Embed Size (px)
Citation preview

REVIEW PAPER
Improvement of power system stability using geneticallyoptimized SVC controller
Salman Hameed • Pallavi Garg
Received: 26 July 2013 / Revised: 16 January 2014
� The Society for Reliability Engineering, Quality and Operations Management (SREQOM), India and The Division of Operation and
Maintenance, Lulea University of Technology, Sweden 2014
Abstract Single machine infinite bus (SMIB) power
system and multi-machine power system (MMPS) stability
improvement by tuning of static var compensator (SVC)
based controller parameters are investigated in the pro-
posed method. The design problem is formulated as an
optimization problem with a time-domain simulation-based
objective function and real-coded genetic algorithm is used
for searching optimal controller parameters. SMIB power
system and MMPS models are developed using MAT-
LAB’s SIMULINK which incorporates SVC controller. A
fault is created on the transmission line. The simulation
results of SMIB power system and MMPS without SVC
controller and with SVC controller are presented. The
simulation results are analyzed which show that the power
system becomes unstable on the occurrence of the fault if
SVC controller is not used. This paper proves the effec-
tiveness of the proposed design. Thus the proposed method
enhances the power system stability.
Keywords Power system stability � Damping of power
oscillations � SVC � Real-coded genetic algorithm � Multi-
machine power system
1 Introduction
Modern power system consists of generators, transmission
lines, loads and transformers. When the loading of long
transmission line is increased, transient stability of power
system on the occurrence of a fault may be a major prob-
lem for power engineers.
The problem of unstable power system on occurrence
of the fault can be solved with the use of flexible AC
transmission system (FACTS) controllers. FACTS con-
trollers are very fast in controlling the system condition
and can improve the voltage stability, steady state stability
and transient stability of complex power system (Hingo-
rani and Gyugyi 2001; Mathur and Varma 2002; Padiyar
2007).
Static var compensator (SVC) is a first generation
FACTS device which can control voltage at the required
bus and thus improves the voltage profile of the power
system. The reactive power compensation is done by
varying the firing angle of the thyristors of SVCs (Hingo-
rani and Gyugyi 2001; Mathur and Varma 2002).
2 Structure of SVC-based controller
A lead–lag structure is used in SVC-based controller as
shown in Fig. 1.
The input to the controller is the speed deviation Dx.
The structure consists of: a gain block; a signal washout
block and two-stage phase compensation block. The phase
compensation block gives the appropriate phase-lead
characteristics to compensate for the phase lag between
input and the output signals. The signal washout block
works as a high-pass filter which passes signals associated
with oscillations in input signal to pass unchanged. Without
it steady changes in input would modify the output
(Gyugyi 1988; Kundur 1993; Tang and Meliopoylos 1997;
Zhou 1993).
S. Hameed (&) � P. Garg
Electrical Engineering Department, ZH College of Engineering
and Technology, Aligarh Muslim University,
Aligarh 202001, UP, India
e-mail: [email protected]
123
Int J Syst Assur Eng Manag
DOI 10.1007/s13198-014-0233-6

3 Problem formulation
In lead-lag structured controller the value of washout time
constant may be in the range 1–20 s and is generally pre-
specified. In the proposed structure, we fix the washout
time constant as 10 s, Tws = 10 s.
The controller gains KS; and the time constants T1SVC,
T2SVC, T3SVC and T4SVC are to be determined.
The SVC controller should minimize the power system
oscillations after a large disturbance so as to improve the
power system stability. In the present study, an integral
time absolute error of the speed deviations is taken as the
objective function. The objective function is written as:
J ¼Zt¼tsim
t¼0
Dxj j � t � dt ð1Þ
where, Dx is the speed deviation and tsim is the time of the
simulation.
Objective function is calculated by time-domain simu-
lation of the power system. For obtaining improved settling
time and overshoot the value of objective function should
be minimum (Chang and Xu 2007; Panda and Padhy 2007,
2008; Panda et al. 2008; Panda and Ardil 2008).
4 Genetic algorithm (GA)
Advantages of genetic algorithm (GA) over other optimi-
zation techniques Genetic algorithm (GA) is selected for
optimization because it is robust in comparison to other
conventional methods. It is different from other optimiza-
tion and search methods as it works with a coding of the
parameter set, not the parameters themselves. GA search
from a population of points, not a single point and it use
objective function information, not derivatives or other
auxiliary knowledge. Further, GA use probabilistic transi-
tion rules, not deterministic rules.
