Embed Size (px)
Citation preview

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE/ACM TRANSACTIONS ON NETWORKING 1
Bounded-Mean-Delay Throughput and NonstarvationConditions in Aloha Network
Soung Chang Liew, Senior Member, IEEE, Ying Jun (Angela) Zhang, Member, IEEE, andDa Rui Chen, Student Member, IEEE
Abstract—Prior investigations on the Aloha network have pri-marily focused on its system throughput. Good system throughput,however, does not automatically translate to good delay perfor-mance for the end users. Neither is fairness guaranteed: Someusers may starve, while others hog the system. This paper es-tablishes the conditions for bounded mean queuing delay andnonstarved operation of the slotted Aloha network. We focus onthe performance when collisions of packets are resolved using anexponential backoff protocol. For a nonsaturated network, wefind that bounded mean delay and nonstarved operation can beguaranteed only if the offered load is limited to below a quantitycalled “safe bounded mean-delay (SBMD) throughput.” TheSBMD throughput can be much lower than the saturation systemthroughput if the backoff factor in the exponential backoffalgorithm is not properly set. For example, it is well known thatthe maximum throughput of the Aloha network is �
� � ����.However, for � �, a value assumed in many prior investigations,the SBMD throughput is only 0.2158, a drastic penalty of 41%relative to 0.3679. Fortunately, using � � ��� allows us toobtain an SBMD throughput of 0.3545, less than 4% away from0.3679. A general conclusion is that the system parameters cansignificantly affect the delay and fairness performance of theAloha network. This paper provides the analytical framework andexpressions for tuning and other system parameters to achievegood delay and nonstarved operation.
Index Terms—Access protocols, network performance, wirelessLAN.
I. INTRODUCTION
T HE Aloha network has been studied extensively since thepioneer work by Abramson [1]. Prior work on the Aloha
network has primarily focused on its overall system throughput.To achieve good system throughput, the transmission probabil-ities of the nodes must be adjusted dynamically according tothe contention intensity in the network. An exponential backoffprotocol can serve this purpose rather effectively [2].
Good system throughput, however, does not automaticallytranslate to acceptable performance from the end user perspec-tive. For example, if a real-time application such as a voice call is
Manuscript received July 14, 2008; approved by IEEE/ACM TRANSACTIONS
ON NETWORKING Editor D. Rubenstein. This work was supported by the Com-petitive Earmarked Research Grant (Projects 414106 and 418707) establishedunder the University Grant Committee of the Hong Kong Special Administra-tive Region, China.
The authors are with the Department of Information Engineering, The Chi-nese University of Hong Kong, Shatin, Hong Kong (e-mail: [email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TNET.2009.2013340
running on top the Aloha network, delay performance is impor-tant. Even if the end application is not a real-time application,there is also the fairness issue, wherein some nodes in the Alohanetwork are starved while other nodes enjoy good service. Forexample, for a TCP application, starvation could cause prema-ture termination of its TCP connection due to time-out.
This paper is devoted to the study of how to ensure good delayand nonstarved performance in a slotted Aloha network oper-ated with an exponential backoff protocol. In particular, we areinterested in the setting of system parameters to attain not justgood overall system throughput but also good delay and fairnessperformance. Within this context, this paper has two major con-tributions.
1) We establish an analytical framework for the study ofqueuing delay and starvation in the Aloha network.
2) Based on the analytical framework, we derive the depen-dency of delay and nonstarvation on the system parame-ters.
With respect to contribution 1), we unite the concepts ofbounded mean-delay performance and nonstarvation, arguingthat the conditions giving rise to them are one in the same ina nonsaturated Aloha network; namely, the service time at theheads of queues must be bounded. We find that the “saturationthroughput,” a performance metric of focus in many priorstudies, is not a sound measure of performance if we careabout delay and nonstarved operation. In particular, to achievegood delay and nonstarved operation, the offered load mustbe below another quantity called “safe bounded mean-delay(SBMD) throughput,” which can be substantially lower thanthe saturation throughput. In establishing our analytical frame-work, we find that the delay analysis is much trickier than thesaturation-throughput analysis in prior work. To better bringout the subtleties involved, we decompose our analysis intothree steps: 1) a global analysis that captures the interactionamong nodes; 2) a local analysis that captures the dynamicwithin a node; and 3) a coupling analysis that integrates 1) and2) into a coherent whole. Steps 2) and 3) in the delay analysis,in particular, are a lot more involved than steps 2) and 3) in thesaturation analysis.
With respect to contribution 2), we show that delay and non-starvation can be very sensitive to the system parameters, muchmore so than the saturation throughput is. For example, it iswell known that the maximum saturation throughput of a largeslotted Aloha network with many nodes is . Anexponential backoff factor of 2 (see Section II-A for the defi-nition of the backoff factor) was commonly assumed in manyprior studies [3], [4]. It can achieve a saturation throughput of0.3466 [2]. Thus, a backoff factor of 2 is quite satisfactory whenit comes to saturation throughput performance. However, if wedesire bounded mean-delay and nonstarved performance, we
1063-6692/$25.00 © 2009 IEEE
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE/ACM TRANSACTIONS ON NETWORKING
must limit the system-offered load to below 0.2158, a drasticpenalty of 41% with respect to the maximum throughput. For-tunately, using a backoff factor of 1.3757 instead of 2, the sus-tainable offered load can reach 0.3545—very close to the max-imum throughput. This paper will present many other intricaterelationships between system parameters and system operationand performance.
A. Related Work
Most prior investigations on the Aloha network (e.g., [2], [3],and [5]) consider the access delay (i.e., service time incurredby a packet at the head-of-line (HOL) of its queue). Less at-tention is paid to the overall queuing delay (i.e., waiting timeplus service time). In [2], the saturation throughput (reciprocalof mean access delay) as a function of the backoff factor wasderived. A fundamental expression obtained in [2] is the de-pendency of saturation throughput on for a large network:
. Higher moments of the access delay, how-ever, were not considered. The work in [3] focused on the caseof only and investigated both the mean and variance ofaccess delay. It was shown that the throughput must be below
if variance of access delay is to befinite.
In contrast to these prior investigations, a focus of our workhere is on the queuing delay, rather than the access delay, and forgeneral . For the case, bounded mean delay requires onlythe access-delay variance to be bounded. Hence, the sustainableoffered load for bounded mean queuing delay is the same as thatderived in [3] for bounded access-delay variance. For smallerthan 1.3757, however, we argue in this paper that an offeredload that ensures bounded access-delay variance cannot safelyguarantee bounded mean queuing delay and that the offered loadmust also be below the saturation throughput.
As in this paper, [6] also considered the nonsaturated sce-nario, but for 802.11 networks. Furthermore, the focus is onthroughput rather than on delay. It argued that the notion ofsaturation throughput is a pessimistic one in that the systemthroughput could be above the saturation throughput if thequeues are forced to be emptied from time to time. We find thatas far as the Aloha network is concerned, with an appropriatesetting of , one could achieve throughput that is only lessthan 4% away from the maximum throughput of . This isachieved without forced emptying of queues and with delayperformance taken into consideration.
In this paper, we consider a slightly different exponentialbackoff protocol than the prior work. Our model captures themain essence and principle of exponential backoff and has theadvantage of being more amenable to analysis. Many of thesaturation throughput results in [2] can be obtained within thespace of less than one page with our model, as will be shown inSection II-A.
We are primarily interested in networks in which the numberof nodes is large. Our large-but-fixed results are not tobe confused with the results of the infinite-population model[7], in which nodes—each with one and only one packet totransmit—are created on the fly. In the former, the number ofcontending packets is bounded by , whereas in the latter, thenumber of contending packets can grow indefinitely. As a matterof fact, the saturation throughput of binary exponential backoff
is 0.3466 in the limit of in the former, but zero in thelatter [8].
The remainder of this paper is organized as follows. Section IIpresents our system model. We illustrate the use of the model insaturation analysis. Many expressions useful for queuing-delayand starvation analyses later are derived. Section III presentsour queuing-delay analysis. We derive expressions that relatedelay performance to system parameters. The materials pre-sented in Section III show that queuing-delay analysis is muchmore subtle than the saturation-throughput analysis in Section IIand in prior work. Section IV investigates in detail the effects ofthe backoff factor on the sustainable offered load for boundedmean-delay operation. Section V is devoted to the study of thestarvation phenomenon. We derive the dependency of starvationon system parameters. Section VI concludes this paper.
II. SYSTEM MODEL AND SATURATION ANALYSIS
In this section, we first describe the system model understudy, then perform a saturation analysis.
