Embed Size (px)
Citation preview

Image-Language Association:are we looking at the right features?
Katerina Pastra
Language Technology Applications,
Institute for Language and Speech Processing, Athens, Greece
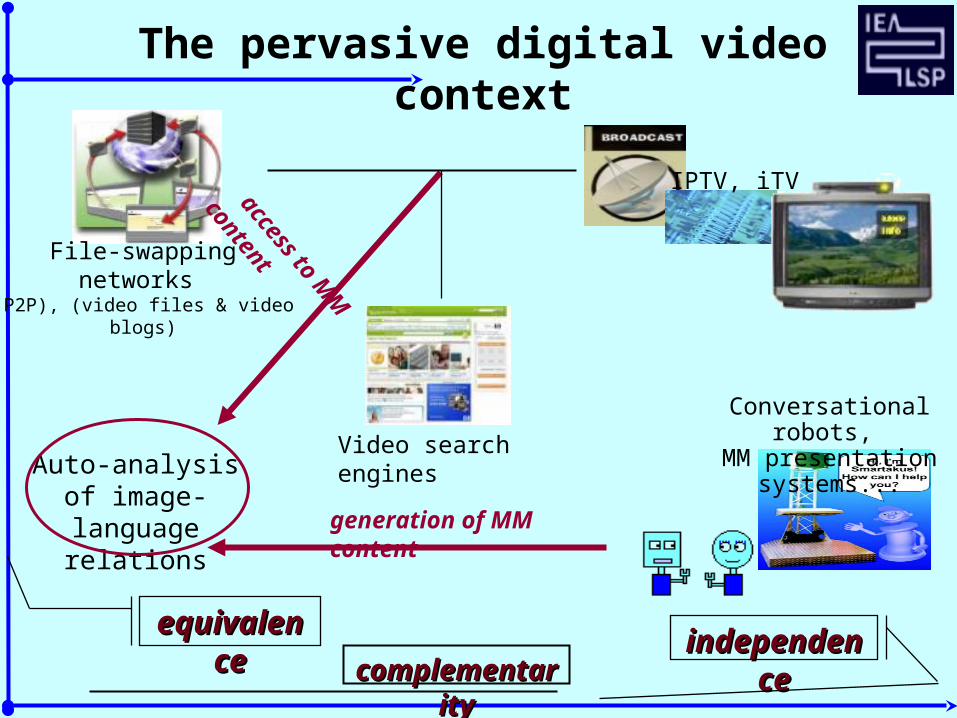
The pervasive digital video context
File-swapping networks (P2P), (video files & video blogs)
IPTV, iTV
Video search engines
Conversational robots, MM presentation systems...
acce
ss to
MM
cont
ent
generation of MM content
Auto-analysis of image-language
relations
complementaritycomplementarityindependenceindependenceequivalenceequivalence
Overview
Focus on semantic equivalence relation = Multimedia Integration = image-language association Brief review of state of the art association mechanisms – feature sets used The OntoVis feature set suggestion Using OntoVis in the VLEMA prototype Prospects for going from 3D to 2D Future plans and conclusions
Association Mechanisms in prototypes
Intelligent MM systems from SHRDLU to conversational robots of new millennium (Pastra and Wilks 2004):
Simulated or manually abstracted visual input is used to avoid difficulties in image analysis Integration resources used with a priori known associations (e.g. image X on screen is a “ball”), or allowing simple inferences e.g. matching an input image to an object-model in the resource, which is in its turn linked to a “concept/word” )
to avoid difficulties in associating V-L Applications are restricted to blocksworlds/miniworlds
scaling issues
Association algorithms
To be embedded in prototypes: Probabilistic approaches for learning (e.g. Barnard et al. 2003)
use word/phrase + image/image region (f-v vectors) require properly annotated corpora (IBM, Pascal etc.)
Logic-based approaches (e.g. Dasiopoulou et al. 2004)
use feature-augmented ontologies match low-level image features + leaf nodes Use of both approaches reported too (Srikanth et al. 2005)
Feature set used:Feature set used:shape, colour, texture, position, sizeshape, colour, texture, position, size
Scaling?Scaling?
