Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1
Robust Regressor-Free Control of Rigid RobotsUsing Function Approximations
Donald Ebeigbe, Thang Nguyen, Hanz Richter, and Dan Simon
Abstract—This paper develops a novel regressor-free robustcontroller for rigid robots whose dynamics can be describedusing the Euler-Lagrange equations of motion. The functionapproximation technique (FAT) is used to represent the robot’sinertia matrix, Coriolis matrix, and gravity vector as finite linearcombinations of orthonormal basis functions. The proposedcontroller establishes a robust FAT control framework that usesa fixed control structure. The control objectives are to trackreference trajectories in worst-case scenarios where the robotdynamics are too costly to develop or otherwise unavailable.Detailed stability analysis via Lyapunov functions, the passivityproperty, and continuous switching laws show uniform ultimateboundedness of the closed loop dynamics. Simulation results of athree degree-of-freedom (DOF) robot when the robot parametersare perturbed from their nominal values show good robustness ofthe proposed controller when compared to some well establishedcontrol methods. We also demonstrate success in real-timeexperimental implementation of the proposed controller, whichvalidates practicality for real-world robotic applications.
Index Terms—Robust Control, Function Approximation Tech-nique, Passivity, Lyapunov Stability.
I. INTRODUCTION
ROBUST controllers are designed to give a desired perfor-mance for a range of system uncertainties. Early research
on robust control used feedback linearization of the nonlinearrobot dynamics along a predefined trajectory [1], [2]. An exactlinearization approach that used the positive definite propertyof a robot’s mass matrix was developed in [3].
One well-known robust control method is variable structurecontrol. The advantage of variable structure control is thatthe error is driven to a switching surface, after which thesystem is in a sliding mode in which it will be robust tolarge disturbances [4]. Other robust controllers using variablestructure control were developed in [5], [6]. However, variablestructure control methods use discontinuous switching lawsthat induce chattering, which might excite high-frequencyunmodeled dynamics.
Manuscript received December 13, 2018; revised March 6, 2019; acceptedApril 17, 2019. This research was supported by National Science Foundationgrant 1344954. Recommended by Associate Editor G. Rovithakis. (Corre-sponding author: Donald Ebeigbe).
D. Ebeigbe, and D. Simon are with the Embedded Control SystemsResearch Laboratory, Department of Electrical Engineering and Com-puter Science, Cleveland State University, Cleveland, Ohio, USA (email:[email protected]; [email protected]).
T. Nguyen is with Modeling Evolutionary Algorithms Simulation andArtificial Intelligence, Faculty of Electrical and Electronics Engineering, TonDuc Thang University, Ho Chi Minh City, Vietnam (email: [email protected]).
H. Richter is with the Controls, Robotics, and Mechatronics Laboratory,Department of Mechanical Engineering, Cleveland State University, Cleve-land, Ohio, USA (email: [email protected]).
The regressor-based approach has also been used to de-velop robust and adaptive controllers for robots. In regressor-based control, the dynamic equation of a robot is linearlyparameterized as a product of the regressor matrix and aparameter vector. The regressor matrix contains the nonlin-ear components of the robot dynamics while the parametervector contains robot parameters such as the link massesand moments of inertia. Most regressor-based robust controlutilize fixed control structures and switching laws, while mostregressor-based adaptive controllers utilize update laws toestimate the unknown parameter vector [7]. A regressor-basedsliding mode controller was developed based on the variablestructure control scheme [8]. A regressor-based controller forrobots was developed to give accurate parameter estimationusing the interval excitation condition (IE), which is muchweaker than the persistent excitation (PE) condition [9]. Vari-ous forms of regressor-based controllers have been developedfor robot control [10]–[13]. In recent decades, researchers havecombined adaptive control and robust control to take advantageof the benefits of both methods [14], [15].
Regressor-free control methods, which forgo the use oflinear parameterization into the regressor matrix and parametervector, have been developed to mitigate the drawbacks ofregressor-based robot control. Many model-free robot con-trollers use neural networks and fuzzy systems [16]. Neuro-fuzzy controllers use the universal approximation property andthe linear parameterization property. The unknown parametersof neural network controllers and fuzzy controllers can betuned online. Lyapunov-based techniques have been used todevelop neural network controllers and fuzzy controllers thathave the ability to tune their unknown parameters online withadaptation laws [17]. Neural network control has also beendeveloped for bimanual robots to ensure stability [18]. Radial-basis-functions are well-known universal function approxima-tors that have been used by several neuro-fuzzy controllers forthe control of robots [19]–[22].
Another model-free controller for robots is the function ap-proximation technique (FAT)-based control and several adap-tive FAT controllers have been developed [23]–[27]. FAT-based control does not need the calculation of the regressormatrix. The FAT controller enables the control of robots inthe presence of parametric uncertainties by employing basisfunctions to account for time-varying uncertainties in the robotdynamics [23]. In contrast to neuro-fuzzy control, FAT-basedcontrol does not use any hidden layers, or input-output datafor regression, but rather exploits the structural propertiesof the dynamic equation of a robot. In the FAT controllerframework, the robot’s unknown inertia matrix, Coriolis ma-

2 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
trix, and gravity vector are approximated using Fourier series(FS) expansions or Legendre polynomials (LP). Based onthe orthogonal function theorem [28], nonlinear functionscan be approximated using FS and LP. The adaptive FATcontroller based on Slotine and Li’s method [29] eliminatesthe need for joint acceleration feedback. Trajectory trackingusing impedance control in task space was developed basedon FAT [24]. An adaptive FAT controller was also designedfor flexible robot arms with time-varying uncertainties andunknown bounds [25]. The FAT was used to design anadaptive controller in which the robot dynamics and the jointacceleration feedback were lumped together and treated asunknown time-varying uncertainties [26]. That controller gavegood trajectory tracking in the presence of uncertain systemdynamics. The adaptive FAT controller was combined withSlotine and Li’s method for the control of a test robot /prosthesis [27]. An adaptive FAT controller was designed forthe control of an electrically driven rigid robot [30]. Robustadaptive FAT controllers were designed for the control ofelectrically driven robot manipulators [31]–[33].
However, current FAT control methods are in the formof adaptive control. This is due to the fact that the FATcontrol scheme was based on the premise that there are largedegrees of uncertainty in the robot dynamic equation. Whenimplemented on real-world robots, adaptive control exhibitsproblems during transient response [34]. Most robust adaptiveFAT controllers use an update law and a robustifying term toimprove robustness. The σ modification technique is a popularmethod used to robustify adaptive FAT controllers [25], [27],[33]. The σ modification approach does not use disturbancebounds. The σ modification prevents the estimate of the robotparameters from growing without bounds in the presence ofsystem uncertainties. One of the drawbacks of σ modificationis that when the tracking errors are small, the adaptive pa-rameters tend to converge to zero; that is, they unlearn thegain values that made the tracking errors small. Additionally,the tracking error does not converge to zero even whendisturbances are removed from the system.
The main contribution of this paper is that, for the firsttime, we develop a robust FAT (RFAT) controller with noupdate laws. The controller uses the FAT to represent therobot’s inertia matrix, Coriolis matrix, and gravity vector asfinite linear combinations of orthonormal basis functions. Thecontroller achieves robustness by employing a fixed controlstructure and continuous switching laws. Using Lyapunovfunctions and taking advantage of the passivity property ofrobot dynamics, the controller is proven to provide closedloop dynamics that are uniformly ultimately bounded. Com-puter simulations and experimental tests on a three degree-of-freedom (DOF) robot verify the effectiveness of the proposedcontroller. This controller is most attractive in scenarios wherethe dynamic equation of a robot is too costly to develop or isotherwise unavailable, and guaranteed performance is requiredover a given range of uncertainties without the need to retunecontroller parameters.
This paper is organized as follows. Section II discussesthe dynamic system and reviews the adaptive FAT controller.Section III develops our new robust function approximation
technique (RFAT) controller. Section IV validates RFAT con-troller performance via computer simulations and compares itwith the adaptive FAT, adaptive passivity, and robust passivitycontrollers. Section V validates RFAT controller performancevia experimental tests and compares it with the robust pas-sivity controller. Section VI discusses conclusions and futureresearch.
II. DYNAMIC SYSTEM DESCRIPTION AND REVIEW OFEXISTING TECHNIQUES
This section gives a brief description of the dynamic system,along with a review of the adaptive function approximationtechnique (AFAT) controller. This provides a basis for thedevelopment of the RFAT controller in Section III.
A. Dynamic System
The motion of a rigid robot can be described by the dynamicequation
D(q)q + C(q, q)q + g(q) = τ (1)
where D(q) ∈ Rn×n is the inertia matrix, C(q, q) ∈ Rn×nis the matrix of Coriolis and centripetal forces, g(q) ∈ Rn isthe gravity vector, τ ∈ Rn denotes the torque input, q ∈ Rnis the vector of generalized joint displacements, and n is thenumber of degrees of freedom (DOFs). Note that Eqn. (1)does not consider the effects of external forces. We notethe following properties of Eqn. (1), which will be used insubsequent sections.
