Embed Size (px)
Citation preview

IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018 17
Robust Sensors-Fault-Tolerance With SlidingMode Estimation and Control for PMSM Drives
Suneel Kumar Kommuri , Member, IEEE, Sang Bin Lee , Fellow, IEEE,and Kalyana Chakravarthy Veluvolu , Senior Member, IEEE
Abstract—In general, permanent magnet synchronousmotor (PMSM) drives require four sensors (one position,one dc-link voltage, and at least two current sensors) to ob-tain good dynamic control performance. If an unpredictablefault occurs in any of these sensors, the performance ofthe drive deteriorates or even becomes unstable. Most ofthe existing works are limited to fault diagnosis of oneor two sensors due to complexity. Therefore, to provide acontinuous drive operation regardless of any of the sensorfaults, an advanced fault-tolerant control (FTC) scheme thatcomprises of higher order sliding mode (HOSM) based ob-servers and controllers is proposed. Two HOSM observersand one Luenberger observer are designed to generate therespective residuals and provide the detection of all sensorfaults. Moreover, HOSM controllers are developed to ensurefinite-time convergence of the error trajectories after thefault reconfiguration. The proposed FTC scheme reducesthe existing chattering phenomenon with good performancein terms of convergence speed and steady-state error. Eval-uation results on a three-phase PMSM are presented to val-idate the effectiveness of the proposed FTC approach.
Index Terms—Fault-tolerant control (FTC), observer-based fault detection, reliable control, residual-generation,sliding mode (SM) control.
NOMENCLATURE
R,L Stator resistance and inductance.KE Electromotive force (EMF) constant.θs, ωs Rotor position and speed.P Number of pole pairs.φm , Tl Rotor flux and load torque.Fv , J Viscous friction and moment of inertia.ia , ib , ic Phase currents.
Manuscript received June 17, 2017; revised September 20, 2017; ac-cepted November 12, 2017. Date of publication December 15, 2017;date of current version February 14, 2018. Recommended by TechnicalEditor M. Basin. This work was supported in part by the Brain Korea21 Plus Project in 2017, and in part by the National Research Founda-tion of Korea (NRF) grant funded by the Korea Government (Ministry ofScience, ICT, and Future Planning) under Grant 2017R1A2B2006032.(Corresponding author: Sang Bin Lee.)
S. K. Kommuri and S. B. Lee are with the School of ElectricalEngineering, Korea University, Seoul 136-713, South Korea (e-mail:[email protected]; [email protected]).
K. C. Veluvolu is with the School of Electronics Engineering,Kyungpook National University, Daegu 702-701, South Korea (e-mail:[email protected]).
Color versions of one or more of the figures in this paper are availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMECH.2017.2783888
va , vb , vc Phase voltages.iα , iβ Currents in stationary reference frame.vα , vβ Voltages in stationary reference frame.eα , eβ Back-EMFs in stationary reference frame.
I. INTRODUCTION
P ERMANENT magnet synchronous motors (PMSMs) arewidely used in high-performance motion control applica-
tions because of their high efficiency and high power density[1], [2]. High-performance vector-control PMSM drive requiresone position, one dc-link, and at least two current sensors. Un-expected failure/malfunction in any of these sensors will de-grade the overall system performance or make the system unsta-ble. Therefore, it is extremely important for the vector-controlPMSM to be robust against sensor faults to provide uninter-rupted system operation. In recent years, fault diagnosis (FD)and fault-tolerant control (FTC) have been extensively studied[3]–[5] for accommodating the faulty plant dynamics. Variousapproaches have been proposed for the development of FTC indynamic systems. Most of the existing works on PMSM [6], [7]considered FTC of only one particular sensor assuming the othersensors are healthy. However, it is impractical to consider onlyone particular sensor fault in a real vector-control PMSM basedapplications (for instance electric vehicles and other industrialsystems). Indeed, fault can occur in any of the four sensors dueto their maloperations under challenging drive operating con-ditions. Hence, the PMSM drive needs to be prepared to takecare of such contingencies, therefore, FTC for all three kindsof sensors is an extremely important investigation in PMSMdrive applications. Most of the earlier approaches are focusedon observer-based FD [8]–[10] techniques, however, they areineffective to handle the model uncertainties, parameter vari-ations, and steady-state accuracy, which results unreliable FDdue to missing or false alarms. In [11], phase current and speedsensors FTC is proposed, in which, the phase current is recon-structed using the dc-link current and switching states. However,the usage of dc-link current measurement is redundant if faultoccurs in the other sensors. Furthermore, the works in [6], [12]considered only one sensor fault either in dc-link voltage orspeed using respective observers to achieve FD.
FTC for all three kinds of sensors requires estimation of allthe three sensors information to provide as feedback if the faultin a respective sensor is detected. Moreover, the respective esti-mated sensor variable should be robust to the motor parameter
1083-4435 © 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications standards/publications/rights/index.html for more information.

18 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018
variations and unmodeled dynamics, to be controlled by theconsidered controllers. Furthermore, the reconfiguration timeof a respective sensor fault should be as small as possible toavoid the chances of other observers become erroneous, whichmay result the closed-loop system unstable. Existing schemesfor sensors FTC are either too complex or ineffective in dealingall the sensors faults [13]–[15]. For instance, in [13], a bank ofobservers for sensor fault detection and isolation (FDI) is pre-sented for doubly fed induction generators. Five observers areused to provide the corresponding residuals for fault detection,however, the implementation is adverse and the robustness ofthe scheme in the presence of disturbances is not verified. Anadaptive observer for induction motor is proposed in [14], inwhich phase currents and rotor resistance are estimated and sentto a decision-making unit (DMU). However, the isolation ofvoltage sensor fault depends on the dynamics of phase currentsand also this method is only limited to sensor FDI. Recently,in [15], phase currents and rotor speed of the interior perma-nent magnet machine are simultaneously estimated using anextended Kalman filter. A residual-based FDI algorithm is usedto detect and isolate all the sensor faults. The main drawbackof this work is there is no scope for dc-link voltage sensor faultreconfiguration as it cannot be estimated using the scheme.
Sliding mode (SM) theory is well known for its robustnessto parameter variations and rejection of disturbances [16], [17].In [18]–[20], an effective estimation and control of industrialdrives are performed using first-order SMs, however, they re-quire additional low-pass filter to minimize the chattering phe-nomenon. To overcome the chattering issues and provide finite-time convergence, higher order SM (HOSM) observers basedon super-twisting algorithm (STA) (see [21] and [22]) havebeen developed by modifying the traditional SM design. Thequadratic like Lyapunov functions designed in [23] make it pos-sible to obtain an explicit relation for the controller parameters.Furthermore, modifications to STA have also been proposed toimprove the convergence and robustness properties [24], [25].The advancement in HOSM design has been applied to solvevarious industrial problems [7], [26].
