Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 1
Two-Timescale Stochastic Dispatchof Power Distribution Networks
Luis M. Lopez-Ramos, Student Member, IEEE, Vassilis Kekatos, Member, IEEE,Antonio G. Marques, Senior Member, IEEE, and Georgios B. Giannakis, Fellow, IEEE
Abstract—Smart distribution grids should optimally integratestochastic renewable resources while effecting voltage regulation.Since some decisions have to be designed in advance, energymanagement is a multistage problem. For early stages, finding theoptimal energy procurement accounting for the variability duringreal-time operation is a challenging task. The joint dispatchof slow- and fast-timescale controls in a distribution grid isconsidered here. The substation voltage, the energy exchangedwith a main grid, and the generation schedules for small dieselgenerators have to be decided on a slow timescale; whereasoptimal photovoltaic inverter setpoints are found on a morefrequent basis. While inverter and looser voltage regulationlimits are imposed at all times, tighter bus voltage constraintsare enforced on the average or in probability, thus enablingmore efficient renewable integration. Upon reformulating thetwo-stage grid dispatch as a stochastic convex-concave problem,two distribution-free schemes are put forth. An average dispatchalgorithm converges provably to the optimal two-stage decisionsvia a sequence of convex quadratic programs. Its non-convexprobabilistic alternative entails solving two slightly different con-vex problems and is numerically shown to converge. Numericaltests on a real-world distribution feeder verify that both novelschemes yield lower costs over competing alternatives.
Index Terms—Multistage economic dispatch, voltage regula-tion, stochastic approximation, convex-concave problem.
I. INTRODUCTION
With increasing renewable generation, energy managementof power distribution grids is becoming a computationallychallenging task. Solar energy from photovoltaic (PV) unitscan change significantly over one-minute intervals. The powerinverters found in PV units can be commanded to curtailactive power generation or adjust their power factor withinseconds [1], [2]. At a slower timescale, distribution gridoperators exchange energy with the main grid hourly or ona 10-minute basis, and may experience cost penalties upondeviating from energy market schedules [3]. Moreover, voltageregulation equipment and small diesel generators potentiallyinstalled in microgrids respond at the same slower timescale.This mode of operation calls for multistage dispatch solutions.
Spurred by demand-response programs and the use of PVinverters to accomplish various grid tasks [4], single-stage
This work was supported by the Spanish Ministry of Education FPU GrantAP2010-1050; CAM Grant S2013/ICE-2933; MINECO Grant TEC2013-41604-R; and NSF grants 1423316, 1442686, 1508993, and 1509040. L.-M.Lopez-Ramos and Antonio G. Marques are with the Dept. of Signal Theoryand Communications, King Juan Carlos Univ., Fuenlabrada, Madrid 28943,Spain. V. Kekatos is with the ECE Dept., Virginia Tech, Blacksburg, VA24061, USA. G. B. Giannakis is with the Digital Technology Center and theECE Dept., University of Minnesota, Minneapolis, MN 55455, USA. Emails:[email protected], [email protected], [email protected],[email protected].
dispatch schemes for distribution grids have been an activearea of research. Power inverters can be controlled usinglocalized rules for voltage regulation, see e.g., [5], [6], [7],[8]. Assuming two-way communication between buses andthe utility operator, dispatching a distribution system can beposed as an optimal power flow (OPF) problem. Centralizedschemes use nonlinear program solvers [9]; or rely on convexrelaxations of the full ac model of balanced [10], [11], orunbalanced grids [12]. Distributed solvers with reduced com-putational complexity have been devised in [13], [14], [15].
Nevertheless, the efficient and secure operation of dis-tribution grids involves decisions at different timescales. Adynamic programming approach for a two-stage dispatch issuggested in [16]: The taps of voltage regulators are set ona slow timescale and remain fixed for consecutive shortertime slots over which elastic loads are dispatched; yet theflexibility of loads is assumed known a priori. Alternatively,centrally computed OPF decisions can be communicated tobuses at a slow timescale, while on a faster timescale, PVpower electronics are adjusted to optimally track variationsin renewable generation and demand [17], [18], [19]. Relyingon approximate grid models, the latter schemes yield a fullylocalized real-time implementation. However, they presumesmooth system transitions and dispatch slow-responding unitsfor a single deterministic fast-timescale scenario.
Multistage dispatching under uncertainty is routinely usedin transmission systems and microgrids [20]. Robust ap-proaches find optimal slow-timescale decisions for the worst-case fast-timescale outcome; see [21] and references therein.To avoid the conservativeness of robust schemes, probabilisticapproaches postulate a probability density function (pdf) fordemand, wind generation, and system contingencies to findday-ahead grid schedules [22], [23]. The risk-limiting dispatchframework adjusts multistage decisions as the variance ofthe random variables involved decreases while approachingactual time [3]. Decisions can be efficiently calculated uponignoring network limitations and only for convenient pdfs [24].The same holds true for a network-constrained risk-limitingdispatch under additional transmission congestion assump-tions [25]. As a third alternative, stochastic sample approxima-tion approaches yield optimal slow-timescale decisions usingsamples drawn from the postulated pdf; see e.g., [26], [27].
Returning to distribution grids, PV inverters could beoverloaded sporadically in space and time to accommodatesolar fluctuations and prevent overvoltages [28]. Nonetheless,ensuring that overloading occurs sparingly couples decisionsacross time. The single-stage scheme of [29] finds optimal

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 2
PV setpoints while limiting time averages of overloadedquantities. The latter approach has been also adopted in [30]for dispatching a transmission system under a day-ahead/real-time market setup under load shedding.