Property 1: The inertia matrix D(q) is a positive definitematrix with eigenvalues that satisfy 0 < λ1(q) ≤ λ2(q) ≤λ3(q) · · · ≤ λn(q) such that λ1(q)In ≤ D(q) ≤ λn(q)In,where In is the n× n identity matrix.
Property 2: The matrix D(q)−2C(q, q) is skew-symmetric;that is, xT [D(q)− 2C(q, q)]x = 0 for any vector x ∈ Rn.
Property 3: The left-hand side of Eqn. (1) can be linearlyparameterized in the form
Yr(q, q, q)θ = τ (2)
where Yr(q, q, q) ∈ Rn×l is called the regressor matrix, θ ∈ Rlis a vector of parameters, and l is the number of parameters,which is not unique, but a minimal parameterization canalways be found.
B. Review of Adaptive Function Approximation TechniqueController
The Stone-Weierstrass theorem [33], [35], [36] shows thatorthonormal basis functions provide a universal approximatorfor any nonlinear dynamic system with arbitrary accuracy. If areal-valued periodic or aperiodic function satisfies the Dirichletconditions, then it is equal to the sum of its Fourier serieswithin a time interval [37]. Dirichlet conditions are:
1) The function is absolutely integrable over the timeperiod.
2) The function has a finite number of extrema over thetime period.
3) The function has a finite number of discontinuities overthe time period.

EBEIGBE et al.: ROBUST REGRESSOR-FREE CONTROL OF RIGID ROBOTS USING FUNCTION APPROXIMATIONS 3
An aperiodic function can be assumed to be periodic ifit is restricted to a limited time interval. Since the inertiamatrix, Coriolis matrix, and gravity vector are functions ofq, which is continuous, we can see that they satisfy theDirichlet conditions [38]. This allows us to use Fourier seriesas our orthonormal basis functions. The AFAT controllerframework [39] represents the inertia matrix, Coriolis matrix,and gravity vector as
D(q(t)) = WTDZD(t) + εD(t)
C(q(t), q(t)) = WTCZC(t) + εC(t) (3)
g(q(t)) = WTg Zg(t) + εg(t)
where WD ∈ Rn2βD×n, WC ∈ Rn2βC×n, and Wg ∈ Rnβg×n
are constant weight matrices. ZD(t) ∈ Rn2βD×n, ZC(t) ∈Rn2βC×n, and Zg(t) ∈ Rnβg are matrices of basis functions.εD(t) ∈ Rn×n, εC(t) ∈ Rn×n, and εg(t) ∈ Rn are time-varying approximation errors. βD, βC , and βg denote thenumber of basis functions used for the inertia matrix, Coriolismatrix, and gravity vector respectively. The estimates areexpressed as
D(t) = WTD(t)ZD(t)
C(t) = WTC (t)ZC(t)
g(t) = WTg (t)Zg(t)
(4)
Remark 1: The dependence of D, C, and g on the robotjoint trajectory q and its derivative q will not be indicatedin the notation in the sequel for the sake of convenience.The dependence of the matrix of basis functions Z(·), theapproximation errors ε(·), and the estimate of the weightmatrices W(·) on t will also not be indicated in the notationin the sequel for the sake of convenience.
Define
v = qd − Λq (5)a = v = qd − Λ ˙q (6)r = q − v = ˙q + Λq (7)
where qd ∈ Rn is the reference trajectory, Λ ∈ Rn×n isa tunable diagonal matrix with positive diagonal entries, andq = q − qd. The adaptive FAT control law is
τ = WTDZDa+ WT
CZCv + WTg Zg −Kr (8)
where K ∈ Rn×n is a tunable diagonal matrix with positivediagonal entries. The update laws are given as
˙WD = −Q−1
D (ZDarT + σDWD) (9)
˙WC = −Q−1
C (ZCvrT + σCWC) (10)
˙Wg = −Q−1
g (ZgrT + σgWg) (11)
where QD ∈ Rn2βD×n2βD , QC ∈ Rn2βC×n2βC , and Qg ∈Rnβg×nβg are a tunable diagonal matrix with positive diagonalentries, and σ(.) are positive numbers.
Theorem 1: Using the control law of Eqn. (8) and the updatelaws of Eqns (9), (10), and (11) results in uniform ultimateboundedness of the closed loop system.
Proof: See [39].
III. MAIN RESULTS
This section develops the robust function approximationtechnique (RFAT) controller. Eqn. (1) is rewritten usingEqns. (5), (6), and (7) to give the open loop dynamics
Dr + Cr +Da+ Cv + g = τ (12)
We use Eqn. (3) to rewrite Eqn. (12) as
Dr + Cr +WTDZDa+WT
CZCv
+WTg Zg + εDa+ εCv + εg = τ (13)
We suppose that the weight matrices WD, WC , and Wg as wellas the approximation errors εD, εC , and εg are uncertain. Thismeans that there exists WoD ∈ Rn2βD×n, WoC ∈ Rn2βC×n,Wog ∈ Rnβg×n, and ψD, ψC , ψg, ωD, ωC ∈ R+ such that
‖WD‖ = ||WoD −WD|| ≤ ψD (14)‖WC‖ = ||WoC −WC || ≤ ψC (15)‖Wg‖ = ||Wog −Wg|| ≤ ψg (16)
Letx(t) =
[q(t)q(t)
](17)
xd(t) =
[qd(t)qd(t)
]. (18)
Since D(q(t)), C(q(t), q(t)), and g(q(t)) are continuous onq(t) and q(t) (or x(t)), Eqn. (3) implies that εD, εC , and εgare also continuous on x(t). Hence, given ‖x‖ < ∆ where ∆is a positive number, we have
supt≥0‖εD(t)‖ < ωD (19)
supt≥0‖εC(t)‖ < ωC (20)
supt≥0‖εg(t)‖ < ωg. (21)
We define the control law as
τ = WTDZDa+ WT
CZCv+ WTg Zg−ωDa−ωCv−Kr (22)
where
WD = WoD + δWD (23)WC = WoC + δWC (24)Wg = Wog + δWg (25)
The additional control terms δWD, δWC , and δWg willbe defined later in this section. We note that the controllaw of Eqn (22) is defined in terms of the fixed nominalweight matrices WoD, WoC , and Wog . In contrast to theAFAT control strategy, these weight matrices are not updatedor changed in time. This gives the advantage of avoidingdrifts in the estimate of the weight matrices, which is oneof the drawbacks of the AFAT controller that was addressedusing σ modification [25], [33]. We also note that accordingto the Stone-Weierstrass theorem, there exist different weightmatrices that yield good approximation for different referencetrajectories. However, the use of a nominal weight matrixcan yield desirable performance if the uncertainty boundsare not violated. This implies that good performance can

4 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
be maintained if the difference between the nominal weightmatrix and the true weight matrix lies within the uncertaintybound (see Eqns. (14), (15), and (16)).
Substituting Eqn. (22) into Eqn. (13),
Dr+Cr+WTDZDa+WT
CZCv+WTg Zg + εDa+ εCv+ εg
= WTDZDa+ WT
CZCv + WTg Zg − ωDa− ωCv −Kr
(26)
Eqn. (26) is rearranged to give
Dr+Cr+Kr =[WTD −WT
D
]ZDa+
[WTC −WT
C
]ZCv
+[WTg −WT
g
]Zg − ωDa− εDa− ωCv − εCv − εg (27)
Using Eqns. (23), (24), and (25), Eqn. (27) is rewritten to givethe closed loop dynamics
Dr+Cr+Kr =[WTD + δWT
D
]ZDa+
[WTg + δWT
g
]Zg
+[WTC + δWT
c
]ZCv − ωDa− εDa− ωCv − εCv − εg
(28)
In hindsight, we select continuous switching laws for theadditional control terms δWT
D , δWTC , and δWT
g as
δWTD =
−ψD raTZT
D
‖raTZTD‖
if ‖raTZTD‖ > µD
−ψD raTZTD
µDif ‖raTZTD‖ ≤ µD
(29)
δWTC =
−ψC rvTZT
C
‖rvTZTC‖
if ‖rvTZTC‖ > µC
−ψC rvTZT
C
µCif ‖rvTZTC‖ ≤ µC
(30)
δWTg =
−ψg
rZTg
‖rZTg ‖
if ‖rZTg ‖ > µg
−ψgrZT
g
µgif ‖rZTg ‖ ≤ µg
(31)
where µD, µC , µg ∈ R+ are dead zone parameters, whichalleviate control signal chattering.
Remark 2: Note that in contrast to traditional sliding modecontrol and the exact regressor used in [7], we represent time-varying uncertainties as finite combinations of basis functions.Similar to sliding mode control, the amount of parameterperturbation and disturbance the controller can handle arerelated to the uncertainty bounds. Higher bounds might yieldbetter robustness, but can also induce unwanted chattering.Additionally, higher dead zone values minimize control signalchattering but degrade tracking accuracy. In practice, the deadzone values can be manually set to high values and thenreduced until the desired tracking performance is achievedwith acceptable chattering.
