Embed Size (px)
Citation preview

1

If we look at the challenges or difficulties for describing non‐linear behavior of concrete, it is clear why it is up to date subject to research….
Plasticity theory was mainly developed for metal plasticity. From a micro‐mechanical point of view the processes in metal and concrete, that result in non‐linear, plastic behavior are rather complicated. While dislocation dynamics in polycrystalline structures drive metal plasticity, concrete plasticity originates from initiation and growth of millions of micro cracks at the interfacial transition zone (ITZ) between aggregate and mortar, as well as inside mortar. Today, microstructural studies still have mainly qualitative character. Due to a quite complicated microstructure of concrete, the approach of continuum mechanics, on other terms ignorance with respect to microstructure, seem to be a rather reasonable approach for making quantitative statements. Hence we need to free ourselves from a too strict interpretation of plasticity and low. Only then we can extend plasticity theory to the observed concrete behavior. Plasticity theory is a flexible, mathematical framework for describing a huge bandwidth of observed behavior including dilatancy and other phenomena like damage and so on.
First we will recall the most important features of non‐linear concrete behavior and failure. Then we will look at models for hardening, softening and finally damage plasticity for concrete.
2

Concrete is a particulate composite of large aggregate and a mortar matrix, that is a composite of sand and cement as well. The physical behavior is rather complicated and strongly depends on w/z ratios, aggregate size and shape distributions, cement type, temperature and much more. We consider concrete to be homogeneous and initially isotropic. In reality we have a vast number of micro‐cracks at aggregate boundaries due to autogenous shrinkage and very complicated stress states even before we put any load on the system.
We saw multiple times how concrete fails brittle under tension but has certain deformability under compression. Typically the tensile strength is 8‐12 times smaller than the compressive strength. A similar ratio holds for the ultimate strain that is about 0.25% under compression. From there on the instable part of the strain softening starts up to a stain of 0.35% (only for displacement controlled tests). The brittle behavior under tension does not mean, that everything behaves liner‐elastic, it is rather non‐linear elastic and dominated by the growth of one dominant crack perpendicular to the principal stress. Under compression however many cracks grow simultaneous along the principal stress direction. We remember the MOE of concrete is obtained under compression with cube samples via the secant modulus between a lower stress of 0.5MPa and un upper one of 1/3 of the cube compressive strength f_c.
Let’s have a look at the longitudinal and transversal behavior of a concrete sample under uniaxial compression. The shape of the stress‐strain diagram strongly depends on the mechanisms of internal crack growth:1. The axial compression‐strain curve has an almost linear behavior up to 1/3 f_c. From
3

there on the energy is sufficient to drive local cracks, what is the end for the elastic domain. From 30‐50%f_c cracks grow at the interfaces between aggregate and mortar and the aggregate detaches. Cracks through the mortar matrix however only become relevant in the regime from 50‐75%f_c where they join and form larger cracks. From there on we observe an increasing stiffness loss up to 80%f_c where the fabric disaggregation sets in along with strong stiffness loss up the fabric destruction and ultimate stress. The fabric disaggregation is easily recognizable when monitoring the volumetric strain, e.g. the turning point in the strain curve. Already at 75% f_ccracks can reach critical length resulting in instable crack growth. After the maximum stress progressive fabric destruction is observed until the ultimate strain of epsilon_uis reached.
2. A constant Poisons number corresponds to a straight line for the volumetric strain. This linear behavior is observed for lower stresses, however before reaching f_c, it decreases and finally dilation is observed that is typical for frictional cohesive materials. From a limit stress of about 80%f_c small cracks form parallel the principal stress that are responsible for the increase of Poisson’s ratio and finally for dilatation. (nu_concrete ~0.18, metal ~0.33). On the right side of the origin we have volume decrease, on the left increase. The stress that corresponds to the small value of volumetric strain is called «critical stress»
3. The tensile behavior is similar to the compressive one, only at much lower values with f_t=5‐10%f_c.
Now we want to unload the concrete sample. As observed for metals, also the unloading is along linear‐elastic paths. However the stiffness is smaller than in the undamaged sample, that contained less cracks. The MOD of the unloading path hence depends on the damage progress. The reloading is with identical MOE as the unloading and damages evolves again, once the «yield stress» is reached.
3

After strength was understood, researchers focused on different loading combinations.
4

