Embed Size (px)
Citation preview

Image from: http://www.automotoportal.com/article/hummer-adds-to-american-red-cross-disaster-response-capability
Disaster Response

2
Outline Introduction
Team Facilities
Goals Background Current Work Conclusions
Introduction | Goals | Background | Current Work | Conclusions

3
Team Dr. M. Bernardine Dias (PI) Dr. Anthony Stentz (Co-PI) Ph.D. Student:
G. Ayorkor Mills-Tettey Staff
Imran Fanaswala Wael Ghazzawi Ameer Abdulsalam
Introduction | Goals | Background | Current Work | Conclusions

4
Support Team Dr. Brett Browning (Robotics Lab) Dr. Majd Sakr (Robotics Lab) Ph.D. Student:
E. Gil Jones
Staff Dr. Balajee Kannan Freddie Dias David Galati Bryan Nagy
Introduction | Goals | Background | Current Work | Conclusions

5
Webpage www.qatar.cmu.edu/disaster-response
Introduction | Goals | Background | Current Work | Conclusions
6
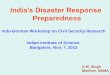
Facilities Faculty Robotics Lab (Doha) Undergraduate Robotics Lab (Doha) rCommerce Lab (Pittsburgh) Field Robotics Center Highbay (Pittsburgh) Robots:
ER1s (Doha and Pittsburgh) P3DX (Pittsburgh and soon
in Doha) Many more…
Introduction | Goals | Background | Current Work | Conclusions

7
Outline Introduction Goals
Overall project goals Efficient distributed team coordination Optimal coordination of small sub-teams Effective human-robot team coordination
Background Current Work Conclusions
Introduction | Goals | Background | Current Work | Conclusions

8
Project Goals Develop algorithms and
tools to enhance disaster response activities Specifically in coordination
Design, implement, and validate these tools
Comprehensively survey the needs and existing technology relevant to disaster response
Introduction | Goals | Background | Current Work | Conclusions
http://us.oneworld.net/files/images/16470.img_assist_custom.jpg
http://blog.wired.com/photos/uncategorized/2007/10/05/disaster.jpg

9
Key Research Areas
Introduction | Goals | Background | Current Work | Conclusions
Efficient Large-Team Coordination for Complex Tasks in Dynamic and
Uncertain SettingsOptimal Planning and
Re-Planning for SmallerSub-Teams Performing
Critical Tasks
Effective Coordinationof Human-Robot-Agent
Teams Operating inDynamic and Uncertain
Environments

10
Key Research Areas
Introduction | Goals | Background | Current Work | Conclusions
DistributedMarket-Based
Task Allocation:TraderBots Mathematical
Programming:Branch-and-Price
Capturing Situational Awareness:
AdjustableAutonomy

11
Key Research Areas
Introduction | Goals | Background | Current Work | Conclusions
TraderBotsBranch
AndPrice
AdjustableAutonomy

12
Outline Introduction Goals Background
Market-Based Allocation Mathematical Programming Adjustable Autonomy
Current Work Conclusions
Introduction | Goals | Background | Current Work | Conclusions

13
Market-Based Task Allocation Robots are organized as an
economy with virtual money Team mission is to maximize
production and minimize costs Robots exchange money for tasks
to maximize individual profit System is designed to align local
and global profit maximization Auctions enable task allocation
Introduction | Goals | Background | Current Work | Conclusions

14
Trader Interactions
OpTrader
Revenue paid
Information
Operator(GUI)
Robots(RoboTraders)
Operator(GUI)
Introduction | Goals | Background | Current Work | Conclusions

15
Mathematical Programming Team coordination problems can be
formulated mathematically as integer programming problems A well-known, but difficult class of problems
Introduction | Goals | Background | Current Work | Conclusions

16
Integer Programming Optimal solution approaches:
Branch-and-bound Branch-and-price Branch-and-cut … etc.
Introduction | Goals | Background | Current Work | Conclusions
P
P1 P2
a
b c
01 x 11 x
P3 P4
b c02 x 12 x

17
Mathematical Programming for Team Coordination
Complexity of integer programming restricts the size of problems that can be solved Best suited for small team coordination
Introduction | Goals | Background | Current Work | Conclusions

18
Adjustable Autonomy Robots can ask humans for help in difficult situations Robots in the disaster response arena usually rely on
more human control
Introduction | Goals | Background | Current Work | Conclusions
Sliding Autonomy