A. System Model
Real System: We consider a slotted Aloha network withnodes. Each node has a queue to hold its backlog packets. Whena fresh packet enters the HOL of its queue, it transmits withprobability in each time slot, where . When morethan one node transmits a packet in a time slot, a collision occursand the packets are corrupted. A collided packet will be retrans-mitted in a future time slot. Each time a HOL packet suffers acollision, the transmission probability in the future is divided bythe backoff factor . Thus, a HOL packet that has suffered
prior collisions will be transmitted in a future time slot withprobability . We refer to as the backoff stage of anode. A HOL packet will be transmitted and retransmitted untilit is successfully cleared without a collision, at which point thenext-in-line packet, if any, will proceed to the HOL.
Another closely related protocol often considered is a count-down-window protocol [2], [9], in which a countdown processis used to determine when a HOL packet is transmitted. Theparameter in our protocol serves the same purpose as theinitial window size of that model in determining the ex-pected number of time slots until the first transmission of a HOLpacket. The common backoff factor serves the same purpose inboth models—i.e., for dynamic adjustment of the transmissionprobabilities of nodes according to contention intensity. For agiven , the two protocols have roughly the same behavior if
. Our model, however, is simpler to analyze. InSection II-A, for example, we show that many saturation resultssimilar to those in [2] can be obtained in a few simple stepswithin the space of less than a page.
With our model, the “local state” of a queue can be describedby a duple , where is the number of backlog packets inthe queue, including the HOL packet, and is the backoff stageof the HOL packet. The “global state” of the overall system con-sists of the aggregate local states of all queues. One can, inprinciple, construct a multidimensional Markov chain to ana-lyze the system. However, the analysis for even modest-sizeis prohibitively complex, and not much insight can be gainedfrom this brute-force analysis. Detailed and exact results, forexample, are only available for the 2-node case [4].
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LIEW et al.: BOUNDED-MEAN-DELAY THROUGHPUT AND NONSTARVATION CONDITIONS IN ALOHA NETWORK 3
Proxy System: For large , an approximation technique thathas often been used in saturation analysis is to replace the ac-tual system model with a “proxy model” (e.g., used in [2] aswell as [9] and many of its follow-up papers). This paper adoptsthe same approximations for saturation as well as nonsaturationanalyses.
The proxy system makes two approximations: 1) the proba-bility of collision experienced by a node is independent of itslocal state, and 2) as far as a local node is concerned, each ofthe other nodes transmits with a probability in a given timeslot. Certainly these approximations are only valid under large
when each local node only has a small effect on the overallsystem. Simulations of the actual system, referred to as the “realsystem” in this paper, can be used to check against the accuracyof the proxy-system analysis. This paper will show such verifi-cation results.
In this paper, for better exposition and understanding of theintricacies involved, we decompose the analysis of the proxysystem into three steps. The first step is a “global analysis”linking and : viz . The second step isa “local analysis” focusing on the local dynamic of a node as-suming a fixed . The third step is a “coupling analysis,” whichcombines the results from the first two steps to obtain in termsof system parameters , , .
B. Saturation Throughput Analysis
We now illustrate the three-step analytical technique for theproxy system by performing a saturation analysis. Besides illus-trating the three-step technique, more importantly, the reason forgoing through the motion to establish some of the saturation re-sults here is that they will be used later as part of our delay anal-ysis (Sections III and IV) and starvation analysis (Section V).
Global Analysis: Consider the overall system consisting ofthe homogenous nodes. Recall that is the probability oftransmission of an arbitrarily chosen node in the proxy system,and is the collision probability of a transmitting node. By thehomogeneity assumption of the proxy system, we have
as (1)
Define as the global transmission attempt rate andas the saturation throughput of the overall system. Then, by
definition
as (2)
The expression for the asymptotic case, ofcourse, is the well-known slotted Aloha throughput equation.The relationships in (2) govern the global dynamic of thesystem.
Local Analysis: Consider one particular node. Let be theHOL access delay of a packet. Then, by considering the succes-sive additional expected access delays incurred conditioned onthe number of collisions, we have
. At saturation, the HOL is always occupied.Hence, by Little’s Law, we have , where
is the saturation throughput of the local node. These two equa-tions give
as (3)
Coupling Analysis: We now couple the results from theglobal and local analyses. Overall, we can express any of thevariables , , , or in terms of the system parameters ,
, . In the following, we only list the expressions that willbe used later.
The dependency of on system parameters , , willbe useful for our starvation analysis later. From
in (2) andin (3), we can get
(4)
These equations in (2) and (3) also give
(5)
For , , in (2) andin (3) yield [below can also be obtained by taking
limit in (5)]
(6)
Note that while the solution for is in closed form in theasymptotic case, must be found numerically from (5) in thefinite- case. Also, depends on , , in the finite- casebut only on in the asymptotic case. The practical significanceof (5) and (6) is that they allow us to study the dependency ofthe saturation throughput on system parameters , , .
III. DELAY ANALYSIS
We now consider the nonsaturation analysis in which thequeues of the nodes are not saturated. Unless otherwise stated,henceforth by “delay” we mean “queuing delay” rather thanthe “HOL access delay.” We assume the arrival process to eachqueue is Poisson with rate , where is the offeredload to the overall system, and is thus the offered loadto a single queue.
For a nonsaturated system under equilibrium, the output rate(i.e., throughput) is equal to the input rate (i.e., offered load).Given a system with system parameters , , , we could loadit with different offered load and, therefore, obtain differentthroughput . This is in contrast to a saturated system, in whichthe saturation throughput is a “fixed” quantity given , , .
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE/ACM TRANSACTIONS ON NETWORKING
Different , however, will give rise to different delay per-formances, and it is important not to overload the system. Anissue of particular interest to us, which will be addressed by theend of this section, is the limit on that can ensure equilibriumand bounded-delay operation. We call this limit “safe boundedmean-delay throughput.” As will be shown, SBMD throughputdepends on , , and may be lower than .
As with the saturation analysis in Section II-B, we breakdown the delay analysis into global, local, and couplinganalyses. It turns out that the local and coupling analyses aremuch more involved here.
A. Global Analysis
The global analysis of throughput is largely the same as thatof the saturated system given the two approximations of theproxy system described in Section II-A. That is, (1) and (2) re-main valid with the replacements of by and by ,where is the transmission attempt rate of the overallsystem when the offered load (throughput) is . Parallel to (2),we have
as (7)
where is the transmission attempt rate of the overallsystem when the offered load is .
B. Local Analysis
The local analysis is more complicated than that in the sat-urated case since we need to consider the queuing dynamic ata node, not just the HOL contention dynamic. For Poisson ar-rival, a packet of a local queue generally arrives between theboundaries of two adjacent time slots. If it arrives to an emptyqueue, it must wait until the beginning of the next time slot be-fore it can contend for transmission. Conceptually, it does notenter the HOL until the next time slot. It turns out that thislocal queue specification fits under the M/G/1 multiple-vaca-tion queue model [10], as elaborated in the next paragraph. Theintricate part of our analysis is in deriving the service-time dis-tribution and the vacation-time distribution of the Aloha systemto substitute into the equations of the M/G/1 vacation queue.
In the multiple-vacation queue model [10], the server leavesfor a vacation when the queue becomes empty. The vacationlength is a random variable . Upon returning from a vacation,if the queue remains empty, the server immediately departs foranother vacation. When a packet arrives to an empty queue in
the Aloha network, the time until the beginning of the next timeslot is part of the vacation time taken by the server. For slottedAloha, the vacation time is fixed and equal to one slot time. Theaccess delay incurred by a packet at the HOL corresponds to theservice time of the M/G/1 vacation queue model.
For notation purposes, in the following,denotes the -transform of a discrete non-
negative random variable , anddenotes the Laplace transform of a continuous nonnegativerandom variable . The M/G/1 vacation queue has the fol-lowing solution:
(8)
where
is number of packets in the queue including the HOLpacket;
is queueing delay including the service time;
is service time of a packet;
is vacation time taken by the server when the queue isempty.
The expressions in (8) are generic expressions relating andto and . To use (8), however, we need to derive the dis-
tributions of and specific to our system. For slotted Aloha,each vacation lasts exactly one time slot, so that
(9)
Recall that an approximation in the proxy system is thatis constant and independent of the local state. We now derivein terms of . Mathematically, the Laplace transform in(8) is related to the -transform by
(10)
To derive , let be the number of collisions experiencedby a HOL packet before it is successfully transmitted. By condi-tional-probability argument, we have (11), shown at the bottomof the page. Thus,
(12)
where -transform of the time between the and transmissions
(11)
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LIEW et al.: BOUNDED-MEAN-DELAY THROUGHPUT AND NONSTARVATION CONDITIONS IN ALOHA NETWORK 5
Equations (8), (9), (10), and (12) allow us to derive momentsof in terms of , , . For the first moment , after someequation crunching, we can get (13), shown at the bottom ofthe page. We note that [11] independently obtained and
for the case. Let us next consider the implicationsof (13).
Bounded Mean-Delay Conditions: We focus on the condi-tions to ensure bounded mean delay in the following. As men-tioned above, higher moments of delay, such as delay variance,can also be obtained from (8)–(10) and (12) in principle. If de-sired, an argument similar to that below can also yield the con-ditions for bounded delay variance.
