Embed Size (px)
Citation preview

In-orbit experiments and characterisation of LISA Pathfinder
M Hewitson for the LPF teamMoriond, 21st March 2011
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
You have 90 days to optimise and fully characterise a complex instrument in
space, which has never before operated as a complete system.
2
Your mission, should you choose to accept it...
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
LPF Mission-time Aims
3
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
LPF Mission-time Aims
• Noise hunting and system optimisation to reach free-fall level of 3×10-14 ms-2 / √Hz• iterative process through experiments, system
identification, loop optimisation• reduce noise sources• reduce noise couplings
3
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
LPF Mission-time Aims
• Noise hunting and system optimisation to reach free-fall level of 3×10-14 ms-2 / √Hz• iterative process through experiments, system
identification, loop optimisation• reduce noise sources• reduce noise couplings
• Develop detailed system and noise model for LPF• goes hand in hand with system optimisation and
identification• will enable us to fully explain the observed residual
force noise• model can then be used to project the performance
towards LISA
3
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
• SC is made to follow TM1 using the μN thrusters
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
• SC is made to follow TM1 using the μN thrusters• Position of TM2 relative to TM1 is measured interferometrically
(sensitive differential measurement)• TM2 serves as a quite reference for the motion of TM1
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
• SC is made to follow TM1 using the μN thrusters• Position of TM2 relative to TM1 is measured interferometrically
(sensitive differential measurement)• TM2 serves as a quite reference for the motion of TM1
• Differential position of two TMs is maintained with low bandwidth (1mHz) by electrostatic actuation of TM2
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
• SC is made to follow TM1 using the μN thrusters• Position of TM2 relative to TM1 is measured interferometrically
(sensitive differential measurement)• TM2 serves as a quite reference for the motion of TM1
• Differential position of two TMs is maintained with low bandwidth (1mHz) by electrostatic actuation of TM2
• At lowest frequencies SC orientation is sensed with a star tracker and (ultimately) controlled using μN thrusters
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
• SC is made to follow TM1 using the μN thrusters• Position of TM2 relative to TM1 is measured interferometrically
(sensitive differential measurement)• TM2 serves as a quite reference for the motion of TM1
• Differential position of two TMs is maintained with low bandwidth (1mHz) by electrostatic actuation of TM2
• At lowest frequencies SC orientation is sensed with a star tracker and (ultimately) controlled using μN thrusters
• Other degrees-of-freedom are sensed by either IFO or capacitive sensing (GRS) and controlled via μN thrusters or electrostatic actuation
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Controlling LPF (simplified)
• TM1 is drag-free along x• no actuation
• IFO measures the position of SC (optical bench) relative to TM1 with pm precision
• SC is made to follow TM1 using the μN thrusters• Position of TM2 relative to TM1 is measured interferometrically
(sensitive differential measurement)• TM2 serves as a quite reference for the motion of TM1
• Differential position of two TMs is maintained with low bandwidth (1mHz) by electrostatic actuation of TM2
• At lowest frequencies SC orientation is sensed with a star tracker and (ultimately) controlled using μN thrusters
• Other degrees-of-freedom are sensed by either IFO or capacitive sensing (GRS) and controlled via μN thrusters or electrostatic actuation
• We control 15/18 degrees of freedom using 3 sensors and 4 actuators
4
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Example optimisation: stiffness matching
5
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Example optimisation: stiffness matching
• Each test mass has a ‘stiffness’ coupling to the SC due to the electrostatic actuation voltages and gravitational attraction (50/50)
5
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Example optimisation: stiffness matching
• Each test mass has a ‘stiffness’ coupling to the SC due to the electrostatic actuation voltages and gravitational attraction (50/50)
• This is different for each test mass• position of TMs relative to SC c.o.m.• different actuation voltages (one test-mass is drag-free so no
actuation along x)
5
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Example optimisation: stiffness matching
• Each test mass has a ‘stiffness’ coupling to the SC due to the electrostatic actuation voltages and gravitational attraction (50/50)
• This is different for each test mass• position of TMs relative to SC c.o.m.• different actuation voltages (one test-mass is drag-free so no
actuation along x)• Shaking of the SC couples differently to each TM
• this leaks in to the sensitive differential test-mass measurement
5
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Example optimisation: stiffness matching
• Each test mass has a ‘stiffness’ coupling to the SC due to the electrostatic actuation voltages and gravitational attraction (50/50)
• This is different for each test mass• position of TMs relative to SC c.o.m.• different actuation voltages (one test-mass is drag-free so no
actuation along x)• Shaking of the SC couples differently to each TM
• this leaks in to the sensitive differential test-mass measurement• Matching the stiffness reduces the coupling of SC jitter
into the sensitive dx measurement• actual stiffness can be determined through targeted experiments• stiffness can be matched by adjusting the actuation voltage