GA maintains and manipulates a population of solutions
and implements a survival of the fittest strategy in their
Fig. 1 Structure of the SVC-based controller
Fig. 2 Genetic algorithm flowchart
2100 MVA13.8KV/500KV
300 Km
150 Km 150 Km
SVC
Trfr
CB
CB
CB
CB CB
2100 MVAM1
Fault
Fig. 3 Single machine infinite-
bus power system with SVC
Int J Syst Assur Eng Manag
123

search for better solutions. The fittest individuals of any
population tend to reproduce and survive to the next gen-
eration thus improving successive generations. The inferior
individuals can also survive and reproduce (Panda and
Padhy 2007; Panda and Padhy 2008; Panda et al. 2008;
Panda and Ardil 2008).
Use of GA requires the determination of following six
fundamental issues:
(I) Chromosome representation.
(II) Selection function.
(III) The genetic operators.
Fig. 4 SIMULINK model of
SMIB system without SVC
Fig. 5 SIMULINK model for
SMIB system with SVC but no
control (Vref = 1 pu)
Int J Syst Assur Eng Manag
123
(IV) Initialization.
(V) Termination.
(VI) Evaluation function.
The computational flowchart of the GA optimization
process used in the proposed structure is given in Fig. 2.
5 SIMULINK modeling of SVC for single machine
infinite bus (SMIB) power system
First, a practical case of single machine infinite bus (SMIB)
power system is considered.
0 2 4 6 8 10 12 14 16 18 20-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
time (seconds)
Sta
tor
Cur
rent
, id
(p.u
.)
Without SVC
With SVC but No Control
With SVC Control
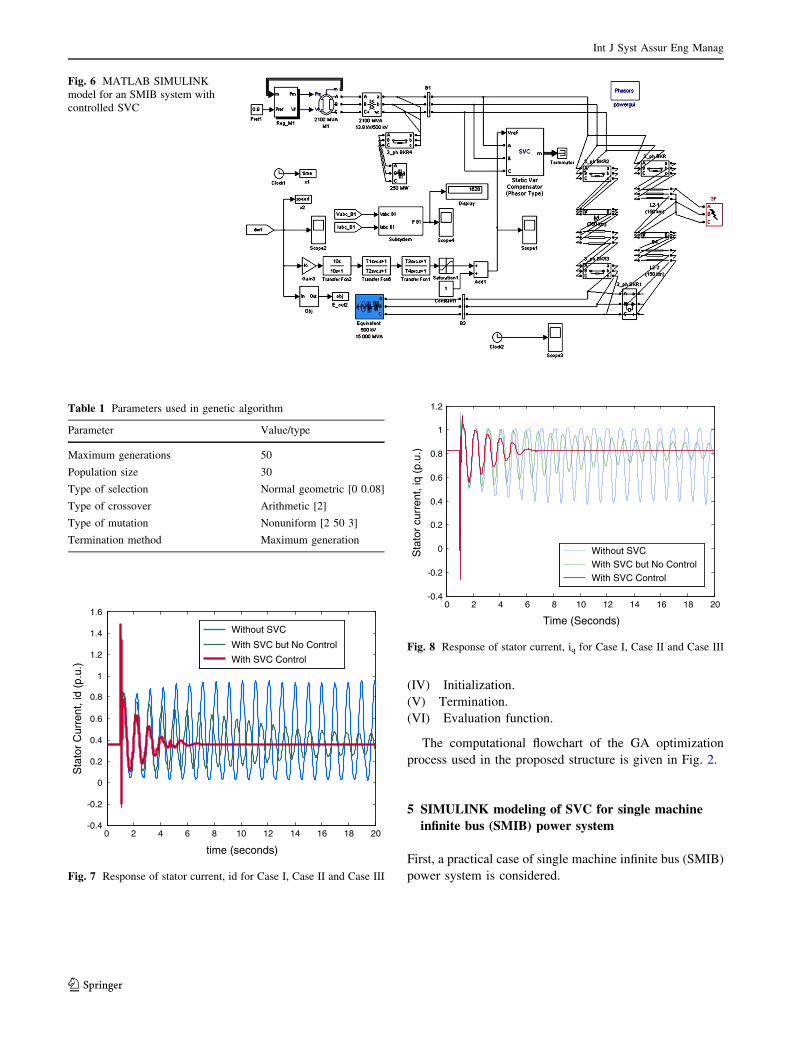
Fig. 7 Response of stator current, id for Case I, Case II and Case III
Table 1 Parameters used in genetic algorithm
Parameter Value/type
Maximum generations 50
Population size 30
Type of selection Normal geometric [0 0.08]
Type of crossover Arithmetic [2]
Type of mutation Nonuniform [2 50 3]
Termination method Maximum generation
Fig. 6 MATLAB SIMULINK
model for an SMIB system with
controlled SVC
0 2 4 6 8 10 12 14 16 18 20-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time (Seconds)
Sta
tor
curr
ent,
iq (
p.u.