From (13), convergence of requires ,and , but the first inequality is satisfied if the
second is and can be eliminated. Thus, we have the followingconditions for bounded :
and (14)
Note that at equilibrium, the mean service time is. Applying Little’s law and the physical require-
ment that the average HOL occupancy is less than 1 when thesystem is nonsaturated, we have , which isthe same as the first inequality in (14). Thus, the first inequalityis also the condition for nonsaturation.
The analysis thus far assumes steady-state equilibrium can beachieved. For a queuing system, steady state can be achieved ifand only if (see [12]). Since
means the queue is not saturated, the first inequality of (14)is also the necessary and sufficient condition for steady-stateoperation. In other words, nonsaturated operation is the sameas steady-state operation.
The second inequality in (14) arises from the requirement tobound in (13). We note that un-bounded does not automatically imply that the system issaturated, although the converse is true. To see this, consider ahypothetical distribution of that does not decay fast enough:
, for . It is easyto see that (hence, also) is un-bounded, but the system is not saturated because .
In short, bounded requires both the system to be non-saturated [first inequality in (14)] and the variance of the servicetime to be bounded [second inequality in (14)].
C. Coupling Analysis
The coupling analysis also involves many subtleties notpresent in the saturation case. The local analysis leaves us
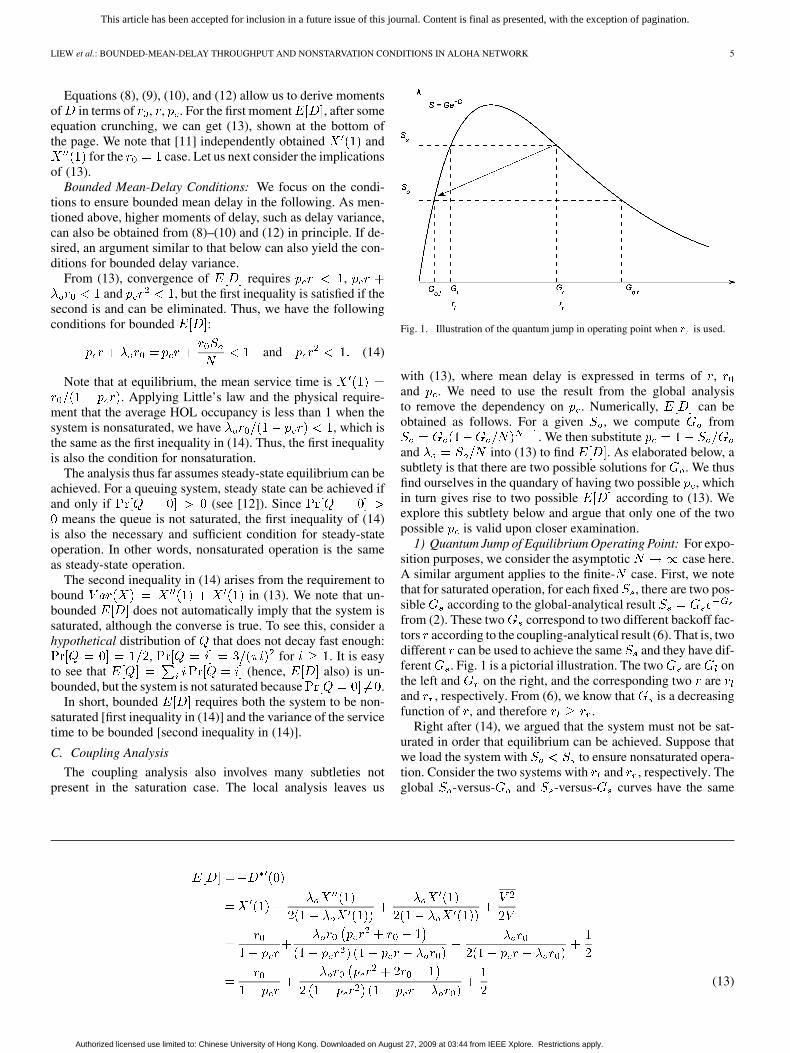
Fig. 1. Illustration of the quantum jump in operating point when � is used.
with (13), where mean delay is expressed in terms of ,and . We need to use the result from the global analysisto remove the dependency on . Numerically, can beobtained as follows. For a given , we compute from
. We then substituteand into (13) to find . As elaborated below, asubtlety is that there are two possible solutions for . We thusfind ourselves in the quandary of having two possible , whichin turn gives rise to two possible according to (13). Weexplore this subtlety below and argue that only one of the twopossible is valid upon closer examination.
1) Quantum Jump of Equilibrium Operating Point: For expo-sition purposes, we consider the asymptotic case here.A similar argument applies to the finite- case. First, we notethat for saturated operation, for each fixed , there are two pos-sible according to the global-analytical resultfrom (2). These two correspond to two different backoff fac-tors according to the coupling-analytical result (6). That is, twodifferent can be used to achieve the same and they have dif-ferent . Fig. 1 is a pictorial illustration. The two are onthe left and on the right, and the corresponding two areand , respectively. From (6), we know that is a decreasingfunction of , and therefore .
Right after (14), we argued that the system must not be sat-urated in order that equilibrium can be achieved. Suppose thatwe load the system with to ensure nonsaturated opera-tion. Consider the two systems with and , respectively. Theglobal -versus- and -versus- curves have the same
(13)
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE/ACM TRANSACTIONS ON NETWORKING
form: . So, we can overlay the saturation and non-saturation operating points on the same graph, as in Fig. 1. Asshown in Fig. 1, for the given , we could draw a hori-zontal line below to identify the corresponding . We findthat for the given , we have two possible : andwith . Which of them is the “correct” operatingpoint?
It is tempting to jump to the conclusion that in the system with, is the operating point, and in the system with , is
the operating point. After all, this gives a smooth and continuoustransition from the two operating points at saturation, and
, as is decreased slowly from . It turns out that this isnot the case. As argued below, when the system is not saturated,the operating point is for both and ; the operating point
is not tenable for either or .For the systems with and , by definition their at satu-
ration are and , respectively.From the second line of (3), at saturation. Thus, wehave and for and ,respectively.
At offered load , the at the “potential” operating pointsand are and
, respectively. If were the operating pointunder and , we would respectively have the following:
(15)
The inequalities in (15) can be seen as follows. Sinceand , we have ;
and . The inequalities in(15) imply that cannot be the operating point under
or because and violate the conditionfor nonsaturated and equilibrium operation (see (13) and theargument leading to (14) and thereafter).
By contrast, the operating point at satisfiesfor both and , as can be seen from
(16)
We therefore conclude that the correct is the smaller of thetwo possible solutions to . Note in particular thatit does not matter what is. The value of only determines thesaturation throughput . As long as we load the system withan offered load smaller than , is independent of .
In Fig. 1, note also that for , as we decrease fromto (i.e., moving from saturation operation to non-
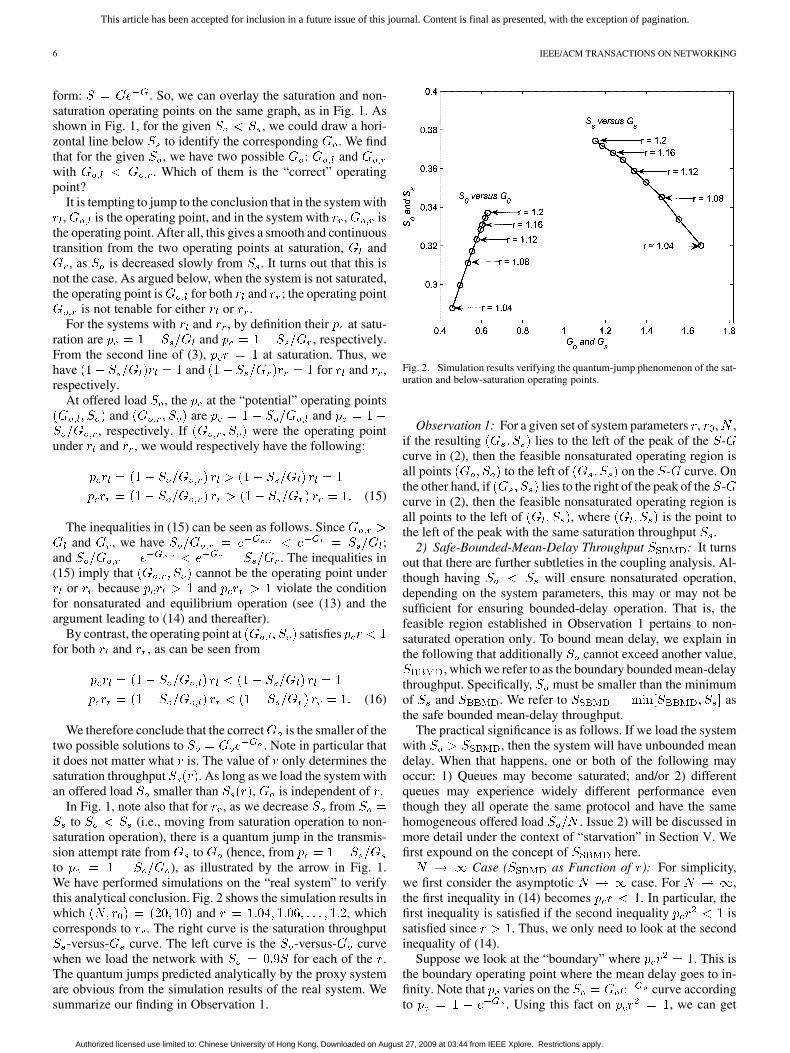
saturation operation), there is a quantum jump in the transmis-sion attempt rate from to (hence, fromto ), as illustrated by the arrow in Fig. 1.We have performed simulations on the “real system” to verifythis analytical conclusion. Fig. 2 shows the simulation results inwhich and , whichcorresponds to . The right curve is the saturation throughput
-versus- curve. The left curve is the -versus- curvewhen we load the network with for each of the .The quantum jumps predicted analytically by the proxy systemare obvious from the simulation results of the real system. Wesummarize our finding in Observation 1.