The quest for the appropriate f-set
Constraints in defining a f-set: Features must be distinctive of object classes (at the basic-level)
Feature values must be detectable by image
analysis modules
Cognitive thesis:No feature set is fully representative of the characteristics of an object, but one may be more or less successful in fixing the reference of the corresponding concept (word)
The OntoVis suggestion
Feature-set suggested• physical structure: the number of parts into which an object is expected to be decomposed in different dimensions • visually verifiable functionality: visual characteristics an object may have which are related to its function, &• interrelations: relative location of objects, relative size
A domain model Ontology + KBasefor static indoor scenes (sitting rooms in 3D – XI KR language)
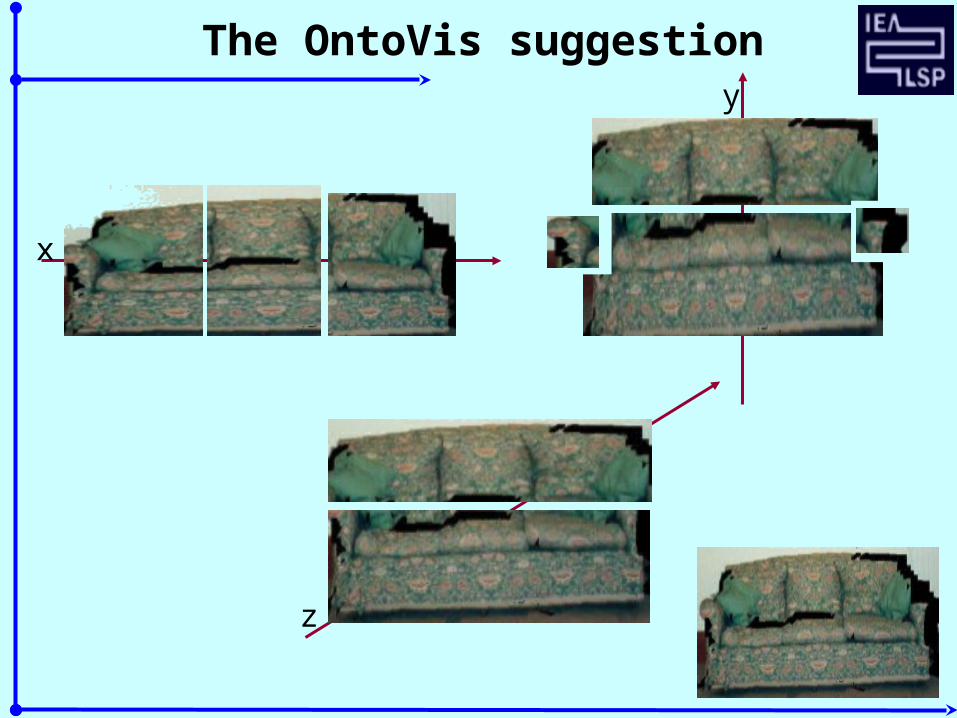
The OntoVis suggestion
x
y
z
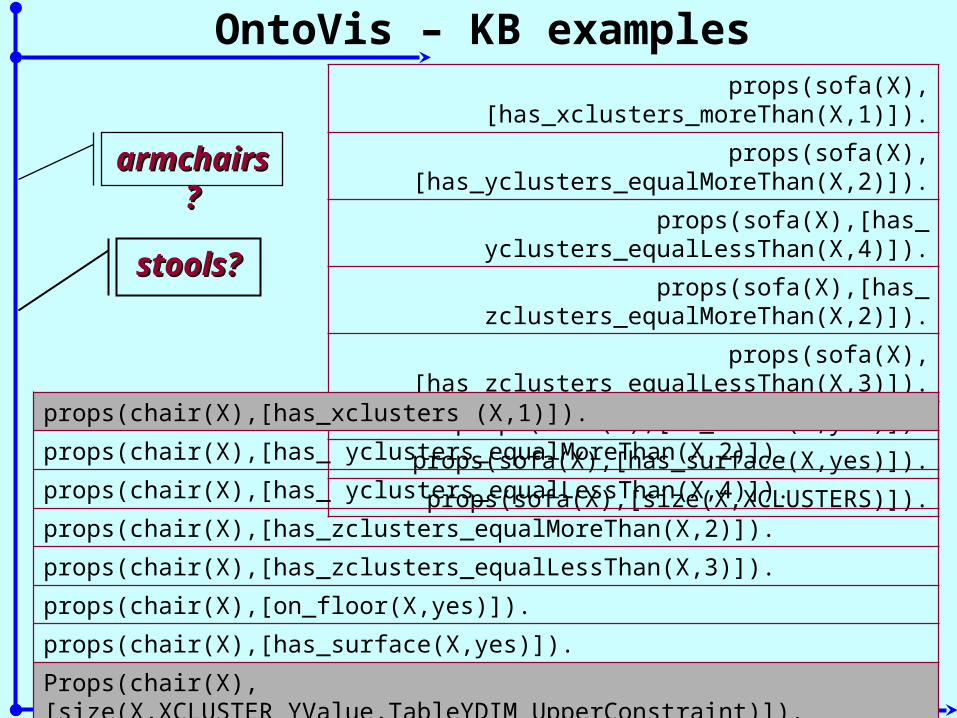
OntoVis – KB examplesprops(sofa(X),[has_xclusters_moreThan(X,1)]).