19
Outline Introduction Goals Background Current Work
Survey Efficient Distributed Coordination Optimal Centralized Coordination Evaluation Human-Robot Teaming
Conclusions
Introduction | Goals | Background | Current Work | Conclusions

20
Survey of Disaster Response Tech A survey of the needs and existing technology relevant to disaster response:
Disaster scenarios Disaster management Software systems and their applications Hardware systems and their applications
Introduction | Goals | Background | Current Work | Conclusions

21
TraderBots
BranchAnd
Price
AdjustableAutonomy
TraderBots
Introduction | Goals | Background | Current Work | Conclusions

22
Motivation Traditional approach – Ad hoc, protocol
based. We need an approach that is:
Efficient Distributed Robust Dynamic Scalable
Introduction | Goals | Background | Current Work | Conclusions
23
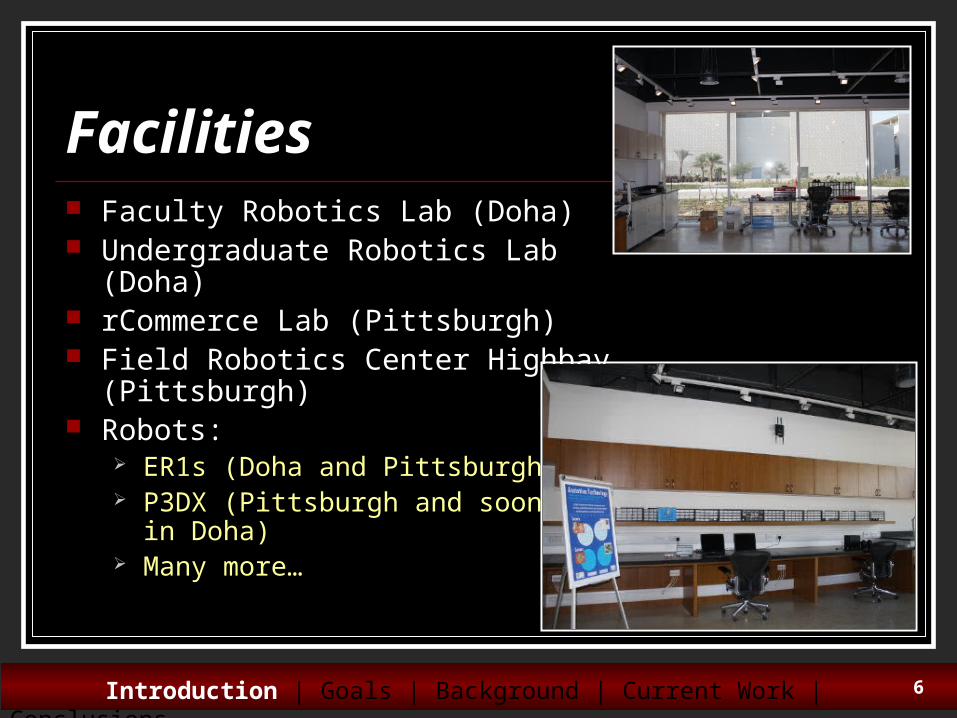
Operator
OpTrader
Robot 1
Robot 2
Robot 3

24
Operator
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4
OpTrader

25
Operator
OpTrader
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4
OpTraderAuction
Announce and clear auction

26
Operator
OpTrader
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4
OpTraderAuction
Announce and clear auction
Bids
Bids
Bids

27
Operator
OpTrader
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4
OpTrader

28Introduction | Goals | Background | Current Work | Conclusions
Centralized Allocation

29
Operator
OpTrader
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4
RoboTraderAuction
Announce and clear auction
OpTrader

30
Operator
OpTrader
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4
RoboTraderAuction
Announce and clear auction
Bids
Bids
OpTrader

31
Operator
OpTrader
Robot 1
Robot 2
Robot 3
Task 1 Task 2 Task 3
Task 4

32Introduction | Goals | Background | Current Work | Conclusions
Distributed Allocation

33Introduction | Goals | Background | Current Work | Conclusions
Comparison

34
Future Work and Challenges Deployment on robots
and hand-held devices Designing domain-
relevant cost functions Multi-threaded
asynchronous implementation
Improved visualization Integrated with simulator
Introduction | Goals | Background | Current Work | Conclusions

35
Branch-and-Price
TraderBots
AdjustableAutonomy
BranchAnd
Price
Introduction | Goals | Background | Current Work | Conclusions

36
Mathematical Programming Set-partitioning formulation
23
1 4
5 A
B
r0 r1
r2
r3
r4
Introduction | Goals | Background | Current Work | Conclusions
A specific type of integer programming formulation, useful when assigning multiple items (e.g. tasks) to each agent