Fig. 2. Simulation results verifying the quantum-jump phenomenon of the sat-uration and below-saturation operating points.
Observation 1: For a given set of system parameters , , ,if the resulting lies to the left of the peak of the -curve in (2), then the feasible nonsaturated operating region isall points to the left of on the - curve. Onthe other hand, if lies to the right of the peak of the -curve in (2), then the feasible nonsaturated operating region isall points to the left of , where is the point tothe left of the peak with the same saturation throughput .
2) Safe-Bounded-Mean-Delay Throughput : It turnsout that there are further subtleties in the coupling analysis. Al-though having will ensure nonsaturated operation,depending on the system parameters, this may or may not besufficient for ensuring bounded-delay operation. That is, thefeasible region established in Observation 1 pertains to non-saturated operation only. To bound mean delay, we explain inthe following that additionally cannot exceed another value,
, which we refer to as the boundary bounded mean-delaythroughput. Specifically, must be smaller than the minimumof and . We refer to asthe safe bounded mean-delay throughput.
The practical significance is as follows. If we load the systemwith , then the system will have unbounded meandelay. When that happens, one or both of the following mayoccur: 1) Queues may become saturated; and/or 2) differentqueues may experience widely different performance eventhough they all operate the same protocol and have the samehomogeneous offered load . Issue 2) will be discussed inmore detail under the context of “starvation” in Section V. Wefirst expound on the concept of here.
Case ( as Function of ): For simplicity,we first consider the asymptotic case. For ,the first inequality in (14) becomes . In particular, thefirst inequality is satisfied if the second inequality issatisfied since . Thus, we only need to look at the secondinequality of (14).
Suppose we look at the “boundary” where . This isthe boundary operating point where the mean delay goes to in-finity. Note that varies on the curve accordingto . Using this fact on , we can get
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LIEW et al.: BOUNDED-MEAN-DELAY THROUGHPUT AND NONSTARVATION CONDITIONS IN ALOHA NETWORK 7
Fig. 3. Relative positions of �� �� � and �� �� � on the � ��� curve and the associated feasible regions for bounded mean-delay, non-saturated operation (darkened lines) for (a) � � �, (b) � � �����, (c) � � ���,and (d) � � �����.
. We shall refer to this quantity as theboundary bounded mean-delay throughput, denoted by
(17)
The corresponding attempt rate is
(18)
Recall that (14) is obtained from local analysis, and therefore(17) and (18) are outcomes of local analysis. The local analyticalresults (17) and (18) dictate which of the operating points on theglobal-analytical curve are feasible and whichare not for bounded mean-delay operation.
Observation 2: For a given , bounded mean delay re-quires the operating point to lie to the left of
on the curve.To see the validity of Observation 2, note that ,
and therefore increases with . Thus, for a given , in orderfor an operating point to have , it must lie tothe left of , where .
Observation 3: For a given , is always to the rightof on the curve.
To see the validity of Observation 3, note from (6) and (18)that .
To identify the feasible region for bounded mean delay andnonsaturated operation, in Fig. 3(a)–(d), we trace the move-ment of according to (17) and (18) and themovement of according to (6), as decreases. Bothpoints move to the right as decreases. The darkened lines inFig. 3(a)–(d) correspond to the feasible operating regions. Weexplain each of the four cases here.
In Fig. 3(a), both and are to theleft of the peak of the - curve, with . Accordingto Observation 2, the feasible region for bounded mean-delayoperation is to the left of , as shown in thefigure. According to Observation 1, this region is also within the
nonsaturated operating region. Overall, bounded mean-delayand nonsaturated operation can be ensured by limiting theoffered load . For between and , thesystem is nonsaturated but the mean delay is unbounded.
As decreases, we have the situation in Fig. 3(b), whereis to the left and is to the right of
the peak of the - curve, with . Again, withthe same argument as for Fig. 3(a), nonsaturation and boundedmean delay can be ensured by limiting . Also, for
between and , the system is nonsaturated, but themean delay is unbounded.
As decreases further, we have the situation in Fig. 3(c),where is to the left and is to theright of the peak, but . Decreasing even fur-ther leads us to Fig. 3(d), where both and
are to the right of the peak, with . Forboth of these cases, limiting will ensure nonsaturationand bounded mean delay.
For the two cases in Fig. 3(c) and (d), it may appear at firstglance that we could load the system with and even
while ensuring bounded mean-delay operation.To see this argument, suppose that we have an as shown inFig. 3(d). According to the argument immediately below Ob-servation 2, at this , , satisfying the boundedmean-delay condition. In the following, we argue that it is infact not “safe” to load the system with .
When , there is the danger of the system running intosaturation, at which point will go to infinity because thesaturation throughput cannot keep up with the input rate .That is, the equilibrium of the system as assumed in our localanalysis in Section III-C does not apply anymore. In a simula-tion experiment, for a situation such as that depicted in Fig. 3(d),we intentionally caused the system to go into saturation with asudden increase in the offered load and then decreased the of-fered load back to the shown in the figure. The simulationresults show that becomes unbounded thereafter. In otherwords, such a , which is larger than , is not a “safe” offeredload, and it is obtained with an a priori assumption of equilib-rium and nonsaturation. If the system is already in saturation,
is unbounded for such a and cannot recover. On theother hand, in the simulation experiment, if we decreased theoffered load further to below , then the system did clear upand became bounded. Indeed, what we observed was the“quantum-jump” phenomenon discussed in Section III-C1 ascrosses . Thus, is safe.
Combining the descriptions of all four cases above, we arriveat Observation 4.
Observation 4: The feasible region for in terms ofbounded mean-delay and nonsaturated operation is the intersec-tion of the two feasible regions in Observations 1 and 2.
We define the SBMD throughput as follows to correspond toObservation 4:
(19)
Finite- Case ( as Function of , , ): We nowconsider the finite- case. The mechanic of the argument is
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE/ACM TRANSACTIONS ON NETWORKING
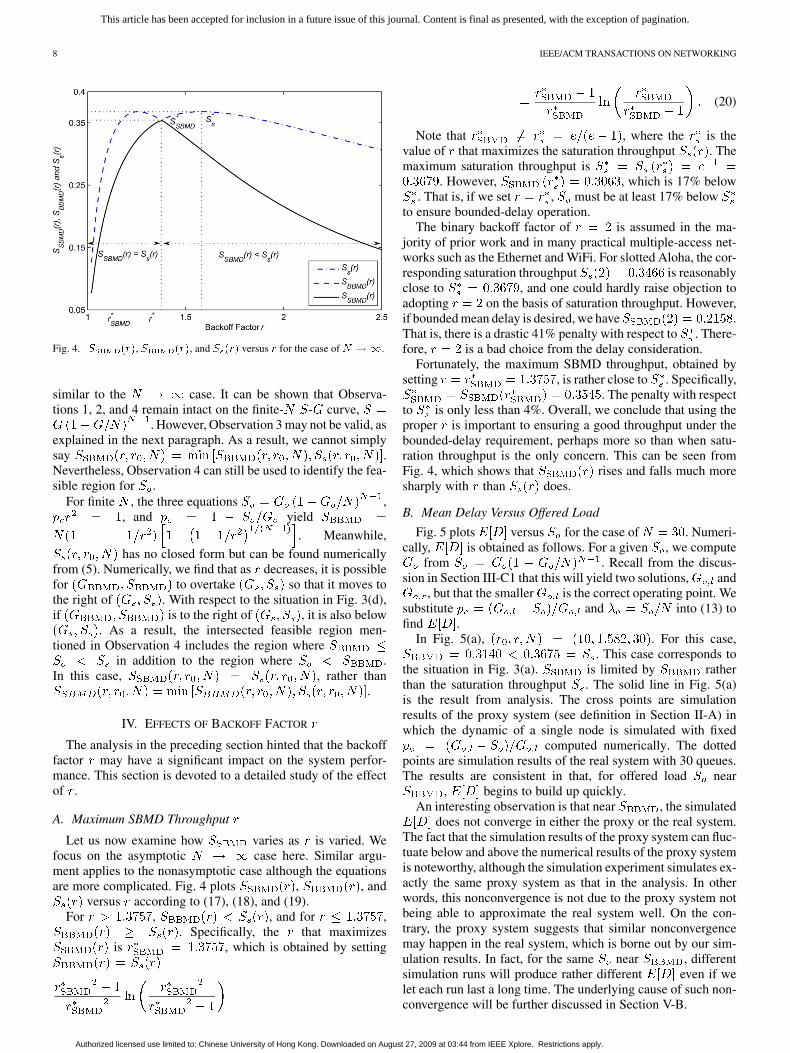
Fig. 4. � ���, � ���, and � ��� versus � for the case of � ��.
similar to the case. It can be shown that Observa-tions 1, 2, and 4 remain intact on the finite- - curve,
. However, Observation 3 may not be valid, asexplained in the next paragraph. As a result, we cannot simplysay .Nevertheless, Observation 4 can still be used to identify the fea-sible region for .