We now present the following lemma that will aid in thestability analysis of the RFAT controller.
Lemma 1: If the switching laws of Eqns. (29), (30), and(31) are used, then the following holds:
rT[WTD + δWT
D
]ZDa ≤
0 if ‖raTZTD‖ > µD
ψDµD
4 if ‖raTZTD‖ ≤ µD
rT[WTC + δWT
C
]ZCv ≤
0 if ‖rvTZTC‖ > µC
ψCµC
4 if ‖rvTZTC‖ ≤ µC
rT[WTg + δWT
g
]Zg ≤
0 if ‖rZTg ‖ > µg
ψgµg
4 if ‖rZTg ‖ ≤ µgProof: See Appendix A.
For the stability analysis, the following candidate Lyapunovfunction is selected:
V =1
2rTDr + qTΛKq = eTAe (32)
where
e = x− xd =
q˙q
(33)
andA =
[12ΛDΛ + ΛK 1
2ΛD12DΛ 1
2D
]. (34)
For ‖x‖ < ∆, we have
λA(Λ,K) > λmax(A) ≥ λmin(A) > λA(Λ,K) > 0 (35)
where λA(., .) and λA(., .) are positive functions of Λ and K.Taking the time derivative of Eqn. (32),
V = rTDr +1
2rT Dr + 2qTΛK ˙q (36)
Evaluating Eqn. (36) along the closed loop trajectory ofEqn. (28)
V = rT[WTD + δWT
D
]ZDa+ rT
[WTC + δWT
c
]ZCv
+rT[WTg + δWT
g
]Zg +
1
2rT[D − 2C
]r
−rTωDa− rT εDa− rTωCv − rT εCv − rT εg+2qTΛK − rTKr (37)
Using Property 2, Eqn. (37) reduces to
V = rT[WTD + δWT
D
]ZDa+ rT
[WTC + δWT
c
]ZCv
+rT[WTg + δWT
g
]Zg − rTωDa− rT εDa
−rTωCv − rT εCv − rT εg + 2qTΛK ˙q − rTKr(38)
Substituting Eqn. (7) into Eqn. (38),
V = rT[WTD + δWT
D
]ZDa+ rT
[WTC + δWT
c
]ZCv
+ rT[WTg + δWT
g
]Zg − rT εg − rTωDa− rT εDa
− rTωCv − rT εCv − qTΛKΛq − ˙qTK ˙q (39)

EBEIGBE et al.: ROBUST REGRESSOR-FREE CONTROL OF RIGID ROBOTS USING FUNCTION APPROXIMATIONS 5
Defining
Φ =
ΛKΛ 0
0 K
(40)
where Φ is a positive definite matrix, Eqn. (39) becomes
V = rT[WTD + δWT
D
]ZDa+ rT
[WTC + δWT
c
]ZCv
+ rT[WTg + δWT
g
]Zg − rT εg − rTωDa− rT εDa
− rTωCv − rT εCv − eTΦe (41)
Using Lemma 1, Eqn. (41) reduces to
V ≤ ψDµD4
+ψCµC
4+ψgµg
4− rT εg − rTωDa
− rT εDa− rTωCv − rT εCv − eTΦe (42)
Using the relationships
λmin(Φ)‖e‖2 ≤ eTΦe ≤ λmax(Φ)‖e‖2 (43)−rTωDa ≤ −ωD‖rT ‖‖a‖ (44)−rTωCv ≤ −ωC‖rT ‖‖v‖ (45)−rT εDa ≤ ‖rT ‖‖εD‖‖a‖ ≤ ωD‖rT ‖‖a‖ (46)−rT εCv ≤ ‖rT ‖‖εC‖‖v‖ ≤ ωC‖rT ‖‖v‖ (47)
−rT εg = eT
−Λεg
−εg
≤ ‖e‖η (48)
whereη =
∣∣∣∣∣∣∣∣[ΛI]∣∣∣∣∣∣∣∣ωg (49)
and λmin(Φ) and λmax(Φ) denote the the minimum and max-imum eigenvalue respectively of the positive definite matrixΦ, we write Eqn. (42) as
V ≤ E − ‖e‖2λmin(Φ) + ‖e‖η (50)
whereE =
ψDµD + ψCµC + ψgµg4
Using the Cauchy inequality for ‖e‖η in Eqn. (50), we have
V ≤ −λmin(Φ)‖e‖2 +λmin(Φ)
2‖e‖2
+1
2λmin(Φ)η2 + E
= −λmin(Φ)
2‖e‖2 +
1
2λmin(Φ)η2 + E (51)
Eqn. (51) implies that V < 0 if
‖e‖ >
[η2
λ2min(Φ)
+2E
λmin(Φ)
] 12
=: δ (52)
Let S(δ) denote the smallest level set of V containing B(δ),the ball of radius δ. Let B(r1) denote the smallest ballcontaining S(δ). All solutions of the closed loop system areuniformly ultimately bounded (UUB) with respect to B(r1).All trajectories will reach the boundary of S(δ) and willeventually enter the ball B(r1) since V is negative definiteoutside the set S(δ).
We have
λA‖e‖2 ≤ λmin(A)‖e‖2 ≤ V ≤ λmax(A)‖e‖2 ≤ λA‖e‖2.(53)
From (51) and (53),
V ≤ −λmin(Φ)
2λAV +
1
2λmin(Φ)η2 + E. (54)
Let
α =λmin(Φ)
2λA. (55)
According to the comparison lemma in [40], from (54) wehave
V ≤ exp(−αt)V (0) +1
α
(1
2λmin(Φ)η2 + E
)(56)
From (53) and (56),
‖e‖2 ≤ exp(−αt)λAλA‖e(0)‖2 +
1
αλA
(η2
2λmin(Φ)+ E
)= exp(−αt)λA
λA‖e(0)‖2 + δ2. (57)
Theorem 2: If there exist ∆ > ∆0 ≥ ∆d > 0 such that for‖x(0)‖ < ∆0 and ‖xd‖ < ∆d, and Λ and K are chosen suchthat √
λAλA
(∆0 + ∆d)2 + δ2 + ∆d < ∆ (58)
then using the switching laws of Eqns. (29), (30), and (31), theRFAT closed loop system dynamics of Eqn. (28) is uniformlyultimately bounded.
Proof: First, we show that x remains in the set ‖x‖ < ∆for t ≥ 0. We will prove it by contradiction. Assume that xexceeds the set ‖x‖ < ∆. Since x is continuous with respectto t, there exists t1 > 0 such that ‖x(t)‖ < ∆ for 0 ≤ t < t1and ‖x(t1)‖ = ∆. Then, (21) becomes
supt1≥t≥0
‖εg(t)‖ ≤ ωg. (59)
Similarly, since A is a function of D(q), (35) becomes
λA(Λ,K) ≥ λmax(A) ≥ λmin(A) ≥ λA(Λ,K) > 0 (60)
for t1 ≥ t ≥ 0. Thus, (48) and (53) still hold for t1 ≥ t ≥ 0.As a result, (57) holds for t1 ≥ t ≥ 0. From (57), we have
‖x‖ = ‖e+ xd‖ ≤ ‖e‖+ ‖xd‖
<
√exp(−αt)λA
λA‖e(0)‖2 + δ2 + ∆d
<
√λAλA
(∆0 + ∆d)2 + δ2 + ∆d
< ∆ (61)
for t1 ≥ t ≥ 0. This implies ‖x(t1)‖ < ∆, which contradictsour assumption above. Therefore, ‖x‖ < ∆ for t ≥ 0.
Finally, the boundedness of the trajectory error follows theinequality in (57).

6 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
Remark 3: The nominal weight matrices WoD, WoC , andWog , and the uncertainty bounds ψD, ψC , ψg, ωD, and ωCare regarded as tuning parameters. In practice, the uncertaintybounds and optimal nominal values can not be known exactly.However, more accurate values for the tuning parameterscan be found by employing some knowledge of the physicalsystem. In cases where there is no knowledge of the physicalsystem, they can be tuned via trial and error. The approxima-tion error bounds can intuitively be minimized in the range0 < ω(.) < 1 by using a sufficient number of basis functions.Good controller performance with specific uncertainty boundsare a direct consequence of not violating those bounds, whilethe converse is the case for poor performance. For nonlinearsystems, guaranteeing that uncertainty bounds will not beviolated is difficult in practice. Analytical solutions that ensurethe upper bounds will not be violated are not studied in thispaper but recent work on adaptive sliding mode control thatcan deal with unknown uncertainty bounds [41]–[44] can beemployed in future work.
Remark 4: Theorem 2 shows that with appropriate choiceof parameters K and Λ, along with the stated assumptions, thestate variable x remains in a given open set ‖x‖ < ∆, and thetrajectory error is uniformly ultimate bounded for all t ≥ 0.
IV. SIMULATION RESULTS
In this section, the RFAT controller is verified via computersimulations on a rigid robot. We compare the performance ofthe RFAT controller against the AFAT controller, adaptive pas-sivity (AP) controller, and the robust passivity (RP) controller.
