Embed Size (px)
Citation preview

IEEE Catalog Number: CFP08INI
ISBN: 978-1-4244-2171-8
ISSN: 1935-4576
©2008 IEEE
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Table of Contents
SS-TCL : Tracking, communication and laser technology
Actuated Voltage Shift Mechanisms of MEMS Capacitive Switch Based on
Distributed Phase ShifterJia-hui Fu, Guo-hui Yang, Qun Wu 20
A Hierarchical and Partial-distributed Localization Scheme for Ad-hoc Wireless
Sensor NetworksLelin Zou, Zhiwen Zhao, Yuanqing Zheng 25
Study on photonic crystal filter for detecting the stimulated scattering signals in
atmosphereYuliang Zhang, Zhiwen Zhao, Fang Liu 30
Research on Channel Estimation for OFDM Receiver Based on IEEE 802.11aYuan Huimei, Ling Yingzhuan, Sun Hao 35
Optical Analysis for the Laser Scanning SystemTao Lv, Weihai Chen, Jianbin Zhang, Lihong Xu 40
Multi-Vision Information Fusion of a Laser Scanning SystemLihong Xu, Weihai Chen, Weiyang Song, Jianhua Wang 46
SS-IPSC : Image processing and system control
Color Map-Based Image FusionMohammed Hossny, Saeid Nahavandi, Doug Creighton 52
From Character Animation to Robot MotionShusong Xing, Huanyun Zhou 57
Biologically Inspired Robot Behavior Design Shusong Xing, Jiefeng Hua 63
Development and Application of Coastline Fractal Interpolation Computing
System Based on GIS and Fractal TheoryJiang Zhou, Pei-wu Li 68
Development of Urban Land Grading Information System Based on Component
GISJiang Zhou, Pei-wu Li 74
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Mathematical model of coordinate transformations for 3D Depth-of-field
information collection systemLixia Rong, Weihai Chen, Shouqian Yu, Yabin Liu 80
An Adaptive Speed-adjustable Scheme for 3D Laser Scanning Based on FPGA
and DSPWeiyang Song, Weihai Chen, Jingmeng Liu, Lihong Xu 86
Research on the Architecture of Automatic Meter Reading in Next Generation
NetworkLi Li, Xiaoguang Hu, Jian Huang, Ketai He 92
SS-EIS : Embedded and Intelligent Systems
A High-speed DAC module Designed for Imaging RadarLi Wei, Wang Jun, Lei Peng 99
SVM Multiple Non-linear Regression for Moisture Content DectectingGuo-hui Yang, Qun Wu, Yu Jiang 103
A Novel Fusion Method for DR /GPS Integrated Navigation SystemSantong Zhang, Shiwu Yang 108
Research on fast and accurate occlusion detection technology of augmented
reality systemZhang Jinling, Sun Hanxu, Jia Qingxuan, Yao Fusheng 111
Research of SoPC-Based Reconfigurable Machine Tools ControllerWei Hongxing, Wang Songbai, Sun Kai, Chen Youdong, Wang Tianmiao 117
Research on ReconfigurableRobot Controller Based on ARM and FPGAWei Hongxing, Li Chengcheng, Chen Diansheng, Wang Jun, Wang Tianmiao 123
Kinematics Control for a 6-DOF Space Manipulator Based on ARM Processor
and FPGA Co-processorZheng Yili, Sun Hanxu, Jia Qingxuan, Shi Guozhen 129
A New Lightweight Database Encryption Scheme Transparent to ApplicationsLianzhong Liu, Jingfen Gai 135
A Framework for Business-Oriented Security AuditLianzhong Liu, Wenli Jiang, Qiang Huang 141
Hardware Circuit Design of NC System Based on ARM and FPGAJingmeng Liu, Weihai Chen, Youzhu Ling, Tianmiao Wang 147
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Multi Sensor Data Fusion Method Based on Fuzzy Neural NetworkYouzhu Ling, Xiaoguang Xu, Lina Shen, Jingmeng Liu 153
SS-RF : RF Devices Design and Wireless Technology
Automated Robot Cell for EBiD-based Nano-AssemblyChristian Stolle, Sergej Fatikow 160
Design of RF MEMS Phase Shifter Based on Saw-shaped CPWKai Tang, Qun Wu, Guohui Yang, Xun-jun He, Jiahui Fu, Lewei Li 166
A Novel Design of RF-MEMS Phase Shifter Based on Bridge-like Coplanar
Waveguide 171
Lu-kui Jin, Qun Wu, Kai Tang, Xun-jun He, Jiahui Fu, Fang Zhang, Jongchul LeeModeling
Technique for Down-state of RF MEMS Phase Shifter Based on Artificial Neural
NetworkGuo-hui Yang, Qun Wu, Jia-hui Fu, Kai Tang, Xun-jun He 176
Fully-integrated CMOS Power Amplifier Design for WiMAX Application with
Semi-lumped TransformerBo-shi Jin, Qun Wu, Guohui Yang, Fanyi Meng, Jiahui Fu, Kai Tang 181
New Symbol Synchronization Algorithms for OFDM Systems Based on IEEE
802.11aYuan Huimei, Hu Xiaoguang, Ling Yingzhuan 186
Implementation of CCK Based on DSP for a WLAN TransceiverPeng Lei, Jun Wang, Wei Li 192
An Organization-OrientedModel for Federated Identity Management and Its
Application
Lianzhong Liu, Junxiu Gao 197
A Trusted Role-Based Access Control Model for Dynamic Collaboration in a
Federated EnvironmentLianzhong Liu, Peng Liu 203
SS-LIE : Logistics and Industry Engineering
Operation Analysis of Headend Process Facility Using Discrete Event Simulation
HyoJik Lee,Sung Hyun Kim,Hee Sung Park,Chang Hwan Choi,Ji Sup Yoon,Byung Suk Park 210
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Customer-Oriented Group Maintenance Model for Unreliable Service SystemGia-Shie Liu 215
Conceptual Design of Rail Transit Based Urban Logistics Delivery SystemKetai He, Juping Shao, Yubo Liu, Shaohua Dong 221
Process Abstraction and its Applications in Transportation SystemsKe Huang, Zhihong Li, Benjamin H.-Y. Koo 227
Improved Genetic Algorithm for Variable Fleet Vehicle Routing Problem with
Soft Time WindowQinghua Zhang, Yao Liu, Guoquan Cheng, Zhuan Wang, Haiqin Hu, Kui Liu 233
Code reuse based on information items pool and application in WMSQinghua Zhang, Haiqin Hu, Guoqian Cheng, Zhuan Wang, Yao Liu 239
Evaluation Model of Regional Logistics Competence Based on Hierarchy and
Fuzzy DecisionJuping Shao, Ketai He, Shaohua Dong, Lihua Wu, Tianyun Ma, Dong Wang 245
SS-DES : Dependable Embedded Systems
Safety Supervision LayerGeorg Hartner, Andreas Gerstinger 252
Modular Certification Support - the DECOS Concept of Generic Safety CasesEgbert Althammer,Erwin Schoitsch,Gerald Sonneck,Henrik Eriksson,Jonny Vinter 258
Outboard Flaps Control System based on the Avionics Deterministic
Fault-Tolerant Data Bus LTTPLeBel Kitoko, Lothar Klein, Georg Ried, Ulrich Zanker 264
IntegratingSafety and Multimedia Subsystems on a Time-Triggered
System-on-a-ChipRoman Obermaisser, Bernhard Frömel, Christian El-Salloum, Bernhard Huber 270
SS-IEC : Future Developments of IEC 61499 Standard
Considering IEC 61131-3 and IEC 61499 in the context of Component
FrameworksChristoph Sünder, Alois Zoitl, James H. Christensen, Heinrich Steininger, Josef Fritsche 277
Framework for Distributed Industrial Automation and Control (4DIAC)Thomas Strasser, Martijn Rooker, Gerhard Ebenhofer, Alois Zoitl, Christoph Sünder, Antonio
Valentini, Allan Martel 283
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

On Comparisons of the ISaGRAF implementation of IEC 61499 with FBDK and
other implementationsValeriy Vyatkin, Julien Chouinard 289
Implementation Model Alternatives for IEC 61499 Function Block NetworksKleanthis Thramboulidis, George Doukas 295
Defnition of the Execution Model Used in the Fuber IEC 61499 Runtime
EnvironmentGoran Cengic, Knut ÅKesson 301
Dynamic Reconfiguration of two Benchmarks Production SystemsMohamed Khalgui, Hans-Michael Hanisch 307
An Execution Semantic For Reconfigurable Manufacturing SystemsMohamed Khalgui, Hans-Michael Hanisch 315
SS-ITE : IT and Energy : Applications and Test Beds
KNIVES: A Distributed Demand Side Management System - Integration with
ZigBee Wireless Sensor Network and Application -Toshihiko Handa, Akihiro Oda, Tomokazu Tachikawa, Junichi Ichimura, Yuji Watanabe, Hiroaki
Nishi 324
Structural Health Monitoring System Considering Fault-toleranceYoshinao Matsushiba, Hiroaki Nishi 330
Cooperative Distributed Demand Control by Environment Sensor Network -
Estimating Number of People by CO2 Concentration -Tomokazu Tachikawa, Akihiro Oda, Toshihiko Handa, Junichi Ichimura, Yuji Watanabe, Hiroaki
Nishi 336
A simulation platform for distributed energy optimization algorithmsPeter Palensky, Friederich Kupzog, Adeel Abbas Zaidi, Kai Zhou 342
SS-ISS : Intelligent Sensing and Sensors
An Enhanced Parking Lot Service Model Using Wireless Sensor NetworkJung-Wook Lee, Sae-Sol Choi, Yoon-Bong Yoo, Jae-Jeung Rho 349
EEG Signal Classification Based on PCA and Fuzzy InferenceSo-Youn Park, Ju-Jang Lee 355
Bayesian Network-based Non-parametric Compact Genetic AlgorithmJoon-Yong Lee, Soung-Min Im, Ju-Jang Lee 359
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.