levels
5
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
The plan of attack: Experiment Master Plan
6
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
The plan of attack: Experiment Master Plan
• A battery of experiments has been designed and is undergoing optimisation and testing
6
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
The plan of attack: Experiment Master Plan
• A battery of experiments has been designed and is undergoing optimisation and testing
• These experiments will be packed together in an optimal way to form the mission time-line• various constraints are in place here:
• some experiments are prerequisites of others• some experiments disturb the system and need to be placed
carefully (thermal experiments)
6
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
The plan of attack: Experiment Master Plan
• A battery of experiments has been designed and is undergoing optimisation and testing
• These experiments will be packed together in an optimal way to form the mission time-line• various constraints are in place here:
• some experiments are prerequisites of others• some experiments disturb the system and need to be placed
carefully (thermal experiments)
• Some of the experiments will be repeated under different conditions and as the instrument performance improves
6
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
The plan of attack: Experiment Master Plan
• A battery of experiments has been designed and is undergoing optimisation and testing
• These experiments will be packed together in an optimal way to form the mission time-line• various constraints are in place here:
• some experiments are prerequisites of others• some experiments disturb the system and need to be placed
carefully (thermal experiments)
• Some of the experiments will be repeated under different conditions and as the instrument performance improves
• Naturally, the results of each experiment will, to some extent, determine the following experiments and their precise configuration• we need to analyse the experiments in (almost) real-time
6
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Mission time outline
7
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Data Flow
DataConverter
LTPDARepository
LTPDAClient
LTPDAClient
8
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Data Analysis Infrastructure
9
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Data Analysis Infrastructure
•Some of the requirements on data analysis tools:• robust and flexible to support real-time analysis• outputs/results should be accountable/traceable• toolset should contain a wide variety of typical
characterisation and lab analysis tools
9
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Data Analysis Infrastructure
•Some of the requirements on data analysis tools:• robust and flexible to support real-time analysis• outputs/results should be accountable/traceable• toolset should contain a wide variety of typical
characterisation and lab analysis tools•This led us to design and build LTPDA
• toolbox for MATLAB• provides a general object-oriented data analysis
framework• useful in many contexts, not just LPF
• all results are encapsulated as objects• these objects contain a full history of the actions
performed on them
9
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Data Analysis Infrastructure
•Some of the requirements on data analysis tools:• robust and flexible to support real-time analysis• outputs/results should be accountable/traceable• toolset should contain a wide variety of typical
characterisation and lab analysis tools•This led us to design and build LTPDA
• toolbox for MATLAB• provides a general object-oriented data analysis
framework• useful in many contexts, not just LPF
• all results are encapsulated as objects• these objects contain a full history of the actions
performed on them
9http://www.lisa.aei-hannover.de/ltpda/Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment validation
10
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment validation
1.Each proposed experiment needs to be designed to fit in to the operational context• identify the required initial state of the LPF• determine the duration of the experiment• determine the required telemetry needed to interpret the results• identify the end state of the LPF and the constraints placed on subsequent
experiments
10
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment validation
1.Each proposed experiment needs to be designed to fit in to the operational context• identify the required initial state of the LPF• determine the duration of the experiment• determine the required telemetry needed to interpret the results• identify the end state of the LPF and the constraints placed on subsequent
experiments2.The feasibility of the experiment needs to be assessed and the
experiment adjusted until it can be carried out• map experiment description to real system parameters• assess the impact of the experiment on the time-line
10
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment validation
1.Each proposed experiment needs to be designed to fit in to the operational context• identify the required initial state of the LPF• determine the duration of the experiment• determine the required telemetry needed to interpret the results• identify the end state of the LPF and the constraints placed on subsequent
experiments2.The feasibility of the experiment needs to be assessed and the
experiment adjusted until it can be carried out• map experiment description to real system parameters• assess the impact of the experiment on the time-line
3.Any associated data analysis needs to be designed and analysed for sensitivity• what results should the analysis produce, and with what accuracy?• how should the data be analysed?