From looking at the mechanical behavior under multiaxial stress states it is pretty evident, that strength is a function of the stress state and can not only be considered by the independent limits under pure tension, compression or shear. A correct prediction needs the interaction of different components of the stress state.
5

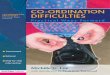
The shape of the failure envelope of concrete is commonly visualized in the principle stress space by looking at the intersections with the deviatoric and meridional planes. Those are the planes that contain the hydrostatic axis. But what do we call failure after all? Is it the yielding, crack initiation, the ultimate stress or deformation? We use here the definition that failure corresponds to the ultimate load, that a sample can transmit. We consider concrete to be initially isotropic, neglecting the anisotropy from production. Failure envelops of concrete do all look similar, but the underlying behavior is relatively complicated. Next to many other factors, the mechanical properties of aggregate, mortar, production and load induces damage and several others are quite different what results in a large variability of the failure envelopes. For us this means that drastic idealizations for the mathematical model and the strength characteristics of concrete are inevitable. Clearly there can not just be one model that describes it all. Even if there would be, it would be so complicated that it could not be used for practical purposes. Hence we need to use simpler models or criteria, that represent relevant characteristics well.
In the figure you see the failure envelopes of 3 concrete types of different strength classes. All have similar failure mechanisms for the different loading zones, what results in a data collapse when normalized with strength values. The compressive strength increases for biaxial stress sates up to 25% for sig1/sig2=0.5 and 16% for sig1/sig2=1. For biaxial compressive‐tensile stress, the compressive stress nearly decreases linearly with increasing tensile stress. Biaxial tensile‐tensile stress however is identical to uniaxial tensile strength.
6

One needs curved meridian intersections and non‐circular deviatoric intersections. There is a number of 4 and 5 parameter models that fulfill both conditions.
In the 4P Ottsen criterion the 4 parameters a,b,k1,k2 have to be obtained from fits to 4 different tests….. All stress invariants are normalized by cube compressive strength. The criterion is valid for all stress states, meridian intersections are parabolic (convex for a,b>0) and deviatoric ones are non‐circular ranging from nearly triangular to circular with increasing hydrostatic pressure. For certain sets of parameters other criteria are comprised like a=b=0 lambda=const. For von Mises or a=0 and lambda=const. For the Drucker‐Prager criterion.
7

Hsie‐Ting‐Chen proposed a simple variant for the lambda function of the Ottosencriterion: lambda=bcos(theta)+c. What results is a criterion that is a linear combination of the three most famous ones: Von Mises, Drucker Prager and Rankine. The 4‐P Hsie‐Ting‐Chen model uses next to invariants the maximum principal stress. The material constants a,b,c,d have to be obtained by fits to experimental data…. As demonstrated, along the compressive meridian an edge exists what needs special attention for implementations.
8

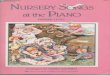
The 5P Willam and Warnke model has nonlinear meridians and elliptical intersection with the deviatoric plane. To describe the variation of the mean shear stress in tensile and compressive zones as function of the mean normal stress, W&W use a parabolic approach. The two curves have to intersection at the apex on the hydrostatic axis atsimga_m0/f_c=chi_0, what reduces the parameter number from 6 to 5. Hence 5 parameters have to be obtained from tests to construct the envelope by first making the meridians and then using an ellipsoidal approach fro the deviatoric intersections. The required tests are:
9

Now that we have all as and bs we can connect the meridians via the ellipsoidal surface – hence insert rho_t and rho_c. rho_t/rho_c=1 gives the Drucker‐Prager criterion. Rho_t/rho_c ½ gives almost triangular intersection curves of the Rankine criterion.
Ellipses are very useful, since they automatically fulfill the conditions on symmetry, convexity and differentiability. Additionally one can go towards a circle, what means that for rho_t=rho_c, we obtain the von Mises or Drucker‐Prager if we want.
If one compares the W&W criterion with test data, one can observe good agreement between experiments and reality. Considering the scatter in experiments, one can claim, that the model is practicably sufficient for concrete. It
• Is periodic in the deviatoric plane with threefold symmetry with ellipse sections,
• Has non‐circular shapes in the deviatoric plane with possibility from circular to nearly triangular non‐affine intersections
• Has parabolic meridians.• Has convex surfaces and intersections.
10

Here we see the comparison of the 3 models together with experimental data.
11

On the right we see a different model of Chen‐Chen with an initial yield surface and a failure surface. It is a rather popular model and many concrete plasticity models relate to it. In principle we have 3 different tasks, that are identical for all concrete plasticity models…..
12