)
Without SVCWith SVC but No ControlWith SVC Control
Fig. 8 Response of stator current, iq for Case I, Case II and Case III
Int J Syst Assur Eng Manag
123

The model of power system shown in Fig. 3 is devel-
oped using SimPowerSystems blockset. There are three
cases:
Case I: SMIB power system without SVC (Fig. 4)
Case II: Model of SMIB power system with SVC but no
control (Fig. 5)
Case III : Model of SMIB power system with SVC
control (Fig. 6)
6 Simulation
The parameters employed for the implementations of real-
coded genetic algorithm (RCGA) in the present study are
given in Table 1.
0 2 4 6 8 10 12 14 16 18 20-0.01
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0.01
Time (Seconds)
Rot
or s
peed
dev
iatio
ns, d
w (
p.u.
)
Without SVCWith SVC but No ControlWith SVC Control
Fig. 11 Response of rotor speed deviation, dx for Case I, Case II and
Case III
0 2 4 6 8 10 12 14 16 18 20500
1000
1500
2000
2500
3000
Time (seconds)
Line
pow
er, P
L (M
W)
Without SVCWith SVC but No ControlWith SVC Control
Fig. 12 Response of line power, PL at bus-1 for Case I, Case II and
Case III
0 2 4 6 8 10 12 14 16 18 200.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
Time (seconds)
Vre
f (p.
u.)
Fig. 13 SVC reference voltage signal for Case III
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (Seconds)
Mac
hine
Act
ive
Pow
er O
utpu
t, P
eo (
p.u.
)
Without SVCWith SVC but No ControlWith SVC Control
Fig. 9 Response of machine active power output, Peo for Case I, Case
II and Case III II and Case III
0 2 4 6 8 10 12 14 16 18 20-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
Time (Seconds)
Rot
or a
ngle
dev
iatio
n d
__th
eta
(rad
) Without SVCWith SVC but No ControlWith SVC Control
Fig. 10 Response of rotor angle deviation, dh for Case I, Case II and
Case III
Int J Syst Assur Eng Manag
123

Simulations were conducted in the MATLAB 7.7.0
environment and the optimization process is repeated 20
times. As three-phase non-linear models of power system
components are used in the present study, realization of
RCGA optimization process consumes on an average
3,000 s of CPU time. The best final solutions obtained in
the 20 runs are given below (Houari et al. 2007; Oonsivilai
A 2007; Venkateswara Rao et al. 2009).
For SVC controller
Ksvc = 193.3288, T1svc = 0.0538 s, T2svc = 0.2724 s,
T3svc = 0.3507 s, T4svc = 0.8041 s
To assess the effectiveness of the proposed controller
simulation studies are carried out for various models. The
behavior of the power system is analyzed at loading con-
dition P = 0.9 pu under severe disturbance. A 5-cycle,
3-phase fault is applied at the middle of the line at
t = 1.0 s. The original system is restored upon the fault
clearance. The system response under this severe distur-
bance is shown in Figs. 7, 8, 9, 10, 11, 12 and 13.
