Embed Size (px)
Citation preview
1
Implementation of Linear Predictive Coding (LPC) of Speech
213A class projectSpring 2000
Jean François Frigon and Vladislav Teplitsky
Implementation of LPC
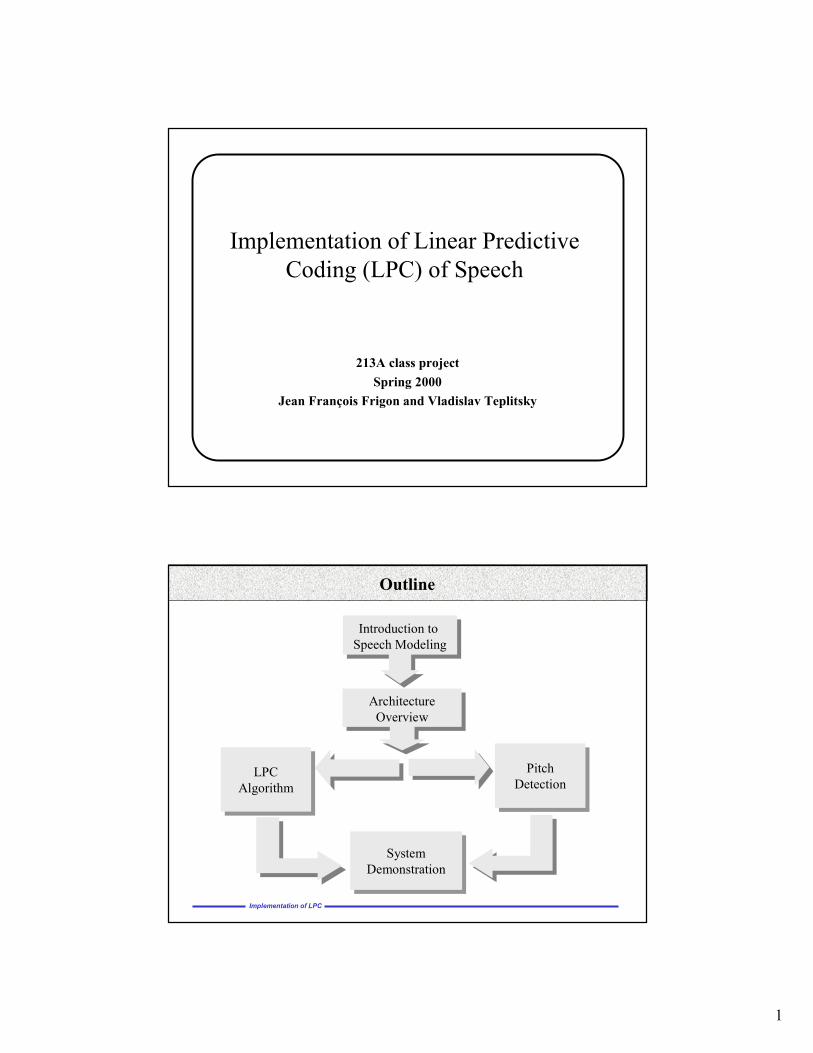
Outline
Introduction to Speech ModelingIntroduction to
Speech Modeling
ArchitectureOverview
ArchitectureOverview
SystemDemonstration
SystemDemonstration
LPCAlgorithm
LPCAlgorithm
PitchDetection
PitchDetection

2
Speech Modeling – Non-stationary
Implementation of LPC
• Speech is a highly non-stationary signal• Dynamically changes over time• Changes occur very quickly
Speech Modeling – Frame Blocking
Implementation of LPC
• Need to analyze the signal over many short segments, called frames
• Apply a short-duration (usually 20-30 msec) overlapping window (usually Hamming) to the speech signal in order to segment into frames
• A single frame of speech is stationary – perform analysis
3
Implementation of LPC
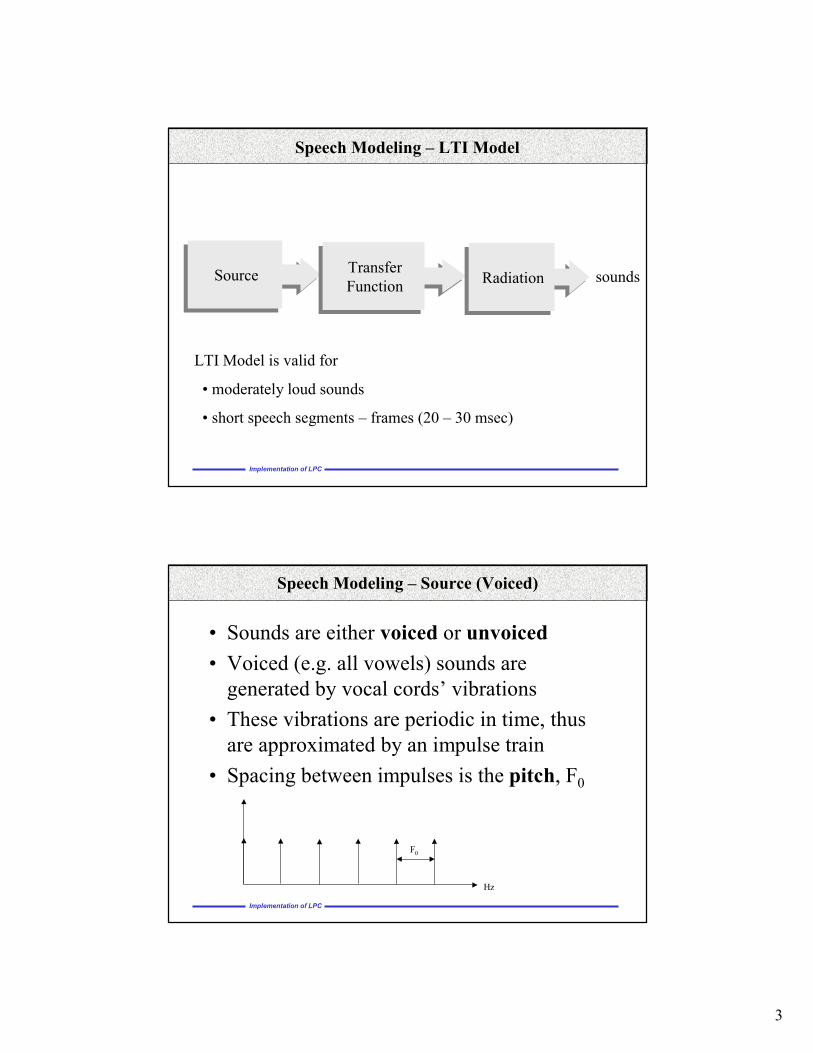