Comfortable Environments for Mental Work by Suitable Work-rest schedule:
Mental Fatigue and RelaxationLanlan Chen 365
SS-IR : Intelligent Robot
Hierarchical Path Planning Approach for Mobile Robot Navigation under the
Dynamic EnvironmentZeng Bi, Yang Yimin, Yuan Wei 372
Locomotion Pattern Generation of Semi-Looper Type Robots Using Central
Pattern Generators Based on Van der Pol OscillatorsKeigo Watanabe, Akihito Tajima, Kiyotaka Izumi 377
A Switching Control of Underactuated Manipulators by Introducing a Definition
of Monotonically Decreasing EnergyKiyotaka Izumi, Yuichi Kamada, Keisuke Ichida, Keigo Watanabe 383
Simulation of Mobile Robot Motion Considering Uncertainties in Robot ModelNak Yong Ko, Dong Jin Seo, Gwang Jin Kim, Yongseon Moon, Youngchul Bae 389
Damage Reduction of Robot at the Emergence Crash by modifying StiffnessTae-Yong Choi, Ju-Jang Lee 395
EvolvingArtificial Neural Network using Simple Augmenting Weight Matrix
MethodDong-Hyun Lee, Ju-Jang Lee 401
Intelligent Vision Sensor for the Robotic Laser Welding 406
Chang-Hyun Kim, Tae-Yong Choi, Ju-Jang Lee, Jeong Suh, Kyoung-Taik Park, Hee-Shin Kang
Localization and Map-building of Mobile Robot Based on RFID Sensor Fusion
SystemByoung-Suk Choi, Joon-Woo Lee, Ju-Jang Lee 412
Development of Robot and Navigation Techniques for Humanitarian DeminingMaki Habib 418
SS-IRA : Industrial Robot and Its Application
Performance Test of Industrial Dual Arm RobotKyoung Taik Park, Chan Hun Park, Young Jae Shin 425
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Design and Kinematics Analysis of Dual Arm Robot Manipulator for Precision
AssemblyChanhun Park, Kyoungtaik Park 430
Performance Test of Large Telescopic Robot for LCD Glass HandlingYoung-Jae Shin, Kyoung-Taik Park, Jung-Hoon Ha, Sang-Kyun Shim 436
Remote Control System of Industrial Field RobotsSoon-Young Yang, Soon-Kwang Kwon, Sung-Min Jin 442
A Low Cost Map Building Sensor System for Mobile RobotHyun-Seong Choi, Woong-Keun Hyun 448
SS-PCCT : Practice of Computational Intelligence Techniques in
Engineering
Robot Calibration Based On Multi-Thread Particle Swarm OptimizationLi Aiguo 454
Industry Robot and External Axle Calibration Using Particle Swarm Optimization
AlgorithmHuang Jin, Ma Zi, Hu Ying, Wang Yang, Yu Shuanghe 458
A Smart Supervisory Control System Framework for a Sugar Mill Crystallisation
StageRoland Dodd, Andrew Chiou, Xinghuo Yu, Ross Broadfoot 463
Hybrid Convolutional Neural NetworksIveta Mrazova, Marek Kukacka 469
Anfis controller for double inverted pendulumSheng Qiang 475
Adaptive Fuzzy Trajectory-Tracking Control of Uncertain Nonholonomic Mobile
RobotsShuanghe Yu, Shuang Liu, He Xu 481
Neural Network Modeling and Generalized Predictive Control for an Autonomous
Underwater VehicleJianan Xu, Mingjun Zhang 487
SS-PAC : Production Automation and Control, Innovative Future
Manufacturing
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Learning the Inverse Kinematics of Robot Manipulator using the Bees AlgorithmD.T. Pham, M. Castellani, A. A. Fahmy 493
Measuring the Effort of a Reconfiguration ProcessAmro Farid, Wuttiphat Covanich 499
An Attempt to Obtain Scheduling Rules of Network-based Support System for
Decentralized Scheduling of Distributed Production SystemsHisaaki Yamaba, Shinichi Matsumoto, Shigeyuki Tomita 506
Research Topics in Manufacturing - The I*PROMS PAC Delphi Study -Michael Hoepf, Harry Valsamos 512
AmI-based Production Systems: Configuration of Sequential Process Flow and
SoA-based DiagnosisMartin Feike, Nataliya Popova, Armando Walter Colombo 517
SS-ISST : Information Security, Safety and Trust
Application of Support Vector Machine for Equipment Reliability Forecasting
Feng Ding 526
Object-Oriented Analysis and Design of Elliptic Curve CryptosystemGuicheng Shen, Xuefeng Zheng 531
Dynamic Trust Model Applied In Mobile AgentZhen Ye, Weiwei Song, Dayong Ye, Lei Yue 536
Design and evaluation of a client-friendly cross-realm framework for Kerberos 5Ken'ichi Kamada, Shoichi Sakane, Kazunori Miyazawa, Nobuo Okabe 541
Multipath Key Management with Aggregation in Sensor NetworksSoonhwa Sung 547
Detecting Code Theft via a Static Instruction Trace Birthmark for Java MethodsHeewan Park, Seokwoo Choi, Hyun-il Lim, Taisook Han 551
An Integrated Framework of the Modeling of Failure-Detection and
Fault-Correction Processes in Software Reliability AnalysisJung-Hua Lo 557
A Dynamic-entropy Algorithm for Fault IsolationWang Dong 563
SCADA System Security: Complexity, History and New DevelopmentsNing Cai, Jidong Wang, Xinghuo Yu 569
Domain based Security for Mobile AgentsNajmus Saqib Malik, Michael Sonntag, Friedrich Kupzog 575
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Cryptanalysis on an Enhanced Identity-based Deniable Authentication ProtocolMeng Hui Lim, Sanggon Lee, Hoonjae Lee 581
Integrating Network Misuse and Anomaly PreventionYoseba Penya, Pablo García Bringas 586
A Proposal Framework for Adoption of Electronic Payment Services by Iranian
CustomersAbbas Keramati, Bahar Hadjiha, Mohamad Saremi 592
SS-SCT : Sensing and Communication Technologies
A Nonwhitening Post Filter to Improve the Performance of Sound Source
SeparationAugie Widyotriatmo, Harijono A. Tjokronegoro, Keum-Shik Hong 599
Redeployment Design Algorithm for Enhancing Channel Capacity in Multi-Agent
SystemsFeng-Li Lian, Jong-Hann Jean, Hou-Tsan Lee, Ko-Hsin Tsai 604
A High Dynamic Range SiGe HBT Variable Gain Amplifier for WCDMA
ApplicationsJunning Gan, Wanrong Zhang, Hongyun Xie, Dongyue Jin, Pei Shen, Jia Li, Lijian He, Wei
Zhang 610
Design a Wireless Sensor Network for Methane Monitoring System.Xuhui Zhang, Sunan Wang 614
Measurement and Analysis of Heart Signal Based on the Pressure SensorXu Wang, Jingjing Jin, Shilong Li 619
Application of Daubechies-Wavelet Based MRTD Schemes to Electromagnetic
ScatteringJiang Yu, Yu Shao-peng, Gao Hong-you, Xiao Hong, Teng Wei, Liu Xing-peng 623
Adaptive Optimization in A-D Converter SystemCe Fu 627
An Efficient Optimization for Passive Filter DesignCe Fu 631
A New Configuration of Differential CMOS LNAXuan Chen, Quanyuan Feng 635
An Automated Measurement System for Determining Magnetization
Characteristics of Switched Reluctance MotorsShun-Chung Wang, Yi-Hua Liu 639
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

A Wireless Escape System for Industrial Accidents Using Ad Hoc PositioningTengyue Zou, Huiyou Chang, Yang Yi 645
The Influence of Different Grid Length to the FDTD CalculationYu Jiang, Hong-you Gao, Shao-peng Yu, Hong Xiao, Xing-peng Liu, Wei Teng 651
A Real-time Finite Line Detection System Based on FPGA 655
Dongkyun Kim, Seung Hun Jin, Nguyen Tuong Thuy, Ki Hoon Kim, Jae Wook Jeon
ZigBee-based Wireless Extension of FOUNDATIO FieldbusTang Zhong, Zeng Peng, Yu Haibin, Wang Hong 661
Robust Filtering for Uncertain Discrete-Time Systems with Uncertain Noise
Covariance and Uncertain ObservationsShadyMohamed Korany Mohamed, Saeid Nahavandi 667