Jointly dispatching slow- and fast-timescale distributiongrid resources under average or probabilistic constraints overfast-timescale decisions is considered here. Our contributionsare three-fold. First, using an approximate grid model, theexpected cost over a slow control period is minimized whileinverter and looser bus voltage constraints are satisfied at allfast-timescale slots. Further, tighter voltage limits are enforcedeither on the average or in probability across successive fast-timescale slots (see Section II). Two-stage grid dispatch isformulated as a convex-concave optimization (see Section III).Second, adopting a stochastic saddle-point approximationscheme from [31], the provably convergent algorithm ofSection IV finds the optimal slow-timescale decisions in thecase of average constraints. Third, for the case of non-convexprobabilistic constraints, an algorithm solving two similarconvex problems for each fast-timescale period is put forthin Section V. Albeit the related expected recourse functionenjoys zero-duality gap [32], the overall two-stage dispatch isnot convex-concave; and the algorithm’s performance is onlynumerically validated. Both algorithms require only samplesrather than pdfs of loads and solar generation, and involvesolving simple convex quadratic programs. Numerical tests inSection VI on a Southern California Edison feeder corrobo-rate the validity of our findings. The paper is concluded inSection VII.
Regarding notation, lower-(upper-)case boldface letters de-note column vectors (matrices), with the only exception of thepower flow vectors, which are uppercase. Calligraphic lettersare used to denote sets. Symbol > denotes transposition, while0 and 1 are the all-zeros and all-ones vectors of appropriatedimensions. The indicator function 1· equals 1 when itsargument is true, and 0 otherwise. A diagonal matrix withthe entries of vector x on its main diagonal is denoted bydg(x). The operator [·]+ projects its argument onto the positiveorthant. Symbols Pr· and E[·] are reserved for probabilitiesand the expectation operator accordingly.
II. PROBLEM FORMULATION
Consider a distribution grid whose energy needs are pro-cured by distributed renewable generation, distributed con-ventional (small diesel) generators, and the main grid. Thedistribution grid operator aims at serving the load at theminimum cost while respecting voltage regulation and dis-tribution network constraints. Energy is exchanged with themain grid at whole-sale electricity prices through the feederbus. To effectively integrate stochastic renewable generation,the focus here is on short-term grid dispatch. To that end,the distribution grid is operated at two timescales: a slowertimescale corresponds to 5- or 10-min real-time energy marketintervals, while the power inverters found in PVs are controlledat a faster timescale of say 10-sec intervals. One period of theslower timescale is comprised by T faster time slots indexedby t = 1, . . . , T .
The grid is operated as a radial network with N + 1 busesrooted at the substation bus indexed by n = 0. The distributionline feeding bus n is also indexed by n for n = 1, . . . , N . Letpn,t and qn,t denote respectively the net active and reactivepower injections at bus n and slot t; the N -dimensional vectorspt and qt collect the net injections at all buses except forthe substation. Diesel generators are dispatched at the slowertimescale to generate pd throughout the subsequent T slotsat unit power factor. During slot t, PVs can contribute solargeneration up to prt that is modeled as a random process.Smart inverters perform active power curtailment and reactivepower compensation by following the setpoints prt and qrtcommanded by the utility operator. Load demands representedby plt and qlt are modeled as random processes as well. Tosimplify the exposition, loads (plt,q
lt) are assumed inelastic
and known at the beginning of slot t; even though elasticloads can be incorporated without any essential differences.The operator buys a power block pa0 from the main grid at theslow timescale, which can be adjusted to p0,t := pa0 + pδ0,t inactual time.
Voltage regulation is effected by controlling (re)activepower injections at slot t. Let vn,t denote the squared voltagemagnitude at bus n and slot t, and vt the vector collectingvn,tNn=1. The substation voltage va0 is controlled at theslower timescale [16], while voltage magnitudes at all busesmust adhere to voltage regulation standards, e.g., ANSI C84.1and EN50160 in [33], [34]. These standards differentiatebetween two voltage regions: one for normal operation denotedhere by VA, and one whose use is limited in frequency andduration and will be denoted by VB . Based on these regions,two alternative dispatching schemes will be formulated. Bothschemes constraint voltages within VB at all times, whileregion VA is enforced in a stochastic fashion: The first schemeguarantees that voltages lie in VA on the average, whereas thesecond one maintains the probability of under-/over-voltage ata specified low value.
A. Grid modelingTo capture voltage and network limitations, the distribution
grid is captured by the approximate linear distribution flow(LDF) model, which is briefly reviewed next [35]. Let r andx be accordingly the vectors of line resistances and reactancesacross lines. Define also the branch-bus incidence matrix A ∈RN×(N+1) whose (i, j)-th entry is
Aij =
+1 , if j − 1 is the source bus of line i−1 , if j − 1 is the destination bus of line i0 , otherwise.
(1)
Partition A into its first column and the reduced branch-busincidence matrix A as A = [a0 A]. Ignoring line losses, theLDF model asserts that the vectors of active and reactive linepower flows at time t can be approximated by
Pt = F>pt and Qt = F>qt (2)
where F := A−1. Moreover, the squared voltage magnitudescan be expressed as [35], [36], [37]
vt = 2Rpt + 2Xqt + vd01 (3)

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 3
where R := Fdg(r)F> and X := Fdg(x)F>. Let us definethe voltage regulation regions
VA := v : vA1 ≤ v ≤ vA1 (4a)VB := v : vB1 ≤ v ≤ vB1 (4b)
with vB ≥ vA and vB ≤ vA. Compliance with VA canbe imposed either on the average as Et [vt] ∈ VA, or inprobability as Prvt ∈ VA ≥ 1−α for some small α. Eitherway, safe grid operation requires that vt ∈ VB at all timest. The random processes involved (demand and renewablegeneration) can be assumed ergodic, i.e., their time averagesconverge to their ensemble averages. For this reason, voltageconstraints pertaining to VA will be referred to as ergodic.