Speech Modeling – LTI Model
SourceSource TransferFunctionTransferFunction RadiationRadiation sounds
LTI Model is valid for
• moderately loud sounds
• short speech segments – frames (20 – 30 msec)
Speech Modeling – Source (Voiced)
Implementation of LPC
• Sounds are either voiced or unvoiced• Voiced (e.g. all vowels) sounds are
generated by vocal cords’ vibrations• These vibrations are periodic in time, thus
are approximated by an impulse train• Spacing between impulses is the pitch, F0
F0
Hz
4
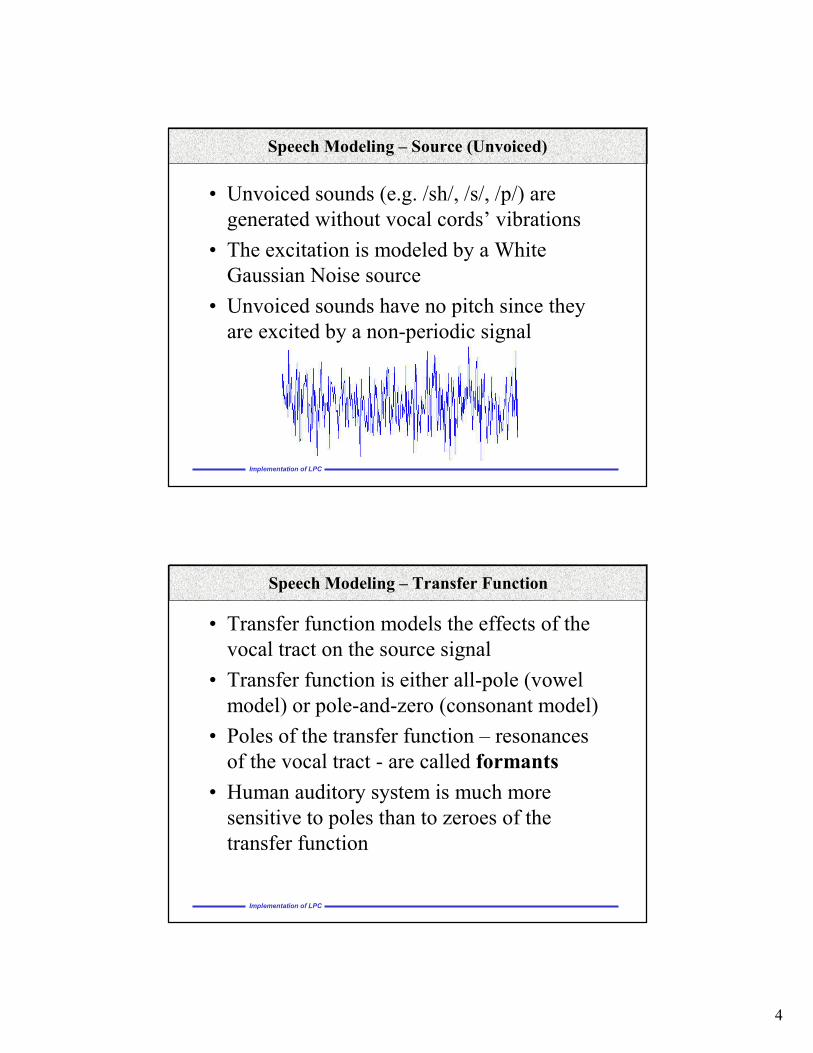
Speech Modeling – Source (Unvoiced)
Implementation of LPC
• Unvoiced sounds (e.g. /sh/, /s/, /p/) are generated without vocal cords’ vibrations
• The excitation is modeled by a White Gaussian Noise source
• Unvoiced sounds have no pitch since they are excited by a non-periodic signal
Implementation of LPC
Speech Modeling – Transfer Function
• Transfer function models the effects of the vocal tract on the source signal