Most of the existing FTC schemes [6], [8], [11], [15] focusedto handle one or two sensors faults by employing proportional-integral (PI) controllers in the control-loops. Moreover, the em-ployed techniques are suitable for exact mathematical modelsof practical systems and work well under noisy measurements.Nevertheless, there always exist parameter deviations and modeluncertainties that cannot be modeled with mathematical expres-sions. Hence, with the use of existing observers-based tech-niques [8], [13], [15], the generated residuals may deviate fromzero even without faults, which results unreliable detection.Motivated by the aforementioned observations, this paper pro-poses a novel residual-based reconfiguration (FTC) scheme todeal with all sensors (voltages, speed, and currents) faults. Inaddition, the proposed FTC scheme with HOSM observers andcontrollers provides high precision, finite-time convergence (ad-vantageous for active FTC systems to achieve acceptable decou-pling when faults occur during initial stages of the drive start-up)and robustness with respect to model uncertainties and param-eter variations even in the presence of noisy measurements. It
can be highlighted that the proposed scheme is more reliablesince three independent observers are designed by consideringeach sensor as an unknown input.
II. MODELING OF A PMSM AND PROBLEM STATEMENT
The PMSM model equations in the stationary reference framecan be expressed as [27]
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
diα
dt = −RL iα − 1
L eα + 1L vα
diβ
dt = −RL iβ − 1
L eβ + 1L vβ
dωs
dt = PJ φm (− sin θsiα + cos θsiβ ) − Fv
J ωs − Tl
J
dθs
dt = ωs
(1)
{eα= −KE ωs sin θs
eβ= KE ωs cos θs
. (2)
On the other hand, the relationship between the phase and αβ−axes for stator currents and voltages is given by
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
⎛
⎜⎜⎝
ia
ib
ic
⎞
⎟⎟⎠=
⎛
⎜⎜⎝
1 0
− 12
√3
2
− 12 −
√3
2
⎞
⎟⎟⎠
(iα
iβ
)
⎛
⎜⎜⎝
va
vb
vc
⎞
⎟⎟⎠=
⎛
⎜⎜⎝
1 0
− 12
√3
2
− 12 −
√3
2
⎞
⎟⎟⎠
(vα
vβ
). (3)
The first objective is to design observers for estimating thedc-link voltage, speed, and phase currents. In this paper, three in-dependent observers [two HOSM and one Luenberger observer(LO)] are designed for estimating them and then fault detec-tion is carried out based on the generated residuals. One of theHOSM observers is designed to estimate voltages from currentsand speed measurements. The other HOSM observer is used toestimate the speed from current and voltage measurements. Inthe same way, the LO is designed to estimate the phase currentsfrom voltage and speed measurements. For instance, if a faultoccurs in any one of the sensors, the corresponding estimatedsensor variable is compared with the faulty sensor variable todetect the fault using the preset threshold. If the fault is detected,the faulty sensor will be replaced with the corresponding esti-mated variable. The second objective is to design robust HOSMcontrollers to achieve exact tracking control performance by en-suring finite-time convergence of the tracking error trajectories.
III. OBSERVERS DESIGN
A. Estimation of Voltages Based on HOSM Observer
In this section, stator currents (iα , iβ ) and speed (ωs) are con-sidered as known quantities and voltages (vα , vβ ) are treated asunknown quantities. By using the HOSM observer, the unknownstationary reference frame voltages are estimated in both α- andβ-axes, respectively. The HOSM observer based on modified

KOMMURI et al.: ROBUST SENSORS-FAULT-TOLERANCE WITH SLIDING MODE ESTIMATION AND CONTROL FOR PMSM DRIVES 19
STA for the model in (1) is designed as⎧⎨
⎩
diα 1dt = −R
L iα1 − 1L eα + 1
L f1(t)diβ 1
dt = −RL iβ1 − 1
L eβ + 1L f2(t)
(4)
where the corrective terms proposed in the classical STA[23] are{
f1(t) = −Qv1|σα | 12 ˜sign(σα ) − Qv2
∫ t
0 sign(σα (τ))dτ
f2(t) = −Qv1|σβ | 12 ˜sign(σβ ) − Qv2
∫ t
0 sign(σβ (τ))dτ
in which σαβ = iαβ − iαβ is the selected sliding surface andQvi are the positive gains. Since the signum function in thecorrection term is bounded, the trajectories of the algorithmare very slow when they are far from the origin. Therefore, inorder to improve the convergence time, a slight modification byadding linear terms is introduced. Hence, enhanced design ofthe robust terms based on modified STA [7] becomes
{f1(t) = −Qv1ζ1(σα (t)) − Qv2
∫ t
0 ζ2(σα (t))dτ
f2(t) = −Qv1ζ1(σβ (t)) − Qv2∫ t
0 ζ2(σβ (t))dτ(5)
with
ζ1(σα (t)) = σα (t) + Qv3�σα� 12 (6)
ζ2(σα (t)) = σα (t) +Q2
v4
2sign(σα (t)) +
32�σα� 1
2 (7)
where Qv1, Qv2, Qv3, and Qv4 are properly chosen constants.Likewise, the other terms ζ1(σβ (t)) and ζ2(σβ (t)) can be com-puted by substituting σβ (t) instead of σα (t) in (6) and (7). Thelinear term Qv1ζ1(σαβ (t)) is mainly used to improve the con-vergence rate when the trajectories of the algorithm are far fromthe origin. If large, the convergence rate will increase. The gainsQv2 and Qv3 are used to obtain finite-time stability and rejectthe effect of uncertainties. If the gain Qv1 is high, it results ina large control input (possible saturation in practice), howeverconvergence rate becomes higher, which is used to compromisebetween size of control and convergence rate. If Qv2 magni-tude is selected higher than the perturbation term vαβ , the termQv2
∫ t
0 ζ2(σαβ (τ))dτ will dominate the perturbation. Further-more, the gains Qv2 and Qv3 are tuned to compromise betweenrobustness and size of the control. The gain Qv4 should be appro-priately tuned in order to do a compromise between robustnessand chattering alleviation. A tradeoff between robustness, rateof convergence, and size of the control should be determined totune the parameters.