The initial yield surface defines the elastic limit for mulitaxial stress states. For metals this is rather straightforward, but for concrete yield stress is a more artificial concept that only appears in mathematically constructed relations. An early first approach to this problem consisted in using the failure surface and shrinking it by a factor of 0.3f_c. This sounds plausible but comes along with several problems. First the plastic dilation under hydrostatic load is entirely ignored, since the yield surface extends with hydrostatic compression. Second the surfaces are not valid for all stress states. Imagine that the parameters were obtained under compressive stress. Under tension the world is however quite different, since we have different dissipation mechanisms and damage evolution. Such an approach however implies homogeneous plastic zones with similar behavior under all stress states. Hence an isotropic scaling approach must be wrong.
There are not so many works for the determination of initial yield surfaces. Launray and Gachon made one in 1970, and one can see, that the curve is closed and coincides in the tension‐tension zone almost with the failure surface. Hence the hardening zone almost vanishes here, while the compressive zone can have a quite large hardening zone for hydrostatic stress.
13

Hardening rules describe how the initial yield surfaces evolve due to plastic deformations. For loading without reversion, the surface opens and finally reaches the failure surface (image top right). The rules for the change of yield surfaces in the deviatoric plane are isotropic, since surfaces evolve without a change in shape. The meridian plane however is not isotropic and expands non‐uniformly with different shape. In general the subsequent surface or loading surface can be given in the form ….. With the scalar kappa hardening parameters that are function of the plastic deformation history.A simple model for non‐uniform plastic deformation was proposed by Han and Chen with a singular hardening parameter k0. The model for multiple plastic hardening by Ohtani and Chen uses 3 hardening parameters: the present values of yield stress in uniaxial compression, uniform biaxial compression and uniaxial tension . Those are functions of the respective effective plastic strains determined from experiments. This decoupling makes sense, since the different zone exhibit quite different failure mechanisms and hence physics.A different model was proposed by Vermeer and Deborst and is based on the Mohr‐Coulomb flow. Hardening parameters are consequently the internal friction angle and the cohesion, that can evolve independent from each other.
14

We saw how concrete under compression first contracts and then from 75%fc on becomes dilatant. This inelastic dilatation in the hardening regime is a clear violation of the associated flow rule. Hence one needs for concrete a plastic potential surface with different shape from the loading surface, in other words non‐associated flow rules. The plastic potential surface can be expressed by the function g(alpha) with the scalar parameter alpha_i being functions of the hardening parameter. If we look at the non‐uniform plastic hardening model by Han and Chen, we can see an approach with a plastic potential surface of Drucker‐Prager type that can produce with the flow rule an plastic strain increment along with volumetric dilatation. Alpha is hence a measure for plastic dilatation, that can be assumed to be a linear function of the hardening parameter k0 (initially k0=ky; k0=1 at failure). Other models use surfaces of Mohr‐Coulomb type with internal friction angle that is replaced by a so‐called dilation angle Psi. The dilatation angle is smaller than the internal friction angle and has to be determined in experiments.
15

In the following, we want to focus on two different hardening models: the nun‐uniform plastic hardening model by Han and Chen, and the multiple hardening plasticity model by Ohtani, Chen 1988. The first one is given here in the hydrostatic plane. The failure envelope encloses all loading surfaces and is taken as fixed. The shape of the deviatoric intersection of the loading surface are similar to the failure surface, its meridians however differ. The initial yield surface is closed. During hardening, the loading surface expands and morphs from the initial yield surface to the failure surface. Each loading surface is defined by a hardening parameter k0. Non‐associated flow is assumed. Then the incremental stress‐strain relation is used, following the classical plasticity theory. However first we look at the failure surface with the Ottosen, Hsieh‐Ting‐Chen, and Willam‐Warnke models, all given here in a general form f(rho, mean stress and Lode angle). Rho_f denotes the failure surface that depends on the mean stress and the Lode angle. When taking the OTTOSEN 4P model and (2J_2)^1/2=rho_f we can rearrange and obtain….. Lambda is identical to the previous considerations. A similar approach results in the failure surface of the HTC model with Xi being replaced by 3^1/2 sigam_m. Identically one can proceed with the failure surface of Willam‐Warnke.
16