37
Mathematical Programming:Set-Partitioning Example
r0 r1 r2 r3 r4
A: 1
B: 1
Each agent assigned to at most 1 route:
r0 r1 r2 r3 r4
1: = 1
2: = 1… … … … … …
Each task assigned to exactly 1 route:
Arx1
Arx2
Arx3
Brx0
Brx4
Brx0
Brx4
Arx1
Br
Br
Ar
Ar
Ar
Ar
Ar
Ar
Br
Br xcxcxcxcxc
4433221100
23
1 4
5 A
B
r0 r1
r2
r3
r4
Minimize: subject to constraints:
Introduction | Goals | Background | Current Work | Conclusions

38
Mathematical Programming: Branch-and-Bound Algorithm Steps to finding an optimal solution
Ignore some constraints to solve a simpler problem Solution may be invalid for original problem
“Branch” and insert a new constraint in each branch Repeat until best solution is valid for original problem
P
P1P2
20.67
22 21
),,,,0( 32
31
31
31x
),,,1,0( 31
31
31x)1,1,0,0,0(x
01A
rx 11A
rx
P3 P4
23 21.5)0,0,1,1,0(x),,0,1,0( 3
231x
00 Brx 1
0B
rx

39
Mathematical Programming: Branch-and-Price When feasible routes are too many to enumerate
Start off with a subset of known routes
Master Problem: Tries to assign known routes to agents
Sub problem:Generates additional useful routes to consider
P
P1 P2
P11 P12
r0 r1 r2.
5.45.24.7
r3.5.3 5.04.8 r4.4.9 r5.
Introduction | Goals | Background | Current Work | Conclusions
….

40
Mathematics Programming for Optimal Centralized Coordination
Novel set-partitioning formulation considering many real-world requirements: Multi-step tasks Time constraints Precedence constraints Simultaneity constraints
Location choice Proximity constraints Mutual-exclusion
constraints
Introduction | Goals | Background | Current Work | Conclusions

41
Optimal Centralized Coordination:Set-Partitioning Formulation
(Task rewards) – (travel cost) – (waiting/idle cost)
1 route per agent 1 route per task
Valid start time for taskValid arrival time for agent for task
Valid idle time for agent for task
Simultaneity constraints
Proximity constraints
Precedence constraints Mutual exclusion constraints
Location capacity constraints
Maximize:
Subject to:
Sid
e co
nstr
aint
sS
tand
ard
set-
part
ition
ing
form
ulat
ion
Introduction | Goals | Background | Current Work | Conclusions

42
Optimal Centralized Coordination: Implementation Status
First version of solution method: Branch-and-bound algorithm for coordination
problem with precedence constraints Example
Introduction | Goals | Background | Current Work | Conclusions

43
Optimal Centralized Coordination:Branch-and-Price Algorithm Created mathematical formulation of sub-problem
Constrained route-planning problem Next steps
Implement solution algorithm for sub-problem Integrate master & sub problem algorithms
Introduction | Goals | Background | Current Work | Conclusions
Master Problem
Sub problem

44
Adjustable Autonomy
TraderBotsBranch
AndPrice
AdjustableAutonomy
Introduction | Goals | Background | Current Work | Conclusions

45
Robots in Disaster Response
NISThttp://sciencelinks.jphttp://www.sintef.no
Anna KondaACM-R5 Robot Snake
Versatrax 100
Introduction | Goals | Background | Current Work | Conclusions

46
Remote Operations Evolution Robotics ER1 robot enhanced in sensing and robustness Highlights challenges faced by first responders when remotely operating robots Camera is the only source of information for the human controller Difficult to maintain accurate situational awareness due to:
Limited “tunnel” vision Lag during communication Inherent sensor noise
Introduction | Goals | Background | Current Work | Conclusions

47
Hand-held Tools - Motivation
Human first responders need to interface with the task allocation algorithms: To be assigned tasks To intervene in operations
Need portable interface device carried by first responders
Chosen option: A mobile-phone platform running Android OS, an operating system created by the Open Handset Alliance, a group of companies including Google
Introduction | Goals | Background | Current Work | Conclusions
htc.com

48
Hand-held Tools - System
Next Steps: Purchase two
Android Development Phones
Create a basic software tool to inform human of tasks allocation and allow intervention in operations
Introduction | Goals | Background | Current Work | Conclusions