The estimation error dynamics σα (t) = iα1 − iα , σβ (t) =iβ1 − iβ from (1) and (4) can be computed as
{σα = −R
L σα − 1L vα + 1
L f1(t)
σβ = −RL σβ − 1
L vβ + 1L f2(t)
. (8)
The boundedness of voltages can be established from (1) withpositive constants ρ1 and ρ2 as
{|vα | ≤ ρ1
|vβ | ≤ ρ2. (9)
Under the above condition (9), the convergence of σα and σβ
to the origin in finite-time can be ensured similar to [23]. Aftera finite-time, a smooth estimation of voltages can be obtainedas Qv2
∫ t
0 ζ2(σαβ (t))dτ . Since σα and σβ converge to zero infinite-time, one gets
{0 = Qv2
∫ t
0 ζ2(σα (t))dτ + vα
0 = Qv2∫ t
0 ζ2(σβ (t))dτ + vβ
. (10)
Hence, estimation of voltages can be achieved as follows:{
vα = −Qv2∫ t
0 ζ2(σα (t))dτ
vβ = −Qv2∫ t
0 ζ2(σβ (t))dτ. (11)
B. Estimation of Speed Based on HOSM Observer
In this section, stator currents (iα , iβ ), voltages (vα , vβ ) areconsidered as known quantities and speed (ωs) is treated as anunknown quantity. To estimate the speed, back-EMFs (eα , eβ )in (1) are considered as unknown inputs for the HOSM observer.Thereby, speed of the drive is computed using algebraic calcu-lations. The HOSM observer based on modified STA for themodel in (1) is designed as
⎧⎨
⎩
diα 2dt = −R
L iα2 + 1L vα + 1
L f3(t)diβ 2
dt = −RL iβ2 + 1
L vβ + 1L f4(t)
(12)
where the robust SM terms are given as{
f3(t) = −Qs1ζ1(σγ (t)) − Qs2∫ t
0 ζ2(σγ (t))dτ
f4(t) = −Qs1ζ1(σδ (t)) − Qs2∫ t
0 ζ2(σδ (t))dτ(13)
with
ζ1(σγ (t)) = σγ (t) + Qs3�σγ � 12 (14)
ζ2(σγ (t)) = σγ (t) +Q2
s4
2sign(σγ (t)) +
32�σγ � 1
2 (15)
where Qs1, Qs2, Qs3, and Qs4 are appropriately designed. Like-wise, the other terms ζ1(σδ (t)) and ζ2(σδ (t)) are computed bysubstituting σδ (t) instead of σγ (t) in (14) and (15).
Remark 1: It should be noted that the design procedure ofHOSM speed observer is similar to that of the HOSM voltageobserver in terms of gain selections and their effects on theconvergence rate.
The estimation error dynamics σγ (t) = iα2 − iα , σδ (t) =iβ2 − iβ from (1) and (12) can be computed as
{σγ = −R
L σγ + 1L eα + 1
L f3(t)
σδ = −RL σδ + 1
L eβ + 1L f4(t)
. (16)
The boundedness of voltages can be established from (1) withpositive constants ρ3 and ρ4 as
{|eα | ≤ ρ3
|eβ | ≤ ρ4. (17)
The condition (17) is not restrictive since ωs , Tl , eα and eβ , iαand iβ are continuous on a compact set.

20 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018
Similar to the previous subsection, a smooth estimation of theunknown back-EMFs can be obtained in finite-time as follows:
{eα = Qs2
∫ t
0 ζ2(σγ (t))dτ
eβ = Qs2∫ t
0 ζ2(σδ (t))dτ. (18)
Using the estimated back-EMF voltages and (2), the speed ofthe drive can be computed algebraically as
ωs =1
KE
√
e2α + e2
β . (19)
C. Estimation of Currents Based on LO
In this section, stator currents (iα , iβ ) are treated as unknownquantities and voltages (vα , vβ ), speed (ωs) are considered asknown quantities. By using LO, one can estimate these unknownstator currents in both α- and β- axes, respectively. Here, aLO is used instead of the HOSM observer as the choice of anappropriate sliding surface seems to be difficult and in fact notstraightforward.
The PMSM state model developed in the stationary referenceframe is given as
{dxdt = Ax + Bu
y = Cx(20)
where x =[iα iβ ωs θs
]Tis the state vector, u = [vα vβ Tl ]T
is the input vector, and y =[ωs θs
]Tis the output vector.
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
A =
⎡
⎢⎢⎢⎢⎢⎣
−RL 0 1
L KE sin θs 0
0 −RL − 1
L KE cos θs 0
−PJ φm sin θs
PJ φm cos θs −Fv
J 0
0 0 1 0
⎤
⎥⎥⎥⎥⎥⎦
B =
⎡
⎢⎢⎢⎢⎣
1L 0 0
0 1L 0
0 0 −1J
0 0 0
⎤
⎥⎥⎥⎥⎦
, C =
[0 0 1 0
0 0 0 1
]
.
The observer structure can be written as [28]
dx
dt= Ax + Bu + G(y − Cx) (21)
where x =[iα iβ ωs θs
]Tis the state estimation vector and G
is the observer gain matrix, which is selected to guarantee theerror stability. The error dynamics for the observer is obtainedfrom (20) and (21) as
dx
dt− dx
dt=
de
dt= (A − GC)e (22)
where estimation error is e = x − x. To ensure that the observer(21) is stable, the error dynamics (22) must be stable. The in-stantaneous eigen values of the observer have to be placed inthe left-half side in the complex or s plane as
det[sI − (A − GC)] = 0. (23)
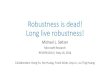
Fig. 1. Schematic view of the overall platform.
In order for the observer to be stable, all observer poles shouldhave negative real parts. Large negative real parts for the ob-server poles will result in faster convergence of the estimationerror. The desired eigenvalue locations are enforced through theselection of the observer gain matrix G [8], which will be givenin the results section.
IV. FTC DESIGN
The overall platform of the proposed FTC structure is de-picted in Fig. 1. Based on the design of observers, the followingresiduals can be considered to detect the faulty sensor as⎧⎪⎪⎪⎨
⎪⎪⎪⎩
Phase-a current residual, Ia,res = |ia − ia |Phase-b current residual, Ib,res = |ib − ib |DC-link voltage residual, Vαβ ,res = |vαβ − vαβ |Rotor speed residual, ωs,res = |ωs − ωs |
. (24)
The presence of fault can be detected by comparing the gen-erated residuals with the respective thresholds. If the faultyresidual exceeds the threshold, the fault can be detected andvice-versa [25]. A threshold that gives tradeoff between min-imum false alarm rate and detection delay, must be selecteddepending on the sensor noise, parameter variations and esti-mation errors. As a result, if a fault occurs in any of the sensors,the detection algorithm detects the fault and the reconfigurationstrategy feedbacks the corresponding estimated entity to providethe continuous drive operation.