The shape of meridian intersections of the initial and subsequent surfaces can be formed as given in the figure. One distinguishes 4 zones:…. To differentiate the zones one can use the triaxial zoning criterion with invariants. The intersection points with the uniaxial stress states are used to define the Xi parameters. However they can also be freely chosen, e.g. Xi_t=0, Xi_c=Xi_k=‐f_c/3.With the failure envelopes now the subsequent yield surfaces can be defined with the form factor k. K is a function of the mean stress and the hardening parameter k0, that is between the initial yield stress and 1 (= failure). Also the intersection point with the hydrostatic axis xi‐bar=A/(1‐k0) follows with the constant A. The hardening parameter is function of an effective stress tau and a plastic modulus H^p from uniaxial compression tests like the one on the last slide. This way each parameter k0 gets assigned a surface and a plastic modulus or plastic work. The experimentally determined (uniaxial) plastic modulus is called base plastic modulus to distinguish it from the plastic modulus from the constitutive equation. Since it was determined in uniaxial tests, it is not valid for high hydrostatic pressure. We will get to corrections for this later.
17

First we make the additive decomposition of the strain increment into elastic and plastic component. This is the inserted in the Hooks law with the isotropic stiffness tensor C_ijkl with elastic constants G and mü. Of course during plastic deformation the consistency condition df=0 holds, so we remain on the yield surface. For non‐uniform hardening the loading function f from the last slide is given and we form a total differential of the function . Tau denotes the effective stress and the derivative of the effective stress with respect to the effective plastic strain is the plastic modulus Hp. If we insert the strain increment we obtain…
The relation between plastic effective strain increment and dlambda can be expresses via a scalar function phi. Additionally using the flow rule we obtain the plastic increment dLambda… The properties theta and df/dtau will be determined later. By inserting everything into the flow rule we obtain the constitutive relation:…. If we now have the loading function f and the plastic potential function g, everything is given.
18

For associated flow g=f, the derivatives with the coefficients Bi and the derivatives of the loading function with respect to the stress invariants are… This we can now make for the 3 used failure envelopes. We insert the relation into the constitutive equation and obtain for h and H_ij… The plastic stiffness tensor is symmetric for this case.
For non‐associated flow for example the Drucker‐Prager function can be used for the plastic potential surface, resulting in h and Hij for the now non‐symmetric plastic stiffness tensor that is more complicated to solve.
19

Based on the loading functions we used an effective stress tau and effective strain depsilon_p for mulitaxial stress states, that are calibrated using uniaxial tests. This results in a simplified form of the loading function from where the effective stress tau could be defined. The corresponding effective plastic strain can be defined via the plastic deformation work. Here the plastic potential is used, so we can still distinguish between associated and non‐associated flow with the flow rule used one slide back.Finally we derive the relation for df/dtau. From the consistency condition it follows:… Since for uniaxial compression the only non‐zero stress component is sigma_33 and using the definition of the effective stress one obtains dtau=‐dsigma_33. Hence we have rho and sigma_m and can write:…..
20

The model covers several aspects of plastic concrete behavior such as brittle failure under tension, ductile failure under compression, sensitivity with respect to hydrostatic stress and inelastic dilatation. Consequently one requires some material constants…. N and alpha are not sensitive with respect to different concrete mixtures, what significantly reduces the number of required parameters.
In the figures, the predictions are confronted with the biaxial test data by Kupfer, the triaxial data by Schickert and Winkler and cyclic loading data. In principle one observed satisfying agreement.
21

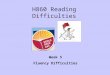
Multiple hardening models were first proposed by Murray in 1979 in a 2D version. The independent hardening model in the figure on the right defines three independent yield stresses, one in uniaxial compression, and 2 in uniaxial tension in 2 orthogonal directions. The stresses are used as hardening parameters that are independent from each other. The yield surface can thus develop independent from each other in the different zones. Later, the concept of multiple hardening was extended by Ohtani and Chen to three‐dimensional stress states…
22

A general form of the yield and hardening surface with N hardening parameters has the form:…with the stress tensor sigma_ij and the hardening parameters mü_M of the m‐thhardening mode, being a function of the m‐th damage parameter xi_m. The damage parameter can be related to the plastic strain or other factors. If the hardening modes are independent from each other, one of course has also independent hardening rules. The damage parameter should be a monotonically increasing function and his rate can influence the actual stress state. One can call the total damage of the material by Xi_t, the for the m‐th parameter one can write…. The parameter alpha_m describes the influence of the actual total damage increment of the material dxi_t on the damage increment of the m‐th hardening parameter. Hence alpha is =1, if the loading fully corresponds to the damage mechanism. This is shown in the figure.
The evolution law for the yield surface has to be defined such that convexity of the subsequent surfaces is assured. With the effective plastic strain, the damage increment can be written:…. The derivative of the loading function results in the consistency condition. With the effective plastic strain in the flow rule one obtains with Hooks law df=…. By rearrangements we obtain the magnitude of the plastic strain increment dlambda.
23