Case I: Response of SMIB power system without SVC
Case II: Response of SMIB power system with SVC but
no control
2100 MVA13.8KV/500KV
175 Km
SVC
Trfr
CB2100 MVA
M1
Fault
CB
175 Km175 Km
175 Km
100Km1400 MVA
13.8KV/500KV2100 MVA
M34200 MVA
M2
2100 MVA13.8KV/500KV
50 Km
Fig. 14 Multi machine power
system (MMPS) with SVC
Fig. 15 SIMULINK model of
MMPS system without SVC
Int J Syst Assur Eng Manag
123

Case III: Response of SMIB power system with RCGA
optimized SVC-based controller
7 SIMULINK modeling of SVC for multi-machine
power system
After SMIB power system, a practical case of multi-
machine power system (MMPS) is considered in this paper.
The model of power system shown in Fig. 14 is devel-
oped using SimPowerSystems blockset. There are three
cases:
Case I: Model of MMPS without SVC (Fig. 15)
Case II: Model of MMPS with SVC but no control
(Fig. 16)
Case III: Model of MMPS with SVC control (Fig. 17)
The system consists of three hydraulic generating units.
Two of 2,100 MVA, 13.8 kV, 60 Hz each and one of 4,200
MVA, 13.8 kV, 60 Hz, three 3-phase 13.8/500 kV step-up
transformer and a 200 MVA SVC. The generators are
equipped with hydraulic turbine and governor (HTG),
excitation system. The HTG represents a nonlinear
hydraulic turbine model, a PID governor system, and a
servomotor. The excitation system consists of a voltage
regulator and DC exciter, without the exciter’s saturation
function (SimPowerSystems 2012).
8 Simulation
The parameters employed for the implementations of
RCGA in the present study are given in Table 2.
Simulations were conducted in the MATLAB 7.7.0
environment and the optimization process is repeated 20
times. As three-phase non-linear models of power system
components are used in the present study, realization of
RCGA optimization process consumes on an average
7,000 s of CPU time. The best final solutions obtained in
the 20 runs are given below.
For SVC controller:
Ksvc = 168.0367, T1svc = 0.9049 s, T2svc = 0.4528 s,
T3svc = 0.8208 s, T4svc = 0.4483 s
Fig. 16 SIMULINK model of
MMPS system with SVC
without control
Int J Syst Assur Eng Manag
123
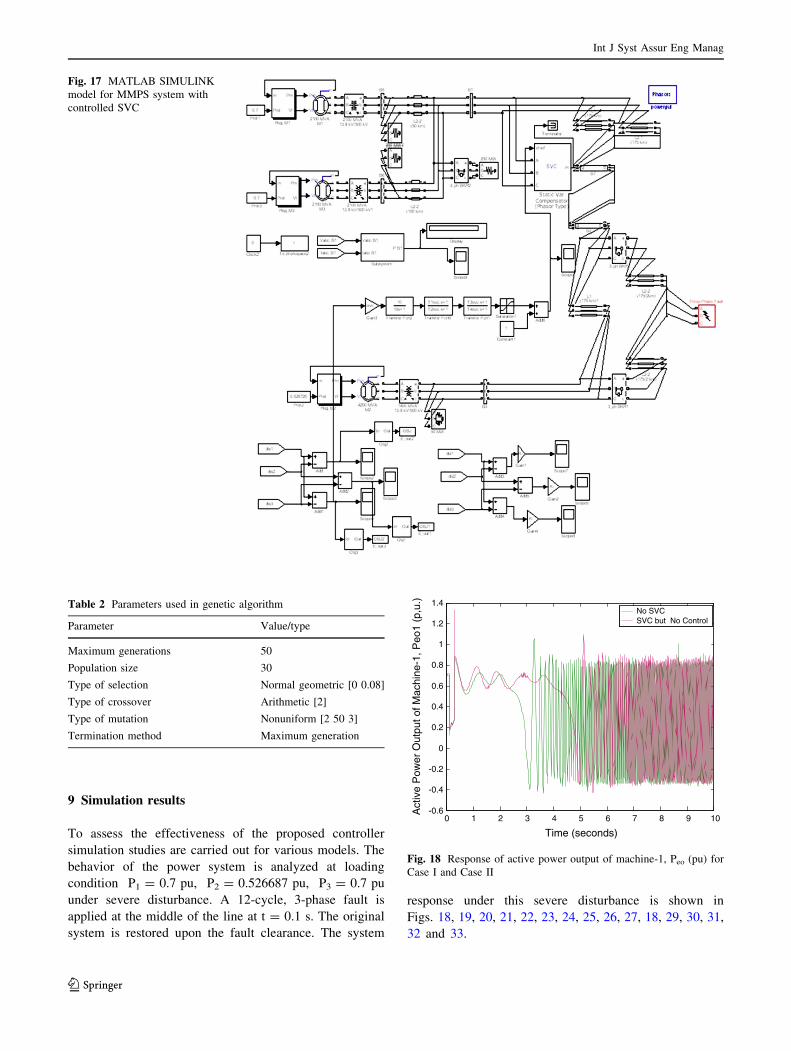
9 Simulation results
To assess the effectiveness of the proposed controller
simulation studies are carried out for various models. The
behavior of the power system is analyzed at loading
condition P1 = 0.7 pu, P2 = 0.526687 pu, P3 = 0.7 pu
under severe disturbance. A 12-cycle, 3-phase fault is
applied at the middle of the line at t = 0.1 s. The original
system is restored upon the fault clearance. The system
response under this severe disturbance is shown in
Figs. 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 18, 29, 30, 31,
32 and 33.