• Transfer function is either all-pole (vowel model) or pole-and-zero (consonant model)
• Poles of the transfer function – resonancesof the vocal tract - are called formants
• Human auditory system is much more sensitive to poles than to zeroes of the transfer function
5
Speech Modeling – Transfer Function
Implementation of LPC
• We will consider only an all-pole transfer function of the form:
• where G is the gain, p is the order (number of poles), and ai is the pole.
• p ≈ 2×Bandwidth of signal (in kHz)+[2,3,4]• e.g. BW=4 kHz, then
p = 2×4 + [2,3,4] ∈ [10,11,12]
∏=
−−= p
iii aa
GzH
1
* )1)(1()(
Implementation of LPC
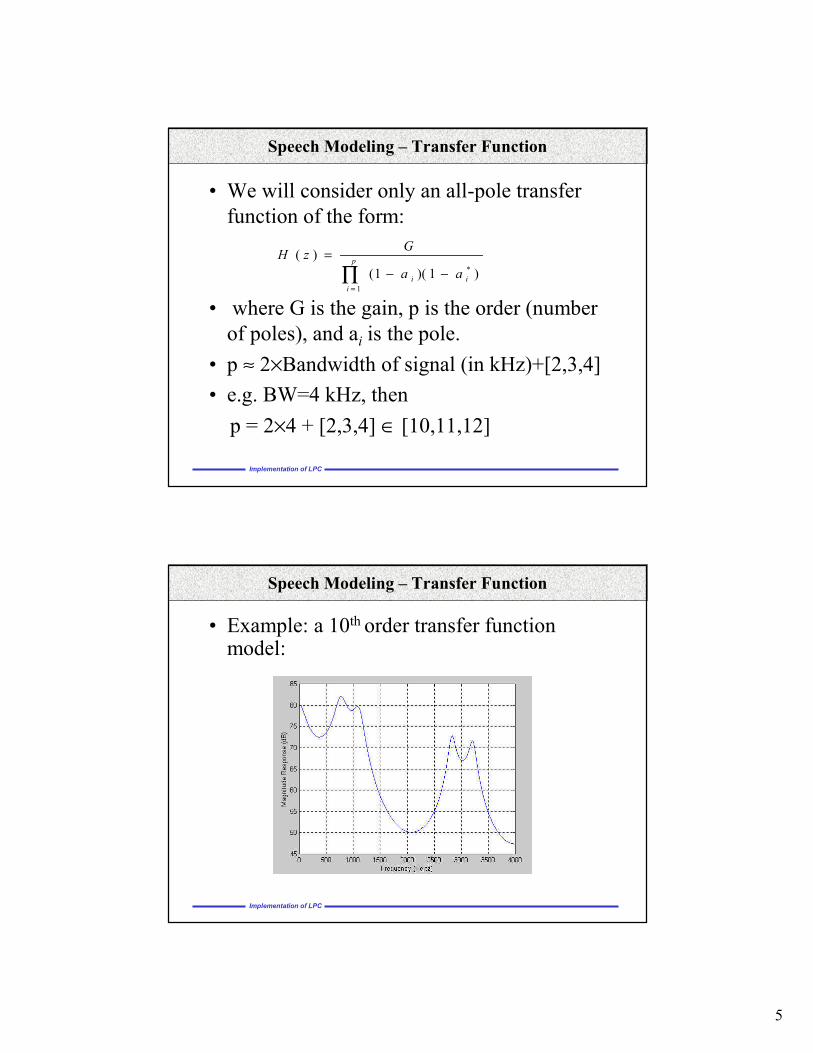
Speech Modeling – Transfer Function
• Example: a 10th order transfer function model:
6
Speech Modeling – Radiation
Implementation of LPC
• Models how sound is radiated by the lips• Usually approximated by a digital
differentiator:
• Radiation is not important for classification of a sound