10
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment validation
1.Each proposed experiment needs to be designed to fit in to the operational context• identify the required initial state of the LPF• determine the duration of the experiment• determine the required telemetry needed to interpret the results• identify the end state of the LPF and the constraints placed on subsequent
experiments2.The feasibility of the experiment needs to be assessed and the
experiment adjusted until it can be carried out• map experiment description to real system parameters• assess the impact of the experiment on the time-line
3.Any associated data analysis needs to be designed and analysed for sensitivity• what results should the analysis produce, and with what accuracy?• how should the data be analysed?
4.The data analysis tools need to be identified, written and tested• which tools within the LTPDA framework are needed?
10
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment validation
1.Each proposed experiment needs to be designed to fit in to the operational context• identify the required initial state of the LPF• determine the duration of the experiment• determine the required telemetry needed to interpret the results• identify the end state of the LPF and the constraints placed on subsequent
experiments2.The feasibility of the experiment needs to be assessed and the
experiment adjusted until it can be carried out• map experiment description to real system parameters• assess the impact of the experiment on the time-line
3.Any associated data analysis needs to be designed and analysed for sensitivity• what results should the analysis produce, and with what accuracy?• how should the data be analysed?
4.The data analysis tools need to be identified, written and tested• which tools within the LTPDA framework are needed?
5.A full end-to-end simulation of the experiment needs to be performed
10
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiment simulation
•We have a mission simulator• LSS: LISA Pathfinder STOC Simulator
• STOC: Science and Technology Operations Centre
•Full 3D non-linear, closed-loop dynamical simulator developed by industry
•For validation purposes, it produces the closest approximation we have to real LPF data
End-to-end modelling for drag-free missions with application to LISA Pathfinder, N Brandt et al, Automation and Remote Control, 66/6, 2004
11
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Characterising the Simulator
12
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Characterising the Simulator
• Why?• It is the basis on which we validate our experiments• It gives us realistic data with which to develop and validate
our analyses• It is the most complete system model available
12
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Characterising the Simulator
• Why?• It is the basis on which we validate our experiments• It gives us realistic data with which to develop and validate
our analyses• It is the most complete system model available
• Strategy:• get data out of the simulator at all possible points in the loop• measure the (open-loop) transfer functions of individual
elements in the loop, wherever possible• non-linear blocks can’t be done this way• blocks which mix many inputs to one output need special
treatment• inspect the simulator code to validate the measurements and
expectation
12
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
System model
Controllers
Sensing• IFO• GRS• ST
Dynamics
Actuators• μN thrusters• Cap. Act.
13
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
System model
Controllers
Sensing• IFO• GRS• ST
Dynamics
Actuators• μN thrusters• Cap. Act.