Fig. 17 MATLAB SIMULINK
model for MMPS system with
controlled SVC
Table 2 Parameters used in genetic algorithm
Parameter Value/type
Maximum generations 50
Population size 30
Type of selection Normal geometric [0 0.08]
Type of crossover Arithmetic [2]
Type of mutation Nonuniform [2 50 3]
Termination method Maximum generation
0 1 2 3 4 5 6 7 8 9 10-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (seconds)
Act
ive
Pow
er O
utpu
t of M
achi
ne-1
, Peo
1 (p
,u.)
No SVCSVC but No Control
Fig. 18 Response of active power output of machine-1, Peo (pu) for
Case I and Case II
Int J Syst Assur Eng Manag
123

0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time (seconds)
Act
ive
Pow
er O
utpu
t of M
achi
ne-2
, Peo
2 (p
.u.)
No SVCSVC but No Control
Fig. 19 Response of active power output of machine-2, Peo (pu) for
Case I and Case II
0 1 2 3 4 5 6 7 8 9 10-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time (seconds)
Act
ive
Pow
er O
utpu
t of M
achi
ne-3
,P
eo3
(p.u
.)
No SVCSVC but No Control
Fig. 20 Response of active power output of machine-3, Peo (pu) for
Case I and Case II
0 1 2 3 4 5 6 7 8 9 10-5
-4
-3
-2
-1
0
1
2
3x 10
-3
Time (seconds)
Spe
ed v
aria
tions
, dw
1-3
(p.u
.)
No SVC
SVC but No Control
Fig. 21 Response of difference of speed variations of machine-
1(dx1) and machine-3 (dx3), dx13 for Case I and Case II
0 1 2 3 4 5 6 7 8 9 10-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Time (seconds)
dw1-
2 (p
.u.)
No SVCSVC but No Control
Fig. 22 Response of difference of speed variations of machine-
1(dx1) and machine-2 (dx2), dx12 for Case I and Case II
0 1 2 3 4 5 6 7 8 9 10-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Time (seconds)
dw3-
2 (p
.u.)
No SVCSVC but No Control
Fig. 23 Response of difference of speed variations of machine-3
(dx3) and machine-2 (dx2), dx32 for Case I and Case II
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6x 10
4
Time (seconds)
d__t
heta
1-2
(deg
ree)
No SVCSVC but No Control
Fig. 24 Response of difference of rotor angle deviations dh (degree)
of machine-1 and machine-2, dh12 for Case I and Case II
Int J Syst Assur Eng Manag
123

0 1 2 3 4 5 6 7 8 9 10-15
-10
-5
0
5
10
Time (seconds)
d__t
heta
1-3
(deg
ree)
No SVCSVC but No Control
Fig. 25 Response of difference of rotor angle deviations dh (degree)
of machine-1 and machine-3, dh13 for Case I and Case II
0 1 2 3 4 5 6 7 8 9 10-2000
-1000
0
1000
2000
3000
4000
Time (Seconds)
Act
ive
Pow
er a
t Bus
-1 (
MW
)
No SVCSVC but No Control
Fig. 26 Response of active power at bus-1 or power flow through the
line (MW) for Case I and Case II
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (seconds)
Act
ive
Pow
er O
utpu
t of M
achi
ne-1
(p.
u.)