• Thus, we will omit it from our implementation
11)( −−= zzR
Implementation of LPC
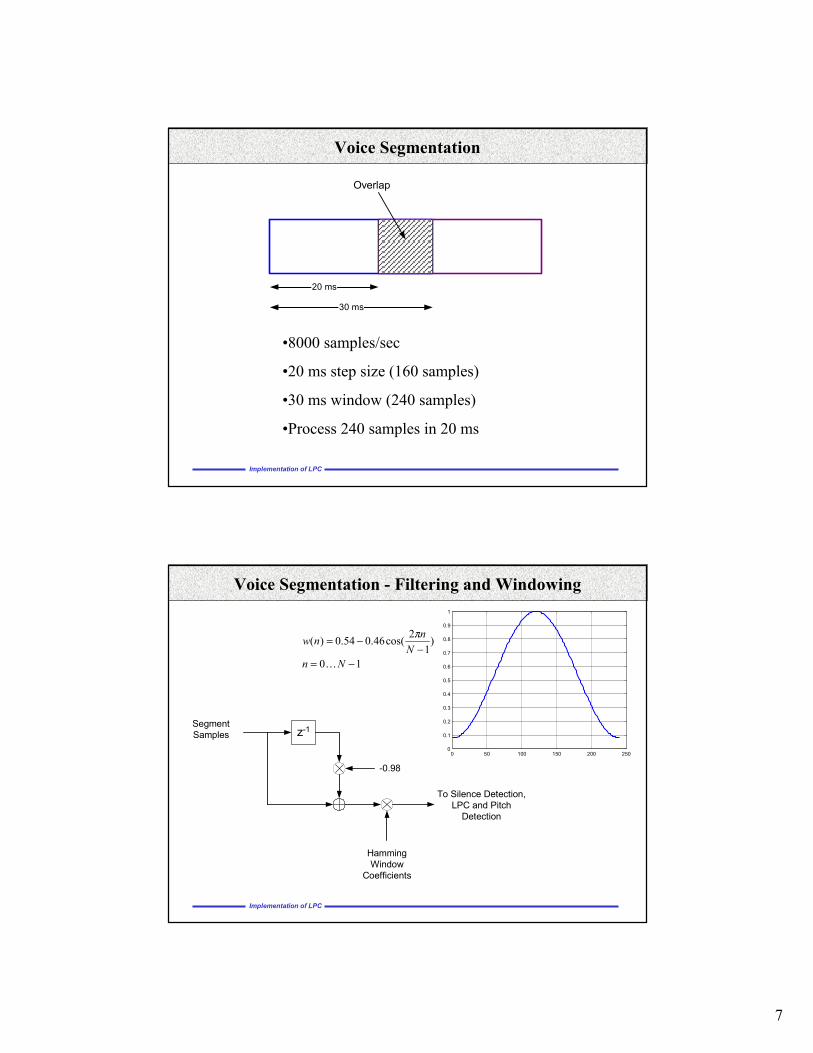
Architecture Overview
VoiceVoice SegmentationSegmentation
PitchDetection
PitchDetectionLPCLPC
Parameters:•Silence
•LPC Coeff.•Gain
•Voiced/Unvoiced•Pitch Frequency
Parameters:•Silence
•LPC Coeff.•Gain
•Voiced/Unvoiced•Pitch Frequency ChannelChannel LPC
SynthesizerLPC
Synthesizer
7
Implementation of LPC
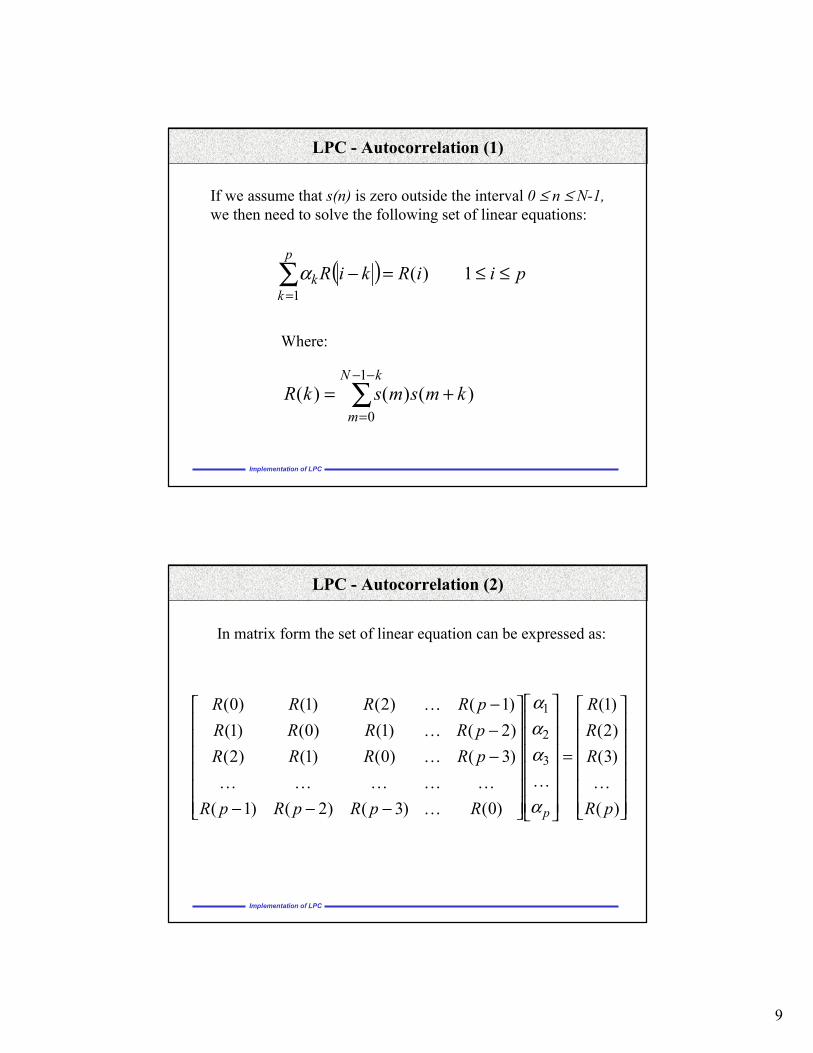
Voice Segmentation
20 ms
30 ms
Overlap
•8000 samples/sec
•20 ms step size (160 samples)
•30 ms window (240 samples)
•Process 240 samples in 20 ms
Implementation of LPC
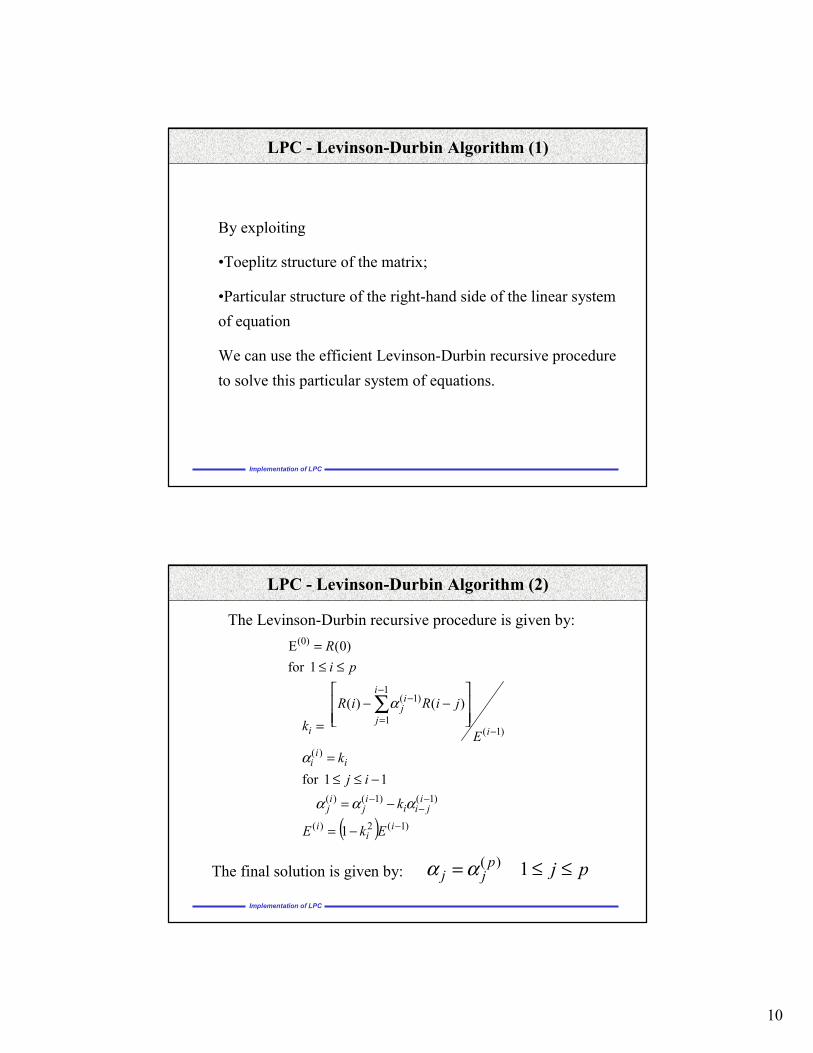
Voice Segmentation - Filtering and Windowing
z-1
-0.98
SegmentSamples
HammingWindow
Coefficients
To Silence Detection,LPC and Pitch
Detection
0 50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
10
)1
2cos(46.054.0)(
−=−
−=
NnN
nnw
�
π

8
Implementation of LPC
Voice Segmentation - Silence Detection