13
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
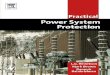
Closed-loop measurement
• Inject guidance signals (set-point)•Measure open-loop TF
• guidance to error signal
14
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Closed-loop measurement
• Inject guidance signals (set-point)•Measure open-loop TF
• guidance to error signal
14
Drag-free loop along x
simulator datalinear ss model
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Suspension loop
•Reminder: Position of TM2 relative to TM1 is controlled via the differential TM position IFO output (o12)
15
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Suspension loop
•Reminder: Position of TM2 relative to TM1 is controlled via the differential TM position IFO output (o12)
15
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Suspension loop
•Reminder: Position of TM2 relative to TM1 is controlled via the differential TM position IFO output (o12)
15
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
System Parameters
•LPF has thousands of tunable parameters• In flight we can only change system parameters•Physical characteristics of the system need to
be identified (measured/estimated)
16
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
System Parameters
•LPF has thousands of tunable parameters• In flight we can only change system parameters•Physical characteristics of the system need to
be identified (measured/estimated)
Name Value Description
A1 1.0 μN thrusters overall gainA2 1.0 Cap. Act. overall gain
S21 0.0 Imperfection of IFO common-mode rejection
D1 0.0 Delay on drag-free loop guidance input
D2 0.0 Delay on suspension loop guidance input
ω12 -1×10-6 s-2 TM1-SC total stiffness
ω122 -7×10-7 s-2 Differential test-mass stiffness (ω22 - ω12)16
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Parameter estimation
•One of the key activities will be the characterisation of the (sensitive) x-axis controls
•A series of experiments has been designed for just this purpose
17
Bayesian parameter estimation in the second LISA Pathfinder Mock Data ChallengeNofrarias et al, Phys. Rev. D 82, 122002 (2010)
Non-linear parameter estimation for the LTP experimentGiuseppe Congedo et al, Proceedings of the 8th International LISA Symposium
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiments 1 and 2
18
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiments 1 and 2
•Experiment 1:• inject a sequence of sinusoidal signals into the drag-
free loop guidance input• shake SC along x
18
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Experiments 1 and 2
•Experiment 1:• inject a sequence of sinusoidal signals into the drag-
free loop guidance input• shake SC along x
•Experiment 2:• inject a sequence of sinusoidal signals into the
suspension loop guidance input• shake TM2 along x
18
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
S21
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
i1
CdfA1
D1
S21
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
i1
CdfA1
D1
[N]μN
ThrustersSC/TM1
Dynamicsω21
[N]
S21
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
i1
CdfA1
D1
[N]μN
ThrustersSC/TM1
Dynamicsω21
[N]
i12D2
CsusA2
S21
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
i1
CdfA1
D1
[N]μN
ThrustersSC/TM1
Dynamicsω21
[N]
i12D2
CsusA2TM2
DynamicsTM2
Cap. Act. [N]ω22
[N]
S21
Monday, March 21, 2011

x1
x12o12
o1
M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Model
19
IFO[m]
[m]
[m]
[m]
i1
CdfA1
D1
[N]μN
ThrustersSC/TM1
Dynamicsω21
[N]
i12D2
CsusA2TM2
DynamicsTM2
Cap. Act. [N]ω22
[N]
S21
ω2∆
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Modelling the system
20
Modeling LISA Pathfinder for Data AnalysisMarc Diaz Aguilo et al, Proceedings of the 8th International LISA Symposium
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Modelling the system
•We have different modelling schemes implemented in LTPDA• symbolic equation models, various transfer function
representations, state-space models
20
Modeling LISA Pathfinder for Data AnalysisMarc Diaz Aguilo et al, Proceedings of the 8th International LISA Symposium
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Modelling the system
•We have different modelling schemes implemented in LTPDA• symbolic equation models, various transfer function
representations, state-space models
•Models can be used for:• template generation• noise simulations• fast, easier to develop
20
Modeling LISA Pathfinder for Data AnalysisMarc Diaz Aguilo et al, Proceedings of the 8th International LISA Symposium
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Fitting the data
21
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Fitting the data
•We have three different methods for parameter estimation:• linear least-squares fit• non-linear least-squares fit• MCMC
21
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Fitting the data
•We have three different methods for parameter estimation:• linear least-squares fit• non-linear least-squares fit• MCMC
•All analyse multiple experiments• multiple input signals• multiple system models• multiple output signals
21
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Example: MCMC
