Embed Size (px)
Citation preview

Improved Urban Navigation with Collaborative Shadow
Matching and Specular Matching in FormationKirsten Strandjord, Penina Axelrad, Shan Mohiuddin

2
Urban Challenges -Visibility
‒ A growing number of location-based services rely on GPS
technology for personal and commercial navigation.
‒ Expect these services to work reliably in all environments.
‒ Conventional methods for GPS positioning perform poorly.
‒ Tall, densely spaced buildings, block many of the direct line-of-
sight (DLOS) signals from GPS satellites.
‒ GPS user cannot obtain an accurate position solution.

3
Urban Challenges - Geometry
‒ The geometry of the satellites that are visible is usually poor due
to the nature of urban canyons.
‒ Signals that have a LOS along the direction of the city street are
likely to be visible.
‒ Signals in the across-street direction are likely to be blocked by a
wall of tall buildings.

4
Urban Challenges - Reflections
‒ GPS signal reflections prevalent due to the geometry of urban canyons
and the nature of the often highly reflective building materials
‒ The signal does not travel entirely along the DLOS vector direction but
the non-line-of-sight (NLOS) signal
‒ Reaches the receiver after it has been reflected or diffracted by a surface
in the environment

5
Background –Shadow Matching (SM) BasicsTechnique that finds most likely user location using the GPS satellite visibility
predictions from the 3D model compared to the observed SNR values (Groves
2012)
Signal from the satellite visible to a receiver in some locations and blocked
in other locations within the canyon

6
Background –SM General ProcedureSM techniques have shown results of meter-level accuracies in the across-
street direction in dense urban areas
1. Select a search radius around the a priori position solution.
2. Select a set of candidate locations
3. At each candidate location, use the building model to predict the visibility
of each satellite
4. Scoring scheme compares the visibility predictions to the signal strength
values.
5. Each candidate location receives a score that represents the likelihood
the GPS user is located at that particular position.
𝑓𝑝𝑜𝑠 𝑝 =
𝑠=1
𝑚
𝑓𝑠𝑎𝑡 𝑠, 𝑝, 𝑆𝑆
Score: 𝑓𝑝𝑜𝑠 candidate: 𝑝 scoring scheme: 𝑆𝑆 each satellite: 𝑠
𝑚: satellites above the horizon

7
Background –SM Scoring Schemes
7
𝑝 𝐿𝑂𝑆 𝑆𝑁𝑅 = 𝑠 =𝑙𝑠
𝑙𝑠 + 𝑛𝑠
𝑃𝑚 = 1 − 𝑝 𝐿𝑂𝑆 𝑆𝑁𝑅 = 𝑠 − 𝑏 + 2𝑏 𝑝 𝐿𝑂𝑆 𝑆𝑁𝑅 = 𝑠
𝑃𝑚, candidate score for each satellite;
b is 0.85 if the satellite is predicted to be visible and 0.2
otherwise
BINARY TERNARY
BAYESIAN Wang, et al., 2015
Wang, et al., 2012Groves

8
Denver Downtown Characteristics
Denver’s rapid-growth, with a corresponding
increase in high-rise building developments, creates
complications for GNSS-dependent commuters.
December 2018 the buildings surrounding the stops
and stations along the metro commuter rail network
appeared to be causing GNSS signal cutouts

9
Denver Experiment Locations
To get a realistic set of urban tracking results, we performed three experiments
(Exp1, Exp2, and Exp3) in downtown Denver

Software Structure and Inputs
10

11
Visibility Metric & Specularity Metric
ത𝐿 = −2 ത𝑛 ∙ ഥ𝐷 ത𝑛 + ഥ𝐷
ത𝐿 ∙ ത𝑅 ≥ 0.99
Formulation of a specularity metric which is used and stored in sky plots similar
to shadow matching method.