Compute R(0)Compute R(0)
Is R(0) > R(0) for Background
Noise
Is R(0) > R(0) for Background
NoiseYesYesNoNo
Compute LPCand PitchDetection
Compute LPCand PitchDetection
SilencePeriod: Stop Algorithm
and set G2=0
SilencePeriod: Stop Algorithm
and set G2=0
Implementation of LPC
LPC - Motivation
Speech Difference Equation for a pth order filter:
∑=
+−=p
kk nGuknsans
1)()()(
Want to minimize the mean-squared prediction error:
∑=
−−=p
kk knsnsne
1)()()( α
For a single input impulse or stationary white noise, the obtained coefficients are identical to the ak’s
9
Implementation of LPC
LPC - Autocorrelation (1)
If we assume that s(n) is zero outside the interval 0 ≤ n ≤ N-1, we then need to solve the following set of linear equations:
( ) piiRkiRp
kk ≤≤=−∑
=1)(
1α
Where:
∑−−
=+=
kN
mkmsmskR
1
0)()()(
Implementation of LPC
LPC - Autocorrelation (2)
In matrix form the set of linear equation can be expressed as:
=
−−−
−−−
)(
)3()2()1(
)0()3()2()1(
)3()0()1()2()2()1()0()1()1()2()1()0(
3
2
1
pR
RRR
RpRpRpR
pRRRRpRRRRpRRRR
p
��
�
�����
�
�
�
α
ααα
10
Implementation of LPC
LPC - Levinson-Durbin Algorithm (1)
By exploiting
•Toeplitz structure of the matrix;
•Particular structure of the right-hand side of the linear system of equation
We can use the efficient Levinson-Durbin recursive procedure to solve this particular system of equations.
Implementation of LPC
LPC - Levinson-Durbin Algorithm (2)
The Levinson-Durbin recursive procedure is given by:
( ) )1(2)(
)1()1()(
)(
)1(
1
1
)1(
(0)
1
11for
)()(
1for )0(E
−
−−
−
−
−
=
−
−=
−=
−≤≤=
−−
=
≤≤=
∑
ii
i
ijii
ij
ij
ii
i
i
i
j
ij
i
EkE
k
ijk
E
jiRiRk
piR
ααα
α
α
The final solution is given by: pjpjj ≤≤= 1)(αα

11
Implementation of LPC
LPC - Gain Coefficient
It can be shown that the gain coefficient is given by:
∑=
=−=p
knk EkRRG
1
2 )()0( α
Where En is the minimum mean squared error prediction and is given by E(p) from Levinson-Durbin’s Algorithm.
We will transmit G2.