A. Robot ModelThe robot model used as a testbed for controller imple-
mentation is a six-DOF PUMA500 robot. Althought it has sixDOFs, only three DOFs are implemented in the simulation:q1, q2, and q3 as shown in [45]. The robot link parametersthat characterize the PUMA500 robot at the Cleveland StateUniversity Controls, Robotics, and Mechatronics Laboratoryare b = 0.410 m, d1 = 0.666 m, d2 = 0.243 m, d3 = 0.093 m,and a2 = 0.432 m. The dynamic equation of the robot canbe obtained via the Euler-Lagrange method [46]. The actualrobot dynamics derived with the Euler-Lagrange method isused to simulate the plant. In the AP and RP controllerimplementation, a known regressor matrix and an uncertainparameter vector is used. In the AFAT and RFAT controllerimplementation, finite linear combinations of orthonormalbasis functions are used in place of the regressor matrix /parameter vector. The regressor matrix and parameter vectorof the PUMA500 robot are available at [47].
B. Overview of Robust Passivity Control and Simulation Pa-rameters
The robust passivity (RP) controller is a regressor-basedcontrol method [7]. It uses a known regressor matrix and anuncertain parameter vector. The uncertain parameter vector isadjusted via a continuous switching law. Linearly parameter-izing Eqn. (12) gives
Dr + Cr + Y (q, q, v, a)θ = τ (62)
where Y ∈ R3×l is the known regressor matrix and θ ∈ Rl isthe parameter vector. Note that Y differs from Yr in Eqn. (2)because Y is independent of joint acceleration while Yr isdependent on joint acceleration [29]. The independence of Yfrom joint acceleration holds true for all robots that can bemodeled using the Euler-Lagrange equation of motion. Moredetails can be found in [7]. The control law is given as
τ = Y θ −Kr (63)
where θ = θ0 + δθ, θ0 ∈ Rl is the nominal parameter vector,and l = 10 for the PUMA500 robot described in Section IV-A.With the parametric uncertainty bounded by ρ ∈ R+ such that‖θ − θ‖ ≤ ρ, the additional control term δθ is defined by thecontinuous switching law
δθ =
−ρ Y T r‖Y T r‖ if ‖Y T r‖ > Υ
−ρYT rΥ if ‖Y T r‖ ≤ Υ
(64)
where Υ ∈ R+ is a deadzone parameter. The RP controller pa-rameters were tuned manually to give good controller perfor-mance. The deadzone was selected as Υ = 0.1, the uncertaintybound was selected as ρ = 10, and the controller gains wereselected as K = diag
[10 20 10
]and Λ = diag
[2 10 2
](see Eqn. (7)). The nominal parameter vector was selected as
θ0 =[2.9625 1.5893 0.0421 0.3369 −0.1171
7.6163 1.1870 −0.7620 7.6547 39.6898]T
C. Overview of Adaptive Passivity Control and SimulationParameters
The adaptive passivity (AP) controller is a regressor-basedcontrol method [7]. It also uses a known regressor matrix andan uncertain parameter vector. The uncertain parameter vectoris adjusted via an update law. The control law is the same asEqn. (63). The update law is given as
˙θ = −Γ−1Y T r (65)
where Γ ∈ Rl×l is tunable diagonal matrix with positivediagonal entries, and l = 10. The AP controller parameterswere tuned manually to give good controller performance. TheAP controller gains were selected as K = diag
[10 20 10
]and Λ = diag
[2 10 2
]. The update law gain was selected
as Γ = 60 × I10. The initial parameter vector was chosen asθ(0) = 0 ∈ R10.
D. RFAT Controller Simulation Parameters
The RFAT controller was manually tuned to give goodcontroller performance. The controller gains were selectedas K = diag
[10 20 10
]and Λ = diag
[2 10 2
]. The
uncertainty bounds were selected as ψD = ψC = ψg = 5, andωD = ωC = 0.2. The 20-term Fourier series is selected as thebasis function such that
zij =[1 cos(w2t) sin(w2t) cos(w3t) sin(w3t)
cos(w4t) sin(w4t) · · · cos(w20t) sin(w20t)]T ∈ R20

EBEIGBE et al.: ROBUST REGRESSOR-FREE CONTROL OF RIGID ROBOTS USING FUNCTION APPROXIMATIONS 7
for i, j ∈ [1, 3] where wk = 2kπT for k ∈ [2, 20]. The value
for T was chosen as T = π. Based on our experience, werecommend tuning the nominal weight matrix of the gravityvector, as well as the nominal weight matrices that correspondto the diagonal of the inertia and Coriolis matrices respectively,while setting all other elements of the nominal matrices tozero. This process enhances the simplicity in selection ofthe nominal weight matrices. However, we note that theuse of different nominal weight matrices while keeping theuncertainty bounds fixed can affect the performance of theRFAT controller. The difference in controller performance willmainly be observed in the transient response.
The nominal weight matrices and basis function matriceswere arbitrarily selected. The nominal weight matrices were
WoDij = WoCij = [0.01 0 · · · 0]T ∈ R20 ∀i = j
WoDij = WoCij = [0 0 · · · 0]T ∈ R20 ∀i 6= j
Wog1 = Wog3 = [0.01 0 · · · 0]T ∈ R20
Wog2 = [−40 0 · · · 0]T ∈ R20
for (i, j) ∈ [1, 3]. The dead zone values for the switching lawsof the RFAT controller were selected as µD = µC = µg = 0.5,and ωD = ωC = 0.2.
E. AFAT Controller Simulation Parameters
The AFAT controller was manually tuned to give goodcontroller performance. The controller gains were selected asK = diag
[10 20 10
]and Λ = diag
[2 10 2
]. The basis
functions used were the same as the ones used in Section IV-D.The update law gains were selected as Q−1
D = Q−1C = 5×I180,
and Q−1g = 150 × I60. The initial weight matrices were
selected as WDij(0) = WCij
(0) = Wgi(0) = 0 ∈ R20 for(i, j) ∈ [1, 3].
F. Simulation
We note that the gains K and Λ are common to the AP,RP, AFAT, and RFAT controllers. The gain values were keptthe same to get a good basis for comparing the controllerperformances (see Sections IV-B, IV-C, IV-D, and IV-E).
Simulation 1
Here, we use the periodic reference trajectories q1d =sin(2t), q2d = 0.25 sin(2t), and q3d = 0.5 sin(2t) − π
2 . Wesimulate the AP, RP, AFAT, and RFAT controllers on thenominal robot model when zero initial tracking errors are used.
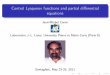
Figures 1 and 2 show the controller tracking performanceand control signals respectively on the nominal robot modelwhen zero initial tracking errors were used. We see goodtracking by the AP, RP, AFAT, and RFAT controllers withreasonable control signals. Although their transient responsesdiffer, the RFAT controller had the least tracking error, witha root-mean-square error (RMSE) error value of 0.014 rad,0.003 rad, and 0.004 rad for q1, q2, and q3 respectively. Wenote that in steady-state, the tracking errors of the RP, AFAT,and RFAT controllers never really converge to zero, but staybounded within a small region around 0 rad. This is because
0 5 10 15-0.2
0
0.2
0.4
q 1 err
or (
rad)
RFAT (Red Line) RP (Blue Line) AFAT (Black Line) AP (Magenta Line)
0 5 10 15-0.05
0
0.05
q 2 err
or (
rad)
0 5 10 15
Time (s)
-0.1
0
0.1
0.2
q 3 err
or (
rad)
Fig. 1. Simulation 1: The error trajectories when the nominal robot model isused with zero initial tracking errors.
0 5 10 15-100
0
100
200
1 (
Nm
)
0 5 10 15-100
0
100
2 (
Nm
)
0 5 10 15
Time (s)
-100
0
100
3 (
Nm
)
RFAT (Red Line) RP (Blue Line) AFAT (Black Line) AP (Magenta Line)
Fig. 2. Simulation 1: The control signals when the nominal robot model isused with zero initial tracking errors.
of the uniform ultimate boundedness of the RP, AFAT, andRFAT controllers (see [7], and Theorems 1 and 2 respectively).Over time, the steady-state tracking errors for the AP controllershould converge to a zero value because of the AP controller’sglobal convergence property.
We show the RFAT controller approximation error for therobot’s inertia matrix, Coriolis matrix, and gravity vector inFig. 3. We note that the approximation errors of the weightmatrices are not given because the actual weight matricesare unknown. However, regression methods could be usedto evaluate the weight matrices that correspond to the robotdynamics. We see that the estimates, though periodic due to theperiodic nature of the reference trajectories, do not convergeto their true values but remain bounded. We hypothesize thatthe simultaneous approximation of the inertia matrix, Coriolismatrix, and gravity vector affects the convergence of the es-timates since the RFAT controller design prioritizes reference

8 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
0 5 10 15
-10
-5
0
5
10
(1,1
)D error C error g error
0 5 10 15
-10
-5
0
5
10
(1,2
)
0 5 10 15
-5
0
5
(1,3
)
0 5 10 15-10
-5
0
5
10
(2,1
)
0 5 10 15-20
-15
-10
-5
0
5
(2,2
)
0 5 10 15
-5
0
5
(2,3
)
0 5 10 15
Time (s)
-5
0
5
(3,1
)
0 5 10 15
Time (s)
-2
0
2
(3,2
)
0 5 10 15
Time (s)
-2
-1
0
1
2
(3,3
)
Fig. 3. Simulation 1: The RFAT controller inertia matrix, Coriolis matrix,and gravity vector approximation errors.