12
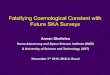
SNR & Specularity Metric
• GLONASS PRN 4 in Exp1, GPS PRN 10 in Exp2, and GPS PRN 5 in Exp3 are
all significantly blocked by buildings.
• Receivers record high SNR levels for these satellites at various times during the
experiment; which correlate with the prediction of a high likelihood of specularity

13
SNR & Specularity Metric
Observed SNR vs specularity
metric for satellites with predicted
blockage of DLOS signals.
- Signals tracked with high SNRs are
correlated with high specularity metric

14
Visibility Metric & Specularity Metric
In Exp2 and Exp3, though the receivers (R1-R4) are all near one another (within
several meters), the visibility and specularity sky plot vary between receivers.

15
Results

16
Results

17
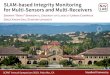
Specular Matching Results
The specular matching method
outperforms the conventional SM
scoring scheme for each receiver
for all experiments.

18
Future Investigation
• Performing additional experiments in diverse regions in Denver using
higher performance receivers
• Focusing on the practical implementation of the SPM method, including
calculating the computation times and database requirements for the
generation and storage of specularity sky plots for all of downtown Denver
• Incorporating knowledge into the model regarding building materials or by
verifying reflective building surfaces through sampled or crowdsourced
SNR data

Thank you for your attention.
19footer
Questions?

References
20footer
[1] P. Groves, "Multipath vs. NLOS signals," Inside GNSS, no. Nov/Dec, pp. 40-42, 2013.
[2] P. Groves, Z. Jiang, M. Rudi and P. Strode, "A Portfolio Approach to NLOS and Multipath Mitigation in Dense Urban Areas," Proceeding of ION-GNSS+2013, Institute of Navigation Nashville, TN, no. September, pp. 3231-3247, 2013.
[3] U. S. C. Bureau, "Annual Estimates of the Resident Population for Incorporated Places of 50,000 or More, Ranked by July 1, 2018 Population: April 1, 2010 to July 1, 2018," Population Division, 2019.
[4] J. Aguilar, "Denver's tall buildings partly to blame for A-Line, G-Line problems, RTD tells feds," Denver Post, 17 December 2018.
[5] International Telecommunication Union - Radiocommunication Sector, "Effects of building materials and structures -RecommendationITU-R P.2040-1," Electronic Publication, 2015.
[6] P. Groves, "Shadow Matching: A New GNSS Positioning Technique for Urban Canyons," Journal of Navigation, vol. 64, no. 3, pp. 417-430, 2011.
[7] P. Groves and M. Adjrad, "Enhancing Micro Air Vehicle Navigatin in Dense Urban Areas using 3D Mapping Aided GNSS," in 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, 2017.
[8] P. Groves and M. Adjrad, "Likelihood-based GNSS positioning using LOS/NLOS predictions from 3D mapping and pseudoranges," GPS Solutions, 2017.
[9] L. Wang, P. Groves and M. Ziebart, "GNSS Shadow Matching: Improving Urban Positioning Accuracy Using a 3D City Model with Optimized Visibility Prediction Scoring," Navigation, no. November, pp. 44-56, 2012.
[10] R. Yozevitch and B. Ben Moshe, "A Robust Shadow Matching Algorithm for GNSS Positioning," Journal of the Institute of Navigation, vol. 62, no. 2, pp. 95-109, 2015.
[11] L. Wang, P. Groves and M. Ziebart, "Smartphone shadow matching for better cross-street GNSS positioning in urban environments," Journal of Navigation, vol. 68, no. 3, pp. 411-433, 2015.
[12] L. Wang, P. Groves and M. Ziebart, "Multi- Constellation GNSS Performance Evaluation for Urban Canyons Using Large Virtual Reality City Models," Journal of Navigation, vol. 65, no. 3, pp. 459-476, 2012.
[13] J. Meguro, "GPS Multipath Mitigation for Urban Area Using Omnidirectional Infrared Camera," IEEE Transactions on Intelligent Transportation Systems, vol. 10, no. 1, pp. 22-30, 2009.
[14] P. Groves, Z. Jiang, L. Wang and M. Ziebart, "Intelligent Urban Positioning using MultiConstellation GNSS with 3D Mapping and
NLOS," Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (Ion Gnss 2012), pp. 458-472, 2012.