For finite , the three equations ,, and yield
. Meanwhile,
has no closed form but can be found numericallyfrom (5). Numerically, we find that as decreases, it is possiblefor to overtake so that it moves tothe right of . With respect to the situation in Fig. 3(d),if is to the right of , it is also below
. As a result, the intersected feasible region men-tioned in Observation 4 includes the region where
in addition to the region where .In this case, , rather than
.
IV. EFFECTS OF BACKOFF FACTOR
The analysis in the preceding section hinted that the backofffactor may have a significant impact on the system perfor-mance. This section is devoted to a detailed study of the effectof .
A. Maximum SBMD Throughput
Let us now examine how varies as is varied. Wefocus on the asymptotic case here. Similar argu-ment applies to the nonasymptotic case although the equationsare more complicated. Fig. 4 plots , , and
versus according to (17), (18), and (19).For , , and for ,
. Specifically, the that maximizesis , which is obtained by setting
(20)
Note that , where the is thevalue of that maximizes the saturation throughput . Themaximum saturation throughput is
. However, , which is 17% below. That is, if we set , must be at least 17% below
to ensure bounded-delay operation.The binary backoff factor of is assumed in the ma-
jority of prior work and in many practical multiple-access net-works such as the Ethernet and WiFi. For slotted Aloha, the cor-responding saturation throughput is reasonablyclose to , and one could hardly raise objection toadopting on the basis of saturation throughput. However,if bounded mean delay is desired, we have .That is, there is a drastic 41% penalty with respect to . There-fore, is a bad choice from the delay consideration.
Fortunately, the maximum SBMD throughput, obtained bysetting , is rather close to . Specifically,
. The penalty with respectto is only less than 4%. Overall, we conclude that using theproper is important to ensuring a good throughput under thebounded-delay requirement, perhaps more so than when satu-ration throughput is the only concern. This can be seen fromFig. 4, which shows that rises and falls much moresharply with than does.
B. Mean Delay Versus Offered Load
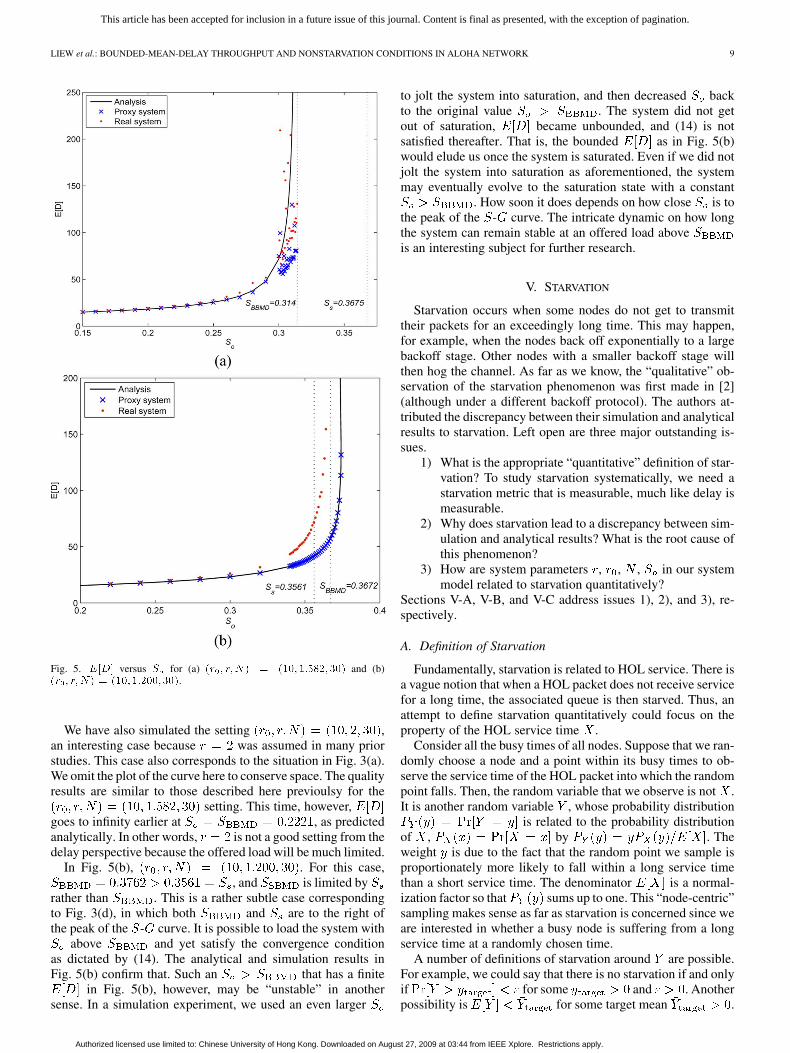
Fig. 5 plots versus for the case of . Numeri-cally, is obtained as follows. For a given , we compute
from . Recall from the discus-sion in Section III-C1 that this will yield two solutions, and
, but that the smaller is the correct operating point. Wesubstitute and into (13) tofind .
In Fig. 5(a), . For this case,. This case corresponds to
the situation in Fig. 3(a). is limited by ratherthan the saturation throughput . The solid line in Fig. 5(a)is the result from analysis. The cross points are simulationresults of the proxy system (see definition in Section II-A) inwhich the dynamic of a single node is simulated with fixed
computed numerically. The dottedpoints are simulation results of the real system with 30 queues.The results are consistent in that, for offered load near
, begins to build up quickly.An interesting observation is that near , the simulated
does not converge in either the proxy or the real system.The fact that the simulation results of the proxy system can fluc-tuate below and above the numerical results of the proxy systemis noteworthy, although the simulation experiment simulates ex-actly the same proxy system as that in the analysis. In otherwords, this nonconvergence is not due to the proxy system notbeing able to approximate the real system well. On the con-trary, the proxy system suggests that similar nonconvergencemay happen in the real system, which is borne out by our sim-ulation results. In fact, for the same near , differentsimulation runs will produce rather different even if welet each run last a long time. The underlying cause of such non-convergence will be further discussed in Section V-B.
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LIEW et al.: BOUNDED-MEAN-DELAY THROUGHPUT AND NONSTARVATION CONDITIONS IN ALOHA NETWORK 9
Fig. 5. ���� versus � for (a) �� � ���� � ����������� and (b)�� � �� �� � ������������.
We have also simulated the setting ,an interesting case because was assumed in many priorstudies. This case also corresponds to the situation in Fig. 3(a).We omit the plot of the curve here to conserve space. The qualityresults are similar to those described here previoulsy for the
setting. This time, however,goes to infinity earlier at , as predictedanalytically. In other words, is not a good setting from thedelay perspective because the offered load will be much limited.
In Fig. 5(b), . For this case,, and is limited by
rather than . This is a rather subtle case correspondingto Fig. 3(d), in which both and are to the right ofthe peak of the - curve. It is possible to load the system with
above and yet satisfy the convergence conditionas dictated by (14). The analytical and simulation results inFig. 5(b) confirm that. Such an that has a finite
in Fig. 5(b), however, may be “unstable” in anothersense. In a simulation experiment, we used an even larger
to jolt the system into saturation, and then decreased backto the original value . The system did not getout of saturation, became unbounded, and (14) is notsatisfied thereafter. That is, the bounded as in Fig. 5(b)would elude us once the system is saturated. Even if we did notjolt the system into saturation as aforementioned, the systemmay eventually evolve to the saturation state with a constant
. How soon it does depends on how close is tothe peak of the - curve. The intricate dynamic on how longthe system can remain stable at an offered load aboveis an interesting subject for further research.