props(sofa(X),[has_yclusters_equalMoreThan(X,2)]).
props(sofa(X),[has_ yclusters_equalLessThan(X,4)]).
props(sofa(X),[has_ zclusters_equalMoreThan(X,2)]).
props(sofa(X),[has_zclusters_equalLessThan(X,3)]).
props(sofa(X),[on_floor(X,yes)]).
props(sofa(X),[has_surface(X,yes)]).
props(sofa(X),[size(X,XCLUSTERS)]).
props(chair(X),[has_xclusters (X,1)]).
props(chair(X),[has_ yclusters_equalMoreThan(X,2)]).
props(chair(X),[has_ yclusters_equalLessThan(X,4)]).
props(chair(X),[has_zclusters_equalMoreThan(X,2)]).
props(chair(X),[has_zclusters_equalLessThan(X,3)]).
props(chair(X),[on_floor(X,yes)]).
props(chair(X),[has_surface(X,yes)]).
Props(chair(X),[size(X,XCLUSTER_YValue,TableYDIM_UpperConstraint)]).
armchairs?armchairs?
stools?stools?
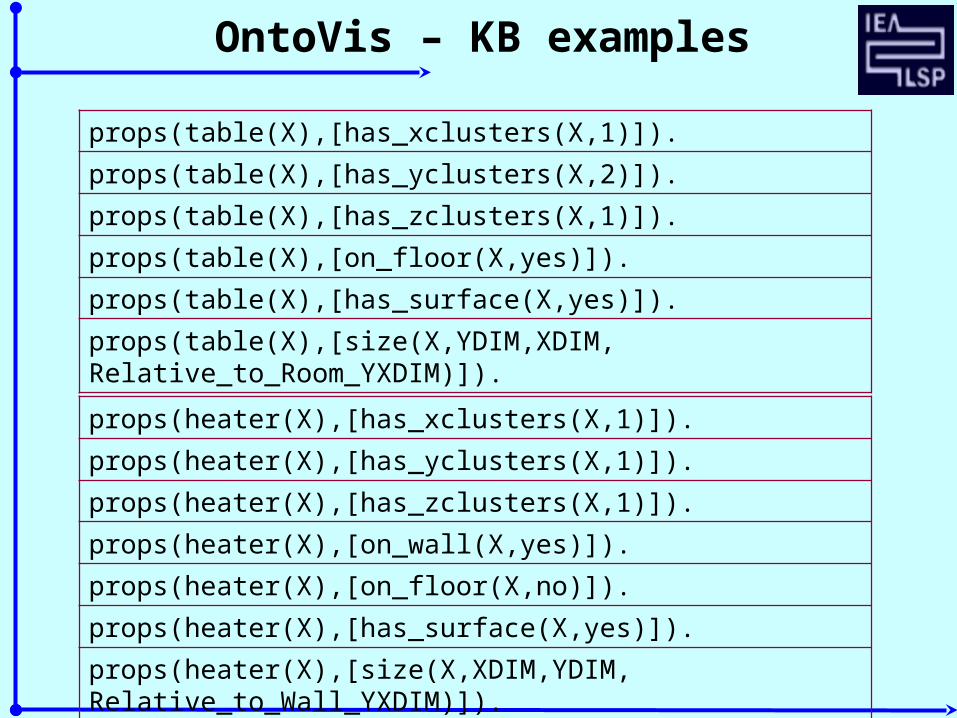
OntoVis – KB examples
props(table(X),[has_xclusters(X,1)]).
props(table(X),[has_yclusters(X,2)]).
props(table(X),[has_zclusters(X,1)]).
props(table(X),[on_floor(X,yes)]).
props(table(X),[has_surface(X,yes)]).
props(table(X),[size(X,YDIM,XDIM, Relative_to_Room_YXDIM)]).
props(heater(X),[has_xclusters(X,1)]).
props(heater(X),[has_yclusters(X,1)]).
props(heater(X),[has_zclusters(X,1)]).
props(heater(X),[on_wall(X,yes)]).
props(heater(X),[on_floor(X,no)]).
props(heater(X),[has_surface(X,yes)]).
props(heater(X),[size(X,XDIM,YDIM, Relative_to_Wall_YXDIM)]).