References
21footer
[15] M. Adjrad and P. Groves, "Enhancing Least Squares GNSS Positioning with 3D Mapping without Accurate Prior Knowledge," Navigation - Journal of
The Institute of Navigation , no. March, pp. 75-94, 2017.
[16] D. Betaille, F. Peyret, M. Ortiz, S. Miquel and L. Fontenay, "A New Modeling Based on Urban Trenches to Improve GNSS Positioning Quality of
Service in Cities," IEEE Intelligent Transportation Systems Magazine, vol. 5, no. 3, pp. 59-70, 2013.
[17] A. Bourdeau, M. Sahmoudi and J.-Y. Tourneret, "Tight Integration of GNSS and a 3D City Model for Robust Positioning in Urban Canyons,"
Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), pp. 1263-1269, 2012.
[18] J. Bradbury , M. Ziebart, and P. Cross, "Code Multipath Modelling in the Urban Environment Using Large Virtual Reality City Models: Determining the
Local Environment," Journal of Navigation, pp. 95-10, 2007.
[19] P. Groves and Z. Jiang, "Height Aiding, C/N0 Weighting and Consistency Checking for GNSS NLOS and Multipath Mitigation in Urban Areas.," Journal
of Navigation, vol. 66, p. 653–669., 2013.
[20] L. Hsu, Y. Gu and S. Kamijo, "3D building model-based pedestrian positioning method using GPS/GLOANSS/QZSS and its reliability calculation," GPS
Solutions, vol. 20, p. 413–428, 2016.
[21] N. Kbayer, M. Sahmoudi and E. Chaumette, "Robust GNSS Navigation in Urban Environments by Bounding NLOS Bias of GNSS Pseudoranges Using
a 3D City Model.," Proceedings of ION GNSS+ 2015, 2015.
[22] R. Kumar and M. G. Petovello, "A Novel GNSS Positioning Technique for Improved Accuracy in Urban Canyon Scenarios Using 3D City Model,"
Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation, pp. 2139-2148, 2014.
[23] M. Obst, S. Bauer and G. Wanielik, "Urban Multipath Detection and mitigation with Dynamic 3D Maps for Reliable Land Vehicle Localization. .,"
IEEE/ION PLANS, pp. 685-691, 2012.
[24] S. Peyraud, D. Bétaille, S. Renault, M. Ortiz, F. Mougel, D. Meizel and F. Peyret, "About Non-Line- Of-Sight Satellite Detection and Exclusion in a
3DMap-Aided Localization Algorithm. Sensors,," Sensors, p. 829–847, 2013.
[25] T. Suzuki and N. Kubo, "GNSS Positioning with Multipath Simulation using 3D Surface Model in Urban Canyon. ION GNSS 2012, Nashville, TN,"
Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation, pp. 438-447, 2012.
[26] S. Miura, L.-T. Hsu, . F. Chen and S. Kamijo, "GPS Error Correction With Pseudorange Evaluation Using Three-Dimensional Maps," IEEE
Transactions on Intelligent Transportation Systems, pp. 3104-3115, 2015.
[27] S. Tanwar and G. Gao, "Decentralized Collaborative Localization in Urban in Urban Environments using 3D-Mapping-Aided (3DMA) GNSS and Inter-
Agent Ranging," Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), no.
September, pp. 2352 - 2363, 2018.
[28] K. Strandjord and P. Axelrad, "Framework and Techniques for Cooperative Group Situational," Proceedings of the 30th International Technical Meeting
of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), pp. 253-270, 2018.
[29] DRCOG, "Building Roofprints 2016," DRCOG, 2016. [Online]. Available: https://data.drcog.org/dataset/building-roofprints-2016.
[30] M. Pharr and G. Humphreys, Physically Based Rendering: From Theory to Implementation, 2010.