0 5 10 15-1
0
1
2
3
Val
ue
0 0.05 0.1 0.15 0.2-1
0
1
2
3
Val
ue
0 5 10 15
Time (s)
-50
-40
-30
-20
-10
0
10
0 0.05 0.1 0.15 0.2
Time (s)
-50
-40
-30
-20
-10
0
10
Fig. 4. Simulation 1: The UUB radius δ, error norm ‖e‖, and Lyapunovfunction derivative V when the nominal robot model is used with zero initialtracking errors.
trajectory tracking over accurate parameter estimation.
Motivated by Remark 3, we use that 20 basis functions togive sufficiently good approximations. Therefore, using ωg =0.2 helps us evaluate η in Eqn. (48), and the Lyapunov functionderivative V and the UUB radius δ in Eqns. (50) and (52)respectively. The UUB radius was calculated as δ = 0.5625.Figure 4 shows the UUB radius and the Lyapunov functionderivative. The left figures show their values over the entire15 s simulation, while the right figures show their values overthe 0 ≤ t ≤ 0.2 s window. We see that ‖e‖ enters the ±δboundary and does not leave it. We also see that V becomespositive the exact moment ‖e‖ enters the ±δ boundary at t =0.056 s.
Simulation 2
Here, we test the robustness of the AP, RP, AFAT, and RFATcontrollers to a time-varying load on the third link of therobot. We use the periodic reference trajectories q1d = sin(2t),q2d = 0.25 sin(2t), and q3d = 0.5 sin(2t) − π
2 . We use zeroinitial tracking errors to simulate the nominal robot model,while keeping the all controller parameters unchanged. Weadd an unknown time-varying load to the third link of therobot after the AP, RP, AFAT, and RFAT controllers have allreached steady-state. We vary the mass of the third link usingthe equation
m3 = m3o + 5(1− cos(5t)) ∀t > 5
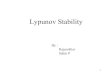
where m3o is the nominal mass of the third link. Figure 5shows the tracking performance when the time-varying loadis added to the third link of the robot. We see that whenthe time-varying load is added to the robot’s third link after5 s, the RFAT controller maintains good reference trajectorytracking while AP, RP, and AFAT controllers do not give goodperformance. We note that the effect of the time-varying loadis more profound on the robot’s second link, which is evidentby the larger tracking errors of q2 when compared to q1 andq3. Despite the fact that the RP controller is a robust controller,we see that the RP controller gave unsatisfactory performance,especially in q2. This is because the addition of the time-varying load violated the uncertainty bounds of the RP con-troller. Increasing the uncertainty bounds of the RP controllermight yield better tracking but it induces unwanted controlsignal chattering. The AP and AFAT controllers, despite beingadaptive controllers that do not use uncertainty bounds, do notgive satisfactory tracking for all robot joints. This is becausethe update laws of the AP and AFAT controllers can not keepup with the time-varying load. This is in line with one ofthe major drawbacks of adaptive control, which is decreasedperformance when the robot’s parameters change rapidly. Wenote that the AP and AFAT controllers will show improvedperformance when a slower time-varying load is used. Thegood tracking of the RFAT controller in Fig. 5 shows goodrobustness of the RFAT controller when compared to the AP,AFAT, and RP controllers.
Simulation 3
Here, we compare the robustness performance of the RFATcontroller against the RP controller by performing randomparameter perturbations, while keeping the controller parame-ters unchanged. We do not compare them against the AP andAFAT controllers because the AP and AFAT controllers do nothave fixed control structures like the RFAT and RP controllers.We evaluate the performance of the RFAT and RP controllersover 100 Monte Carlo simulations, where each simulationincludes a random perturbation of the robot parameters fromtheir nominal values in the range [−30%,+30%]. We evaluatecontroller robustness performance by computing the trackingRMSE and root-mean-square (RMS) control signal values ofeach joint.
Figure 6 shows the RFAT and RP controller tracking per-formance over 100 Monte Carlo simulations. We see that the

EBEIGBE et al.: ROBUST REGRESSOR-FREE CONTROL OF RIGID ROBOTS USING FUNCTION APPROXIMATIONS 9
0 5 10 15-0.2
0
0.2
0.4
q 1 err
or (
rad)
RFAT (Red Line) RP (Blue Line) AFAT (Black Line) AP (Magenta Line)
0 5 10 15-0.1
-0.05
0
0.05
q 2 err
or (
rad)
0 5 10 15
Time (s)
-0.2
0
0.2
0.4
q 3 err
or (
rad)
Fig. 5. Simulation 2: The error trajectories when the mass of the third linkof the robot is varied .
10 20 30 40 50 60 70 80 90 1000
0.05
0.1
q 1 RM
SE
(rad
)
RFAT (Red Line) RP (Blue Line)
10 20 30 40 50 60 70 80 90 1000
0.1
0.2
q 2 RM
SE
(rad
)
10 20 30 40 50 60 70 80 90 100
Simulation Number
0
0.5
q 3 RM
SE
(rad
)
Fig. 6. Simulation 3: Monte Carlo results of the RFAT and RP controllersshowing RMS trajectory tracking errors when the robot parameters arerandomly perturbed from their nominal values in the range [−30%,+30%].
RFAT controller performs better than the RP controller bygiving lower tracking RMSE for all three joints of the robot.The RFAT controller tracking RMSE (mean ± one standarddeviation) are 0.0118 ± 0.0027 rad, 0.0032 ± 0.0009 rad,and 0.0028 ± 0.0004 rad for q1, q2, and q3 respectively.The RP controller tracking RMSE (mean ± one standarddeviation) are 0.0253 ± 0.0121 rad, 0.0285 ± 0.0353 rad,and 0.0928 ± 0.1138 rad for q1, q2, and q3 respectively. Thetracking RMSE of the RFAT controller in Fig. 6 demonstratesgood robustness of the RFAT controller. Figure 7 shows theRFAT and RP controller RMS control signal values over 100Monte Carlo simulations. The RMS control signal values forboth controllers are reasonable and do not exceed 30 Nm,100 Nm, and 10 Nm for q1, q2, and q3 respectively.
10 20 30 40 50 60 70 80 90 10010
20
30
1 R
MS
(Nm
)
RFAT (Red Line) RP (Blue Line)
10 20 30 40 50 60 70 80 90 1000
50
100
2 R
MS
(Nm
)
10 20 30 40 50 60 70 80 90 100
Simulation Number
5
10
3 R
MS
(Nm
)
Fig. 7. Simulation 3: Monte Carlo results of the RFAT and RP controllersshowing RMS control signal values when the robot parameters are randomlyperturbed from their nominal values in the range [−30%,+30%].
V. EXPERIMENTAL RESULTS
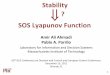
The robot used is the six degree-of-freedom PUMA500robot, but only the first three degrees of freedom are usedfor the experimental verification. The three joints of thePUMA500 robot are controlled by brushless DC motors. Themotors are coupled with incremental encoders that captureposition and velocity data from the robot joints. A servoamplifier is used as a power source to deliver the voltagecommanded by the controller to the motors. For a controlscheme implementation, input constants are used to capture theoverall amplifier gains and motor gear ratios for each joint. Theinput constants convert torque to voltage and are 0.0543 Nm/V,0.0806 Nm/V, and 0.1078 Nm/V for q1, q2, and q3 respectively.Real-time instrumentation and control is handled by a dSPACEDS-1202 system and associated software with a samplingfrequency of 1 kHz. The experimental setup is shown in Fig. 8.Here, we validate the RFAT controller via experimental testson a real-world robotic system by comparing it with the RPand AFAT controllers.
A. RFAT Controller Parameters
The controller gains were manually tuned online to give aslittle control signal chattering as possible while maintaininggood reference trajectory tracking and reasonable controlsignal magnitudes. The dead zone values for the switchinglaws of the RFAT controller were µD = µC = µg = 0.5 (seeEqns. (29), (30) , and (31)). The controller gains were selectedas K = diag[15 20 15] and Λ = diag[2 10 2].
For the RFAT controller implementation, we use the 10-term Fourier series as the matrix of basis function (SeeSection IV-D). We note that the number of basis functionis βD = βC = βg = 10. We use the same nominalweight matrices Wo(·) as the ones used in the simulation (SeeSection IV-D).