The aforementioned FD scheme is well-suited for speedsensor faults as speed reference is generally set as constant.Since phase currents and voltages are in the form of sinewaves, the corresponding Boolean errors will be generated assquare waveforms in the presence of sensor faults. Boolean er-rors ϕi(i = α, β, a, b) are defined with the following simplelogic as
ϕi =
{1 if the residual is > threshold
0 otherwise. (25)
Consequently, the false alarm rate increases and cannot diag-nose the correct faulty sensor. Therefore, in addition to the

KOMMURI et al.: ROBUST SENSORS-FAULT-TOLERANCE WITH SLIDING MODE ESTIMATION AND CONTROL FOR PMSM DRIVES 21
above approach, a time-based analysis [29], [30] is introducedto guarantee the robustness against false detection. A fault de-tection time Tfault for the period of sensor fault presence can bedefined as
Tfault = fsTs (26)
where Ts is the sampling time and fs is sensitivity factorthat must be carefully selected by considering the detectiontime to achieve faster fault detection. If this value is too large,the sensor fault may not be detected and, if it is too small, thepossibility of false detection increases. Hence, fs should be se-lected considering the detection time (which in turn dependson the sampling time) to achieve faster sensor fault detection.Therefore, based on the above Boolean errors and the fault de-tection time, the fault can be detected using a flag as
Flagi =
{1 if te ≥ Tfault
0 otherwise(27)
where te is defined as the elapsed time from the beginning ofBoolean errors in (25) to the arriving at the fault detection timeTfault. Indeed, the value 1 of Flagi signifies a fault and vice-versa. Hence, the reconfiguration strategy replaces the faultycurrent or voltage with the estimated variable when the faultyflag becomes 1.
Moreover, the generalized control law for speed and currents(dq− axes) to track their respective references is designed as
Uj = −κ1j |σj | 12 sign(σj ) − κ2j
∫ t
0sign(σj )dτ − κ3j σj (28)
where σj with j = ωs, id , iq are the sliding surfaces definedas the difference between the reference entity and the actualentity, such as speed and current tracking errors. The controllergains κ1j , κ2j , κ3j > 0 have to be tuned to ensure tracking errorsconverge in finite-time. Indeed, the gains κ1j and κ2j are usedto obtain finite-time stability, chattering reduction, and rejectthe effect of uncertainties. Moreover, κ3j is used to improvethe convergence rate. It should be noted that the tracking errorscomprises reference and actual signals in the absence of faults.On the other hand, in the event of fault, the error dynamics willchange according to the estimated signals. The tracking errorscan be represented as follows:
σωs=
{ωref
s − ωs in the absence of fault
ωrefs − ωs in the presence of fault
(29)
σid=
{irefd − id in the absence of fault
irefd − id in the presence of fault
(30)
σiq=
{irefq − iq in the absence of fault
irefq − iq in the presence of fault
. (31)
Remark 2: It can be noted that the currents (id , iq ) are com-puted from phase currents estimation (ia , ib) by applying for-ward transformations in the event of fault either in ia or ib .
TABLE ISPECIFICATIONS OF PMSM
Quantity Symbol Value
Rated speed ωs 4000 [r/min]Stator resistance R 2.0 [Ω]Stator inductance L 0.51 [mH]Back-EMF constant KE 0.156 [Vs/rad]Number of poles P 8
For ease of exposition, the speed control law is designed byconsidering first and second time derivatives of σωs
as follows:
σωs= ωs
ref − ωs
= ωsref − P
Jφm iq +
Fv
Jωs +
Tl
J. (32)
Similarly, for σωs, taking the time derivative, one can obtain
σωs= ωs
ref − P
Jφm
[ −RL iq − ωsid − 1
L KE ωs + 1L Vq
]
+Fv
J
[PJ φm iq − Fv
J ωs − Tl
J
]+
Tl
J
= ωsref +
PR
JLφm iq +
P
Jφm ωsid +
P
JLφm KE ωs
− P
JLφm Vq − Fv
J2Pφm iq − F 2
v
J2ωs − FvTl
J2.
Hence, the implemented control law is deduced as follows:
Vq =JL
Pφm
[P RJ L φm iq + P
J φm ωsid + PJ L φm KE ωs
]
−Fv
J2Pφm iq +
F 2v
J2ωs +
Fv
J2Tl + Uωs
. (33)
Remark 3: By properly tuning the gains κ1j , κ2j , κ3j , it canbe ensured that the convergence of sliding surface σωs
to theorigin in finite-time. It can be noted that the convergence analysisfor the currents (id , iq ) is similar to the speed dynamics.
V. PERFORMANCE EVALUATION AND DISCUSSIONS
In this section, simulation and experimental results are re-ported to evaluate the effectiveness of the proposed FTC scheme.Moreover, few remarks/observations regarding the implemen-tation are discussed followed by results.
A. Simulation Results
Simulation results with a realistic PMSM model by con-sidering all the possible dynamics are presented to illus-trate the proposed FTC performance. The motor parame-ters and their rated values are given in Table I. The gainvalues of both voltage and speed HOSM observers are se-lected as follows: Qv1 = 0.7, Qv2 = 65, Qv3 = 30, Qv4 = 4.0,Qs1 = 0.7, Qs2 = 60, Qs3 = 35, and Qs4 = 4.5. Furthermore,
the gain matrix G of a LO is selected as
[0.1 0.1 0.05 0.0010.1 0.1 0.05 0.01
]T
.
Moreover, speed controller gains are selected as κ1ωs=

22 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018
Fig. 2. Performance of observers. (a) and (b) Voltages estimation andits error using HOSM observer. (c) and (d) Speed estimation and itserror using HOSM observer. (e) and (f) Currents estimation and its errorusing LO.
10.5, κ2ωs= 80, and κ3ωs
= 5. Indeed, id and iq controllergains are selected as κ1id
= 0.001, κ2id= 20, κ3id
= 0.001,κ1iq
= 0.001, κ2iq= 100, and κ3iq
= 0.001. The thresholdvalues for accurate fault detection are selected as: Vthd =1.5 V, ωthd = 20 r/min, and Ithd = 0.05 A. In this paper, thesensitivity factor in (26) is set as 3, therefore, the total timeneeded for the sensor fault detection is Tfault = 3 ms.
1) Performance of Closed-Loop Control and Observers inthe Absence of Faults: In order to analyze the closed-loop con-trol and the performance of observers, a speed profile that startstoward 400 r/min is considered, and after it has stabilized, att = 1.5 s, the speed command is abruptly changed to 500 r/min.Initially, the controller gains are tuned to achieve actual speedand currents to track their respective references. On the otherhand, the performance of observers which are running in parallelto the closed-loop system in the absence of faults are depictedin Fig. 2. For the first observer, the considered unknown volt-ages vα , vβ are estimated using HOSM observer as shown in
Fig. 2(a). The estimated voltages are well matched with theactual voltages, which can be observed using estimation errorsshown in Fig. 2(b). In the same way, the unknown speed of thedrive considered for the second observer is estimated using (19)with help of back-EMFs shown in Fig. 2(c). Indeed, the esti-mated speed exactly tracks the desired speed reference whichis highlighted using speed error shown in Fig. 2(d). Further-more, performance of LO to estimate the currents is depicted inFig. 2(e) and the corresponding estimation errors are shown inFig. 2(f). It can be inferred from closed-loop control and perfor-mance of observers that if a fault occurs in any of the sensors,the corresponding estimated variable (which is readily avail-able) can be used for closed-loops instead of the faulty sensorto continue the drive operation.