According to (2), if fn is the n-th column of F, the squaredpower flow on line n can be written as P 2
n,t = p>t fnf>n pt
and Q2n,t = q>t fnf
>n qt. Imposing the upper limit Sn on
the apparent flow on line n is thus expressed as the convexquadratic constraint
p>t fnf>n pt + q>t fnf
>n qt ≤ S
2
n. (5)
Assuming voltage magnitudes to be close to unity, ac-tive power losses can be approximated as
∑Nn=1 rn(P 2
n,t +Q2n,t) [38], which from (2)–(3), can be equivalently expressed
as P>t dg(r)Pt+Q>t dg(r)Qt = p>t Rpt+q>t Rqt. Thus, theactive power injection at the substation is approximately
p0,t = −1>pt + p>t Rpt + q>t Rqt (6)
Regarding smart inverters, the injection from the inverterlocated on bus n at slot t should belong to the feasible set
Ωn(t) :=
(prn,t, qrn,t) : 0 ≤ prn,t ≤ prn,t, (7a)
|qrn,t| ≤ φnprn,t, (7b)
(prn,t)2 + (qrn,t)
2 ≤ s2n
(7c)
that is random and time-variant due to the variability of prn,t.Constraint (7a) limits the active power generation accordingto the available solar power; constraint (7b) enforces thelower limit cos(arctan(φn)) on the power factor (lagging orleading); and (7c) limits the inverter apparent power.
B. Operation costs
If PV owners are compensated at price π for the activepower surplus they inject into the distribution grid, the relatedutility cost at slot t is CPV(prt ) := π>[prt − plt]+ with [x]+denoting the operator [x]+ := max0, x applied entrywise onvector x. The diesel generation cost is represented by CD(pd).Regarding energy transactions with the main grid, the powerblock pa0 bought in advance is charged at a fixed and knownprice β. Deviating from pa0 by pδ0,t at slot t is charged at
Ct(pδ0,t) := γb[pδ0,t]+ − γs[−pδ0,t]+ (8)
for known prices (γb, γs). To avoid arbitrage, it is assumedthat 0 < γs < β < γb; see e.g., [3], [25]. Then,the deviation charge can also be expressed as Ct(pδ0,t) =maxγbpδ0,t, γspδ0,t, which is certainly convex [21].
C. Optimal grid dispatch
Depending on the way compliance with voltage regulationregion VA is enforced, two grid dispatch formulations aredeveloped next. Commencing with the average dispatch, theoptimal grid operation is posed as
P∗a := min CD(pd) + βpa0 +Et
[Ct(pδ0,t) + CPV(prt )
](9a)
s.to: pt = prt − plt + pd (9b)
qt = qrt − qlt (9c)
p0,t = pa0 + pδ0,t (9d)
p0,t ≥ −1>pt + p>t Rpt + q>t Rqt (9e)
p>t fnf>n pt + q>t fnf
>n qt ≤ Sn, ∀n ∈ N (9f)
pd ≤ pd ≤ pd (9g)
(prn,t, qrn,t) ∈ Ωn(t), ∀n ∈ N (9h)
v0 ≤ va0 ≤ v0 (9i)vt = 2Rpt + 2Xqt + va01 (9j)vt ∈ VB (9k)Et [vt] ∈ VA (9l)
over va0 , pa0 ,p
d, pt,qt,vt,prt ,qrt , p0,t, pδ0,tTt=1.
The slow-timescale variables va0 , pa0 ,pd are set in ad-vance, and remain fixed throughout the T subsequentcontrol slots over which the fast-timescale variablespt,qt,vt,prt ,qrt , p0,t, pδ0,tTt=1 are implemented. The lattervariables depend on the randomness of slot t as well as slow-timescale decisions.
Alternatively to (9), the optimal grid operation can beexpressed by the probabilistic dispatch that is identical to (9)with the exception that (9l) is replaced by the probabilisticconstraint
Prvt /∈ VA ≤ α (10)
for some small parameter α > 0, say α = 0.05. The optimalcost for the probabilistic dispatch will be denoted by P∗p.
The objective function in (9a) involves the cost of en-ergy dispatched at the slow timescale plus the average fast-timescale energy management cost. Nodal (re)active powerbalance is ensured via (9b)–(9c). Constraint (9e) accounts forthe active power losses upon relaxing the quadratic equation in(6) to a convex inequality without loss of optimality. Constraint(9f) limits the apparent power flow at each line n based on(5). Constraints (9i)–(9l) are voltage regulation constraints:In detail, (9j) relates squared voltage magnitudes to powerinjections [cf. (3)]; (9i) constraints the substation bus voltage;and (9k) constraints voltages in VB . While (9l) maintains theaverage voltage magnitudes in VA, its alternative in (10) limitsthe probability of voltage magnitudes being outside VA.
III. PROBLEM ANALYSIS
To facilitate algorithmic developments, the problem in(9) is expressed in a more compact form next. Col-lect the slow-timescale variables in vector z> :=[va0 , p
a0 ,p
d]; the fast-timescale variables at slot t in y>t :=[pt,qt,vt,p
rt ,q
rt , p0,t, p
δ0,t]; and the random variables in-
volved at slot t in ξ>t := [prt ,plt,q
lt].

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 4
The constraints of (9) can be then classified into four groups:(i) Constraints involving fast-timescale variables only, such
as (9c), (9f), (9h), and (9k), that will be abstracted as yt ∈ Yt.(ii) Constraints (9g) and (9i) that involve slow-timescale
variables only, and they will be denoted as z ∈ Z .(iii) The linear constraints (9b), (9d), and (9j), coupling
slow- and fast-timescale variables as well as random variables.These constraints are collectively expressed as Kz + Byt =Hξt for appropriate matrices K, B, and H.