We note that although a larger number of basis functionsmight yield better performance, computational issues such as

10 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
Fig. 8. Experimental setup for PUMA500 robot control. The setup comprises:(1) PUMA500 robot, (2) dSPACE MicroLabBox DS-1202, (3) Encoder inputconversion box, and (4) PC for controller implementation.
larger matrices and the need for larger memory arise duringreal-time implementation. This is why a trade-off betweenaccuracy and computational efficiency is favorable during real-time implementation.
The uncertainty bounds were manually tuned online toreduce chattering and were selected as ψD = 2, ψC = ψg = 3,and ωD = ωC = 0.2.
B. RP Controller Parameters
We use the same regressor matrix and nominal parametervector (see Section IV-B) for the controller implementation.The controller gains were manually tuned online to give aslittle control signal chattering as possible while maintaininggood reference trajectory tracking and reasonable control sig-nal magnitudes. The controller gains were selected as K andΛ = diag[2 10 2]. The deadzone was selected as Υ = 0.4and the uncertainty bound was selected as ρ = 6. We notethat dead zone values below 0.4 induce unwanted chatteringin our experiment.
C. AFAT Controller Parameters
We use the same basis function and initial weight matrices(see Section IV-E) for the controller implementation. Thecontroller gains were manually tuned online to give goodperformance. The controller gains were selected as K =Λ = diag[2 10 2]. The update law gains were selected asQ−1D = Q−1
C = 0.1× I180, and Q−1g = 1× I60.
D. Experiment
We note that the gains K and Λ are common to the RP andRFAT controllers. The gain values were kept the same to geta good basis for comparing the controller performances.
0 1 2 3 4 5 6-0.2
0
0.2
0.4
q1 e
rror
(ra
d)
RFAT Controller (Red Line) RP Controller (Blue Line) AFAT Controller (Black Line)
0 1 2 3 4 5 6-0.15
-0.1
-0.05
0
0.05
q2 e
rror
(ra
d)
0 1 2 3 4 5 6
Time (s)
-0.2
-0.1
0
0.1
0.2
q3 e
rror
(ra
d)
Fig. 9. Experiment 1: Trajectory tracking performance when zero initialtracking errors were used.
Experiment 1
Here, we use the periodic reference trajectories q1d =0.5 sin(2t), q2d = 0.25 sin(2t), and q3d = 0.5 sin(2t) − π
2to evaluate the performance of the RFAT, RP, and AFAT con-trollers. We use zero initial tracking errors for this experiment.
Figure 9 shows the trajectory tracking performance forjoints q1, q2, and q3 respectively. The RFAT controller gavebetter tracking performance than the RP and AFAT controllers.The tracking RMSE values for the RFAT controller were0.0243 rad, 0.0063 rad, and 0.0192 rad for q1, q2, and q3
respectively. The tracking RMSE values for the RP controllerwere 0.0256 rad, 0.0186 rad, and 0.0383 rad for q1, q2, andq3 respectively. The tracking RMSE values for the AFATcontroller were 0.1557 rad, 0.0499 rad, and 0.0973 rad forq1, q2, and q3 respectively. We note that although the AFATcontroller gave the worst tracking performance, the trackingerrors eventually reduce as time progresses beyond the 6 stime shown in the figure.
Figure 10 shows the control signals of the RFAT, RP,and AFAT controllers. We see that the control signals arereasonable with little chattering. We note that the RFAT controlsignals remained within the amplifier saturation limits of ±5 Vfor q1, ±10 V for q2, and ±5 V for q3. The RP controlremained within the amplifier saturation limits of ±5 V forq1, ±10 V for q2, but exceeded the amplifier saturation limitof ±5 V for q3 during the transient response. However, thisdid not cause any instabilities in the robotic system. We notethat increasing the uncertainty bound Υ of the RP controllerinduces high frequency dynamics of the robot, leading tounwanted control signal chattering. We also note that theoscillatory nature of the AFAT control signal during thetransient response, if large enough, can destabilize the system.This was why higher update gain values could not be used toimprove the transient performance of the AFAT controller.

EBEIGBE et al.: ROBUST REGRESSOR-FREE CONTROL OF RIGID ROBOTS USING FUNCTION APPROXIMATIONS 11
0 1 2 3 4 5 6-2
0
2
4
u1 (
V)
RFAT Controller (Red Line) RP Controller (Blue Line) AFAT Controller (Black Line)
0 1 2 3 4 5 6-10
-5
0
5
u2 (
V)
0 1 2 3 4 5 6
Time (s)
-5
0
5
10
u3 (
V)
Fig. 10. Experiment 1: Control signals when zero initial tracking errors wereused.
Experiment 2
Here, we evaluate the performance of the RFAT and RP con-trollers by using a reference trajectory that has a time-varyingphase and a regulation phase. The reference trajectories wereselected as
q1d =
0.5 sin(2t) if 0 ≤ t < 2
0.5 sin(4) if t ≥ 2
q2d =
0.25 sin(2t) if 0 ≤ t < 2
0.25 sin(4) if t ≥ 2
q3d =
0.5 sin(2t)− π
2 if 0 ≤ t < 2
0.5 sin(4)− π2 if t ≥ 2
Figure 11 shows the reference trajectory tracking performancefor joints q1, q2, and q3 respectively when the RFAT and RPcontrollers were implemented. We see that the RFAT controlleralso gave better tracking performance when compared to theRP controller. The tracking RMSE for the RFAT controllerwere 0.0143 rad, 0.0043 rad, and 0.0249 rad for q1, q2, and q3
respectively. The tracking RMSE for the RP controller were0.0153 rad, 0.0262 rad, and 0.0669 rad for q1, q2, and q3
respectively. We see that the RFAT and RP controllers gavereasonable control signals in Fig. 12.
Experiment 3
Here, we use the same reference trajectories as Experi-ment 1. We evaluate the RFAT and RP controller performanceby using nonzero initial tracking errors. We use the initialconditions −0.2, and −1.2 for q1, q2, and q3 respectively.Although that both controllers give good tracking despitethe use of poor initial conditions for all joints. The RFATcontroller gave the least tracking error of 0.0511, 0.0190,and0.0615 for q1, q2, and q3 respectively. The good referencetrajectory tracking performance of the RFAT controller, whichdoes not need the computation of a regressor matrix andparameter vector, shows the practical applicability of the RFAT
0 1 2 3 4 5 6-0.05
0
0.05
0.1
q 1 e
rror
(ra
d)
RFAT Controller (Red Line) RP Controller (Blue Line)
0 1 2 3 4 5 6-0.04
-0.02
0
0.02
0.04
q 2 e
rror
(ra
d)
0 1 2 3 4 5 6
Time (s)
-0.1
-0.05
0
0.05
q 3 e
rror
(ra
d)
Fig. 11. Experiment 2: Trajectory tracking performance when zero initialtracking errors were used.
0 1 2 3 4 5 6-2
0
2
4
u1 (V
)
RFAT Controller (Red Line) RP Controller (Blue Line)
0 1 2 3 4 5 6-5
0
5
u2 (V
)
0 1 2 3 4 5 6
Time (s)
-5
0
5
10
u3 (V
)
Fig. 12. Experiment 2: Control signals when zero initial tracking errors wereused.
controller to robots, especially in scenarios where the dynamicequation of a robot is unavailable or is too costly to develop.A summary of the experimental results is shown in Table I.
VI. DISCUSSION AND CONCLUSION
In this paper, we developed a novel controller called therobust function approximation technique (RFAT) controller.The RFAT controller, which uses a fixed control law, wasdesigned to give desirable performance over a given rangeor uncertainties if the uncertainty bounds are not violated.The uniform ultimate boundedness of the RFAT controller wasshown via detailed stability analysis. This is the first time arobust controller that eliminates the need for update laws hasbeen developed using the FAT framework.
The performance of the RFAT was verified on a three-DOFPUMA500 robot via computer simulations. In the simulation,the RFAT controller was evaluated and compared with the

12 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
TABLE ISUMMARY OF EXPERIMENTAL RESULTS
q1 RMSE (rad) q2 RMSE (rad) q3 RMSE (rad)
Experiment 1RP controller 0.0256 0.0186 0.0383AFAT controller 0.1557 0.0499 0.0973RFAT controller 0.0243 0.0063 0.0192
Experiment 2 RP controller 0.0153 0.0262 0.0669RFAT controller 0.0143 0.0043 0.0249
Experiment RP controller 0.0570 0.0287 0.0728RFAT controller 0.0511 0.0190 0.0615
0 1 2 3 4 5 6-0.1
0
0.1
0.2
0.3
q 1 err
or (
rad)
RFAT Controller (Red Line) RP Controller (Blue Line)
0 1 2 3 4 5 6-0.3
-0.2
-0.1
0
0.1
q 2 err
or (
rad)
0 1 2 3 4 5 6
Time (s)
-0.4
-0.2
0
0.2
q 3 err
or (
rad)
Fig. 13. Experiment 3: Trajectory tracking performance when nonzero initialtracking errors were used.
AFAT, RP, and AP controllers. We showed that the RFATcontroller gave superior performance over the AFAT, RP, andAP controllers when a fast-varying payload was added to therobot. The RFAT controller also showed superior performanceover the RP controller when the robot parameters were ran-domly perturbed from their nominal values.