2) Closed-Loop FTC With a Faulty Voltage Sensor: The per-formance of the proposed FTC approach in the presence of volt-age sensor fault is depicted in Fig. 3, where a voltage sensor faultis applied at t = 1.0 s. The faulty voltages are shown in Fig. 3(a)and the corresponding residuals obtained using estimated volt-ages (attained when nonfaulty currents and speed are used forthe voltage observer) are shown in Fig. 3(b), where residualsafter the fault occurrence (at t = 1.0 s) cross the threshold. Dueto the square waveforms of corresponding Boolean errors, thefalse alarm rate increases and cannot isolate the faulty sensor.Therefore, the elapsed time te shown in Fig. 3(c) is triggered tomeasure the time until the Boolean errors are detected by (25).The time te elapses continuously and sets Flagi to 1 if it reachesor exceeds the fault detection time Tfault as shown in Fig. 3(d).Hence, when the Flagi sets to 1—the voltage sensor fault is de-tected and the reconfiguration mechanism feeds the estimatedvoltages for the control-loop. Consequently, the control-loopruns with the estimated voltages to achieve uninterrupted driveoperation—the continuous operation can be realized using thevoltage errors shown in Fig. 3(e). Furthermore, the fault detec-tion performance with LO in the presence of voltage fault viatheir residuals is shown Fig. 3(f). Similarly, the correspondingspeed observer residual is depicted in Fig. 3(g). It can be high-lighted that the residuals of currents and speed observers afterthe voltage sensor fault reconfiguration are omitted since the twoobservers are of no use for the closed-loop control. The residu-als in Fig. 3(f) and (g) are shown until t = 1.1 s to highlight thatthe residuals are within the threshold during the voltage sensorfault detection.
3) Closed-Loop FTC With a Faulty Speed Sensor: In thiscase, a complete speed sensor outage (which is the worst sensorfault) at t = 1.0 s is considered and the performance of over-all FTC is shown in Fig. 4. In Fig. 4(a) and (b), the reference,faulty, actual speeds, and the corresponding fault detection per-formance are demonstrated. As the fault is applied at t = 1.0 s,the measured speed drops to zero, however, the actual speedcontinues to track the speed reference due to the switching ofestimated speed to the control-loop. The transition from mea-sured to the estimated speeds in the event of fault is smooth andhighlighted in the zoom portion. It can also be noted that theactual speed (i.e., estimated speed) after the fault reconfigura-tion well-tracks even under a rapid change at t = 1.5 s. Fig. 4(c)and (d) shows voltage and phase currents residuals with respect

KOMMURI et al.: ROBUST SENSORS-FAULT-TOLERANCE WITH SLIDING MODE ESTIMATION AND CONTROL FOR PMSM DRIVES 23
Fig. 3. FTC performance in the presence of voltage sensor fault att = 1.0 s. (a) and (b) Faulted voltages and the corresponding residuals.(c) and (d) Fault detection performance: the zoomed-in portion highlightsthe detection delay and the corresponding flag. (e) Voltage errors afterthe fault reconfiguration. (f) Phase currents residuals. (g) Speed residual.
to their thresholds. A change in the residuals during speed sen-sor fault detection can be observed, however, they are belowthe threshold levels and cannot affect the system performance.Hence, it can be highlighted that the fault in speed sensor iswell-isolated by reconfiguring with the estimated speed and thedrive continues to perform the desired speed control objective.
4) Closed-Loop FTC With a Faulty Phase Current Sensor:Moreover, phase current sensor fault has been considered hereto validate the proposed scheme as depicted in Fig. 5. Thephase−a current sensor fault considered at t = 1.0 s is shown inFig. 5(a). The corresponding residuals in both αβ− axes have
Fig. 4. FTC performance in the presence of an abrupt speed sensorfault at t = 1.0 s. (a) and (b) Faulty, actual speeds and its residual. Thezoomed-in portions show the speed transition and effectiveness of thecontroller under a rapid change in speed reference. (c) and (d) Voltagesand phase currents residuals.
been computed, in which, the phase−a current residual crossesthe preset threshold value as shown in Fig. 5(b). Fig. 5(c) and(d) shows the result of fault detection algorithm with time-basedanalysis, where the faulty flag becomes 1 during the sensorfault detection. Furthermore, the residuals of voltage and speedobservers with their respective residuals are shown in Fig. 5(e)and (f). It can be highlighted that although the reconfigurationeffects the other observers performance, the residuals remainbelow their respective thresholds. The zoom portions highlightthe change in performance during the fault detection. It shouldbe noted that the validation of FTC performance in the presenceof phase−b current sensor fault is avoided because the controlperformance is similar.
B. Experimental Results
Experimental results on a laboratory testbed shown in Fig. 6[SMC150 EVM with TMS320F28335 digital signal process-ing (DSP) controller made by Syncworks] are reported to val-idate the proposed FTC algorithm. In order to implement thepropose FTC scheme in a real-time scenario, a code composerstudio has been used—it comprises a suite of tools (C/C++ com-piler, source code editor, project build management, debugger,profiler, and many other features) to develop and debug em-bedded applications. All the software modules to manage thePMS motor are written in C/C++ compiler and implementedin the TMS320F28335 DSP controller. TMS320F28335 DSPhas a single-precision (32-bit) IEEE 754 floating-point unit,

24 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018
Fig. 5. FTC performance in the presence of phase−a current sensorfault at t = 1.0 s. (a) and (b) Estimated phase currents using LO andcurrents with faulty phase−a. (c) Currents residuals with their threshold.(d) and (e) Process of the fault detection algorithm. The zoomed-in por-tion highlights the detection delay. (f) and (g) Voltage and speed residualsafter the reconfiguration.
Fig. 6. Overview of the experimental setup.
Fig. 7. FTC performance in the presence of voltage sensor fault att = 0.5 s under 20% electric parameter variations. (a) and (b) Faultyphase voltages and their residuals using HOSM observer. (c) Faultyflag indicating the presence of fault. (d) Voltage errors after the faultreconfiguration. (e) and (f) Phase currents and speed residuals.
high-performance static CMOS (6.67-ns cycle time), and 12-bitanalog-to-digital converter (ADC) with 16 channels. The real-time code with which the DSP runs, can be loaded from the Flashmemory or from static random access memory (SRAM− 34KB). The developed code inside the DSP is based on the princi-ple of interruptions. The switching frequency of the pulse-widthmodulation (PWM) inverter is 15 kHz.