(iv) The ergodic constraints (9l) and (10) depend on thevoltage sequence vt, hence coupling decisions across time.A substantial difference between (9l) and (10) is that the latteris a non-convex constraint.
Based on the above grouping, the two dispatch problemscan be compactly rewritten as
P∗(a,p) := minz,yt
f(z) +Et [gt(yt)] (11a)
s.to: z ∈ Z (11b)yt ∈ Yt ∀t (11c)Kz + Byt = Hξt ∀t (11d)Et [h(yt)] ≤ 0 (11e)
where f(z) := CD(pd) + βpa0 and gt(yt) := Ct(pδ0,t) +CPV(prt ). For the average dispatch, the optimal cost in (11) isP∗a and the function in (11e) is h(yt) = [vt−vA1, vA1−vt].For the probabilistic dispatch, the optimal cost is P∗p and thefunction in (11e) is h(yt) = 1vt /∈ VA − α.
The optimal values for the slow-timescale variables z haveto be decided in advance. Once the optimal z has been found,it remains fixed over the slow-timescale interval. The fast-timescale decisions yt(z) for slot t depend on the slow-timescale variable z, while the subscript t indicates theirdependence on the realization ξt. Both the average and theprobabilistic dispatch are stochastic programming problemswith recourse [3]. Their costs can be decomposed as P∗(a,p) =minz∈Z f(z) + G(a,p)(z), where the so termed expected re-course function is defined as
G(a,p)(z) := minyt∈Yt
Et [gt(yt)] (12a)
s.to: Kz + Byt = Hξt ∀t (12b)Et [h(yt)] ≤ 0 (12c)
with yt(z) being one of its minimizers. The ensuing twosections solve the average and the probabilistic dispatches.
IV. AVERAGE DISPATCH ALGORITHM
This section tackles problem (11) with the ergodic constraintin (11e), for which h(yt) = [vA1− vt,vt − vA1]. Althoughconvex, this problem is challenging due to the coupling acrossyt and between fast- and slow-timescale variables. A dualdecomposition approach is adopted to resolve the couplingacross yt. The partial Lagrangian function for (12) is
La(yt,ν) := Et
[gt(yt) + ν>h(yt)
]. (13)
The corresponding dual function is
Da(ν; z) := minyt∈Yt
La(yt,ν) (14)
s.to: Kz + Byt = Hξt ∀t.
Observe that the minimization in (14) is separable over therealizations ξt. Precisely, the optimal fast-timescale variablefor fixed (ν, z) and for a specific realization ξt can be foundby solving:
y∗t (ν, z) ∈ arg minyt∈Yt
gt(yt) + ν>h(yt) (15a)
s.to: Kz + Byt = Hξt. (15b)
For future reference, let us also define λ∗t (ν, z) as the optimalLagrange multiplier associated with (15b). If ν is partitionedas ν = [ν,ν] with ν corresponding to constraint Et[vt] ≥ vA1and ν to Et[vt] ≤ vA1, then (15) simplifies to
y∗t (ν, z) ∈ argmin Ct(pδ0,t) + CPV(prt ) + (ν − ν)>vt (16)
s.to: (9b)− (9f), (9h), (9j), (9k)
over pt,qt,vt,prt ,qrt , p0,t, pδ0,t
and can be solved as a convex quadratic program. Given theoptimal pair (ν∗, z∗), the optimal fast-timescale variables ytcan be thus found for any ξt.
Back to finding the optimal primal and dual slow-timescalevariables, observe that the dual problem associated to (14) is
ν∗ := arg maxν≥0
Da(ν; z). (17)
Duality theory asserts that (17) is a convex problem. Moreover,assuming a strictly feasible point exists for (12), strong dualityimplies that Ga(z) = Da(ν∗, z). Due to the latter, the originalproblem in (11) can be transformed to:
minz∈Z
f(z) +Ga(z) = minz∈Zf(z) + max
ν≥0Da(ν; z) (18a)
= minz∈Z
maxν≥0
fa(ν, z) (18b)
where the auxiliary function fa is defined as:
fa(ν, z) := f(z) +Da(ν; z). (19)
Being a dual function, Da(ν; z) is a concave function of ν. Atthe same time, Da(ν; z) is a perturbation function with respectto z; and hence, it is a convex function of z. Recall that f(z) isa convex function of z too. Therefore, the auxiliary functionfa(ν, z) is convex in z and concave in ν. Because of therandomness of ξt, function Da(ν; z) in (14) is stochastic.Consequently, problem (18b) is a stochastic convex-concavesaddle point problem [39], [31].
To solve (18b), we rely on the stochastic saddle-pointapproximation method of [31]. The method involves thesubgradient of fa wrt z, and its supergradient wrt ν. Uponviewing Da(ν, z) in (14) as a perturbation function of z, thesubgradient of fa with respect to z is [39]
∂zfa = ∂zf(z) + K>Et[λ∗t (ν, z)]. (20)
By definition of the dual function, the supergradient of fa withrespect to ν is
∂ν fa = Et[h(y∗t (ν, z))]. (21)
The stochastic saddle point approximation method of [31]involves primal-dual subgradient iterates with the expectations

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 5
Algorithm 1 Average Dispatch Algorithm (ADA)1: Initialize (z0,ν0).2: repeat for k = 0, 1, . . .3: Draw sample ξk.4: Find (y∗k(νk, zk),λ∗k(νk, zk)) by solving (15).5: Update (zk+1,νk+1) via (22).6: Compute sliding averages (zk, νk) through (23).7: until convergence of (zk, νk).8: Output z∗ = zk and ν∗ = νk.