V. STARVATION
Starvation occurs when some nodes do not get to transmittheir packets for an exceedingly long time. This may happen,for example, when the nodes back off exponentially to a largebackoff stage. Other nodes with a smaller backoff stage willthen hog the channel. As far as we know, the “qualitative” ob-servation of the starvation phenomenon was first made in [2](although under a different backoff protocol). The authors at-tributed the discrepancy between their simulation and analyticalresults to starvation. Left open are three major outstanding is-sues.
1) What is the appropriate “quantitative” definition of star-vation? To study starvation systematically, we need astarvation metric that is measurable, much like delay ismeasurable.
2) Why does starvation lead to a discrepancy between sim-ulation and analytical results? What is the root cause ofthis phenomenon?
3) How are system parameters , , , in our systemmodel related to starvation quantitatively?
Sections V-A, V-B, and V-C address issues 1), 2), and 3), re-spectively.
A. Definition of Starvation
Fundamentally, starvation is related to HOL service. There isa vague notion that when a HOL packet does not receive servicefor a long time, the associated queue is then starved. Thus, anattempt to define starvation quantitatively could focus on theproperty of the HOL service time .
Consider all the busy times of all nodes. Suppose that we ran-domly choose a node and a point within its busy times to ob-serve the service time of the HOL packet into which the randompoint falls. Then, the random variable that we observe is not .It is another random variable , whose probability distribution
is related to the probability distributionof , by . Theweight is due to the fact that the random point we sample isproportionately more likely to fall within a long service timethan a short service time. The denominator is a normal-ization factor so that sums up to one. This “node-centric”sampling makes sense as far as starvation is concerned since weare interested in whether a busy node is suffering from a longservice time at a randomly chosen time.
A number of definitions of starvation around are possible.For example, we could say that there is no starvation if and onlyif for some and . Anotherpossibility is for some target mean .
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10 IEEE/ACM TRANSACTIONS ON NETWORKING
For the rest of this paper, we adopt the simple definition thatrequires to be finite.
Definition of Nonstarvation: A system is nonstarved if andonly if (hence, ) is finite.
That is finite does not mean it is small. The implicit un-derstanding behind this definition is that for whatever conditionwe come up with that can meet the finite requirement, weneed to use a condition that is somewhat tighter in actual imple-mentation. This is analogous to the definition of , wherewe need to make smaller than by a sufficient marginif we want to meet certain targeted mean delay (i.e., we cannotsimply set ).
With this definition, we can now relate the condition for non-starvation to the condition for bounded mean delay in a non-saturated system. Mathematically, it can be easily shown from
that is bounded if and only ifis bounded. According to (13), if is not bounded,
then is also not bounded. The practical significance andinterpretation is as follows. When is large, not only willthe delay performance be bad, but the performance among dif-ferent nodes may also vary widely because some are starvedwhile others are not.
Our definition of starvation allows us to unite the notions ofnonstarved operation and bounded mean-delay operation sincea root cause giving rise to both of them is the same: large .
B. Starvation and Nonconvergence of Simulations
This section explores why nonconvergence of simulation re-sults happens to occur whenever the system is starved, a phe-nomenon observed in [2] as well as in our simulation experi-ments. Underlying this phenomenon is a fundamental cause: theimmeasurability of performance when starvation occurs, as ex-plained in the following.
Saturated Case: Starvation can occur in a saturated or non-saturated system. We first focus on the saturated case. Supposewe want to measure the average service time at saturation(note: by Little’s law). In the following, we arguethat, for a starved system, cannot be estimated accurately.For our measurement, imagine that we perform experiments,
. Each experiment is conducted overa long time so that we could gather the HOL service times of
packets of a particular queue. For each trace , we cancompute the average service time as
(21)
where is sample of trace . From the large set of exper-iments, we have samples of from (21). From the samples,we can then construct the probability density of , . Letus make very large for each of the experiments. We wish thatthe Law of Large Numbers would then apply, and the spread ofthis density would then become very narrow. If so, we could es-timate accurately by defining for any since
for different converges. If not, we really do not know whichis to be believed, and a definitive measure of would
elude us. Note the caveat that if does not converge as in-
creases, alternatively defined asdoes not converge either since this is equivalent to increasingthe sample size , which does not help.
We show in the following that if the system is starved andis unbounded, then is unbounded. Hence,
does not “narrow” with large . The expectation in (22) is theensemble average over a large number of experiments.
(22)
Thus, is unbounded if is unbounded. Of course,in experiments, our measurement is time-limited by the durationof our experiment, and we will not observe to be infinite.Nevertheless, the above points out that it is likely that willnot converge in experiments.
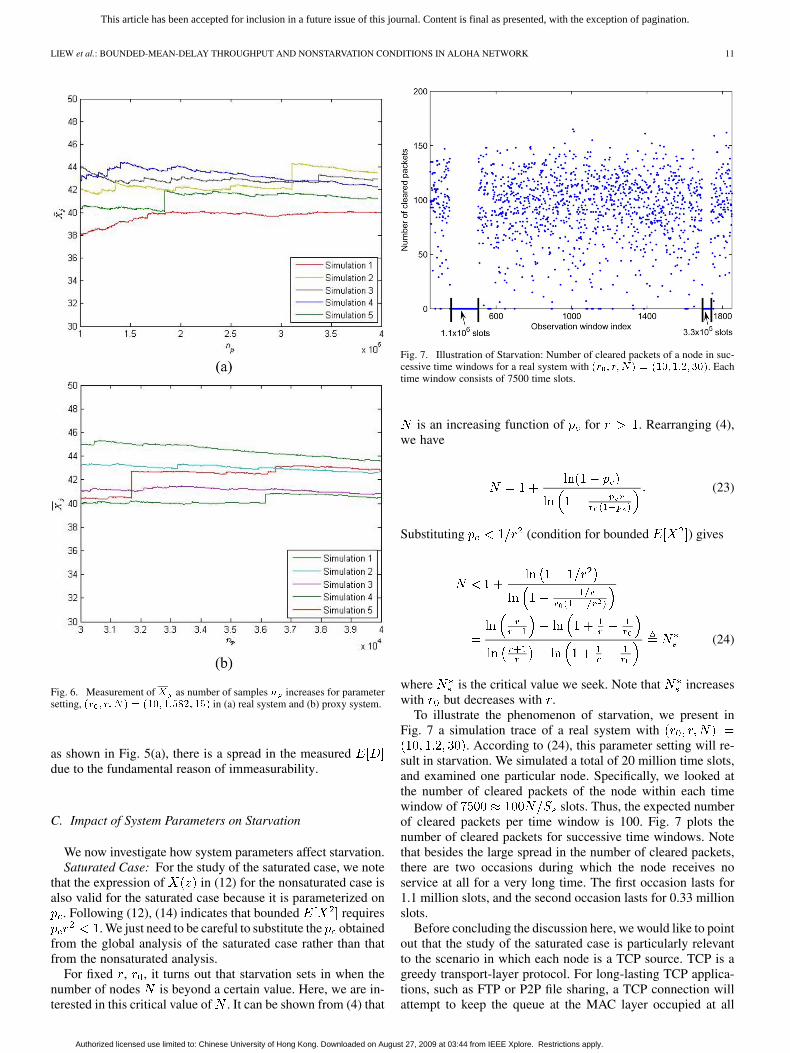
Fig. 6 presents our experimental results. We set, a starved case where is unbounded.
Fig. 6(a) and (b) are the results of the real system and proxysystem, respectively. The number of experiments in each setis . For each trace, of one queue is measured as afunction of , as per (21). Specifically, as each packet departsfrom the queue, increases by one, and is recomputed totake the statistic of this packet into account. For the experimentsof the proxy system, we first compute the as a function of
, , from (4), and then use this to simulate the Markovchain associated with a queue.
In both the real and proxy systems, there is a spread ofacross the experiments, and they do not converge to
a common value as increases. In contrast, for the case of, a nonstarved case, converges
to a common value as increases (The results of this set ofexperiments are not shown here to conserve space). A pointworth emphasizing is that such nonconvergence is not related tothe proxy system not accurately approximating the dynamic inthe real system since nonconvergence occurs in both systems.
Since does not converge, neither does the averagethroughput of the queue (if we measure average throughput of aqueue as ). Indeed, in our experiments,we observe the throughputs of different queues are quite dif-ferent even if we average the throughputs over a long stretch oftime. Unfairness tends to persist.
In summary, the phenomena of starvation and nonconver-gence of measured performance results are intricately tied, andthey have the same root cause: unbounded .
Nonsaturated Case: The above has focused on the saturatedcase. Nonconvergence also occurs in the nonsaturated case.In the nonsaturated case, the offered load is a factor as towhether starvation occurs.