Real-time Sound Source Localization System based on an FPGASeunghun Jin, Dongkyun Kim, Hyung Soon Kim, Chang Hoon Lee, Jong Suk Choi, Jae Wook
Jeon 673
A Detailed Simulation Study for Troposcatter ChannelChen Shuxin, Gu Hailong 678
A Fast Encoding Algorithm for Vector Quantization Based on Haar Wavelet
TransformJiann-Der Lee, Yaw-Hwang Chiou 683
OCARI: Optimization of Communication for Ad hoc Reliable Industrial networksTuan Dang, Catherine Devic 688
A Study on the In-orbit Environment of a GPS Receiver for Low/Medium
Altitude SatellitesSung-in Chung, Hyo-sung Lee, Heung-ho Lee 694
Analysis of the Effects of High-energy electrons on a Low Earth Orbit Satellite
PartsSung-in Chung, Heung-ho Lee 700
Improved Method for Solving Permutation Problem of Frequency Domain Blind
Source SeparationWeihua Wang, Fenggang Huang 703
Packet Classification for Network Processors in WSN Traffic using ANNR. Rajkamal, P. Vanaja Ranjan 707
An Approach to Enhance Mobile Multicast Using Context TransferAisha Hassan,Wan Haslina Hassn 711
On Non-integer Order Rational Model IdentificationWu Defeng, Li Aiguo, Ma Zi, Zhu Quanmin 716
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Nano-Level 3-D Measurement System Using 3-Wavelength Laser Light
InterferenceSeiji Hata, Junichiro Hayashi, Ichirou Ishimaru, Sigeaki Morimoto 721
Theoretical and Experimental Study on Parameters Setting of Ant Colony
OptimizationYanPeng Liu, Yongsheng Yu, Wanjun Tian, Mingguang Wu, Jixin Qian 726
Multi-Agent System Coordination Architecture and Its Use in Electric Power
Decision Support SystemLianzhong Liu, Xiangrong Zu, Ruizhi Xu 731
Objective Function of Semi-Supervised Fuzzy C-Means Clustering AlgorithmChunfang Li, Lianzhong Liu, Wenli Jiang 737
SS-SOA Service-Oriented Architecture
Service-Oriented Control Architecture for Reconfigurable Production SystemsJ. Marco Mendes, Paulo Leitão, Armando W. Colombo, Francisco Restivo 744
Service-oriented Process Control using High-Level Petri NetsJ. Marco Mendes, Paulo Leitão, Armando W. Colombo, Francisco Restivo 750
Roadmap to adopting OPC UATom Hannelius, Mikko Salmenperä, Seppo Kuikka 756
A Generic Communication Interface for DPWS-based Web ServicesLuis Ribeiro, Jose Barata, Armando Colombo, Francois Jammes 762
Integration of Multi-Agent Systems and Service-Oriented Architecture for
Industrial AutomationVladimir Villaseñor Herrera, Axel Bepperling, Andrei Lobov, Harm Smit, Armando W. Colombo,
Jose L. Martinez Lastra 768
A Web Services-enabled B2B Integration Approach for SMEs Wen Jing Yan, Puay Siew Tan, Eng Wah Lee 774
Modelling interaction-aware services from an orchestration viewpoint
Corina Popescu, Jose L.Martinez Lastra 780
Web-based Vertical Information Services for Mining Right TradeHaizhong An, Na Cui 786
Service Oriented Architecture in Developing of Loosely-coupled Manufacturing
SystemsAndrei Lobov, Juha Puttonen, Vladimir Villaseñor Herrera, Rajasekaran Andiappan, Jose Luis
Martinez Lastra 791
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Device and Service Templates for the Devices Profile for Web ServicesAndreas Bobek, Elmar Zeeb, Hendrik Bohn, Frank Golatowski, Dirk Timmermann 797
SS-SCML : Supply Chain Management and Logistics
Strategic Supply Chain Positioning (SSCP) Methodology Development in SMEs
ContextRoland Lim, Laura Xu, Bin Ma 803
A Robust Pricing/Lot-sizing Model and A Solution Method Based on Geometric
ProgrammingSungmook Lim, Woo-Je Kim 808
An Implementation of Context-aware Partner Selection to Support Supply Chain
CollaborationsP.S. Tan, E.W. Lee, K. Mous, S.S.G. Lee, A.E.S. Goh 812
A Simulation System for Aerospace Spare Inventory Management and Decision
SupportKong-wei Lye, Lai-peng Chan, Xue-ming Yuan 819
Research on Dynamic Scheduling Operation Method in Supply Chain Based on
Ant Colony OptimizationWang Xu 825
Ontology-based Information Integration Framework for Mechatronics System
Multi-disciplinary DesignLuyan Bi, Zongxia Jiao, Shengtao Fan 831
A Mixed Integer Programming Model for Production Inventory Network DesignXue-Ming Yuan, Soumen Saha 837
Virtual Organization for Supply Chain IntegrationWilliam Y.C. Wang, Hing Kai Chan 843
To estimate the stage completion time for a two-stage flexible flow shop with
dynamic job arrivalMing-Hsien Yang, Shu-Hsing Chung, Ching-Kuei Kao 849
A Generic Model for Crossdock Truck Scheduling and Truck-to-Door Assignment
ProblemsMojtaba Shakeri, Malcolm Yoke Hean Low, Zhengping Li 857
Address Supply Chain Visibility from Knowledge Management Perspective
Allan N S Zhang 865
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Optimal Decision-making on Product Ranking For Crossdocking/Warehousing
OperationsZheng Ping Li 871
Supplier Performance Measurement in a Supply ChainLaura Xu, Bin Ma, Roland Lim 877
On Wheat Storage Period Estimation Using Markov_ chain AnalysisGe Wang, Qin Li, Jane You 882
SS-MR Mechatronics and Robotics
Study of sliding mode control for Stewart platform based on simplified dynamic
modelQiang Wu, Juan Chen, Zhiyong Tang 889
Accurate prediction of interception positions for catching thrown objects in
production systemsDennis Barteit, Heinz Frank, Friederich Kupzog 893
A Method to Find Local Planar Region from 3D Range DataSung-Jo Kim, Dong Joong Kang 899
Motion Control Design of the Lower-Limb Mobile Training RobotSyh-Shiuh Yeh, Hung-Hsiu Yu 904
Research on Computer Control System of Close Precision WindingWei Jian 910
Control of Commutation of SR Motor Using its Magnetic Characteristics and
Back-of-Core Saturation EffectsNerey Mvungi 915
Nonlinear Parameter Neuro-Estimation for Optimal Tuning of Power System
StabilizersSeung-Mook Baek, Jung-Wook Park 921
A Novel Adaptive Current Regulator for Permanent Magnet Synchronous Motor
Based on Modified Current DynamicsHongZhe Jin, JangMyung Lee 927
System Modeling and Stability Design for Peak Current-mode Buck Power
ConverterXiao-fei Chen, Xue-cheng Zou 933
Unfolding Enhancements Speed FSM Based SimulationP. J. Radcliffe 939
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

SS-BNA : Buildings, Networks and Automation
Port choice behavior in Asia - a network perspectiveJoyce M.W. Low, Loon Ching Tang, Xue Ming Yuan 946
Design of One-channel Embedded Network Video ServerShurong Chen, Kaiyu Xu, Haiyun Gu 952
A Performance Analysis ofthe Ethernet Nets for Applications in Real-Time: IEEE
802.3 and 802.3 1QRicardo Valentim, Gláucio Brandão, Ana Guerreiro 956
NCS Flexible Experimental System with Network Load ControlledZaiping Chen, Nan Yang, Enzeng Dong, Chunxue Liu 962
Gateway System for Automotives: LIN, CAN, and FlexRaySeung-Han Kim, Suk-Hyun Seo, Jin-Ho Kim, Tae-Youn Moon, Sung-Ho Hwang, Key-Ho Kwon,
Jae-Wook Jeon 967
Gateway-free Integration of BACnet and KNX using Multi-Protocol DevicesWolfgang Granzer, Wolfgang Kastner, Christian Reinisch 973
MP-HA: Multicycles Protocol for Hospital Automation over Multicast with IEEE