in (20)–(21) being replaced by their instantaneous estimatesbased on a single realization ξk. Precisely, the method involvesthe iterates over k:
νk+1 := [νk + dg(µk)h(y∗k(νk, zk))]+ (22a)
zk+1 := [zk − dg(εk)(∂zf(zk) + K>λ∗k(νk, zk))]Z (22b)
where the operator [·]Z projects its argument onto Z; andvectors µk = µ0/
√k and εk = ε0/
√k collect respectively
the primal and dual step sizes for positive µ0 and ε0. At everyiteration k, the method draws a realization ξk and solves (15)for the tuple (ξk,ν
k, zk) to acquire (y∗k(νk, zk),λ∗k(νk, zk))and perform the primal-dual updates in (22). The methodfinally outputs the sliding averages of the updates as:
zk :=
∑ki=dk/2e z
i/√i∑k
i=dk/2e 1/√i
(23a)
νk :=
∑ki=dk/2e ν
i/√i∑k
i=dk/2e 1/√i. (23b)
The proposed scheme converges to the value fa(ν∗, z∗) ob-tained at a saddle point (ν∗, z∗) asymptotically in the numberof iterations k [31, Sec. 3.1].
Upon convergence of the iterates in (23), the slow-timescalevariables z∗ have been derived together with the optimalLagrange multiplier ν∗ related to constraint (12c). The gridoperator can implement z∗, and the fast-timescale decisionsy∗t for a realization ξt can be found by solving (16). Theaverage dispatch algorithm (ADA) is summarized as Alg. 1.
V. PROBABILISTIC DISPATCH ALGORITHM
The probabilistic version of problem (11) is considered next.Here, the ergodic constraint (11e) reads h(yt) = 1vt /∈VA − α. Although the non-convexity of the probabilisticconstraint does not affect the optimality while solving (12),optimality cannot be claimed when solving for (11). A heuris-tic solution is detailed next by adapting the solution of Sec. IV.
Dual decomposition is used here as well: If ν is thescalar Lagrange multiplier associated with constraint (11e), thepartial Lagrangian function for (12) is now Lp(yt, ν) :=Et [gt(yt) + ν(1vt /∈ VA − α)]. The corresponding dualfunction, fast-timescale problem, and dual problem are definedanalogously to (14), (15), and (17). The indicator functionrenders Lp(yt, ν) non-convex. Surprisingly enough though,under the practical assumption that ξt follows a continuouspdf, problem (12) enjoys zero duality gap; see [32, Th. 1].
Algorithm 2 Probabilistic Dispatch Algorithm (PDA)1: Initialize (z0, ν0).2: repeat for k = 0, 1, . . .3: Draw sample ξk.4: Find (y∗k,B(νk, zk),λ∗k,B(νk, zk)) by solving (25).5: Set y∗t (ν, z) := y∗t,B(z) and λ∗t (ν, z) := λ∗t,B(z).6: if v∗k,B(z) /∈ VA, then find y∗k,A(νk, zk) and
λ∗k,A(νk, zk) by solving (26).7: if gt(y
∗t,A(z)) ≤ gt(y
∗t,B(z)) + ν, then set
y∗t (ν, z) := y∗t,A(z) and λ∗t (ν, z) := λ∗t,A(z).8: end if9: end if
10: Update (zk+1, νk+1) via (27).11: Compute sliding averages (zk, νk) through (23).12: until convergence of (zk, νk).13: Output z∗ = zk and ν∗ = νk.
The additional challenge here is the non-convexity of theLagrangian minimization:
y∗t (ν, z) ∈ arg minyt∈Yt
gt(yt) + ν1vt /∈ VA (24)
s.to: Kz + Byt = Hξt.
Because the indicator function takes only the values 0, 1however, the solution to (24) can be found by solving a pairof slightly different convex problems. The first problem is
y∗t,B(z) ∈ arg minyt∈Yt
gt(yt) (25a)
s.to: Kz + Byt = Hξt. (25b)
Let λ∗t,B(z) being the optimal Lagrange multiplier associatedwith (25b). The second problem is obtained from (25) withthe extra constraint that vt ∈ VA:
y∗t,A(z) ∈ arg minyt∈Yt
gt(yt) (26a)
s.to: Kz + Byt = Hξt (26b)vt ∈ VA. (26c)
Let also λ∗t,A(z) being the optimal Lagrange multiplier asso-ciated with (26b). Observe that neither problem (25) nor (26)depend on ν, while their complexity is similar to that of theproblem in (15). Having solved (25)–(26), problem (24) canbe neatly tackled by identifying two cases:
(c1) If gt(y∗t,A(z)) > gt(y∗t,B(z)) + ν, then y∗t,B(z) is
a minimizer of (24) as well and voltages are allowed tolie outside VA. In this case, set y∗t (ν, z) := y∗t,B(z) andλ∗t (ν, z) := λ∗t,B(z). This case includes instances whereproblem (26) is infeasible for which gt(y∗t,A(z)) =∞.
(c2) If gt(y∗t,A(z)) ≤ gt(y∗t,B(z)) + ν, then y∗t,A(z) min-
imizes (24) too and voltages lie within VA. In this case, sety∗t (ν, z) := y∗t,A(z) and λ∗t (ν, z) := λ∗t,A(z).
Case (c2) covers also instances where v∗t,B(z) happens tolie in VA. In these particular instances, y∗t,B(z) serves as aminimizer of (26) too. Then, it follows that gt(y∗t,A(z)) =gt(y
∗t,B(z)) ≤ gt(y∗t,B(z))+ν for ν ≥ 0. Hence, if v∗t,B(z) ∈
VA, there is no need to solve problem (26).