Besides the nonconvergence of measured , which oc-curs when is unbounded, the measured may notconverge either. For the same reason that does notallow converged measurement of , does notallow converged measurement of either. It can be shownfrom in (8) that goes to infinity before does(omitted here to conserve space). This is borne out by Fig. 5(a),in which the measured begins to diverge before reaches
. Again, the nonconvergence of the measured hasnothing to do with the inaccuracy of the proxy system with re-spect to the real system. Even for the proxy-system simulation,
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LIEW et al.: BOUNDED-MEAN-DELAY THROUGHPUT AND NONSTARVATION CONDITIONS IN ALOHA NETWORK 11
Fig. 6. Measurement of � as number of samples � increases for parametersetting, �� � �� �� � ������������� in (a) real system and (b) proxy system.
as shown in Fig. 5(a), there is a spread in the measureddue to the fundamental reason of immeasurability.
C. Impact of System Parameters on Starvation
We now investigate how system parameters affect starvation.Saturated Case: For the study of the saturated case, we note
that the expression of in (12) for the nonsaturated case isalso valid for the saturated case because it is parameterized on
. Following (12), (14) indicates that bounded requires. We just need to be careful to substitute the obtained
from the global analysis of the saturated case rather than thatfrom the nonsaturated analysis.
For fixed , , it turns out that starvation sets in when thenumber of nodes is beyond a certain value. Here, we are in-terested in this critical value of . It can be shown from (4) that
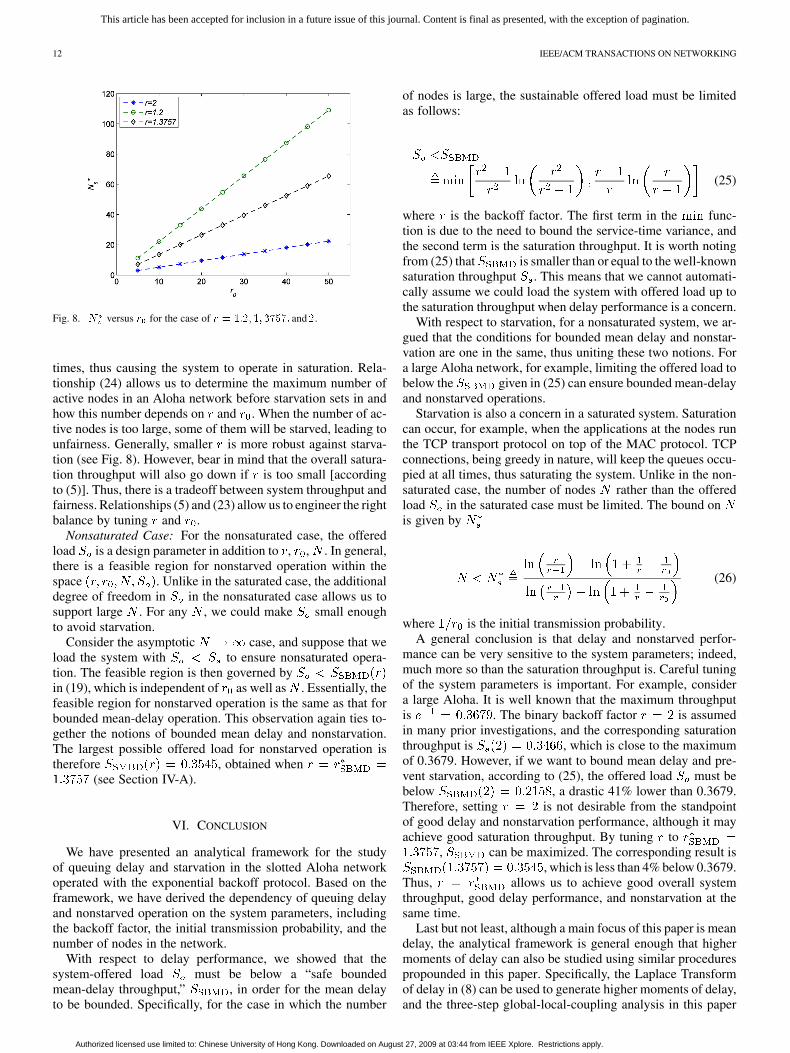
Fig. 7. Illustration of Starvation: Number of cleared packets of a node in suc-cessive time windows for a real system with �� � �� �� � ����������. Eachtime window consists of 7500 time slots.
is an increasing function of for . Rearranging (4),we have
(23)
Substituting (condition for bounded ) gives
(24)
where is the critical value we seek. Note that increaseswith but decreases with .
To illustrate the phenomenon of starvation, we present inFig. 7 a simulation trace of a real system with
. According to (24), this parameter setting will re-sult in starvation. We simulated a total of 20 million time slots,and examined one particular node. Specifically, we looked atthe number of cleared packets of the node within each timewindow of slots. Thus, the expected numberof cleared packets per time window is 100. Fig. 7 plots thenumber of cleared packets for successive time windows. Notethat besides the large spread in the number of cleared packets,there are two occasions during which the node receives noservice at all for a very long time. The first occasion lasts for1.1 million slots, and the second occasion lasts for 0.33 millionslots.
Before concluding the discussion here, we would like to pointout that the study of the saturated case is particularly relevantto the scenario in which each node is a TCP source. TCP is agreedy transport-layer protocol. For long-lasting TCP applica-tions, such as FTP or P2P file sharing, a TCP connection willattempt to keep the queue at the MAC layer occupied at all
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
12 IEEE/ACM TRANSACTIONS ON NETWORKING
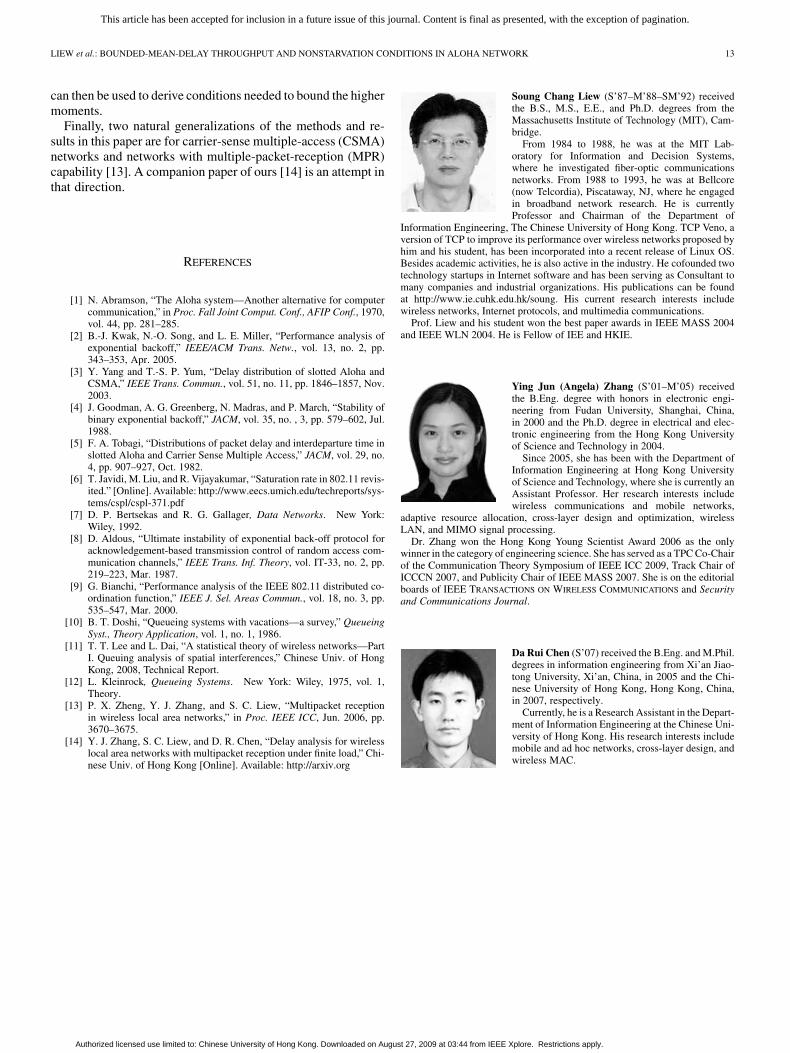
Fig. 8. � versus � for the case of � � ���� ������� and �.
times, thus causing the system to operate in saturation. Rela-tionship (24) allows us to determine the maximum number ofactive nodes in an Aloha network before starvation sets in andhow this number depends on and . When the number of ac-tive nodes is too large, some of them will be starved, leading tounfairness. Generally, smaller is more robust against starva-tion (see Fig. 8). However, bear in mind that the overall satura-tion throughput will also go down if is too small [accordingto (5)]. Thus, there is a tradeoff between system throughput andfairness. Relationships (5) and (23) allow us to engineer the rightbalance by tuning and .
Nonsaturated Case: For the nonsaturated case, the offeredload is a design parameter in addition to , , . In general,there is a feasible region for nonstarved operation within thespace . Unlike in the saturated case, the additionaldegree of freedom in in the nonsaturated case allows us tosupport large . For any , we could make small enoughto avoid starvation.