802.3Ricardo Valentim, Antônio Morais, Ana Guerreiro, Gláucio Brandão, Carlos Paz de Araújo 979
A hierarchical position based routing scheme for data centric wireless sensor
networksSajjad Madani, Daniel Weber, Stefan Mahlknecht 985
Research of Intelligent Building Control Using an Agent-based ApproachJianmin Duan, Fan Lin 991
A Tracking Mechanism Using Agents For Personal Mobility In Ip NetworksWan H. Hassan 995
Mathematical Analysis of Prioritized Data Transmission in the Foundation
FieldbusYong HeeLee, Seung Hwan Min, Seung Ho Hong 1000
SS-CCI : Cognitive and Computational Intelligence in Industrial
Informatics
A Simulation-based Approach to Job Shop Scheduling with BottlenecksRui Zhang, Cheng Wu 1007
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

The Self-Organization Genetic Algorithm Based on the Mutation with Cycle
ProbabilitiesBaojuan Huang, Jian Zhuang, Dehong Yu 1013
Bee Colony Optimization with Local Search for Traveling Salesman ProblemLi-Pei Wong, Malcolm Yoke Hean Low, Chin Soon Chong 1019
Study of a New Online Least Squares Support Vector Machine Algorithm in Gas
PredictionXiao-hu Zhao, Ke-ke Zhao 1026
Using Goal-oriented Paradigm for Community ComputingSehyeong Cho 1031
Forecasting Exchange Rate by Weighted Average Defuzzification Based on
NEWFMSang-Hong Lee, Joon S. Lim 1036
Neuro-Symbolic Networks: Introduction to a New Information Processing
PrincipleRosemarie Velik, Dietmar Bruckner 1042
Natural Histogram for Very Small Population StatisticsRadu D. Rugescu, Valentin Silivestru, Sorin Aldea 1048
Wavelet Neuron Selection Method for ECG Data CompressionXinping Yan, Yongming Yang 1054
Optimization of the Neural Structure based on Domain Expert Previous
Knowledge via GA and Sensitivity FactorsFabrício Bittencout, Luis Zárate 1058
A New Approach in Discrete Chaos System Control by Differential Evolution
AlgorithmFei Gao, JuJang Lee 1064
A New Approach in Synchronization of Uncertain Chaos Systems Through
Particle Swarm OptimizationFei Gao, JuJang Lee 1069
Knowledge-based Multi-Agent Architecture for Dynamic Scheduling in
Manufacturing SystemsMunir Merdan, Pavel Vrba, Gottfried Koppensteiner, Alois Zoitl 1075
A System Scheme of 3D Object Reconstruction From Single 2D Graphics Based
on Neural NetworksGuangmin Sun, Lei Xu, Deming Chen, Gang Li, Jing Wang 1081
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

A Simulation Platform for Cognitive AgentsTobias Deutsch, Tehseen Zia, Heimo Zeilinger, Roland Lang 1086
Network of Cooperating Smart Sensors for Global-View Generation in
Surveillance ApplicationsDietmar Bruckner, Rosemarie Velik, Gerhard Zucker 1092
A Novel Hybrid Wavelet Neural Network and Its Performance EvaluationY. Z. Zhao, N. K. Vuong, X. Li 1097
A hybrid Architecture for Function ApproximationHASSAB ELGAWI Osman 1103
SS-DENC : Distributed, Embedded and Networked Control
Evaluation of Embedded RBF Neural Chip with Back-propagation Algorithm for
Pattern Recognition TasksJeong S. Kim, Seul Jung 1110
An Improved Window Control Scheme Over FAST TCPFuzhe Zhao, Jianzhong Zhou, Zhimeng Luo, Yang Xiao 1116
Model-Driven Embedded Systems Design Environment for the Industrial
Automation SectorThomas Strasser, Christoph Sünder, Antonio Valentini 1120
Networked Control Systems by PID Controller Improvement of Performance
Degradation Caused by Packet LossRyotaro Okano, Tetsuya Ohtani, Akira Nagashima 1126
Automatic Model Generation of IEC 61499 Function Block Using Net
Condition/Event SystemsCheng Pang, Valeriy Vyatkin 1133
Development of an Embedded Controller for BioCD InspectionsFu-Shin Lee, Rou-Jiun Shiu, Ming-Da Chiang 1139
A Fault-tolerantGateway for In-vehicle Networks 1144
Suk-Hyun Seo, Tae-Youn Moon, Jin-Ho Kim, Key Ho Kwon, Seong-Ho Hwang, Jae Wook Jeo
A method of Task Synchronization in a distributed system using FlexRayJin Ho Kim, Suk Hyun Seo, Tae Yoon Moon, Chang Wan Son, Key Ho Kwon, Sung Ho
Hwang, Jae Wook Jeon 1149
System Structure for FPGA-Based SOPC Design Using Hard TasksJianzhaung Wang, Youping Chen, Jingming Xie, Bing Chen, Haiping Lin 1154
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Powering Flexible Manufacturing Systems with Intelligent Contact-less Power
TransferM. Budhia, V. Vyatkin, G. Covic 1160
Comprehensive Formal Description of IEC 61499 Control DevicesChristoph Sünder, Ivo Gosetti, Valeriy Vyatkin, Bernard Favre-Bulle 1166
Investigating Of Embedded Virtual Instruments MiddlewareNa Wang, Huasong Min 1173
Efficient Implementation of CNC Position Controller using FPGAYaodong Tao, Hu Lin, Yi Hu, Xiaohui Zhang, Zhicheng Wang 1177
An Efficient Calibration Method for RSSI-based Location AlgorithmsRafael Pereira Pires, Lucas Francisco Wanner, Antônio Augusto Fröhlich 1183
The reusable protocol-common block that can simulate the hardware
characteristicsTae-Yoon Moon, Suk-Hyun Seo, Seung-Han Kim, Jin-Ho Kim, Key Ho Kwon, Seong-Ho
Hwang, Jae Wook Jeon 1189
An Architecture for a Fault Tolerant Highly Reconfigurable Shop FloorLuis Ribeiro, Jose Barata, Bruno Ferreira, Jorge Pires 1194
A Proxy-based Approach for Mobility Support in the DDS SystemKi-Jeong Kwon, Chooog-Bum Park, Hoon Choi 1200
Extending timed net condition/event systems with hybrid petri netsJuha Puttonen, Andrei Lobov, Jose Luis Martinez Lastra 1206
Guidelines for Evaluating the Ease of Reconfiguration of Manufacturing SystemsWutthiphat Covanich, Duncan McFarlane, Amro Farid 1214
mplementation and Evalution of Decorators for Delayed Live Streaming Video on
Remote Control SystemShinichi Hamasaki 1220
SS-SME : e-Learning for Small and Medium Enterprises SME
The Universal Knowledge Moderator for Globally Distributed and Collaborative
e-ManufacturingH.K. Lin, J.A. Harding, A.K. Choudhary 1227
Market Orientation and Strategies in E-commerce CompaniesS. H. Chien, J. J. Wu, H. F. Lai 1232
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Design and Implementation of a Medical Knowledge Service System for
Cross-Organization Healthcare CollaborationYuh-Jen Chen 1238
An Evaluation Instrument for E-learning EcosystemVanessa Chang 1244
SS-EPT : Emerging Platform Technologies in Industrial Informatics
ICT and Business Alignment in Virtual OrganizationTaivo Kangilaski 1251
Image Acquisition and Processing for Falling Objects with Line CCD SensorLei Yan, Choon-Young Lee, Gang Zhao, Sang-Ryong Lee, Ki-Man Bae 1257
Event Cycle and Device Control in RFID Middleware O.P. Gan, C.C. Tan, S.C. Wang, G. C Tan, Y.Z. Zhao 1262
Towards a Unified Location Tracking System for Heterogeneous Industrial
EnvironmentsWerner Kurschl, Stefan Mitsch, Johannes Schönböck, Wolfgang Beer, Wolfgang Gottesheim, Rene
Prokop 1267
SolarEnergy: A Framework for Solar Energy ApplicationsGustavo Guidoni, Mark Song, Sergio Yoshioka, Reis Igor, Papatella Frederico, Zarate Luis,
Pereira Elizabeth 1273
The Role of Human, Organization and Technology in Building Competitive
Advantage with CRM: The Case of Iranian Internet Service IndustryAbbas Keramatia, Hamed Mehrabib and Mohammad Mousakhanic 1279