The plasticity model by Ohtani and Chen makes use of 3 hardening parameters:….Before hardening sets in one uses the loading functions f… Failure occurs when strength values are reached. The hardening makes use of the parameters:… depending on the load zone different subsequent surfaces are chosen.
24

The hardening parameters are also a function of the damage parameter of the type:… with the effective plastic strain corresponding to a simple mode of uniaxial compression, biaxial uniform compression and tension. These are expressed by the coefficients alpha_i, that express the portion on the total plastic strain depsilon_p with their specific hardening mode sigma_c(epsilon_pc)…. The alphas are hence depending on the load path. They have to follow the conditions: ….
With these conditions, the distributions of alphas in the figure was proposed. As one can see in the compressive zone two hardening mechanisms are simultaneously activated.
25

Based on the general constitutive equation with associated flow, we obtain by inserting the loading function the relation,….H_cp are the plastic hardening modules in the isolated modes and Qi the derivatives of the loading function with respect to the hardening parameter and the reason why one has to distinguish cases in the loading zones.
26

From 3 experiments (upper row) one determines 6 material parameters and the hardening modulus of the isolated modes. The agreement between prediction and experiment is satisfying. To summarize the model…
27

Strain softening of concrete was as focus of research in the 90s with many discoveries made on uniaxial compressive and tensile specimen. In principle for material test the following conditions must be met:…..The observed strain softening in stone and concrete however violates at least always one of these conditions. We observe, that the strain softening behavior depends on the sample size. It is thus not a material behavior but a structural one that results in size effects. If we do not plot the strain but the displacement, we realize, that the size of the strain localization zone is independent from the sample geometry. The localization appears in shear bands. Tension and compression are very similar with respect to those. To consider the strain softening behavior, localization zones can be included in continuum formulations like in the crack band model or fictitious crack models. In plasticity theory however this zone is smeared over the entire system.
28

Similar to the approach for hardening behavior the softening behavior is generalized from 1D to multiaxial stress and strain states.
29

Up to now stress was an independent variable in our stress‐strain relations. The total strain was composed of elastic and plastic strain. Alternatively one can make the strain to be an independent variable. However to obtain the stress state, on has to calculate the elastic part first, hence the elastic answer on the strain increment depsilon_ij and subtract that portion that was relaxed by plastic effects. The elastic stress portion can then be calculated via Hooks law. The relations are visualized for the uniaxial case in the figure on the top.
In strain space the role of loading functions is not much different. Inside of a surface everything is elastic, on the surface the direction counts with inward‐elastic, tangential‐neutral and outward‐plastic deformation. The surface can of course be displaced and deformed. A reason to remember next to the stress state the plastic strain state and the history parameter k, that depends on the plastic strain energy or the accumulated plastic strain. One also calls the surface relaxation surface, since only strain states on the surface can result in plastic stress relaxation.
30

For 3D loading it is important to assign a direction to the stress relaxation increment dsigma_ij^p. Hence a criterion for weak stability is needed, that was proposed by Il’yushin. We deform in the closed deformation circle A‐B‐C. For 3D loading the loading cycle corresponds to a strain path, where the strain moves outside of the relaxation surface, progresses incrementally and the returns to the original state. Il’yushinspostulate says, that the work by external forces in closed deformation cycles of an elastic‐plastic material is non‐negative. For plastic deformation it is positive. This corresponds to the hashed surface in the figure. What follows is the normality condition with the scalar dlambda>0. With the loading function F one obtains the relation for the plastic relaxation increment.
31

We can directly give the incremental form… However we wanted the compliance tensor. We multiply with the partial derivative of the relaxation function with the strain and solve with the flow rule for dlambda. Now we did everything to describe the constitutive relation with the flow rule. The expression in brackets is the compliance tensor. The relation works for hardening AND softening, however not for perfect plasticity. What is still missing is the scalar parameter h or dlambda.
32