22
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Results on simulator data
•We simulated exp. 1 and 2 using mission simulator
•We estimate parameters of our simple 1D models using the three methods
23
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Quality of fit
24
Drag-free loop closed-loop TF
Drag-free to S
uspension loop coupling
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Residuals
25
Drag-free loop Suspension loop
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Using the parameter estimates
•The parameter estimates can feed the model•We then use the model to explain the observed
noise from the simulator• noise projections
•Use the 3D linear state-space models to run noise simulations
• Input noise models are the same as those in the simulator• follow mission requirements
26
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM1
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)4. Save time series
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)4. Save time series5. Make spectral density estimates of two longitudinal
IFO outputs (o1,o12)
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)4. Save time series5. Make spectral density estimates of two longitudinal
IFO outputs (o1,o12)6. Convert these to acceleration (a1, aΔ) and make
spectral density estimates
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)4. Save time series5. Make spectral density estimates of two longitudinal
IFO outputs (o1,o12)6. Convert these to acceleration (a1, aΔ) and make
spectral density estimates7. Repeat for other noise sources
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)4. Save time series5. Make spectral density estimates of two longitudinal
IFO outputs (o1,o12)6. Convert these to acceleration (a1, aΔ) and make
spectral density estimates7. Repeat for other noise sources8. Make correlated sum of all time-series and convert this
to acceleration and make spectral density estimates
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Projection Strategy
1. We use our linear state-space model of LPF2. Inject a single noise source, e.g., capacitive actuation
noise for TM13. Run simulation (72H)4. Save time series5. Make spectral density estimates of two longitudinal
IFO outputs (o1,o12)6. Convert these to acceleration (a1, aΔ) and make
spectral density estimates7. Repeat for other noise sources8. Make correlated sum of all time-series and convert this
to acceleration and make spectral density estimates9. Make projection plots
27
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
TM differential position noise
28
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Converting to acceleration
29
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Converting to acceleration
•We want to know the residual acceleration on the SC and the differential acceleration between the two TMs
29
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Converting to acceleration
•We want to know the residual acceleration on the SC and the differential acceleration between the two TMs
•Need to take out the effect of the dynamics • compute the in-loop acceleration needed to produce
the position observations
29
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Converting to acceleration
•We want to know the residual acceleration on the SC and the differential acceleration between the two TMs
•Need to take out the effect of the dynamics • compute the in-loop acceleration needed to produce
the position observations•Account for the control loops
• the in-loop accelerations can be corrected for the commanded accelerations coming from the controllers
• this gives us the out-of-loop (or residual) accelerations of the bodies
29
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Differential test-mass acceleration
30
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Differential test-mass acceleration
30
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Free-flight
• One of the leading noise sources will be capacitive actuation on TM2• Switch off TM2 actuation
• Can only be done for a short time (~100s)
• Get more free-flight by kicking TM2 away and let it drift back• tossing a coin
• Analyse the data between the kicks• low-noise since cap. act. noise
is not present
31
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Free-flight
• One of the leading noise sources will be capacitive actuation on TM2• Switch off TM2 actuation
• Can only be done for a short time (~100s)
• Get more free-flight by kicking TM2 away and let it drift back• tossing a coin
• Analyse the data between the kicks• low-noise since cap. act. noise
is not present
31
Monday, March 21, 2011

M Hewitson, LPF Data Analysis, Moriond, 21st March 2011
Summary
•Always expect the unexpected!• analysis tools need to be flexible and robust• modelling system needs to be highly configurable• operations science team needs to be well trained and
familiar with all aspects of the system•We will be ready through:
• on-ground unit- and system-level hardware testing• mock data challenges• operational exercises• training sessions• rigorous testing
32
Monday, March 21, 2011