A constant speed reference of 1000 r/min is considered to val-idate the effectiveness of proposed FTC scheme. At first, a volt-age sensor fault is considered at t = 0.5 s and the performanceunder 20% electric parameter (R,L) variations are shown inFig. 7. The faulty voltages and the corresponding residuals withthe selected threshold are shown in Fig. 7(a) and (b). The voltagesensor fault has been well detected using the time-based analysiswith fault detection time Tfault = 200 μs and the corresponding

KOMMURI et al.: ROBUST SENSORS-FAULT-TOLERANCE WITH SLIDING MODE ESTIMATION AND CONTROL FOR PMSM DRIVES 25
Fig. 8. FTC performance in the presence of speed sensor fault att = 0.5 s. (a) and (b) Actual, measured speeds and its residual withthreshold. (c) Voltage residuals. (d) Phase currents residuals.
faulty flag indicating the detection of fault presence is depictedin Fig. 7(c). Indeed, Fig. 7(d) shows the reconfiguration per-formance at t = 0.5 s when the estimated voltages are fed backto the control-loop. A spike during the switching, magnitude,and phase distortion after the reconfiguration can be observed.Moreover, the corresponding phase currents and speed residualswithin their residuals during the fault detection are depicted inFig. 7(e) and (f). It can be inferred that the drive continues tooperate in the presence of voltage sensor fault under 20% para-metric variations (which signifies the robustness of proposedapproach), without affecting the other observers performance.However, it can be noted that the threshold has to be adjusted ac-cording to the higher levels of parametric uncertainties to avoidfalse alarms.
In the second case, a speed sensor fault is considered and theresulted FTC performance is depicted in Fig. 8. The speed sen-sor fault is applied at t = 0.5 s and the fault is detected immedi-ately when the residual crosses the threshold shown in Fig. 8(a)and (b). Indeed, the estimated speed (which is filtered due tohigher measurement noises) switches to the control-loop andthe controller regulates the speed to track the desired speed ref-erence. A small dip (motor slow down) can be observed duringthe fault reconfiguration due to immediate speed transition. Theestimated speed takes little time to adapt the system controlleddynamics after the abrupt transition. Furthermore, the other volt-age and phase currents residuals can be observed along with theirresiduals in Fig. 8(c) and (d). Similarly, a phase−a sensor FTCperformance is depicted in Fig. 9, in which, the faulty phasecurrents and the corresponding residuals have been shown in
Fig. 9. FTC performance in the presence of phase−a sensor faultat t = 0.5 s. (a) and (b) Faulty phase currents and their residuals.(c) Currents errors after the fault reconfiguration. (d) and (e) Voltagesand speed residuals.
Fig. 9(a) and (b). The phase currents estimation errors after thefault reconfiguration is shown in Fig. 9(c). The correspondingvoltage and speed residuals during fault detection can be de-picted in Fig. 9(d) and (e). It can be inferred that the controllersregulate well in the presence of speed and phase current sensorfaults to achieve stable drive operation. It should be noted thatthe validation of FTC performance in the presence of phase−bcurrent sensor fault is avoided because the control performanceis similar.
C. Discussions
In a practical operating conditions of the drive, the probabil-ity of simultaneous multisensor faults is very low. Since threekinds of sensors are required for field-orientation control of thePMSM drive and each observer operates with two sensors in-formation to estimate the considered unknown sensor variable,the proposed method may not work for simultaneous multisen-sor faults. However, the proposed method may work well forsmaller size of the faults (low amplitude faults) that can oc-cur simultaneously. Moreover, if one sensor fault occurs at aparticular instant of time, the proposed approach can handle

26 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018
Fig. 10. Comparison performance for FTC of multi-sensors. (a) and(b) Proposed FTC approach. (c) and (d) Classical SMOs’ with PIcontrollers.
the other sensor fault after the reconfiguration of earlier sensorsince the drive is under stable operating condition. A structuralreformation with the logical DMU is necessary to handle thesimultaneous multisensor faults, which is out of the scope ofthis paper and will be considered as a future work.
To highlight the advantages of proposed HOSM observers andcontrollers-based FTC approach, conventional SM observers[16] and PI controllers have been employed for FTC of mul-tisensors (Phase−a and speed sensors) and the performance isdepicted in Fig. 10. The performance of proposed approach isshown in Fig. 10(a) and (b), where phase−a sensor fault att = 0.8 s and speed sensor fault at t = 1.2 s are introduced. Itcan be seen in Fig. 10(a) that actual speed accurately tracks thedesired speed even in the presence of considered two sensorfaults and highlighted the speed sensor fault reconfiguration.Moreover, the effect of phase−a sensor fault is highlighted inFig. 10(b) with the speed residual as the fault corrupts the speedestimation performance during the fault reconfiguration. Simi-larly, FTC of multisensors with conventional SM observers andPI controllers are shown in Fig. 10(c) and (d). In conventionalSM observers, external low-pass filters are used to extract theback-EMFs, therefore, the estimated speed has ripples due toits tradeoff design shown in Fig. 10(d). It can be further ob-served that the use of PI controllers results large overshoot,poor steady-state accuracy, and slow dynamic response.
The dynamic current-control performance in the dq-axes ref-erence for the case of phase current−a sensor FTC is shownin Figs. 11 and 12. Fig. 11(a) shows the reference and actualcurrents in d− axis reference frame, where the change in actual
Fig. 11. Simulations − Current control under phase−a sensor fault.(a) Current dynamics in d− axis. (b) Current dynamics in q− axis.
Fig. 12. Experiments − Current control under phase−a sensor fault.(a) Current dynamics in d− axis. (b) Current dynamics in q− axis.
current during the fault reconfiguration is highlighted. Fig. 11(b)shows actual and reference currents in q− axis reference frame.Since reference current iref
q is the output of the HOSM speedcontroller, it contains the chattering phenomenon. It should benoted that the spike at t = 1.5 s is due to the rapid change in de-sired speed reference. Similarly, for a constant speed referenceof 1000 r/min in experimental results, Fig. 12(a) shows the ac-tual and reference currents in d− axis reference frame. A clearchange in the actual current after the instant of fault presence att = 0.5 s can be observed. Moreover, the actual and referencecurrents in q− axis reference frame are depicted in Fig. 12(b).
It is worth to point out that the proposed FTC scheme iscomputationally complex, however, it has more advantages thanthe earlier approaches, toward achieving an ideal solution forall three kinds of sensors faults. In general, FTC can also beachieved with hardware redundancy, such as extra sensors, atextra cost. The proposed FTC only requires extra computationalpower, however, the TMS320F28335 DSP with efficient mathprocessing capabilities makes it easier.