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 6
To find the optimal slow-timescale variables under theprobabilistic dispatch, the stochastic primal-dual iterations ofSec. IV are adapted here as
νk+1 := [νk + µk(1v∗k(νk, zk) /∈ VA − α)]+ (27a)
zk+1 := [zk − dg(εk)(∂zf(zk) + K>λ∗k(νk, zk)]Z . (27b)
The probabilistic dispatch algorithm (PDA) is tabulated asAlg. 2. Because function Gp(z) is not necessarily convex, theiterates in (27) are not guaranteed to converge to a minimizerof (11). The practical performance of PDA in finding z∗ isnumerically validated in Sec. VI.
VI. NUMERICAL TESTS
The proposed grid dispatches were tested on a 56-busSouthern California Edison (SCE) distribution feeder [11].5-MW PVs were added on buses 44 and 50; both with 6-MVA inverters enabling power factors as low as 0.83 (lead-ing or lagging) at full solar generation. The prices for theenergy exchange with the main grid were β = 37 $/MWh;γb = 45 $/MWh, and γs = 19 $/MWh. Diesel generatorswith capacity pdn = 0.5 MW were sited on buses 10, 18, 21,30, 36, 43, 51, and 55. The cost of diesel generation wasCD(pd) =
∑Nn=1(30pdn + 15(pdn)2) $/h with pd expressed
in MW. Apparent power flows were limited to 7 MVA. Thevoltage operation limits were set to vA = 0.982, vA = 1.022,vB = 0.972, and vB = 1.032, expressed in pu with respect toa voltage base of 12 kV. Active and reactive nodal loads wereGaussian distributed with a mean value equal to the nominalload of the SCE benchmark, and a standard deviation of 0.2times the nominal load. The solar energy generated at each PVwas uniformly distributed between 0.5 and 1 times the actualpower PV rating.
ADA was run for 40,000 iterations. Step sizes were selectedproportional to 1/
√k with initial values εv00 = 4 · 10−5,
εp00 = 4 · 10−1, εpd0 = 6 · 10−3, and µ0 = 225, to accountfor different dynamic ranges. The iterates for primal and dualvariables as well as their corresponding sliding averages aredepicted in Fig. 1. Primal and dual slow-timescale variableshover in a small range whose width diminishes with time.Their sliding averages converge asymptotically. The algorithmreaches a practically meaningful solution within 5,000 itera-tions. Buses 44 and 50 are prone to over-voltages since theyhost PV generation, thus yielding non-zero dual variables forthe average upper voltage constraints.
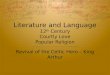
PDA was tested using the same simulation setup for α =0.05 and µ0 = 1. Figure 2 shows the convergence of primaland dual variables, the probability of voltages lying within VA,and the grid operational cost. Granted that the probabilisticconstraint in (10) applies collectively to all buses, the under-/over-voltage probabilities on a per-bus basis is depicted inFig. 3. The occurrences of overvoltage seems to be sharedprimarily among buses 40–56 which are neighboring to thePV buses 40 and 55. On the contrary, buses 10–16 beingelectrically far from both the substation and PVs, experienceunder-voltage with a small probability.
The effect of the average versus the probabilistic con-straint on voltage magnitudes was evaluated next. After slow-timescale variables z had converged, fast-timescale variables
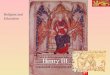
yt were calculated for 6,000 instances of ξt using both ADAand PDA. The histograms of the voltage magnitudes on tworepresentative buses are presented in Fig. 4. Under PDA, theaverage voltage on bus 15 is slightly higher than the averagevoltage obtained by ADA. In exchange, the instantaneousvalue of the voltage on bus 15 stays in VA with higherprobability. A similar behavior is observed for the overvoltageinstances on PV bus 40.
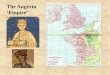
ADA and PDA were finally compared against two al-ternative schemes. According to the first henceforth calledapproximate scheme, variables z are calculated by settingloads and solar generation to their expected values, whileyt are found by solving either (15) or (24), depending onwhether the setting is average or probabilistic. The seconddeterministic scheme finds z as the approximate scheme does,and yt’s are found by enforcing vt ∈ VA at all times. Thefour dispatches were tested under five scenarios: Scenario 1is the setup described earlier. Scenario 2 involved the tightervoltage limits vA = 0.992 and vA = 1.012. Scenarios 3,4, and 5 were generated by scaling the mean value and thestandard deviation for loads of Scenario 1 by 0.5, 1.5, and 2,respectively. Figure 5 shows the expected operation costs forall five scenarios. ADA (PDA) yielded the lowest cost underall scenarios in the average (probabilistic) setting as expected.Under the same operating conditions, the optimal cost for theaverage setting turned out to be slightly lower than that forthe probabilistic one. Moreover, the improvement from theapproximate scheme to the optimal one is larger than thatfrom the deterministic scheme to the approximate one.
VII. CONCLUSIONS
By nature of renewable generation, electromechanical com-ponent limits, and the manner markets operate, energy man-agement of smart distribution grids involves decisions atslower and faster timescales. Since slow-timescale controlsremain fixed over multiple PV operation slots, decisions arecoupled across time in a stochastic manner. To accommo-date solar energy fluctuations, voltages have been allowedto be sporadically overloaded; hence introducing couplingof fast-timescale variables on the average or in probability.Average voltage constraints have resulted in a stochasticconvex-concave problem, whereas non-convex probabilisticconstraints have yielded a convex recourse function. Efficientalgorithms for finding both slow and fast controls using onlyrandom samples have been put forth. Our two novel solversconverge in terms of the primal and dual variables, and haveattained lower operational costs compared to deterministicalternatives. Although probabilistic constraints have been ap-plied grid-wise, voltages on individual buses remained withinlimits. Enforcing probabilistic constraints on a per-bus basis,developing decentralized implementations, and including volt-age regulators constitute interesting research directions.
