Embed Size (px)
DESCRIPTION
A seminar report reviewing the measurement standards for Synchronous Phasor Measurement Units (PMU).
Citation preview

Overview of IEEE Standards forSynchronous Phasor Measurement Units
(Course Seminar Report)
Joel Jose14T070001
Abstract—The abstract goes here.
I. INTRODUCTION
Increasing power system sizes make real-time system mon-itoring a very important task. System monitoring is more criti-cal during disturbances and transients. To capture the dynamicsaccurately, synchronized measurements from various parts ofthe system which might be spread across large geographicalarea is required. Synchronized measurements can also aid inprotection, automation and state estimation.
Synchronous Phasor Measurement Unit (PMU) is a devicewhich can measure electrical phasors synchronized with acommon time reference.
Phasors were introduced in power system analysis bySteinmetz in 1893 itself [1]. The first PMU prototypes weredeveloped in 1988 at Virginia Tech by Dr. Arun G. Phadke andDr. James S. Thorp and commercialized by Macrodyne in 1992[2]. Synchronized measurements are made possible by usingCoordinated Universal Time (UTC) from Global PositioningSystem (GPS).
The adoption of PMU in commercial systems were delayedby the following factors:
• High capital investment
• High maintenance and calibration costs
• Lack of interoperability in various commercial prod-ucts
Utilities needed the guarantee of reliability and accuracy ofPMUs and interchangeability among the PMUs from differentvendors before they invested in them. The requirement ofinteroperability and the need for improved testing and cali-bration methods led to the development of set of standardsfor measurement and data transfer using synchronous phasormeasurement units.
Section II discusses the evolution of IEEE PMU standards.The IEEE Std C37.118.1-2011 and the revision IEEE StdC37.118.1a-2014 are described in detail in further sections.A brief summary of the communications standard IEEE StdC37.118.2-2011 is presented in Section V.
II. IEEE PMU STANDARDS
The original synchrophasor standard was IEEE Std 1344-1995 which was reaffirmed in 2001. It discussed synchroniza-tion of data, sampling, data-to-phasor conversions, and formats
for timing input and phasor data output from a PMU. It wasreplaced by IEEE Std C37.118-2005 which introduced theconcept of Total Vector Error (TVE) and described compliancetests. The IEEE Std C37.118-2005 also brought in improve-ments in data communication specifications to facilitate bettercoordination with a master station.
The 2005 version specified performance of phasor mea-surement units only under steady-state conditions. The 2011revision, IEEE Std C37.118.1-2011 includes definitions andmeasurement requirements for dynamic power system condi-tions. Since synchronized measurements can be very usefulin capturing dynamics during transients and disturbances, theinclusion of specifications for such practical conditions in thestandard is essential. This revision separated the communica-tion sub-clause of IEEE Std C37.118-2005 into a separate stan-dard IEEE C37.118.2-2011 claiming that it will aid widespreadadoption and deployment.
III. THE IEEE C37.118.1-2011 STANDARD
Definitions givenPhasor estimation and time synchronizationTVEFERFEReporting latencyFlagsPerformance ClassesSteady state and dynamic complianceTime taggingAnnex B waveforms from the PMU simulator.Draw diagram of single phase estimation reference model fromAnnex C.
IV. THE IEEE C37.118.1A STANDARD
Why this revision?Impractical standards
V. THE IEEE C37.118.2 STANDARD
Just a brief intro of what the data transfer standard isdealing with.
VI. CONCLUSION
ViabilityImprovement

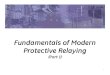
δ δ
δδ
V V
VV
t=0
Common Reference Signal
Bus 1 Bus 2
t=0
V, δ V, δ
Fig. 1. Phasor Representation
ACKNOWLEDGMENT
The authors would like to thank...
REFERENCES
[1] Steinmetz, C. P., Complex Quantities and Their Use in Electrical Engi-neering, Proceedings of the International Electrical Congress, Chicago,1893, pp 3374.
[2] Phadke, A. G., Synchronized phasor measurements-a historical overview,Transmission and Distribution Conference and Exhibition 2002: AsiaPacific.