Fig. 27 Response of active power output of machine-1, Peo1 (pu) for
Case III
0 10 20 30 40 50 60-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
-3
Time (seconds)
Spe
ed d
evia
tions
, dw
1-3
(p.u
.)
Fig. 28 Response of difference of speed variations of machine-
1((dx1) and machine-3 (dx3), dx13 for Case III
0 10 20 30 40 50 60-8
-6
-4
-2
0
2
4
6
8x 10
-3
Time (seconds)
Spe
ed d
evia
tions
, dw
1-2
(p.u
.)
Fig. 29 Response of difference of speed variations of machine-
1((dx1) and machine-2 (dx2), dx12 for Case III
0 10 20 30 40 50 6030
40
50
60
70
80
90
100
110
Time (seconds)
d__t
heta
1-2
(deg
ree)
Fig. 30 Response of difference of rotor angle deviations dh (degree)
of machine-1 and machine-2, dh12 for Case III
Int J Syst Assur Eng Manag
123

Case I: Response of MMPS without SVC
Case II: Response of MMPS with SVC but no control
Case III : Response of MMPS with RCGA optimized
SVC-based controller
10 Conclusions
For designing the controller, a non-linear time-domain
simulation-based objective function is used and RCGA
optimization technique is employed to optimally tune the
parameters of the proposed controller.
The models of SMIB power system and MMPS are
developed using SimPowerSystems blockset. For modeling
SMIB power system and MMPS, different cases are con-
sidered (i) without SVC, (ii) with SVC but no control and
(iii) with genetically optimized SVC controller.
The simulation results show that the power system is
completely unstable without the use of SVC when a three
phase fault occurs on the transmission line. When we use
genetically optimized SVC, the power system becomes
stable after few cycles when fault occurs. Thus the proposed
SVC controller can generate variation of the control signals
and gives efficient damping to system oscillations due to
any disturbance and enhances the power system stability.
Appendix
A complete list of parameters used appears in the default
options of SimPowerSystems in the User’s Manual. All
data are in pu.
Generator 1, M1 SB = 2,100 MVA, H = 3.7 s,
VB = 13.8 kV, f = 60 Hz, RS = 2.8544e-3, Xd = 1.305,
Xd0 = 0.296, Xd
00 = 0.252, Xq = 0.474, Xq0 = 0.243,
Xq00 = 0.18, Td = 1.01 s, Td
0 = 0.053 s, Tqo
00= 0.1 s.,
Pe = 0.7 pu.
Generator 2, M2 SB = 4,200 MVA, H = 3.7 s,
VB = 13.8 kV, f = 60 Hz, RS = 2.8544e-3, Xd = 1.305,
Xd0 = 0.296, Xd
00 = 0.252, Xq = 0.474, Xq0 = 0.243,
Xq00 = 0.18, Td = 1.01 s, Td
0 = 0.053 s, Tqo00 = 0.1 s.,
Pe = 0.5267 pu.
Generator 3, M3 SB = 2,100 MVA, H = 3.7 s,
VB = 13.8 kV, f = 60 Hz, RS = 2.8544e-3, Xd = 1.305,
Xd0 = 0.296, Xd
00 = 0.252, Xq = 0.474, Xq0 = 0.243,
Xq00 = 0.18, Td = 1.01 s, Td
0 = 0.053 s, Tqo00 = 0.1 s.,
Pe = 0.7 pu.
Load at Bus1 250 MW
Transformer 1 2,100 MVA, 13.8/500 kV, 60 Hz,
R1 = R2 = 0.002, L1 = 0, L2 = 0.12, D1/Yg connection,
Rm = 500, Lm = 500
0 10 20 30 40 50 60-16
-14
-12
-10
-8
-6
-4
-2
Time (seconds)
d__t
heta
1-3
(deg
ree)
Fig. 31 Response of difference of rotor angle deviations dh (degree)
of machine-1 and machine-3, dh13 for Case III
0 10 20 30 40 50 60500
1000
1500
2000
2500
3000
Time (seconds)
Act
ive
Pow
er a
t Bus
-1 (
MW
)
Fig. 32 Response of active power at bus-1 or power flow through the
line for Case III
0 10 20 30 40 50 600.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
Time (seconds)
Vre
f (p.
u.)