Higher order SM (HOSM) observers/controllers based onSTA are gaining interest in the recent literature due totheir unique features/advantages, such as chattering attenu-ation, accurate regulation, finite-time convergence, and ro-bustness against bounded uncertainties (see [7], [31], and[32] for various practical applications). However, formally the

KOMMURI et al.: ROBUST SENSORS-FAULT-TOLERANCE WITH SLIDING MODE ESTIMATION AND CONTROL FOR PMSM DRIVES 27
computer-implementations of the HOSM controllers require thedynamic parts of controllers be integrated with infinitesimallysmall integration step, while the control be fed to the systemcontinuously. Indeed, it complicates the realization in practicalscenarios under measurement noises, delays and discrete mea-surements, and leads to higher chattering with uneven or longsampling periods.
VI. CONCLUSION
Unlike existing schemes limited to one or two sensors FTC,a novel FTC framework to deal with all the sensors (voltage,speed, and currents) faults is proposed in this paper based on ad-vanced robust HOSM observers and controllers. The employedHOSM controllers ensured smooth transition during fault re-configuration and faster convergence with high steady-state ac-curacy for rapid changes around the operating speed condition.Moreover, a comparison analysis with standard approach (clas-sical SMOs and PI controllers) for the case of multisensors FTCis demonstrated. Moreover, a FD algorithm with time-basedanalysis is employed for sinusoidal voltages and currents toachieve robustness against false detection. Evaluation results(both simulations and experiments) are presented to validate thefeasibility and effectiveness of the proposed FTC approach.
REFERENCES
[1] K. Cho, J. Kim, S. B. Choi, and S. Oh, “A high-precision mo-tion control based on a periodic adaptive disturbance observer in aPMLSM,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 5, pp. 2158–2171, Oct. 2015.
[2] T. D. Do, H. H. Choi, and J. W. Jung, “Nonlinear optimal DTC designand stability analysis for interior permanet magnet synchronous motordrives,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 6, pp. 2716–2725,Dec. 2015.
[3] S. Yin, H. Luo, and S. X. Ding, “Real-time implementation of fault-tolerant control systems with performance optimization,” IEEE Trans.Ind. Electron., vol. 61, no. 5, pp. 2402–2411, May 2014.
[4] Y. Su, C. Zheng, and P. Mercorelli, “Nonlinear PD fault-tolerantcontrol for dynamic positioning of ships with actuator constraints,”IEEE/ASME Trans. Mechatronics, vol. 22, no. 3, pp. 1132–1142,Jun. 2017.
[5] H. Moussa, D. Lee, and K. C. Veluvolu, “Rotor speed-based bear-ing fault diagnosis (RSB-BFD) under variable speed and constantload,” IEEE Trans. Ind. Electron., vol. 62, no. 10, pp. 6486–6496,Oct. 2015.
[6] A. Akrad, M. Hilairet, and D. Diallo, “Design of a fault tolerant controllerbased on observers for a PMSM drive,” IEEE Trans. Ind. Electron., vol. 58,no. 4, pp. 1416–1427, Apr. 2011.
[7] S. K. Kommuri, M. Defoort, H. R. Karimi, and K. C. Veluvolu, “A ro-bust observer-based sensor fault-tolerant control for PMSM in electricvehicles,” IEEE Trans. Ind. Electron., vol. 63, no. 12, pp. 7671–7681,Dec. 2016.
[8] C. Choi, K. Lee, and W. Lee, “Observer-based phase-shift fault detectionusing adaptive threshold for rotor position sensor of permanent-magnetsynchronous machine drives in electromechanical brake,” IEEE Trans.Ind. Electron., vol. 62, no. 3, pp. 1964–1974, Mar. 2015.
[9] G. H. B. Foo, X. Zhang, and D. M. Vilathgamuwa, “Sensor fault-resilient control of interior permanent-magnet synchronous motordrives,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 2, pp. 855–864,Apr. 2015.
[10] C. C. Chen, S. S. D. Xu, and Y. W. Liang, “Study of nonlinear integralsliding mode fault-tolerant control,” IEEE/ASME Trans. Mechatronics,vol. 21, no. 2, pp. 1160–1168, Apr. 2016.
[11] H. Wang, S. Pekarak, and B. Fahimi, “Multilayer control of an inductionmotor drive: A strategic step for automotive applications,” IEEE Trans.Power Electron., vol. 21, no. 3, pp. 676–686, May 2006.
[12] F. R. Salmasi, T. A. Najafabadi, and P. J. Maralani, “An adaptive fluxobserver with online estimation of DC-link voltage and rotor resistancefor VSI-based induction motors,” IEEE Trans. Power Electron., vol. 25,no. 5, pp. 1310–1319, May 2010.
[13] K. Rothenhagen and F. W. Fuchs, “Doubly fed induction generator model-based sensor fault detection and control loop configuration,” IEEE Trans.Ind. Electron., vol. 56, no. 10, pp. 4229–4238, Oct. 2009.
[14] T. A. Najafabadi, F. R. Salmasi, and P. Jabehdar-Maralani, “Detection andisolation of speed, DC-link voltage and current sensors faults based on anadaptive observer in induction motor drives,” IEEE Trans. Ind Electron.,vol. 58, no. 5, pp. 1662–1672, May 2011.
[15] G. H. B. Foo, X. Zhang, and D. M. Vilathgamuwa, “A sensor fault detectionand isolation method in interior permanent magnet synchronous motordrives based on an extended Kalman filter,” IEEE Trans. Ind. Electron.,vol. 60, no. 8, pp. 3485–3495, Aug. 2013.
[16] V. Utkin, J. G. Guldner, and J. Shi, Sliding Mode Control on Elec-tromechanical Systems, 1st ed. New York, NY, USA: Taylor & Francis,1999.
[17] N. Lashkari, M. Biglarbegian, and S. X. Yang, “Development of a newrobust controller with velocity estimator for docked mobile robots: The-ory and experiments,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 3,pp. 1287–1298, Jun. 2017.
[18] M. Comanescu, “An induction-motor speed estimator based on integralsliding-mode current control,” IEEE Trans. Ind. Electron., vol. 56, no. 9,pp. 3414–3423, Sep. 2009.
[19] Y. Wang and Z. Sun, “Dynamic analysis and multivariable transient controlof the power-split hybrid powertrain,” IEEE/ASME Trans. Mechatronics,vol. 20, no. 6, pp. 3085–3097, Dec. 2015.
[20] M. H. Choi, B. Shirinzadeh, and R. Porter, “System identification-basedsliding mode control for small-scaled autonomous aerial vehicles withunknown aerodynamics derivatives,” IEEE/ASME Trans. Mechatronics,vol. 21, no. 6, pp. 2944–2952, Dec. 2016.
[21] L. Fridman and A. Levant, “Higher order sliding modes,” in Sliding ModeControl in Engineering, J. P. Barbot and W. Perruquetti Eds. New York,NY, USA: Marcel Dekker, 2002.