REFERENCES
[1] E. Liu and J. Bebic, “Distribution system voltage performanceanalysis for high-penetration photovoltaics,” National RenewableEnergy Laboratory, Tech. Rep., Feb. 2008. [Online]. Available:https://www1.eere.energy.gov/solar/pdfs/42298.pdf

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 7
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
0.05
0.1
0.15
0.2
0.25
I te ration index
pd[M
W]
(a)
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0.97
0.98
0.99
1
V0[p
u]
I te rat ion index
(b)
0.5 1 1.5 2 2.5 3 3.5 4
x 104
−4.5
pa 0[M
W]
0.5 1 1.5 2 2.5 3 3.5 4
x 104
−4.9
−4.8
−4.7
−4.6
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
2
4
6
8
10
12
14
I te ration index
ν
(c)
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
1
2
3
4
5
6
7
I te ration index
ν
(d)
Fig. 1. Convergence for ADA: a) diesel generation; b) substation voltage v0 (left y-axis) and energy exchange pa0 (right y-axis); c) dual variables associatedwith average lower voltage limits for all buses; and d) dual variables associated with average upper voltage limits for all buses. Sliding averages of optimizationvariables are depicted too.
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
0.05
0.1
0.15
0.2
0.25
0.3
pd(M
W)
(a)
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0.96
0.97
0.98
0.99
1
1.01
1.02
V0[p
u]
(b)
0.5 1 1.5 2 2.5 3 3.5 4
x 104
−5
−4.8
−4.6
pa 0[M
W]
0.5 1 1.5 2 2.5 3 3.5 4
x 104
−5
−4.8
−4.6
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Prv
/∈Vtight
(c)
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0
0.5
1
1.5
2
ν
0.5 1 1.5 2 2.5 3 3.5 4
x 104
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Fig. 2. Convergence for PDA: a) diesel generation; b) substation voltage v0 (left y-axis) and energy exchange pa0 (right y-axis); and c) dual variables associatedwith probabilistic constraint (left y-axis) and probability of under-/over-voltage (right y-axis). Sliding averages of optimization variables are depicted too.
[2] P. M. S. Carvalho, P. F. Correia, and L. A. Ferreira, “Distributed reactivepower generation control for voltage rise mitigation in distributionnetworks,” IEEE Trans. Power Syst., vol. 23, no. 2, pp. 766–772, May2008.
[3] P. P. Varaiya, F. F. Wu, and J. W. Bialek, “Smart operation of smartgrid: Risk-limiting dispatch,” Proc. IEEE, vol. 99, no. 1, pp. 40–57, Jan.2011.
[4] K. Turitsyn, P. Sulc, S. Backhaus, and M. Chertkov, “Options for controlof reactive power by distributed photovoltaic generators,” Proc. IEEE,vol. 99, no. 6, pp. 1063–1073, Jun. 2011.
[5] B. Zhang, A. Dominguez-Garcia, and D. Tse, “A local control approachto voltage regulation in distribution networks,” in Proc. North AmericanPower Symposium, Manhattan, KS, Sep. 2013.
[6] V. Kekatos, L. Zhang, G. B. Giannakis, and R. Baldick, “Voltageregulation algorithms for multiphase power distribution grids,”
IEEE Trans. Power Syst., 2015, (submitted). [Online]. Available:http://arxiv.org/abs/1508.06594
[7] S. Bolognani, R. Carli, G. Cavraro, and S. Zampieri, “Distributedreactive power feedback control for voltage regulation and loss mini-mization,” IEEE Trans. Automat. Contr., vol. 60, no. 4, pp. 966–981,Apr. 2015.
[8] H. Zhu and H. J. Liu, “Fast local voltage control under limited reactivepower: Optimality and stability analysis,” IEEE Trans. Power Syst.,2016, (to appear).
[9] S. Paudyal, C. A. Canizares, and K. Bhattacharya, “Optimal operation ofdistribution feeders in smart grids,” IEEE Trans. Ind. Applicat., vol. 10,no. 58, pp. 4495–4503, Oct. 2011.
[10] M. Farivar and S. Low, “Branch flow model: Relaxations and convexifi-cation — Part I,” IEEE Trans. Power Syst., vol. 28, no. 3, pp. 2554–2564,Aug. 2013.

IEEE TRANSACTIONS ON SMART GRID (SUBMITTED JULY, 2016) 8
10 20 30 40 500
0.025
0.05
0.075
Bus index n
α =
PrVn > 1 .02PrVn < 0 .98
Fig. 3. Per-bus probability of under-/over-voltages.
Fig. 4. Histograms of voltage magnitudes on buses 15 and 40 under ADA(top) and PDA (bottom). Dashed lines show regulation limits VA and VB .
[11] L. Gan, N. Li, U. Topcu, and S. H. Low, “Exact convex relaxation ofoptimal power flow in radial networks,” IEEE Trans. Automat. Contr.,vol. 60, no. 1, pp. 72–87, Jan. 2015.
[12] E. Dall’Anese, S. V. Dhople, and G. B. Giannakis, “Optimal dispatch ofphotovoltaic inverters in residential distribution systems,” IEEE Trans.Sustain. Energy, vol. 5, no. 2, pp. 487–497, Dec. 2014.
[13] E. Dall’Anese, H. Zhu, and G. B. Giannakis, “Distributed optimal powerflow for smart microgrids,” IEEE Trans. Smart Grid, vol. 4, no. 3, pp.1464–1475, Sep. 2013.
[14] B. Zhang, A. Y. S. Lam, A. D. Domnguez-Garca, and D. Tse, “An opti-mal and distributed method for voltage regulation in power distributionsystems,” IEEE Trans. Power Syst., vol. 30, no. 4, pp. 1714–1726, Jul.2015.
[15] Q. Peng and S. H. Low, “Distributed optimal power flow algorithm forradial networks, I: Balanced single phase case,” IEEE Trans. Smart Grid,2016 (to appear).