Database summarization approach based on description logic theoryAmel Triki, Yann Pollet, Mohamed Ben Ahmed 1285
Petroleum Ontology: an effective data integration and mining methodology aiding
exploration of commercial petroleum playsShastri L. Nimmagadda, Heinz Dreher 1289
Research on the SWF-net-based modeling technology of Virtual Enterprise
workflowDejun Chen, Heng Huang, C. Ji 1296
An Adaptive Model for Building Service-Partition SystemJian Wang, Jianling Sun, Xinyu Wang, Hang Chen, Juefeng Li, Kumar Sanjeev 1302
Personalized Domain-specific Search EngineLei Zhang, Yong Peng, Xiangwu Meng, and Jie Guo 1308
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

SS-ENIE : Engineering e-Networked Industrial Ecosystems
IT –Revolutions in the Industry: From the Command Economy to the
eNetworked Industrial EcosystemMihaela Ulieru, John Verdon 1315
Automation 2.0: Current Trends in Factory AutomationJose L. Martinez Lastra 1321
Highlighting the Issues in making an Informed Interaction-based Decision in
Industrial EcosystemsOmar Hussain 1324
Leveraging Paradox to Understand Technology Ecosystems: A Question of
BalanceLawrence John, John Boardman, Brian Sauser 1330
Auto ID-Enabled Framework for Manufacturing Information Sharing SystemsZude Zhou 1336
Creating Interoperability within Healthcare IndustryChen Wu, Maja Hadzic 1341
Short Term Forecasting For Lumpy and Non-lumpy Intermittent DemandsWei Khong Watson Chua, Xue-Ming Yuan, Wee Keong Ng, Tian Xiang Cai 1347
Developing a Semantic Service Transaction System in the DE EnvironmentHai Dong 1353
Distributed Teleoperation and Collaborative Environment for Robotics E-Learning
and CooperationMaki Habib 1358
Secure RFID-based Track and Trace Solution in Supply ChainsWei He, N. Zhang, P. S. Tan, E. W. Lee, T. Y. Li, T. L. Lim 1364
SS-FA : Factory Automation
A Feature Selection Method for Automated Visual Inspection SystemsHugo Garcia, Rene Villalobos 1371
MultiAgent Architecture for Function Blocks: Intelligent Configuration Strategies
AllocationVinicius Machado, Adriao Duarte, Jorge Dantas, Leonardo Ramalho, Juliana Medeiros 1377
Efficient Method for Correction and Interpolation Signal of Magnetic EncodersHieu Tue Le, Hung Van Hoang, Jae Wook Jeon 1383
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Effective Auto-tuning Proportional-Integral Controller based on a Heuristic
AlgorithmMai Thanh La, Quy Ngoc Le, Jae Wook Jeon 1389
Design and Validation of Distributed Control with Decentralized Intelligence in
Process Industries: A SurveyChia-han Yang, Valeriy Vyatkin 1395
3D graphic simulation of flexible manufacturing systems with Day Dream
Daemon and 3DCreateLuca Ferrarini, Carlo Veber 1401
Formal Model of Agent-based Supply Chain Framework in a Virtual Enterprise
for ReliabilityMukaila Rahman, Sarmad Sadik, Arshad Ali, Farooq Ahmad, Hiroki Suguri 1407
A Test Automation Solution on GUI Functional TestXiaochun Zhu, Bo Zhou, Juefeng Li, Qiu Gao 1413
SOA MIDDLEWARE AND AUTOMATION: Services, Applications and
ArchitecturesT Kirkham, D Savio, H Smit, R Harrison, RP Monfared P Phaithoonbuathong 1419
SS-HCM : Human Computer and Machine HCMI Interface
Automatic Segmentation of Scanned Human Bodies for Building LOD ModelsHui Yu, Shengfeng Qin, Guangmin Sun, David Wright 1426
Application of Optical Flow to Sonar Image for Mobile Robot NavigationGun-Young Park, Choon-Young Lee 1432
A Filter Approach for Myoelectric Channel SelectionGernot Kvas, Rosemarie Velik 1437
Remote Robot Control System based on DTMF of Mobile PhoneYun Chan Cho, Jae Wook Jeon 1441
Trends and proposals of user-designable mobile phone coverJae Hyung Park, Jae Wook Jeon 1447
Teleoperation of Multi-Robot and Multi-Property SystemsIldar Farkhatdinov, Jee-Hwan Ryu 1453
Request Classification of Web QoS Based On User Behavior AnalysisWang Cong, Guo Xiaolei, Shan Zhiguang 1459
Intelligent User Interface for Human-Robot InteractionTaehoun Song, Jihwan Park, Soonmook Jung, Keyho Kwon, Jaewook Jeon 1463
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Ontology-based Inference for Information-Seeking in Natural Language Dialog
SystemHyungjong Noh, Cheongjae Lee, Gary Geunbae Lee 1469
Observation System of Human-Object Relations in Intelligent SpaceKouhei Kawaji, Kazuki Yokoi, Mihoko Niitsuma, Hideki Hashimoto 1475
Low Delay Live Video Streaming System for Interactiv UseKenta Endoh, Kurima Yoshida, Takahiro Yakoh 1481
Usability Analysis of a PDA Based User Interface for Mobile Robot
TeleoperationJong Hyun Park, Tae Houn Song, Ji Hwan Park, Jae Wook Jeon 1487
Segmentation of Moving Objects using Multiple Background Model for Industrial
Mobile RobotsTaeho Kim, Kang-Hyun Jo 1492
The effect of neural network parameters on the performance of neural network
forecastingAli Azadeh 1498
SS-IIA : Industrial Informatics Applications
On Technology for Ontology-based Product Lifecycle Knowledge IntegrationYuh-Jen Chen 1507
One-way Ranging Technique for CSS-based Indoor LocalizationHyo-Sung Ahn, Hwan Hur, Wan-Sik Choi 1513
Analysis of Frame Delay Probability in the FlexRay Dynamic SegmentBongjun Kim, Kiejin Park 1519
Simulation of an Inductive Coupled High Frequency Resonant Gate Driver
CircuitNor Z. Yahaya 1523
A Test Framework for the Accuracy of Line Detection by Hough TransformsThuy Tuong Nguyen, Xuan Dai Pham, Dongkyun Kim, Jae Wook Jeon 1528
Hospital Automation RFID-BasedGustavo Florentino, Heitor Bezerra, Hélio Júnior, Marcelo Araújo, Ricardo Valentim, Antônio
Morais, Ana Maria, Glaúcio Brandão, Carlos Araújo 1534
A Code Generation Tool for Embedded Automotive Systems Based on Finite
State MachinesFelix Lindlar, Armin Zimmermann 1539
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Using virtualization to improve durability and portability of industrial applicationsAlain Ribiere 1545
A review and comparison of fuzzy regression models for energy consumption
estimationAli Azadeh, Oveis Seraj, Morteza Saberi 1551
Development of a Zigbee-based Electronics Ballast SystemYi-Hua Liu, Shun-Chung Wang, Po-Yen Chen 1556
A Total Fuzzy Regression Algorithm for Energy Consumption EstimationAli Azadeh, Oveis Seraj, Morteza Saberi 1562
Prototyping of an Optomechanical Apparatus for BioCD Specimen Image
InspectionsFu-Shin Lee, Rou-Jiun Shiu, Ming-Da Chiang 1569
On Characterizing the Interaction between Dynamical Behavior and Information
Flow in Networked Control SystemsFeng-Li Lian, Yi-Chun Lin 1574
Converting AVS coefficients to H.264/AVC transform coefficientsMinyue Wang, Guangmin Sun, Qiang Wu 1580
Embedded systems course for potential automotive engineersSeung-Han Kim, Suk-Hyun Seo, Jin-Ho Kim, Tae-Youn Moon, Seung-Ho Hwang, Key-Ho Kwon,
Jae-Wook Jeon 1584
A Panorama-Based Architecture for Multimedia from Hand-Held DevicesGuangqi Hou, Ping Wei 1590
In-Place Reconstructible Delta Compression using Alleviated Greedy Matching
AlgorithmYun Chan Cho, Jae Wook Jeon 1596