With the consistency condition the parameter h or dlambda can be obtained. The derivative of the relaxation surface gives.. With the flow rule one obtains….. H depends on the evolution law of the flow surface in strain space. As soon as F is given, we can calculate both parameters. As we saw before, the derivation of the stress‐strain relation in strain space is similar to the one in stress space.
33

….. One has difficulties with this approach when it comes to the loading function, since two different loading surfaces are used. One is the yield surface in stress space, the other one the failure surface in strain space. To surpass this problem a plasticity approach in strain space is made, just like we saw. This way a consistent constitutive relation for elastic‐plastic material with stiffness degradation with work hardening and strain hardening is obtained.
34

The stress increment has now 3 components. Depsilon^p is the relaxation stress increment by plasticity, depsilon^f the relaxation stress increment by stiffness reduction. The same can be stated for strain increments that also have 3 components.The shape of the relaxation surface is similar to what we saw, only k is replaced by W’pf, the plastic‐failure work, that describes the total energy dissipation when un‐ and reloading. The relevant stress increment is the sum of the plastic and damage stress increment.
35

The energy dissipation rate has two components: plastic deformation and stiffness reduction (hashed region in picture last slide). The stiffness tensor can be assumed to be a function of the plastic work, what results in stiffness reduction rate. What follows is the stiffness degradation dC ….. After some tensor manipulations we obtain the relation between damage stress increment and total inelastic stress increment dsigma^f, as well as the plastic one. T is called transformation tensor. Now the decomposition to both dissipation mechanisms is complete.
From the consistency condition h and dlambda can be obtained and we get to the constitutive equation for the plastic failing body, that works for a large loading range of the plastic failing body with hardening or softening for materials with elasto‐plastic coupling. Plasticity coupled with elastic degradation is particularly observed in the post‐failure regime of concrete. The combination of plasticity theory with damage theory is a logical step that was possible only in strain space. We need a relaxation function F in strain space and a stiffness reduction rate tensor, that is function of the energy dissipation. Unfortunately the experimental verification of the softening behavior is not so simple and also the 21 components of C’ are not so easy to obtain. Since stiffness reduction in general is caused by damage development, one can use continuum damage mechanics to surpass this problem. We talk about this approach in the following.
36

37

Before we dig into CDM we want to recall stereotypical macroscopic behavior. On the left we see a typical elastic‐plastic behavior were irreversible plastic strain can be observed upon unloading. The unloading‐reloading path is straight and identical to the initial stiffness. In other terms, the stiffness does not change due to plastic deformation, hence the material non‐linearity is only caused by plastic strains. As we saw previously, this behavior can be well described in the framework of plasticity theory.
An other extreme is a material, that behaves ideal elastic in the sense, that upon unloading the material directly takes its initial stress and strain free configuration without any sign of remaining deformation. The material non‐linearity is caused be continuous stiffness degradation. This behavior can be caused by micro damage and fracture accumulations in brittle material and damage mechanics is the appropriate theory.
The combination of both stereotypes is however more often to be found in building materials. Damage plasticity is a popular term for this behavior. CDM is a theory that was developed in 1958 by Kachanov to describe such behavior. The initial versions focused on creeping metals, however it was extended in the 70s to all kinds of isotropic and anisotropic damage processes.
38

In general material building materials are full of defects and inhomogeneity even in the unloaded initial state, that have a decisive influence on the macroscopic strength of respective components. Examples for such microscopic material distortion are in metals voids, micro‐cracks, inclusions, precipitations and more. The number, size and distribution of such micro defects in a so‐called matrix material that is the load bearing material, is of significance for the micro mechanical damage processes. The respective void volume can be seen as a measure for the state of damage inside the material. If the external load is increased, existing micro‐voids and cracks can grow and merge and new micro voids can form. The total loss of load carrying capability is at the end of the process of micro‐structure degradation – also called macroscopic fracture.
39

