laa, U(&, a", r(a"))> U(6, ci, r(&)) which contradicts the incentive compatibility of r.
(ii) Suppose r(a) =,(a) Then a'ec a' (Proposition 1 implies
U(a , ae" 0(aY) U(a ", aY" lim" r(a)),
which in turn implies 41(a') = lim,,,, r(a).) Therefore, dr(a")/da exists and is nonzero for a" # m, a' and M. For y E r((m, M)\{a'}),
dr-'/dy = (dcr/da l,-'(V))-I and
U2(T-'(Y), rT'(y), y) dT-'/dy + U3(T-l(y), T'(y), y) = 0.
Differentiating yields
(U12+ U22)(dT-1/dy)2+(2U23+ U13)(dTr1/dy)+ U33+ U2(d2T-1/dy2) = 0.
Thus, substituting,
d2U 'dr' 2 dr a (Y)' Y) I != T(a)= - dy ){dU13+ U12}- dy2 (a,'()y11,)- dy Ida
As a"< a, Idr(a")/dal o- since r(a") - 4(a2), SO dr/da must have the same sign as U13 (otherwise d2U/dy2> O). Now,
r(a" ) > 05(a`") # U3(a", at", r(a")) < 0? -(dr(a")/daY) U2 >0.
Suppose U2> 0 (the other case is similar). Near a" = m, dr/da has the same sign as Ul3. If U13>0 then r>4 near a"' and a discontinuity is impossible (see the discussion after (A.10)). If U13 < 0 then r < 4 and again a discontinuity is impossible. Q.E.D.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions

1364 GEORGE J. MAILATH
PROPOSITION 5: The restricted initial value problem
d,r U2 (a.a.r) da U3(a,a,r)' r(a")=ck(a"') and (dr/da) U13 > O da U3(a. a. rT)
has a unique solution on [im, M], if I U2(a, a, y)I is bounded above.
PROOF: Suppose U2> 0 and U13> 0, the others are done similarly. Let x' = k(m). The inverse initial value problem
dz - U3(z'z'x) Z(X')= m
dx U2(z, z,x)'
has a unique local solution z which has the properties:
dz(x ')/dx = 0,
x > xw=o(z(x)) < x=>d(x)/dx > 0 and
x < x( z=> 0 (z(x)) > x = dz(x)/ dx < O.
Inverting z for x x x' gives a solution to the restricted initial value problem on [m, 1), for some ec (m ,M]. Let
D_ = {(a y) c [m, M] x R: y > q(a) + E},
el= sup {| U2(a, a, y)I: (a, y) c DJ, and
k'= inf {1U33(a, a, 4 (a))I: a c [m, M]}.
By assumption 13 < oo and by (4) k'> 0. There exists g such that
lY - 0 (a)| U33(a. a. y) < - k'l/2.
Then
E < lY - 0 (a)l < 6X1> U3(a. a. y)I > V'?/2
and using (5),
ly- k(a)I| > 4IU3(a, a, y)I > min {k, k'e/2}.
Thus IU2(a, a, y)/ U3(a, a, y)I is bounded on D,. By Theorem 3.1 of Miller and Michel (1982, p. 50), a unique extension to [m, M] exists if 3EV& (r is a solution on [mi, c) in D_)g lim,r r(a) c D,. Suppose not, that is, VE>03a(E) such that lim, (.) r(a)= (a(E))+E, where r is a solution on [m, a(E)) in D,. Fix E'>0. Let
12= inf {1 U2(a, y)I : (a) > y (4a)+'} and
103 = SUp {I U33(a, a, y): (a) >S- y c(a) + E'}.
Then 2 > 0 and 83 < cx. Pick 0< E < E2< E' such that f2/ (3 E2) > max Ido/ dal. There exists i such that
a c [a& (a(1)) (a) + El < r(a) < q (a) + E2
where r is a solution on [mi, a(E)) in D.,. So
lim r(a) = r(&) + lim | dr/da aa(EI) aa(EI) -
> q(&) + I + f 2/(13E2)
(- 1
> /(&) + El + f do/da = (a(E,)) + e1,
contradicting the nature of a(E,). Q.E.D.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions

INCENTIVE COMPATIBILITY 1365
PROOF OF THEOREM 3: Theorem 1 implies that (DE) is a necessary condition for a monotonic strategy to be incentive compatible. Suppose condition (ii) fails and drlda and U2a( U3/ U2)aa have opposite signs on some interval. The argument at the end of the proof of Theorem 2 can be directly applied to obtain a contradiction. If U31 U2 is constant on some interval, then r is not the unique maximizer and so not strict incentive compatible.
Suppose (i) and (ii) hold and
{Tr(a)} 5 argmax { U(a, r -(y), y): y e r([m, M])}.
Let y' be a maximizing value such that y' ? r(a). There are two possibilities. Suppose, first, r-(y') =
a'E (m, M). The first order condition is
U2 (a, a', y') d7--/dy + U3(a, a', y') = 0,
which implies
U3 (a, a', y') -dT I U3(a', , y')
U2 (a, a',y') dy U2(a', a', y')'
contradicting the monotonicity of U31 U2. Suppose then r-'(y') = m or M. It is at this point that all the structure of (ii) is used. Suppose T is strictly increasing, U2>0 and y'= r(m)-the other possibilities are handled similarly. Then U2(a, m, y') dT-'/dy + U3(a, m, y') S 0, i.e.
U2(,m, ){U2(m, m, y') U12(a, mn. y')}
But U3(a, a', r(a))/ U2(a, a', r(a')) is strictly increasing in a and so a contradiction is obtained. Q.E.D.
REFERENCES
COOPER, RUSSELL (1984): "On Allocative Distortions in Problems of Self-Selection," The Rand Journal of Economics, 15, 568-577.
KREPS, DAVID M., AND ROBERT WILSON (1982): "Sequential Equilibr:a," Econometrica, 50, 863-894.
MATTHEWS, STEVEN, AND JOHN MOORE (1987): "Monopoly Provision of Quality and Warranties: An Exploration in the Theory of Multidimensional Screening," Econometrica, 55, 441-467.
MILGROM, PAUL, AND JOHN ROBERTS (1982): "Limit Pricing and Entry Under Incomplete Information: An Equilibrium Analysis," Econometrica, 50, 443-459.
MILLER, RICHARD K., AND ANTHONY N. MICHEL (1982): Ordinary Differential Equations. New York: Academic Press.
MIRRLEES, J. A. (1976): "Optimal Tax Theory," Journal of Public Economics, 6, 327-358. RILEY, JOHN G. (1979): "Informational Equilibrium," Econometrica, 47, 331-359. ROTHSCHILD, MICHAEL, AND JOSEPH E. STIGLITZ (1976): "Equilibrium in Competitive Insurance
Markets: An Essay on the Economics of Imperfect Information," Quarterly Journal of Economics, 90, 629-649.
SPENCE, MICHAEL A. (1973): "Job Market Signaling," Quarterly Journal of Economics, 87, 355-374.
This content downloaded from 66.77.17.54 on Wed, 26 Feb 2014 01:09:32 AMAll use subject to JSTOR Terms and Conditions





