A UML Profile for HLA-Based Simulation System ModelingHengye Zhu, Guangyao Li, Liping Zheng 1602
Engineering Materials Test Process Monitor System Based on CSDA ArchitectureHongli Gao, Xu Lu, Ni Zhang 1608
Numerical Simulation and Visualization of Engineering Analysis of Thermal and
Flow Fields of Consecutive Diffusing FurnaceGuihua Hu, Wenhua Zhu, Tao Yu, Yupeng Su 1614
Design of Efficient Initialization for a Log-based File System over Flash
MemoryYoung Jun Cho 1620
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Optimal Tuning for Saturation Limiter of a Series FACTS deviceSeung-Mook Baek, Jung-Wook Park 1626
PowerGeneration Loading Optimization using a Multi-Objective
Constraint-Handling Method via PSO AlgorithmLily Li, Xiaodong Li, Xinghuo Yu 1632
KAD –an Integrated CAD and CSCW System for the Development of New
Product in Industry BusinessJoao Ferreira 1638
Artificial Neural Networks Applied for Representation of Curves Current-Voltage
of Photovoltaic ModulesLuis Zárate, Lauro V. B. M. Neto, Daniel Soares, Fabrício Bittencout 1644
Process Integration of Six Sigma and CMMIZhao Xiaosong, He Zhen, Zhang Min, Wang Jing, Yu Dainuan 1650
Emotion-Based Image Retrieval Using Multiple-Queries and Consistency FeedbackEun Jong Park, Joon Whoan Lee 1654
Evaluation of OPC UA Secure Communication in Web Browser ApplicationsAnnerose Braune, Stefan Hennig, Sebastian Hegler 1660
XT Algorithm for business data exchangeKelvin Leong, Joseph So, Vincent Ng, Mike Li, Tat Chee Tsui 1666
Advanced Fault Prediction in High-Precision Foundry ProductionYoseba Penya, Pablo García Bringas, Argoitz Zabala 1672
Impulsive Interference Detection Method Based on Morlet Wavelet and Maximum
Likelihood EstimationYuanYuan He, ChangJun Yu, TaiFan Quan, Xin Jin 1678
Control Software Design of Positron Emission Tomography Based on Real-Time
LinuxZhaohui Ren, Xiaopeng Li, Yongfu Wang, Bangchun Wen 1684
A Preprocessing Method for Tracking and Counting Pedestrians in Bus Video
MonitorYing Xin, Guangmin Sun, Qiang Wu 1689
Fault Mechanism Analysis and Accelerate Life Testing for Pneumatic CylindersJuan Chen 1694
Numerical Simulation and Experimental Study of Liquid-solid Two-phase Flow in
Nozzle of DIA JetGuihua Hu, Wenhua Zhu, Tao Yu, Jin Yuan 1700
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

Memorial Self Evolution Algorithm to Solve JIT Machine Scheduling ProblemWei Weng, Shigeru Fujimura 1706
Intelligent Track Guiding Controller—the Revolution of PIDWang Siyuan, Yang Yang, Yu Shuanghe, Chen Shao 1712
A Novel Robot System for Surface Inspection and Diameter Measurement of
Large Size PipesXu Zhang, Zi Ma, Ying Hu, Jin Huang 1717
Performances Linkages between an Airport and the Air Cargo Supply Chain -
Evidences from Hong Kong and Singapore
Joyce M.W. Low, Xue-Ming Yuan and Loon Ching Tang 1722
Authorized licensed use limited to: Universitatsbibliothek der TU Wien. Downloaded on February 2, 2009 at 04:49 from IEEE Xplore. Restrictions apply.

A Filter Approach for Myoelectric Channel
Selection
Gernot Kvas
Institute of Computer Technology
Vienna University of Technology
and
Otto Bock Healthcare Products GmbH
Email: [email protected]
Rosemarie Velik
Institute of Computer Technology
Vienna University of Technology
Email: [email protected]
Abstract—For the control of upper limb prostheses, machinelearning algorithms are increasingly common for disriminatingdifferent patterns of the surface myoelectric signal (MES).Sophisticated myoelectric controllers usually record data frommultiple bipolar channels, placed on muscle groups of interest.The appropriate number of channels is a delicate question. Oneusually tries to minimize the amount of channels required whilemaintaining reasonable classification performance. This paperpresents a filter approach to the channel selection problem byexploiting properties of the principal component analysis. Out ofa set of channels measured on the patient, a ”good” subset is se-lected for further processing by a pattern recognition algorithm.The method is applied to data recorded from an amputee whohas undergone targeted muscle reinnervation (TMR) surgery. Itis shown that the amount of channels can be reduced with onlyminor decrease of classification performance.
I. INTRODUCTION
The myoelectric signal (MES) recorded from the surface
of the skin is currently the most viable way for self-powered
upper limb prosthesis control. Such a prosthesis system would
typically consist of two bipolar electrodes, a controller, and
the mechanical arm itself. The electrical signal generated by
contracting muscles is picked up by the two bipolar electrodes
placed on the residual limb, amplified and finally processed by
the control algorithm. The controller translates the myoelectric
signal into joint movement of the artificial limb. Commercially
available systems predominatly use a rectified and filtered
MES as an input signal to the controller as an estimation
for the mean absolute value (MAV). This control strategy
can be easily applied in a clinical setting, is robust, and well
understood.
A. Pattern Recognition
The limited information of the MAV makes it difficult to
control complex artificial limbs with a high number of joints.
Research has therefore turned to more advanced features of
the myoeletric signal for better discrimination of the muscle
state. Features extracted from the MES range from simple
time domain charateristiscs like variance, zero crossings, and
length of the waveform to frequency and time-frequency
methods such as the short-time Fourier and wavelet transforms
[1]. The next processing step after feature extraction is a
classification algorithm, or in some cases a dimensionality
reduction algorithm [2] to improve the performance of the
subsequent classifier.
B. Targeted Muscle Reinnervation
Despite the advances due to the use of pattern recognition
algorithms and more informative features derived from remain-
ing muscles, there still exists what is known as the paradox in
myoelectric control [3]: The higher the level of amputation,
the more functionality the prosthesis has to provide. However,
with a high level of amputation the number of control sites,
remaining muscles from which the MES can be recorded,
decreases and control gets less intuitive for the patient.
Kuiken et al. [4] developed a new surgery method called
targeted muscle reinnveration (TMR) to overcome this prob-
lem. With TMR, otherwise unused nerves of the lost limb are
surgically connected to muscle groups in the chest and back
area that have lost their primary task due to the ampuation,
such as the m. pectoralis major and the m. pectoralis minor
in case of a shoulder disarticulation. Intended movements of
the lost limb now directly translate to muscle activity in the
respective area. This muscle activity can again be picked up by
electrodes and translated in prosthesis movements, resulting in
a very intuitive control.