[22] J. J. Rath, K. C. Veluvolu, M. Defoort, and Y. C. Soh, “Higher-ordersliding mode observer for estimation of tyre friction in ground vehicles,”IET Control Theory Appl., vol. 8, no. 6, pp. 399–408, Apr. 2014.
[23] J. Moreno and M. Osorio, “Strict Lyapunov functions for the super-twisting algorithm,” IEEE Trans. Automat. Control, vol. 57, no. 4,pp. 1035–1040, Apr. 2012.
[24] J. V. Gorp, M. Defoort, M. Djemai, and K. C. Veluvolu, “Fault detectionbased on higher-order sliding mode observer for a class of switched lin-ear systems,” IET Control Theory Appl., vol. 9, no. 15, pp. 2249–2256,Oct. 2015.
[25] S. K. Kommuri, J. J. Rath, K. C. Veluvolu, M. Defoort, and Y. C. Soh,“Decoupled current control and sensor fault detection with second-ordersliding mode for induction motor,” IET Control Theory Appl., vol. 9, no. 4,pp. 608–617, Feb. 2015.
[26] Y. Feng, X. Yu, and F. Han, “High-order terminal sliding mode ob-server for parameter estimation of a permanent-magnet synchronousmotor,” IEEE Trans. Ind. Electron., vol. 60, no. 10, pp. 4272–4280,Oct. 2013.
[27] M. L. Corradini, G. Ippoliti, S. Longhi, and G. Orlando, “A qua-sisliding mode approach for robust control and speed estimation ofPM synchronous motors,” IEEE Trans. Ind. Electron., vol. 59, no. 2,pp. 1096–1104, Feb. 2012.
[28] B. Tabbache, M. Benbouzid, A. Kheloui, and J. Bourgeot, “Virtual sensorbased maximum likelihood voting approach for fault tolerant control ofelectric vehicle powertrains,” IEEE Trans. Veh. Technol., vol. 62, no. 3,pp. 1075–1083, Mar. 2013.
[29] S. M. Jung, J. S. Park, H. W. Kim, K. Y. Cho, and M. J. Youn, “An MRAS-based diagnosis of open-circuit fault in PWM voltage-source inverters forPM synchronous motor drive systems,” IEEE Trans. Power Electron.,vol. 28, no. 5, pp. 2514–2526, May 2013.
[30] A. Youssef, S. Khil, and I. Slama-Belkhodja, “State observer-based sensorfault detection and isolation, and fault tolerant control of a single-phasePWM rectifier for electric railway traction,” IEEE Trans. Power Electron.,vol. 28, no. 12, pp. 5842–5853, Dec. 2013.
[31] S. K. Kommuri, J. J. Rath, and K. C. Veluvolu, “Sliding mode basedobserver-controller structure for fault-resilient control in DC servomo-tors,” IEEE Trans. Ind. Electron., vol. 65, no. 1, pp. 918–929, Jan. 2018.
[32] H. Imine and T. Madani, “Heavy vehicle suspension parameters identi-fication and estimation of vertical forces: Experimental results,” Int. J.Control, vol. 88, no. 2, pp. 324–334, Sep. 2015.

28 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 23, NO. 1, FEBRUARY 2018
Suneel Kumar Kommuri (S’15–M’17) receivedthe B.Tech. degree in electrical and electronicsengineering from Acharya Nagarjuna University,Guntur, India, in 2010, and the M. S. and Ph.D.degrees in embedded systems and control en-gineering from the School of Electronics Engi-neering, Kyungpook National University, Daegu,South Korea, in 2013 and 2016, respectively.
He is currently a Research Professor with theSchool of Electrical Engineering, Korea Univer-sity, Seoul, South Korea. His research interests
include sliding mode control, fault diagnosis and fault-tolerant control,high-resistance connections, and analysis of electric machines.
Dr. Kommuri is a member of the IEEE Industrial Electronics and IEEEIndustry Applications Societies.
Sang Bin Lee (S’95–M’01–SM’07–F’17) re-ceived the B.S. and M.S. degrees from KoreaUniversity, Seoul, South Korea, in 1995 and1997, respectively, and the Ph.D. degree fromthe Georgia Institute of Technology, Atlanta, GA,USA, in 2001, all in electrical engineering.
From 2001 to 2004, he was at the GeneralElectric Global Research Center, Schenectady,NY, USA, where he worked on testing of mo-tors and synchronous generators. From 2010 to2011, he was a Research Scientist at the Aus-
trian Institute of Technology Research Lab, Vienna, Austria, where heworked on diagnostics of permanent magnet synchronous machines.From 2017 to 2018, he was a Consultant at Qualitrol—Iris Power Engi-neering, Toronto, ON, Canada, and a Visiting Researcher at the Univer-sity of Waterloo, Waterloo, ON, where he worked on testing of medium–high voltage machines. Since 2004, he has been a Professor of electricalengineering with Korea University. His current research interests includetesting, condition monitoring, and diagnostics of electric machines anddrives.
Dr. Lee was the recipient of the Diagnostic Achievement Award in2017 from the IEEE Power Electronics Society (PELS). He served as aDistinguished/Prominent Lecturer (2014–2016) for the IEEE Industry Ap-plications Society (IAS), and serves as an Associate Editor for the IEEETRANSACTIONS ON INDUSTRY APPLICATIONS and the IEEE IAS Electric Ma-chines Committee (EMC). He was the recipient of 14 IEEE Prize PaperAwards from the IEEE Power Engineering Society, IEEE IAS, IEEE IASEMC, IEEE IAS Industrial Drives Committee, Technical Committee onDiagnostics of the IEEE PELS, and the Pulp and Paper Industry Com-mittee of IEEE IAS.
Kalyana Chakravarthy Veluvolu (S’03–M’06–SM’13) received the B.Tech. degree in electricaland electronic engineering from Acharya Na-garjuna University, Guntur, India, in 2002, andthe Ph.D. degree in electrical engineering fromNanyang Technological University, Singapore, in2006.
During 2006–2009, he was a Research Fel-low in the Biorobotics Group, Robotics Re-search Center, Nanyang Technological Univer-sity. Since 2009, he has been with the School of
Electronics Engineering, Kyungpook National University, Daegu, SouthKorea, where he is currently an Associate Professor. He was alsoattached to the School of Mechanical and Aerospace Engineering,Nanyang Technological University, as a Visiting Professor in 2016–2017.He has been a Principal Investigator or a Co-Investigator on a number ofresearch grants funded by the National Research Foundation of Koreaand other agencies. He has authored or co-authored more than 100 jour-nal articles and conference proceedings. His current research interestsinclude nonlinear estimation and filtering, sliding mode control, brain–computer interface, EEG-based neural decoding, autonomous vehicles,biomedical signal processing, and surgical robotics.