The performance of the RFAT was also verified on a three-DOF PUMA500 robot via experimental tests in the Control,Robotics and Mechatronics Lab at Cleveland State University.The experimental results showed that the RFAT controllergave better tracking when compared to the RP controller. Theexperimental tests also showed the ease of tuning the RFATcontroller for real-world robotic applications. We note that theimplementation of the RFAT controller (in simulation and inreal-time) becomes easier when the nominal weight matrix ofthe gravity vector, as well as the nominal weight matrices thatcorrespond to the diagonal of the inertia and Coriolis matricesrespectively are tuned, while setting all other nominal matricesto zero (see Section IV-D).
The RFAT controller is proposed as an alternative to theAFAT controller. The use of switching laws make it easierto improve the transient performance of the RFAT controller.On the other hand, improving the transient response of the
0 1 2 3 4 5 6-5
0
5
u1 (V
)
RFAT Controller (Red Line) RP Controller (Blue Line)
0 1 2 3 4 5 6-10
-5
0
5
u2 (V
)
0 1 2 3 4 5 6
Time (s)
-5
0
5
u3 (V
)
Fig. 14. Experiment 3: Control signals when nonzero initial tracking errorswere used.
AFAT controller might be harder to achieve due to its useof update laws. Higher update law gains might improvethe transient response but can also destabilize the systembecause they induce unwanted oscillations. When comparedto the AFAT controller, the RFAT controller will be the betterchoice for robot control when the uncertainties are not toolarge and bounded, and where guaranteed performance in thepresence of unmodeled dynamics and external disturbances arerequired. Future work could include developing a systematicapproach of optimally selecting the nominal weight matricesand the number of basis functions to improve robustness ofthe controller.
In this paper, we utilized three switching laws to accountfor uncertainties in the inertia matrix, Coriolis matrix, andgravity vector respectively. The use of three switching lawscan be advantageous in scenarios where the uncertainties ordisturbances have a more profound effect on a certain part ofthe robot dynamics, say the Coriolis matrix for instance. Thisallows for a conservative approach to not overcompensate forthe effects of disturbances to atain good performance. Furtherresearch could be done on improving the convergence of theRFAT controller’s estimates, despite the lack of informationabout the dynamic equation of the robot. However, several

EBEIGBE et al.: ROBUST REGRESSOR-FREE CONTROL OF RIGID ROBOTS USING FUNCTION APPROXIMATIONS 13
adaptive FAT controllers in the literature achieve simplicityand reduce computational cost by lumping the unknown dy-namics and approximating them using a single update law [26],[30], [48]. Our future work will involve developing a morecompact form of the RFAT controller by reducing the numberof switching laws to improve computational efficiency, whilemaintaining good robustness. The results in this paper arethe first steps towards developing purely robust FAT-basedcontrollers. Finally, we note that the source code used togenerate the RFAT controller simulation results in this paperare available at [47].
APPENDIX APROOF OF LEMMA 1
The proof for Lemma 1 is divided into three sections. First,we evaluate rT [WT
D + δWTD ]ZDa using the switching law of
Eqn. (29). Second, we evaluate rT [WTC + δWT
C ]ZCv usingthe switching law of Eqn. (30). Third, we evaluate rT [WT
g +δWT
g ]Zg using the switching law of Eqn. (31).
First, we evaluate rT[WTD + δWT
D
]ZDa by using
Eqn. (29). If ‖raTZTD‖ > µD, we have
rT[WTD + δWT
D
]ZDa = rT WT
DZDa− ψDrT raTZTDZDa
‖raTZTD‖(66)
Since the expression rT raTZTDZDa is scalar, we can definethe relations
rT raTZTDZDa = ‖r‖2‖aTZTD‖2 (67)‖raTZTD‖ ≤ ‖r‖‖aTZTD‖ (68)
Rewriting Eqn. (66) using Eqns. (67) and (68) gives
rT[WTD + δWT
D
]ZDa ≤ rT WT
DZDa− ψD‖r‖‖aTZTD‖(69)
Using the fact that
rT WTDZDa ≤ ‖r‖‖WT
D‖‖aTZTD‖ ≤ ψD‖r‖‖aTZTD‖
Eqn. (69) reduces to
rT[WTD + δWT
D
]ZDa ≤ 0 if ‖raTZTD‖ > µD (70)
Alternatively, using Eqn. (29), if ‖raTZTD‖ ≤ µD, we have
rT[WTD + δWT
D
]ZDa = rT
[WTD −
ψDµD
raTZTD
]ZDa
(71)Using the relationships in Eqns. (67) and (68), Eqn. (71)becomes
rT[WTD + δWT
D
]ZDa = rT WT
DZDa−ψDµD‖r‖2‖aTZTD‖2
≤ ψD‖r‖‖aTZTD‖
− ψDµD‖r‖2‖aTZTD‖2 (72)
Defining Ω = ‖r‖‖aTZTD‖, the R.H.S of Eqn. (72) has acritical point at Ω = µD
2 and a local maximum such that
rT[WTD + δWT
D
]ZDa ≤
ψDµD4
if ‖raTZTD‖ ≤ µD (73)
Therefore, from Eqns. (70) and (73),
rT[WTD + δWT
D
]ZDa ≤
0 if ‖raTZTD‖ > µD
ψDµD
4 if ‖raTZTD‖ ≤ µD
Finally, we note that the proof of rT[WTC + δWT
C
]ZCv
and rT[WTg + δWT
g
]Zg follows from the proof of
rT[WTD + δWT
D
]ZDa.
REFERENCES
[1] S. Desa and B. Roth, “Synthesis of control systems for manipulators us-ing multivariable robust servomechanism theory,” International Journalof Robotics Research, vol. 4, no. 3, pp. 18–34, 1985.
[2] J. Y. S. Luh, “Conventional controller design for industrial robots: Atutorial,” IEEE Transactions on Systems, Man, and Cybernetics, no. 3,pp. 298–316, 1983.
[3] K. Kreutz, “On manipulator control by exact linearization,” IEEETransactions on Automatic Control, vol. 34, no. 7, pp. 763–767, 1989.
[4] K. K. D. Young, “Controller design for a manipulator using theory ofvariable structure systems,” IEEE Transactions on Systems, Man, andCybernetics, vol. 8, no. 2, pp. 101–109, 1978.
[5] R. Morgan and U. Ozguner, “A decentralized variable structure controlalgorithm for robotic manipulators,” IEEE Journal on Robotics andAutomation, vol. 1, no. 1, pp. 57–65, 1985.
[6] G. Bartolini and T. Zolezzi, “Variable structure systems nonlinear in thecontrol law,” IEEE Transactions on Automatic Control, vol. 30, no. 7,pp. 681–684, 1985.
[7] M. W. Spong, S. Hutchinson, and M. Vidyasagar, Robot Modeling andControl. Wiley, 2006.
[8] C. Y. Su, T. P. Leung, and Y. Stepanenko, “Real-time implementationof regressor-based sliding mode control algorithm for robotic manipu-lators,” IEEE Transactions on Industrial Electronics, vol. 40, no. 1, pp.71–79, 1993.
[9] Y. Pan and H. Yu, “Composite learning robot control with guaranteedparameter convergence,” Automatica, vol. 89, pp. 398–406, 2018.
[10] W. H. Zhu, H. T. Chen, and Z. J. Zhang, “A variable structure robotcontrol algorithm with an observer,” IEEE Transactions on Robotics andAutomation, vol. 8, no. 4, pp. 486–492, 1992.
[11] V. Azimi, D. Simon, and H. Richter, “Stable robust adaptive impedancecontrol of a prosthetic leg,” in ASME Dynamic Systems and ControlConference, Columbus, Ohio, October 2015.
[12] G. Khademi, H. Mohammadi, H. Richter, and D. Simon, “Optimalmixed tracking / impedance control with application to transfemoralprostheses with energy regeneration,” IEEE Transactions on BiomedicalEngineering, vol. 99, pp. 1–17, 2017.
[13] P. Khalaf, H. Richter, A. Van Den Bogert, and D. Simon, “Multi-objective optimization of impedance parameters in a prosthesis testrobot,” in ASME Dynamic Systems and Control Conference, Columbus,Ohio, October 2015.
[14] J.-H. Shin, K.-B. Park, S.-W. Kim, and J.-J. Lee, “Robust adaptivecontrol for robot manipulators using regressor-based form,” in IEEEInternational Conference on Systems, Man, and Cybernetics, 1994.Humans, Information and Technology, vol. 3, 1994, pp. 2063–2068.
[15] C. P. Bechlioulis and G. A. Rovithakis, “Robust adaptive control offeedback linearizable MIMO nonlinear systems with prescribed perfor-mance,” IEEE Transactions on Automatic Control, vol. 53, no. 9, pp.2090–2099, 2008.