CDM models are capable of describing such processes via phenomenological or micro‐mechanically motivated damage laws. Famous versions are the Gurson Model or the Rousselier Model, that are based on spherical micro‐voids embedded in a matrix material. The damage state of a material point is expressed by state variables. Those contain the influence of damage on stiffness or lifetime. State variables can be physically measurable, like porosity or crack density or be inverse expressible via their effect on macroscopic properties like stiffness or heat transfer coefficient, just to give an example. For plasticity the hardening function can be used, that is enriched by additional parameters with experimental correspondence to initiation and evolution or that originate from micro‐mechanical damage formulations.
This approach is so general that it could be extended to all kinds of different damage phenomena like ductile damage, fatigue, creep…. The evolution of internals state variables is often described by a micro‐mechanical approach. Hence it is important to distinguish between scales and structures, cracks, RVE, macro and micro cracks and pores.
In CDM a crack is nothing else but a plane zone with high stiffness gradient, where the critical condition of the state variable is reached. The crack development is hence the development of a damaged zone that progresses through the material due to load redistribution. First we focus on simple isotropic, uniaxial, scalar damage.
40

Damage variables can be continuum mechanical properties, like the ones we know form plasticity theory or they can have phenomenological character….
Image: damaged element with surface S (total surface) and S_theta (surface of micro cracks and pore intersection with the normal vector n). With a correction for the micro‐stress concentrations one obtains a continuous variable for the continuum calculation. This version was proposed by Kachanov (A_bar is the effective cross section). For isotropic damage theta is a state variable, for anisotropic damage it is a damage vector or tensor. Theta=0 is undamaged, theta_c=0.2‐0.8 is initiation and theta=1 is fully damaged.
41

We make the isotropy hypothesis assuming that isotropic damage emerges from cracks and pores that are uniformly distributed in space and orientation. With the principle of strain equivalence we assume, that the deformation behavior of the material is only influenced by damage in form of effective stresses. Every deformation behavior, no matter if uni‐ or mulitaxial of the damaged materials is described by the constitutive law of the undamaged materials, only that the stresses are replaced by effective stresses. It is clear, that theta=1 cannot be reached, hence that failure occurs before. Alternatively one can use the hypothesis of elastic energy equivalence, assuming that the deformation energy of the damaged material is equivalent to the undamaged one – only with the effective stress.
The damage tensor, (variable) can be decomposed into portions for cracks and pores. In principle the coupling of the mechanisms has to be considered. The intermediate configuration are undamaged configuration with respect to cracks/pores. Index c for crack, v for void. By making the derivation with an intermediate step one can show, that the damage variable theta can be expressed by 2 different components that can evolve differently. However note that it is not the sum!
42

In general, the CDM is based on the thermo dynamics of irreversible processes. An important property is the free energy potential Psi. We first look at the case of an ideal brittle body that is isothermal statically loaded. The free energy potential is a scalar function of the strain tensor epsilon_ij and the damage variable D. With the stiffness tensor of the undamaged material and the strain state, the potential function takes the form ….. When D=0, Psi expresses the strain energy density of the undamaged material. D however does not have to be scalar, it can also be a vector or tensor, e.g. for anisotropic damage.
For a purely mechanical, isothermal process, the entropy production can be given with eta. For all admissible processes, the entropy increment has always to be non‐negative, what is a different way of expressing the second law of thermodynamics in continuum mechanics. The inequality is in particularly useful to check, if a constitutive relation for material is thermodynamically valid. The inequality expresses the irreversible character of the processes, if energy is dissipated. It is named after the German physicist Rudolf Clausius and his French colleague Pierre Duhem. We now take Psi, its temporal derivative Pis_dot and insert. To fulfill the condition…… The first condition lead to the stress‐strain relation, while the second one described the energy dissipation rate in a damage process. Here one can also introduce the thermodynamic force Y or damage force that is associated with the damage variable D. D_dot is the thermodynamic or dissipative flux. The Clausius‐Duhem inequality can hence always be written as scalar product of a vector of the thermodynamic force and of the vectors of the dissipative flux.
43

As soon as we have a relation for the free energy, the total stress‐strain relation can be written. In incremental form this is:…. Next we have to make the relation between the strain increment depsilon and the damage increment dD – hence the damage evolution law.
43

Damage evolution laws are at the core of the CDM. In principle each component of the damage variable is a function of the present state of all state variables and internal variables. For a scalar damage variable the evolution law can be directly extracted from uniaxial compressive or tensile tests. If D is a vector or tensor, one needs an individual evolution law for each component for loading and unloading. This can quickly become quite complicated and hard to relate to experiments.
We derived in plasticity theory the kinematic conditions of the components of the plastic strain increment from the present value of the state variables. This we called potential surfaces. One can extend the principle to general brittle material failure. A specific potential surface (function ) can be defined and the kinematic relation of the component of the damage rate vector can be expresses via the normality condition . If we compare the Clausius‐Duhem inequality with the Drucker stability postulate, we see strong similarity. One can hence formulate similar to plasticity theory a dissipation potential or a surface of constant dissipation…..
One takes for the formulation of the state variables epsilon_ij and D. The surface is also called damage surface, hence the surface that comprised all loading paths, that do not result in additional damage. The damage rate vector is expressed via the flow rule with the non‐negative scalar mü. This formalism we already know from plasticity theory. One can see, that the definition of the damage evolution law or of the dissipative potential function is the most important step in setting up a constitutive relation of the damaged material, since it directly links to the micro‐structural changes inside the material.
44