C. Channel Selection
Initially, Zhou et al. [5] proposed high-density electromyo-
gram (EMG) recordings to capture all MES activity in the
area where reinnervation has been performed. A 127-channel
array of monopolar electrodes spaced 15 mm appart was used
to record different movements from TMR patients. As the
outcome of the surgery highly depends on how nerves grow
into their new target muscles, the global view given by such a
recording helps to assess surgery success. For a later fitting of
a prosthesis however, only a small subset of channels might
be used as data bandwidth and processing power are limited
on a battery-powered artificial limb. This paper proposes a
method to select a suitable subset of channels from a larger
number of bipolar electrodes attached to a patient using a
filter method based on principal component analysis (PCA).
Bipolar electrodes have been chosen such that both the initial

set of electrodes and the subset for classification use the same
electrode type.
II. ALGORITHM
Our method can be seen as a feature selection algorithm
with the notion that we don’t operate in the feature space
after feature extraction has taken place, but rather in the orig-
inal space, the physical channels. Two approaches to feature
selection algorithms are common for pattern recognition [6]:
filters and wrappers. Filters are independent of any subsequent
pattern recognition algorithm and work by filtering features
based on some performance measure. Wrappers, as the name
suggests, wrap around the classification algorithm used to
determine feature relevance. This work uses filters, with the
PCA as the performance measure.
A. Principal Component Analysis
Principal component analysis is a common method for
dimensionality reduction [7]. Given a n-dimensional original
space, PCA performs an orthogonal projection to a lower
dimensional space while maximizing the variance of the data.
Typically, PCA is applied as follows: Let X be a n×m matrix
with m n-dimensional feature vectors. Calculate X from X by
subtracting the mean from each of the n dimensions. With the
covariance matrix C calculated from X the following relation
holds:
CU = UL (1)
Columns of U are eigenvectors ui with the corresponding
eigenvalues in the diagonal matrix L with λ1 > λ2 > . . . >
λn.
L =
λ1 0 · · · 0
0 λ2 · · · 0
......
. . ....
0 0 · · · λn
(2)
Now the eigenvectors of the k largest eigenvalues (principal
components) are chosen to form a matrix U′
, where k has a
value between 1 and n. Let h be a vector from the original
n-dimensional space. Multiplication with matrix U′
will yield
a vector size k:
hn×1U′
k×n= h
′
k×1(3)
For k = n, no dimensionality reduction is achieved, but
rather a rotation of the original vector h coordinate axes along
the directions of largest variance. k, the number of principal
components kept, is typically chosen so that a certain threshold
(e.g., 0.9 or 0.95) of the variability of the original data is
retained:k∑
i=1
λi
n∑
i=1
λi
≥ threshold (4)
For each eigenvalue λi, the corresponding eigenvector ui
is a weight vector with the n-th coefficient indicating the
contribution of the n-th variable to this eigenvalue. As can
be seen in formula (3), all variables are used for a di-
mensionality reduction and the resulting vector as such has
no physical meaning. This is not desirable for reduction of
physical variables. The approach described in [8] can be used
to circumvent this problem, where the information from the
principal components is used to find important variables in the
original data. Let λn be the smallest eigenvalue. Now, find
the largest absolute value coefficent in the eigenvector un.
The variable corresponding to this coefficient is discarded, as
this variable contributes most to the smallest and thus least
important eigenvalue. In the next step, the variable with the
largest absolute value coefficient of eigenvector un−1 that has
not been already discarded is discarded. This is repeated for
each ui until the desired number of variables remain. The
number of variables can again be determined by formula (4).
B. Channel Selection
The abovementioned method is applied to the problem of
channel selection. Our algorithm is based on two underlying
assumptions: (a.) PCA projects data such that variance is
maximized. This favours channels with high inter-movement
variance. (b.) As input to the PCA, we propose the root mean
square value of each of the recorded signals. We assume that
regions of higher myoelectric activity carry more information.
Our algorithm therefore comprises the following steps:
1) Select a number of channels n
2) For each recorded movement in a set of m movements,
calculate the RMS value of each individual channel.
3) The result is a matrix Mof the size n × m.
4) Calculate and subtract the mean from each of the chan-
nels of M , yielding M′
.
5) Perform PCA given M′
.
6) Discard channels until the desired number of channels
remains using the method described.
The result is a subset of channels based on the variance
of the RMS values calculated from all channels over a set
of different movements. The channels are chosen by their
contribution to the most important principal components.
III. METHODS
To evaluate this method, EMG data from a patient who
has undergone targeted muscle reinnervation surgery has
been recorded. The patient is a double amputee with both
transhumeral and shoulder disarticulation amputations. TMR
surgery was performed on the shoulder disarticulation side at
the Vienna General Hospital in December 2006 [9].
Starting July 2007, multi-electrode measurements to facil-
itate prosthesis fitting have been made on a regular basis.
Custom active bipolar electrodes were fitted to the patient with
a gain of 40 dB at the electrode and further filtering and ampli-
fication was performed by a custom signal conditioning board.
The data were then digitized with a National Instruments USB-
6259 data acquisition unit. The sampling frequency was set
to 3 kHz. Digital filtering to eliminate 50 Hz interference and
harmonics was carried out in software. For feature calculation,
non-overlapping windows of 512 samples were used. At the

given sample frequency, this is well within the suggested 300
ms [10] that users would still perceive as real-time.
To assess the performance of the chosen channel subset,
feature extraction and classification was implemented. Both
autoregressive coefficients (AR) and time-domain (TD) fea-
ture sets were used in the feature extraction stage. 5th-order
autoregressive coefficients were computed using the Burg
method. For time domain features, zero-crossings, waveform
length and slope sign changes were calculated. Both feature
sets are known to shown good performance when classifying
MES [11] [10]. Classification was carried out with a linear
discriminant analysis (LDA) classifier and a support vector
machine implementation [12] with a radial basis function
(RBF) kernel. It is important to note that any features relying
on RMS values, such as the relative value between channels,
were omitted on purpose to avoid a possible interdependence
with the filter method. Feature vectors were normalized before
classification.
IV. EXPERIMENTAL RESULTS
To exercise the algorithm, four datasets have been recorded
over a period of seven months while working with the patient.
For each measurement session, the patient had to perform a
list of movements. Before each movement, the movement was
demonstrated by the physiotherapist. The patient is then asked
to hold each movement for approximatley 10 seconds. Table
I shows the number of movements and maximum number of
channels used for each session.
TABLE I
MOVEMENT CLASSES AND ELECTRODE CHANNELS
Movements Channels
Session 1 7 18
Session 2 12 24
Session 3 12 24
Session 4 12 24
Recordings of each session are split into training and testing
subsets. As a single ten-second movement at the given sample
rate of 3 kHz and window size of 512 samples would yield just
58 feature vectors, ten-fold cross validation is used to achieve
a better estimation of the classifier accuracy. A testing set
and a training set from the same session allows testing the
filter algorithm without the uncertainty of separate testing and
training sets, where the ability of the patient to reproduce the
exact movement greatly influences classification accuracy. For
each of the subsets of the cross validation step, a classifier is
trained and classification accuracy determined on the test set.
The error estimates are then averaged to yield an overall error
estimate. Figures 1 to 4 show the results for the AR and TD
feature sets and LDA and SVM classifiers.
Each plot shows the mean classification error over each
movement for one to the maximum number of channels
available for this measurement session. The solid line shows
the classification error of the subset chosen by the PCA
channel selection algorithm (”good” subset). For comparison
a subset selected from the first n channels discarded by the
algorithm (dotted line) is also shown.
Each of figures 1 to 4 is organised such that Session 1
results are in the top-left subfigure, with Session 2 results in
the top-right subfigure and Session 3 and 4 in the bottom left
and right, respectively.
1 4 7 10 13 160
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(a)
1 4 7 10 13 16 19 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(b)
1 4 7 10 13 16 19 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(c)
1 4 7 10 13 16 19 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(d)
Fig. 1. Results for a 5-th order AR model feature set and a LDA classifier.
1 4 7 10 13 160
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(a)
1 4 7 10 13 16 19 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(b)
1 4 7 10 13 16 19 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(c)
1 4 7 10 13 16 19 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Channels
Cla
ssific
ation E
rror
(d)
Fig. 2. Results for a TD feature set and a LDA classifier.