[16] M. Farivar, R. Neal, C. Clarke, and S. Low, “Optimal inverter VARcontrol in distribution systems with high PV penetration,” in Proc. IEEEPower & Energy Society General Meeting, San Diego, CA, Jul. 2012.
[17] A. H. Etemadi, E. J. Davison, and R. Iravani, “A decentralized robustcontrol strategy for multi-DER microgrids – Part I: Fundamental con-cepts,” IEEE Trans. Power Delivery, vol. 27, no. 4, pp. 1843–1853, Oct.2012.
[18] F. Dorfler, J. W. Simpson-Porco, and F. Bullo, “Breaking the hierarchy:Distributed control & economic optimality in microgrids,” 2014, (underreview). [Online]. Available: http://arxiv.org/pdf/1401.1767v1.pdf
[19] E. D. Anese and A. Simonetto, “Optimal power flow pursuit,” IEEETrans. Smart Grid, 2016 (to appear).
[20] A. J. Conejo, M. Carrion, and J. M. Morales, Decision making underuncertainty in electricity markets. Springer, 2010.
Test Case 1 Test Case 2 Test Case 3 Test Case 4 Test Case 5
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
20
Net
wor
k op
erat
ion
cost
($/h
)
avg prob avg prob avg prob avg prob avg prob
Optimal SchemeApproximate SchemeDeterministic Scheme
Fig. 5. Performance for ADA, PDA, the approximate, and the deterministicscheme.
[21] Y. Zhang, N. Gatsis, and G. B. Giannakis, “Robust energy managementfor microgrids with high-penetration renewables,” IEEE Trans. Sustain.Energy, vol. 4, no. 4, pp. 944–953, Oct. 2013.
[22] F. Bouffard, F. D. Galiana, and A. J. Conejo, “Market-clearing withstochastic security–Part I: Formulation,” IEEE Trans. Power Syst.,vol. 20, no. 4, pp. 1818–1826, Nov. 2005.
[23] D. Bienstock, M. Chertkov, and S. Harnett, “Chance-constrained optimalpower flow: Risk-aware network control under uncertainty,” SIAM Rev.,vol. 56, no. 3, pp. 461–495, Aug. 2014.
[24] R. Rajagopal, E. Bitar, P. Varaiya, and F. Wu, “Risk-limiting dispatch forintegrating renewable power,” Intl. Journal of Electrical Power & EnergySystems, vol. 44, no. 1, pp. 615–628, 2013.
[25] B. Zhang, R. Rajagopal, and D. Tse, “Network risk limiting dispatch:Optimal control and price of uncertainty,” IEEE Trans. Automat. Contr.,vol. 59, no. 9, pp. 2442–2456, Sep. 2014.
[26] F. Bouffard and F. D. Galiana, “Stochastic security for operationsplanning with significant wind power generation,” IEEE Trans. PowerSyst., vol. 23, no. 2, pp. 306–316, May 2008.
[27] Y. Zhang and G. B. Giannakis, “Efficient decentralized economicdispatch for microgrids with wind power integration,” in In Proc. IEEEGreen Tech. Conf., Corpus Christi, TX, Apr. 2014.
[28] M. S. E. Moursi, W. Xiao, and J. L. Kirtley, “Fault ride throughcapability for grid interfacing large scale PV power plants,” IET Gener.Transm. Dis., vol. 7, no. 9, pp. 1027–1036, Sep. 2013.
[29] G. Wang, V. Kekatos, A. J. Conejo, and G. B. Giannakis, “Ergodicenergy management leveraging resource variability in distribution grids,”IEEE Trans. Power Syst., 2016 (to appear).
[30] L. M. Lopez-Ramos, V. Kekatos, A. G. Marques, and G. B. Giannakis,“Microgrid dispatch and price of reliability using stochastic approxima-tion,” in Proc. IEEE Global Conf. on Signal and Information Process.,Orlando, FL, Dec. 2015.
[31] A. Nemirovski, A. Juditsky, G. Lan, and A. Shapiro, “Robust stochasticapproximation approach to stochastic programming,” SIAM J. Optim.,vol. 19, no. 4, pp. 1574–1609, 2009.
[32] A. Ribeiro and G. B. Giannakis, “Separation principles in wirelessnetworking,” IEEE Trans. Inform. Theory, vol. 56, no. 9, pp. 4488–4504,Sep. 2010.
[33] C84.1-1995 Electric Power Systems and Equipment Voltage Ratings (60Herz), ANSI Std., 2011.
[34] EN 50160: Voltage Characteristics of Public Distribution Systems, DINStd., Jul. 2004.
[35] M. Baran and F. Wu, “Network reconfiguration in distribution systemsfor loss reduction and load balancing,” IEEE Trans. Power Delivery,vol. 4, no. 2, pp. 1401–1407, Apr. 1989.
[36] M. Farivar, L. Chen, and S. Low, “Equilibrium and dynamics of localvoltage control in distribution systems,” in Proc. IEEE Conf. on Decisionand Control, Florence, Italy, Dec. 2013, pp. 4329–4334.
[37] V. Kekatos, L. Zhang, G. B. Giannakis, and R. Baldick, “Acceleratedlocalized voltage regulation in single-phase distribution grids,” in Proc.IEEE Intl. Conf. on Smart Grid Commun., Miami, FL, Nov. 2015.
[38] P. Sulc, S. Backhaus, and M. Chertkov, “Optimal distributed control ofreactive power via the alternating direction method of multipliers,” IEEETrans. Energy Conversion, vol. 29, no. 4, pp. 968–977, Dec. 2014.
[39] S. Boyd and L. Vandenberghe, Convex Optimization. New York, NY:Cambridge University Press, 2004.