Up to now everything was strain based. However the same can be made on stress based formulations. For this the complementary free energy Phi is required: …D is the damage variable, D_ijkl the initial compliance tensor and sigma the stress tensor. If D=0, we have the complementary energy density. One can again write the Clausius‐Duhem inequality with the change of the complementary energy density and obtains by inserting the stress‐strain relation as before the incremental stress‐strain relation….. The last step consists in formulating a damage evolution law for dD and D_dot.
45

First, we are looking for isotropic damage, hence a formulation with only one damage parameter for now. The free energy is as described before….. With the scalar damage variable D that is 0 if undamaged and 1 if damaged. The strain tensor is an observable property and D is the internal variable, associated to the stress tensor and the thermodynamic force Y. One writes….:
The 2nd law of thermodynamics via the Clausius‐Duhem inequality says…. (‐Y) is a positive definite quadratic function of strain. Hence D_dot hast to be non‐negative. The most important step is now the relation between damage rate and strain rate the damage criterion.
For concrete damage is often associated with tensile damage. For this reason one can define an equivalent strain measure for local strain with the principal strain epsilon_i. The damage criterion is then simply….. with the limit K(D), that corresponds to the largest equivalent strain that has to be taken by a material point. K(0)=K_0 is the initial state. What remains is the damage rate:…. F(epsilon~) is a continuous positive function of epsilon~. The value of D at the maximum equivalent strain is calculated by integration …..
46

47

Since concrete behaves entirely different under compression and tension (tensile cracks perpendicular to principal stress, compressive cracks to lateral contraction directed in principal stress orientations), the damage parameter is partitioned into a tensile and a compressive part: The weighting of damage parameters is done via alphas, whose relation is purely empirical (as proposed by Mazars). The stress tensor and strain tensor can be decomposed as well. What is missing now to complete the constitutive relation, is the definition of the damage evolution function F~c,t for the damage parameter.
48

The evolution law is also purely empirical and requires 5 material parameters that have to be taken from experiments… The initial limit surface or damage surface is plotted with predicted stress‐strain curve from the model. As one can see the model can describe hardening and softening curves of concrete under compression and tension. The initial surface looks quite good in the tension‐tension and Tension‐Compression zone, however the biaxial compressive zone does not look too realistic‐ in other words it is rather conservative in this zone.
49

Of enormous importance for the approach is the fact, that it is formulated for uniformly distributed cracks or defects, since the method of course is not for singular big cracks, that are much better described in the framework of fracture mechanics.
50

One can not only use different cases for the damage variables as we just saw, but one can also use two distinct damage variable, one for compression and one for tension that are formulated independent from each other. The partitioning of the stress tensor results in the relation of complementary free energy Phi…. D_ijkl is again the initial compliance tensor. For a given damage state, the stress‐strain relation of the material…. The thermo dynamic forces are… As one can see, those are non‐negative quadratic functions of the stress. To fulfill the Clausius‐Duhem inequality, D_dot has to be non‐negative.
51

Instead of using an equivalent strain, also the thermo dynamic forces Yc and Yt can be used. The criterion is…. The initial values for compression and tension can be obtained from uniaxial tests. Sigma^0_t,c are strengths in tension and compression. From the damage criterion the loading function can be determined…. F_t and F_c are continuous, positive functions of the thermo dynamic forces, that can be obtained from the damage evolution law. The proposed law is again purely empirical with the material constants a_t,c and b_t,c.
52

Let‘s see how the model describes concrete behavior. On the top the initial damage and failure cures in the sigam_3 plane are show. As we can see the agreement is not so bad and much better than the scalar damage model in the biaxial compressive zone. The figure below shows the case of a uniaxial and biaxial loading with reversed load. The model gives an acceptable description of the hardening‐softening behavior.
53

54

55