49
Evaluation
TraderBotsBranch
AndPrice
AdjustableAutonomy
Introduction | Goals | Background | Current Work | Conclusions
50Introduction | Goals | Background | Current Work | Conclusions
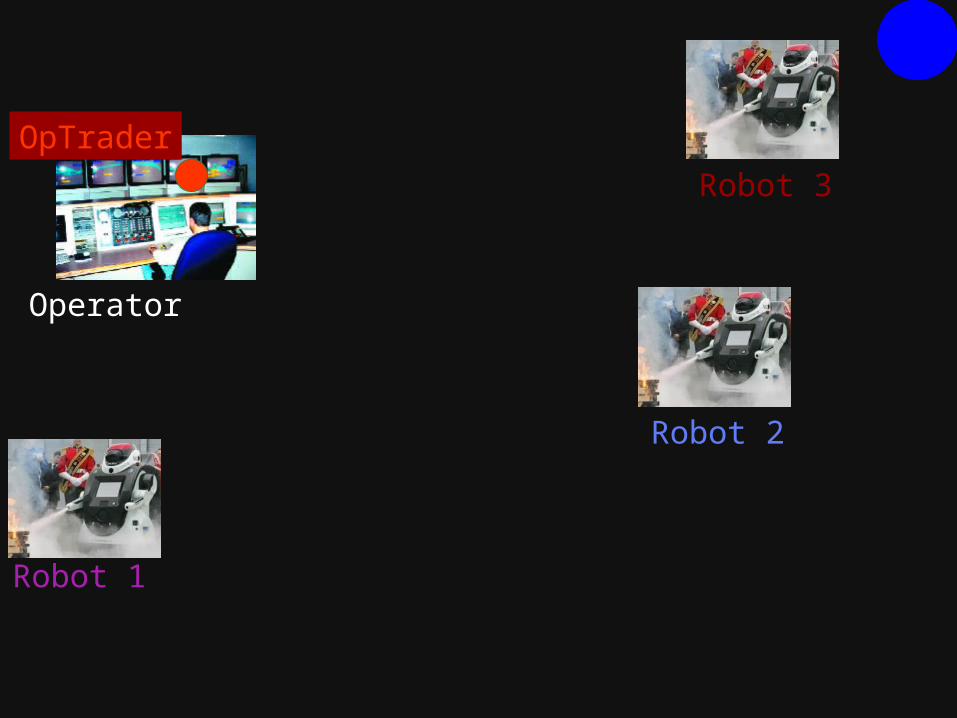
Simulation System
Visualization World Modeling Physics Engine Server & Client app
Sensor Modeling / Input output feeds Robot Modeling Basic Robot Control Application Interfacing
Artificial Intelligence Autonomous Control Path Planning Sensor Data Analysis & Modeling

51Introduction | Goals | Background | Current Work | Conclusions
Unreal Tournament 2004
Visualization World Modeling Physics Engine Server & Client app

52Introduction | Goals | Background | Current Work | Conclusions
USARSim
Sensor Modeling Robot Modeling Basic Robot Control Application Interfacing

53Introduction | Goals | Background | Current Work | Conclusions
MOAST
Motion ControlMotion Control
Reactive NavigationReactive Navigation
Path PlanningPath Planning
Interface to our AlgorithmInterface to our Algorithm

54Introduction | Goals | Background | Current Work | Conclusions
Virtual Human Robot Interaction
Provides a human-robot interaction training environment
Help fine-tune HRI interface to preview necessary information

55Introduction | Goals | Background | Current Work | Conclusions
Evaluation
Unreal Tournament 2004 Unreal Tournament 2004
USARSimUSARSim
MOAST++MOAST++
High Level AlgorithmHigh Level Algorithm
Modeling real world scenarios in realistic Virtual Environments
Simulating sensor errors Modeling specific robots Testing algorithms in different
deployment scenarios

56
New Robots
Introduction | Goals | Background | Current Work | Conclusions
Pioneer 3 AT: Outdoors Robot Proposed Sensors
Range Finder Camera Sonar Wireless Communication GPS
Pioneer 3 DX: Outdoors Robot Proposed Sensors
Range Finder Camera Sonar Wireless Communication

57
Outline Introduction Goals Background Current Work Conclusions
Introduction | Goals | Background | Current Work | Conclusions

58
Conclusions Our goal is to build
effective tools for team coordination in disaster response
We have built significant infrastructure and made good progress in our first year
We are now well-positioned to make good progress in all 3 key areas of research
Introduction | Goals | Background | Current Work | Conclusions