Implementation of LPC
LPC Algorithm
From Segmentation:s(n) and R(0)
From Segmentation:s(n) and R(0)
Compute R(i) 1 ≤ i ≤ pCompute R(i) 1 ≤ i ≤ p
Levinson-Durbin’s Algorithm:Find αi 1 ≤ i ≤ p
and G2
Levinson-Durbin’s Algorithm:Find αi 1 ≤ i ≤ p
and G2Transmit
to decoderTransmit
to decoder

12
Pitch Detection - Motivation
Implementation of LPC
• Recall that source can be either a periodic impulse train spaced by F0 or random noise
• Autocorrelation function of a speech frame:
• If x(n) is periodic in N, then R(k) is also periodic in N
• Thus, we can compute R(k) and check if it’s periodic
∑−−
=
+=1
0)()()(
kN
mkmxmxkR
Implementation of LPC
Pitch Detection – Motivation
• First we clip the frame using 3-level center clipping function:
• That is:
CL
-CL
+1
-1
otherwiseCnxif
CnxifnxC L
L
−<>
−+
= )()(
011
)]([
x(n)
C[x(n)]

13
Implementation of LPC
Pitch Detection – Motivation
• Next we compute the modified autocorrelation function:
• where can have only 3 different values:
∑−−
=
+=1
0
)()()(kN
mn kmxmxkR
)()( kmxmx +
0)(0)()()()()(
011
)()(=+=
+≠+=
−+
=+kmxormxifkmxmxifkmxmxif
kmxmx
Implementation of LPC
Pitch Detection – Motivation
• We don’t need to compute for all values of k (i.e. 0 ≤ k ≤ N)
• Thus we only need to look in the range:80 Hz ≤ F0 ≤ 350 Hz
)(kRn
20080men350150women
F0 (Hz) maxF0 (Hz) min
14
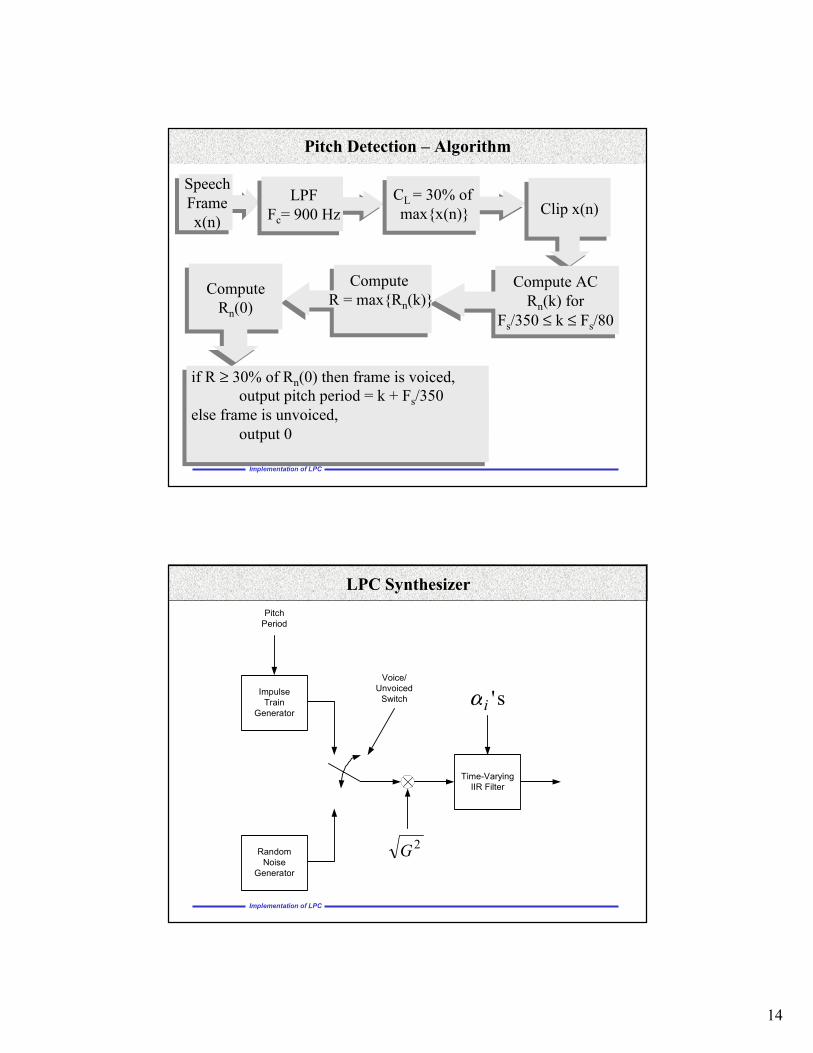
Pitch Detection – Algorithm
SpeechFramex(n)
SpeechFramex(n)
LPFFc= 900 Hz
LPFFc= 900 Hz
CL = 30% of max{x(n)}CL = 30% of max{x(n)} Clip x(n)Clip x(n)
Compute ACRn(k) for
Fs/350 ≤ k ≤ Fs/80
Compute ACRn(k) for
Fs/350 ≤ k ≤ Fs/80
Compute R = max{Rn(k)}
Compute R = max{Rn(k)}Compute
Rn(0)Compute
Rn(0)
if R ≥ 30% of Rn(0) then frame is voiced, output pitch period = k + Fs/350