Fig. 33 Reference voltage of SVC, Vref for Case III
Int J Syst Assur Eng Manag
123

Transformer 2 1,400 MVA, 13.8/500 kV, 60 Hz,
R1 = R2 = 0.002, L1 = 0, L2 = 0.12, D1/Yg connection,
Rm = 500, Lm = 500
Transformer 3 2,100 MVA, 13.8/500 kV, 60 Hz,
R1 = R2 = 0.002, L1 = 0, L2 = 0.12, D1/Yg connection,
Rm = 500, Lm = 500
Transmission lines 3-Ph, 60 Hz, length = 50 km,
100 km, 175/2 km, 175 km, R1 = 0.02546 X/km, R0 =
0.3864 X/km, L1 = 0.9337e-3 H/km, L0 = 4.1264e-
3 H/km, C1 = 12.74e-9 F/km, C0 = 7.751e-9F/km
Hydraulic turbine and governor Ka = 3.33, Ta = 0.07,
Gmin = 0.01, Gmax = 0.97518, Vgmin = 0.1 pu/s, Vgmax =
0.1 pu/s, Rp = 0.05, Kp = 1.163, Ki = 0.105, Kd = 0,
Td = 0.01 s, b = 0, Tw = 2.67 s each
Excitation system: TLP = 0.02 s, Ka = 200, Ta =
0.001 s, Ke = 1, Te = 0, Tb = 0, Tc = 0, Kf = 0.001,
Tf = 0.1 s, Efmin = 0, Efmax = 7, Kp = 0 each
Static var compensator 500 kV, ±200 MVAR, droop =
0.03
References
Chang Y, Xu Z (2007) A novel SVC supplementary controller based
on wide area signals. Electri Power Syst Res 77:1569–1574
Gyugyi L (1988) Power electronics in electric utilities: static var
compensators. IEEE Proc 76(4):483–494
Hingorani NG, Gyugyi L (2001) Understanding FACTS-concepts and
technology of flexible AC transmission systems. IEEE, New
York
Houari B, Gherbi FZ, Hadjeri S, Ghezal F (2007) Modelling and
simulation of static var compensator with Matlab. In: 4th
International Conference on Computer Integrated Manufacturing
CIP’2007
Kundur P (1993) Power system stability and control. McGraw-Hill
Inc., New York
Mathur RM, Varma R (2002) Thyristor-based FACTS controllers for
electrical transmission systems. IEEE, New York
Padiyar KR (2007) FACTS controller in power transmission and
distribution. New Age International (P) Limited, New Delhi
Panda S, Ardil C (2008) Real-coded genetic algorithm for robust
power system stabilizer design. Int J Electr Comput Syst Eng
2(1):6–14
Panda S, Padhy NP (2007) Power system with PSS and FACTS
controller: modeling, simulation and simultaneous tuning
employing genetic algorithm. Int J Electr Comput Syst Eng
1(1):9–18
Panda S, Padhy NP (2008) Comparison of particle swarm optimiza-
tion and genetic algorithm for FACTS-based controller design.
Appl Soft Comput, Elsevier 8(4):1418–1427
Panda S, Patidar NP, Singh R (2008) Simultaneous tuning of static var
compensator and power system stabilizer employing real-coded
genetic algorithm. World Acad Sci Eng Technol 41:1
SimPowerSystems 5.7 User’s Guide (2012) http://www.mathworks.
com/products/simpower/
Somsai K, Oonsivilai A, SRIKAEW A, Kulworawanichpong T
(2007) Optimal PI controller design and simulation of a static var
compensator using MATLAB’s SIMULINK. In: Proceedings of
the 7th WSEAS International Conference on Power Systems,
Beijing, China
Tang Y, Meliopoylos APS (1997) Power systems small signal
stability analysis with FACTS elements. IEEE Power Deliv
12(3):1352
Venkateswara Rao B, Nagesh Kumar GV, Ramya Priya M, Sobhan
PVS (2009) Implementation of static VAR compensator for
improvement of power system stability. In: International Con-
ference on Advances in Computing, Control, and Telecommu-
nication Technologies, pp. 453–457
Zhou EZ (1993) Application of static var compensators to increase
power system damping. IEEE Trans Power Syst 8(2):655
Int J Syst Assur Eng Manag
123