OntoVis F-set advantages
It generalizes over visual appearance differences (e.g. different styles of sofas)
It goes beyond viewpoint (view angle + distance) differences
It can be used to reason on object id by analogy (e.g. to describe “sofa-like” objects if not certain)
Using OntoVis
VLEMA: A Vision-Language intEgration MechAnism
Input: automatically re-constructed static scenes in
3D (VRML format) from RESOLV (robot-surveyor) Integration task: Medium Translation
from images (3D sitting rooms)
to text (what and where in EN) Domain: estates surveillance Horizontal prototype Implemented in shell programming and ProLog
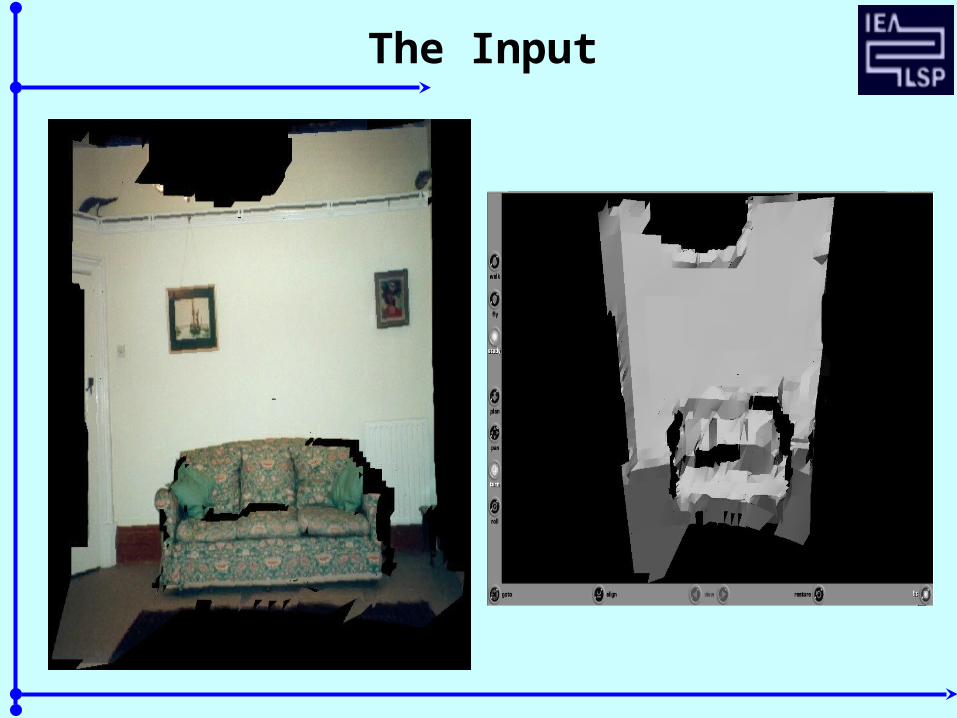
The Input
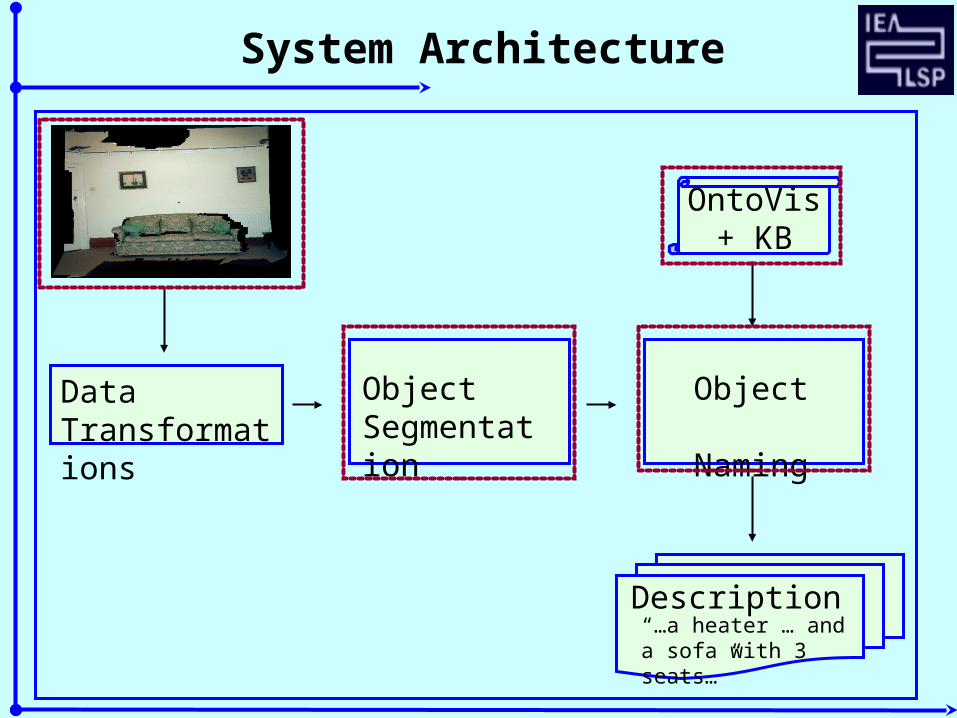
OntoVis+ KB
“…a heater … and a sofa with 3 seats…”
Description
Data Transformations
Object Segmentation
Object Naming
System Architecture
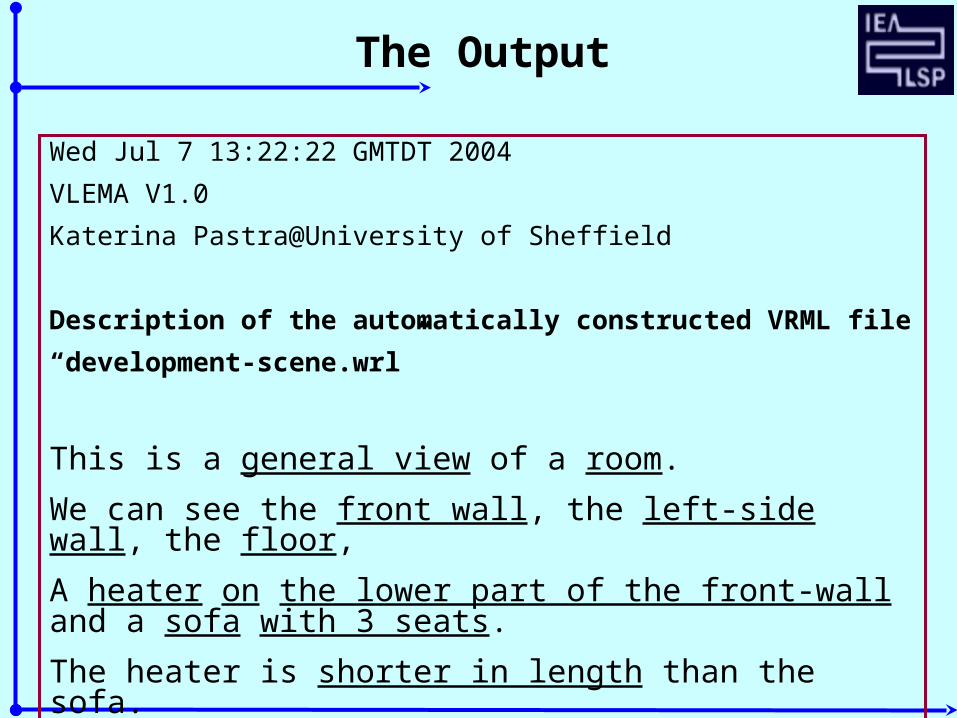
The Output
Wed Jul 7 13:22:22 GMTDT 2004
VLEMA V1.0
Katerina Pastra@University of Sheffield
Description of the automatically constructed VRML file
“development-scene.wrl”
This is a general view of a room.
We can see the front wall, the left-side wall, the floor,
A heater on the lower part of the front-wall and a sofa with 3 seats.
The heater is shorter in length than the sofa.
It is on the right of the sofa.
Extension of OntoVis and testing in VRML worlds Modular description of clusters/parts (not rely just on their number in each dimension) Exploration of portability of f-set to 2D images
Initial signs of feasibility: cf. research on detecting spatial relations in 2D, structure-identification in 2D, algorithms for 3D reconstruction from photographs)
Future Plans & Conclusions
To what extent scalable even in 3D?To what extent scalable even in 3D?
Complementary or alternative to Complementary or alternative to current approaches?current approaches?
OntoVisOntoVis
Indications of Indications of OntoVis scalability & OntoVis scalability & feasibility that worth feasibility that worth further explorationfurther exploration