Consider the asymptotic case, and suppose that weload the system with to ensure nonsaturated opera-tion. The feasible region is then governed byin (19), which is independent of as well as . Essentially, thefeasible region for nonstarved operation is the same as that forbounded mean-delay operation. This observation again ties to-gether the notions of bounded mean delay and nonstarvation.The largest possible offered load for nonstarved operation istherefore , obtained when
(see Section IV-A).
VI. CONCLUSION
We have presented an analytical framework for the studyof queuing delay and starvation in the slotted Aloha networkoperated with the exponential backoff protocol. Based on theframework, we have derived the dependency of queuing delayand nonstarved operation on the system parameters, includingthe backoff factor, the initial transmission probability, and thenumber of nodes in the network.
With respect to delay performance, we showed that thesystem-offered load must be below a “safe boundedmean-delay throughput,” , in order for the mean delayto be bounded. Specifically, for the case in which the number
of nodes is large, the sustainable offered load must be limitedas follows:
(25)
where is the backoff factor. The first term in the func-tion is due to the need to bound the service-time variance, andthe second term is the saturation throughput. It is worth notingfrom (25) that is smaller than or equal to the well-knownsaturation throughput . This means that we cannot automati-cally assume we could load the system with offered load up tothe saturation throughput when delay performance is a concern.
With respect to starvation, for a nonsaturated system, we ar-gued that the conditions for bounded mean delay and nonstar-vation are one in the same, thus uniting these two notions. Fora large Aloha network, for example, limiting the offered load tobelow the given in (25) can ensure bounded mean-delayand nonstarved operations.
Starvation is also a concern in a saturated system. Saturationcan occur, for example, when the applications at the nodes runthe TCP transport protocol on top of the MAC protocol. TCPconnections, being greedy in nature, will keep the queues occu-pied at all times, thus saturating the system. Unlike in the non-saturated case, the number of nodes rather than the offeredload in the saturated case must be limited. The bound onis given by
(26)
where is the initial transmission probability.A general conclusion is that delay and nonstarved perfor-
mance can be very sensitive to the system parameters; indeed,much more so than the saturation throughput is. Careful tuningof the system parameters is important. For example, considera large Aloha. It is well known that the maximum throughputis . The binary backoff factor is assumedin many prior investigations, and the corresponding saturationthroughput is , which is close to the maximumof 0.3679. However, if we want to bound mean delay and pre-vent starvation, according to (25), the offered load must bebelow , a drastic 41% lower than 0.3679.Therefore, setting is not desirable from the standpointof good delay and nonstarvation performance, although it mayachieve good saturation throughput. By tuning to
, can be maximized. The corresponding result is, which is less than 4% below 0.3679.
Thus, allows us to achieve good overall systemthroughput, good delay performance, and nonstarvation at thesame time.
Last but not least, although a main focus of this paper is meandelay, the analytical framework is general enough that highermoments of delay can also be studied using similar procedurespropounded in this paper. Specifically, the Laplace Transformof delay in (8) can be used to generate higher moments of delay,and the three-step global-local-coupling analysis in this paper
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LIEW et al.: BOUNDED-MEAN-DELAY THROUGHPUT AND NONSTARVATION CONDITIONS IN ALOHA NETWORK 13
can then be used to derive conditions needed to bound the highermoments.
Finally, two natural generalizations of the methods and re-sults in this paper are for carrier-sense multiple-access (CSMA)networks and networks with multiple-packet-reception (MPR)capability [13]. A companion paper of ours [14] is an attempt inthat direction.
REFERENCES
[1] N. Abramson, “The Aloha system—Another alternative for computercommunication,” in Proc. Fall Joint Comput. Conf., AFIP Conf., 1970,vol. 44, pp. 281–285.
[2] B.-J. Kwak, N.-O. Song, and L. E. Miller, “Performance analysis ofexponential backoff,” IEEE/ACM Trans. Netw., vol. 13, no. 2, pp.343–353, Apr. 2005.
[3] Y. Yang and T.-S. P. Yum, “Delay distribution of slotted Aloha andCSMA,” IEEE Trans. Commun., vol. 51, no. 11, pp. 1846–1857, Nov.2003.
[4] J. Goodman, A. G. Greenberg, N. Madras, and P. March, “Stability ofbinary exponential backoff,” JACM, vol. 35, no. , 3, pp. 579–602, Jul.1988.
[5] F. A. Tobagi, “Distributions of packet delay and interdeparture time inslotted Aloha and Carrier Sense Multiple Access,” JACM, vol. 29, no.4, pp. 907–927, Oct. 1982.
[6] T. Javidi, M. Liu, and R. Vijayakumar, “Saturation rate in 802.11 revis-ited.” [Online]. Available: http://www.eecs.umich.edu/techreports/sys-tems/cspl/cspl-371.pdf
[7] D. P. Bertsekas and R. G. Gallager, Data Networks. New York:Wiley, 1992.
[8] D. Aldous, “Ultimate instability of exponential back-off protocol foracknowledgement-based transmission control of random access com-munication channels,” IEEE Trans. Inf. Theory, vol. IT-33, no. 2, pp.219–223, Mar. 1987.
[9] G. Bianchi, “Performance analysis of the IEEE 802.11 distributed co-ordination function,” IEEE J. Sel. Areas Commun., vol. 18, no. 3, pp.535–547, Mar. 2000.
[10] B. T. Doshi, “Queueing systems with vacations—a survey,” QueueingSyst., Theory Application, vol. 1, no. 1, 1986.
[11] T. T. Lee and L. Dai, “A statistical theory of wireless networks—PartI. Queuing analysis of spatial interferences,” Chinese Univ. of HongKong, 2008, Technical Report.
[12] L. Kleinrock, Queueing Systems. New York: Wiley, 1975, vol. 1,Theory.
[13] P. X. Zheng, Y. J. Zhang, and S. C. Liew, “Multipacket receptionin wireless local area networks,” in Proc. IEEE ICC, Jun. 2006, pp.3670–3675.
[14] Y. J. Zhang, S. C. Liew, and D. R. Chen, “Delay analysis for wirelesslocal area networks with multipacket reception under finite load,” Chi-nese Univ. of Hong Kong [Online]. Available: http://arxiv.org
Soung Chang Liew (S’87–M’88–SM’92) receivedthe B.S., M.S., E.E., and Ph.D. degrees from theMassachusetts Institute of Technology (MIT), Cam-bridge.
From 1984 to 1988, he was at the MIT Lab-oratory for Information and Decision Systems,where he investigated fiber-optic communicationsnetworks. From 1988 to 1993, he was at Bellcore(now Telcordia), Piscataway, NJ, where he engagedin broadband network research. He is currentlyProfessor and Chairman of the Department of
Information Engineering, The Chinese University of Hong Kong. TCP Veno, aversion of TCP to improve its performance over wireless networks proposed byhim and his student, has been incorporated into a recent release of Linux OS.Besides academic activities, he is also active in the industry. He cofounded twotechnology startups in Internet software and has been serving as Consultant tomany companies and industrial organizations. His publications can be foundat http://www.ie.cuhk.edu.hk/soung. His current research interests includewireless networks, Internet protocols, and multimedia communications.
Prof. Liew and his student won the best paper awards in IEEE MASS 2004and IEEE WLN 2004. He is Fellow of IEE and HKIE.
Ying Jun (Angela) Zhang (S’01–M’05) receivedthe B.Eng. degree with honors in electronic engi-neering from Fudan University, Shanghai, China,in 2000 and the Ph.D. degree in electrical and elec-tronic engineering from the Hong Kong Universityof Science and Technology in 2004.
Since 2005, she has been with the Department ofInformation Engineering at Hong Kong Universityof Science and Technology, where she is currently anAssistant Professor. Her research interests includewireless communications and mobile networks,
adaptive resource allocation, cross-layer design and optimization, wirelessLAN, and MIMO signal processing.
Dr. Zhang won the Hong Kong Young Scientist Award 2006 as the onlywinner in the category of engineering science. She has served as a TPC Co-Chairof the Communication Theory Symposium of IEEE ICC 2009, Track Chair ofICCCN 2007, and Publicity Chair of IEEE MASS 2007. She is on the editorialboards of IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS and Securityand Communications Journal.
Da Rui Chen (S’07) received the B.Eng. and M.Phil.degrees in information engineering from Xi’an Jiao-tong University, Xi’an, China, in 2005 and the Chi-nese University of Hong Kong, Hong Kong, China,in 2007, respectively.
Currently, he is a Research Assistant in the Depart-ment of Information Engineering at the Chinese Uni-versity of Hong Kong. His research interests includemobile and ad hoc networks, cross-layer design, andwireless MAC.
Authorized licensed use limited to: Chinese University of Hong Kong. Downloaded on August 27, 2009 at 03:44 from IEEE Xplore. Restrictions apply.





