[16] M. Mehdi Fateh, S. Azargoshasb, and S. Khorashadizadeh, “Model-freediscrete control for robot manipulators using a fuzzy estimator,” TheInternational Journal for Computation and Mathematics in Electricaland Electronic Engineering, vol. 33, no. 3, pp. 1051–1067, 2014.
[17] W. Dong and K.-D. Kuhnert, “Robust adaptive control of nonholonomicmobile robot with parameter and nonparameter uncertainties,” IEEETransactions on Robotics, vol. 21, no. 2, pp. 261–266, 2005.
[18] C. Yang, Y. Jiang, Z. Li, W. He, and C.-Y. Su, “Neural control ofbimanual robots with guaranteed global stability and motion precision,”IEEE Transactions on Industrial Informatics, vol. 13, no. 3, pp. 1162–1171, 2017.

14 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
[19] K. Watanabe, J. Tang, M. Nakamura, S. Koga, and T. Fukuda, “A fuzzy-gaussian neural network and its application to mobile robot control,”IEEE Transactions on Control Systems Technology, vol. 4, no. 2, pp.193–199, 1996.
[20] R. J. Lian, “Adaptive self-organizing fuzzy sliding-mode radial basis-function neural-network controller for robotic systems,” IEEE Transac-tions on Industrial Electronics, vol. 61, no. 3, pp. 1493–1503, 2014.
[21] W. He, Y. Dong, and C. Sun, “Adaptive neural impedance control ofa robotic manipulator with input saturation,” IEEE Transactions onSystems, Man, and Cybernetics: Systems, vol. 46, no. 3, pp. 334–344,2016.
[22] C. Sun, W. He, W. Ge, and C. Chang, “Adaptive neural network controlof biped robots,” IEEE Transactions on Systems, Man, and Cybernetics:Systems, vol. 47, no. 2, pp. 315–326, 2017.
[23] A. C. Huang, S. C. Wu, and W. F. Ting, “A FAT-based adaptivecontroller for robot manipulators without regressor matrix: theory andexperiments,” Robotica, vol. 24, no. 2, pp. 205–210, 2006.
[24] M. C. Chien and A. C. Huang, “Adaptive impedance control of robotmanipulators based on function approximation technique,” Robotica,vol. 22, no. 3, pp. 395–403, 2004.
[25] A.-C. Haung and K.-K. Liao, “FAT-based adaptive sliding control forflexible arms: Theory and experiments,” Journal of Sound and Vibration,vol. 298, no. 1, pp. 194–205, 2006.
[26] C. Kai and A. C. Huang, “A regressor-free adaptive controller for robotmanipulators without Slotine and Li’s modification,” Robotica, vol. 31,no. 7, pp. 1051–1058, October 2013.
[27] D. Ebeigbe, D. Simon, and H. Richter, “Hybrid function approximationbased control with application to prosthetic legs,” in IEEE SystemsConference, Orlando, Florida, April 2016.
[28] E. Kreyszig, Advanced engineering mathematics. Wiley, 2010.[29] J. J. E. Slotine and W. Li, “On the adaptive control of robot manipu-
lators,” International Journal of Robotics Research, vol. 6, no. 3, pp.49–59, 1987.
[30] M. M. Zirkohi, “Direct adaptive function approximation techniquesbased control of robot manipulators,” Journal of Dynamic Systems,Measurement, and Control, vol. 140, no. 1, p. 011006, 2018.
[31] A. Izadbakhsh and M. M. Fateh, “Real-time robust adaptive control ofrobots subjected to actuator voltage constraint,” Nonlinear Dynamics,vol. 78, no. 3, pp. 1999–2014, 2014.
[32] S. Khorashadizadeh and M. M. Fateh, “Uncertainty estimation in robusttracking control of robot manipulators using the fourier series expan-sion,” Robotica, vol. 35, no. 2, pp. 310–336, 2017.
[33] A. Izadbakhsh, “FAT-based robust adaptive control of electrically drivenrobots without velocity measurements,” Nonlinear Dynamics, vol. 89,no. 1, pp. 289–304, 2017.
[34] K. S. Narendra and J. Balakrishnan, “Improving transient response ofadaptive control systems using multiple models and switching,” IEEETransactions on Automatic Control, vol. 39, no. 9, pp. 1861–1866, 1994.
[35] R. R. Goldberg, Methods of Real Analysis. John Wiley and Sons, 1976.[36] W. Rudin et al., Principles of mathematical analysis. New York:
McGraw-Hill, 1976.[37] A.-C. Huang and Y.-S. Kuo, “Sliding control of non-linear systems con-
taining time-varying uncertainties with unknown bounds,” InternationalJournal of Control, vol. 74, no. 3, pp. 252–264, 2001.
[38] K. Kaneko and R. Horowitz, “Repetitive and adaptive control of robotmanipulators with velocity estimation,” IEEE Transactions on Roboticsand Automation, vol. 13, no. 2, pp. 204–217, 1997.
[39] A. C. Huang and M. C. Chien, Adaptive Control of Robot Manipulators:A Unified Regressor-Free Approach. World Scientific, 2010.
[40] H. K. Khalil, Noninear systems. Prentice-Hall, New Jersey, 2002.[41] C. Edwards and Y. B. Shtessel, “Adaptive continuous higher order sliding
mode control,” Automatica, vol. 65, pp. 183 – 190, 2016.[42] ——, “Adaptive dual-layer super-twisting control and observation,”
International Journal of Control, vol. 89, no. 9, pp. 1759–1766, 2016.[43] M. Sharifi and H. Moradi, “Nonlinear robust adaptive sliding mode
control of influenza epidemic in the presence of uncertainty,” Journalof Process Control, vol. 56, no. Supplement C, pp. 48 – 57, 2017.
[44] T. T. Nguyen, H. Warner, H. La, H. Mohammadi, D. Simon, andH. Richter, “State estimation for an agonistic-antagonistic musclesystem,” Asian Journal of Control, vol. 0, no. 0, 2018. [Online].Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/asjc.1916
[45] D. Ebeigbe and D. Simon, “A passivity-based regressor-free adaptivecontroller for robot manipulators with combined regressor/parameter es-timation,” in ASME Dynamic Systems and Control Conference, Atlanta,Georgia, September–October 2018.
[46] M. W. Spong and R. Ortega, “On adaptive inverse dynamics control ofrigid robots,” IEEE Transactions on Automatic Control, vol. 35, no. 1,pp. 92–95, 1990.
[47] D. Ebeigbe, RFAT Controller MATLAB R© Source Code, April 2019,http://embeddedlab.csuohio.edu/prosthetics/research/robustfat.html.
[48] C.-Y. Kai and A.-C. Huang, “A regressor-free adaptive impedancecontroller for robot manipulators without slotine and li’s modification:theory and experiments,” Robotica, vol. 33, no. 3, pp. 638–648, 2015.
Donald Ebeigbe received the B.Eng. degree inElectrical and Electronics Engineering from FederalUniversity of Technology Akure, Nigeria, in 2011.He is currently a PhD candidate in the Departmentof Electrical Engineering and Computer Science,Cleveland State University. His research interestsinclude control theory, robotics, and optimization.
Thang Nguyen received the B.Eng. and M.S. de-grees from Hanoi University of Science and Tech-nology, in 2002 and 2004 respectively, and the Ph.D.degree from Rutgers University in 2010, all in Elec-trical Engineering. He is a Postdoctoral Scholar inthe Department of Mechanical Engineering, North-ern Arizona University. He held teaching and re-search positions at various universities in the USA,Australia, the UK, and Vietnam. His research in-terests include robotics, optimization, cyberphysicalsystems, and control theory.
Hanz Richter Hanz Richter is a Professor of Me-chanical Engineering at Cleveland State University(CSU). He earned the Ph.D. and an M.Sc. degreesfrom Oklahoma State University, and a B.Sc. fromthe Pontificia Universidad Catolica del Peru, Lima,Peru, all in mechanical engineering. He conductsresearch in the broad areas of control, roboticsand mechatronics with applications to biomedicalrobotics, aerospace propulsion, high-precision mo-tion control and smart sensors. His research fundinghas been supported by the US National Science
Foundation, NASA, the State of Ohio, the Parker-Hannifin Corporation andthe Cleveland Clinic Foundation.
Dan Simon received his BS degree from ArizonaState University in 1983, his MS degree from theUniversity of Washington in 1987, and his Ph.D.degree from Syracuse University in 1991, all in elec-trical engineering. He has had 14 years of industrialexperience in several engineering fields, includingaerospace, automotive, biomedical, process control,and software development. He joined ClevelandState University in 1999, where he is currentlya professor and the Associate Vice President forResearch. His teaching and research interests include
evolutionary algorithms, computer intelligence, and control theory. He hasover 200 peer-reviewed publications and is the author of the books OptimalState Estimation (John Wiley & Sons, 2006), Evolutionary OptimizationAlgorithms (John Wiley & Sons, 2013), and Evolutionary Computation withBiogeography-based Optimization (John Wiley & Sons, 2017). His publica-tions, teaching materials, and research-related software can be download fromhis web site at http://academic.csuohio.edu/simond/.