Figures 1 to 4 show similar results, independent of the
feature set and classifier. For a small number of channels
neither of the two subsets displayed can guarantee a reasonable
classification accuracy. For an increasing number of channels
however, the ”good” subset quickly shows reasonable accuracy
within 10% of the classification performance of the maximum
number of channels and not much performance improvement
1 4 7 10 13 160
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(a)
1 4 7 10 13 16 19 220
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(b)
1 4 7 10 13 16 19 220
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(c)
1 4 7 10 13 16 19 220
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(d)
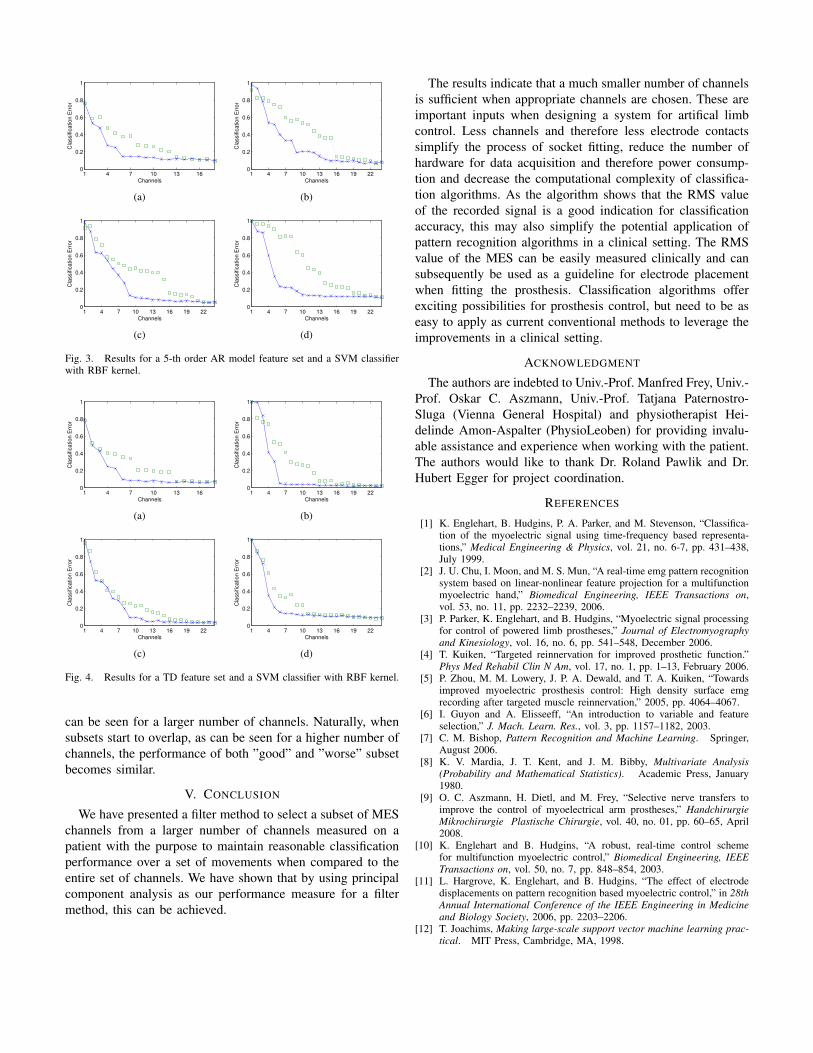
Fig. 3. Results for a 5-th order AR model feature set and a SVM classifierwith RBF kernel.
1 4 7 10 13 160
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(a)
1 4 7 10 13 16 19 220
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(b)
1 4 7 10 13 16 19 220
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(c)
1 4 7 10 13 16 19 220
0.2
0.4
0.6
0.8
1
Channels
Cla
ssific
ation E
rror
(d)
Fig. 4. Results for a TD feature set and a SVM classifier with RBF kernel.
can be seen for a larger number of channels. Naturally, when
subsets start to overlap, as can be seen for a higher number of
channels, the performance of both ”good” and ”worse” subset
becomes similar.
V. CONCLUSION
We have presented a filter method to select a subset of MES
channels from a larger number of channels measured on a
patient with the purpose to maintain reasonable classification
performance over a set of movements when compared to the
entire set of channels. We have shown that by using principal
component analysis as our performance measure for a filter
method, this can be achieved.
The results indicate that a much smaller number of channels
is sufficient when appropriate channels are chosen. These are
important inputs when designing a system for artifical limb
control. Less channels and therefore less electrode contacts
simplify the process of socket fitting, reduce the number of
hardware for data acquisition and therefore power consump-
tion and decrease the computational complexity of classifica-
tion algorithms. As the algorithm shows that the RMS value
of the recorded signal is a good indication for classification
accuracy, this may also simplify the potential application of
pattern recognition algorithms in a clinical setting. The RMS
value of the MES can be easily measured clinically and can
subsequently be used as a guideline for electrode placement
when fitting the prosthesis. Classification algorithms offer
exciting possibilities for prosthesis control, but need to be as
easy to apply as current conventional methods to leverage the
improvements in a clinical setting.
ACKNOWLEDGMENT
The authors are indebted to Univ.-Prof. Manfred Frey, Univ.-
Prof. Oskar C. Aszmann, Univ.-Prof. Tatjana Paternostro-
Sluga (Vienna General Hospital) and physiotherapist Hei-
delinde Amon-Aspalter (PhysioLeoben) for providing invalu-
able assistance and experience when working with the patient.
The authors would like to thank Dr. Roland Pawlik and Dr.
Hubert Egger for project coordination.
REFERENCES
[1] K. Englehart, B. Hudgins, P. A. Parker, and M. Stevenson, “Classifica-tion of the myoelectric signal using time-frequency based representa-tions,” Medical Engineering & Physics, vol. 21, no. 6-7, pp. 431–438,July 1999.
[2] J. U. Chu, I. Moon, and M. S. Mun, “A real-time emg pattern recognitionsystem based on linear-nonlinear feature projection for a multifunctionmyoelectric hand,” Biomedical Engineering, IEEE Transactions on,vol. 53, no. 11, pp. 2232–2239, 2006.
[3] P. Parker, K. Englehart, and B. Hudgins, “Myoelectric signal processingfor control of powered limb prostheses,” Journal of Electromyography
and Kinesiology, vol. 16, no. 6, pp. 541–548, December 2006.[4] T. Kuiken, “Targeted reinnervation for improved prosthetic function.”
Phys Med Rehabil Clin N Am, vol. 17, no. 1, pp. 1–13, February 2006.[5] P. Zhou, M. M. Lowery, J. P. A. Dewald, and T. A. Kuiken, “Towards
improved myoelectric prosthesis control: High density surface emgrecording after targeted muscle reinnervation,” 2005, pp. 4064–4067.
[6] I. Guyon and A. Elisseeff, “An introduction to variable and featureselection,” J. Mach. Learn. Res., vol. 3, pp. 1157–1182, 2003.
[7] C. M. Bishop, Pattern Recognition and Machine Learning. Springer,August 2006.
[8] K. V. Mardia, J. T. Kent, and J. M. Bibby, Multivariate Analysis
(Probability and Mathematical Statistics). Academic Press, January1980.
[9] O. C. Aszmann, H. Dietl, and M. Frey, “Selective nerve transfers toimprove the control of myoelectrical arm prostheses,” Handchirurgie
Mikrochirurgie Plastische Chirurgie, vol. 40, no. 01, pp. 60–65, April2008.
[10] K. Englehart and B. Hudgins, “A robust, real-time control schemefor multifunction myoelectric control,” Biomedical Engineering, IEEE
Transactions on, vol. 50, no. 7, pp. 848–854, 2003.[11] L. Hargrove, K. Englehart, and B. Hudgins, “The effect of electrode
displacements on pattern recognition based myoelectric control,” in 28th
Annual International Conference of the IEEE Engineering in Medicine
and Biology Society, 2006, pp. 2203–2206.[12] T. Joachims, Making large-scale support vector machine learning prac-
tical. MIT Press, Cambridge, MA, 1998.

















![©2014 IEEE. Personal use of this material is permitted ... · Siwei Zhang, Member, IEEE, Armin Dammann , Member, IEEE, and Uwe-Carsten Fiebig Member, IEEE ... • E[x] stands for](https://img.pdfslide.us/doc/110x75/5b6cd1b47f8b9aed178c6935/2014-ieee-personal-use-of-this-material-is-permitted-siwei-zhang-member.jpg)