else frame is unvoiced, output 0
if R ≥ 30% of Rn(0) then frame is voiced, output pitch period = k + Fs/350
else frame is unvoiced, output 0
Implementation of LPC
Implementation of LPC
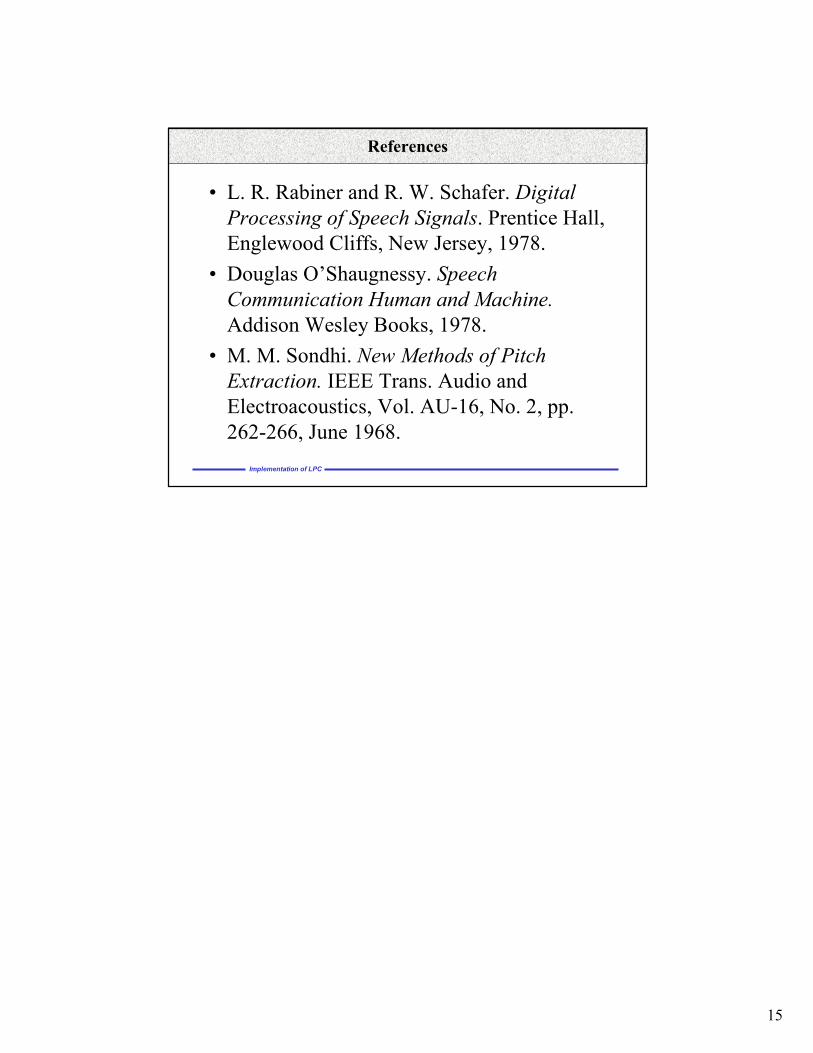
LPC Synthesizer
ImpulseTrain
Generator
PitchPeriod
RandomNoise
Generator
Voice/Unvoiced
Switch
2G
Time-VaryingIIR Filter
s'iα
15
References
Implementation of LPC
• L. R. Rabiner and R. W. Schafer. Digital Processing of Speech Signals. Prentice Hall, Englewood Cliffs, New Jersey, 1978.
• Douglas O’Shaugnessy. Speech Communication Human and Machine.Addison Wesley Books, 1978.
• M. M. Sondhi. New Methods of Pitch Extraction. IEEE Trans. Audio and Electroacoustics, Vol. AU-16, No. 2, pp. 262-266, June 1968.



![Predictive Coding Introduction Predictive Coding - TU · PDF fileOperational distortion rate function of a predictive coding ... [Makhoul, 1975, Vaidyanathan, 2008, Gray, 2010] 2 U](https://img.pdfslide.us/doc/110x75/5aa4d3607f8b9afa758c6555/predictive-coding-introduction-predictive-coding-tu-distortion-rate-function.jpg)


![Chapter 1 · Linear Prediction Coding (LPC)[10], LPC-derived Cepstrum (LPCC)[11], Mel Frequency Cepstrum Coefficient (MFCC)[12], and Perceptual Linear Predictive analysis (PLP)[13],](https://img.pdfslide.us/doc/110x75/5ebf8e7c34062f242163c649/chapter-1-linear-prediction-coding-lpc10-lpc-derived-cepstrum-lpcc11-mel.jpg)



![PREDICTIVE CODING AND THE PROPORTIONALITY … · PREDICTIVE CODING AND THE PROPORTIONALITY DOCTRINE: A MARRIAGE MADE IN BIG DATA Ralph C. Losey* ... 2013] PREDICTIVE CODING AND THE](https://img.pdfslide.us/doc/110x75/5b9279b509d3f280378b5f70/predictive-coding-and-the-proportionality-predictive-coding-and-the-proportionality.jpg)


















