Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader042.pdfslide.us/reader042/viewer/2022021919/5750a4ed1a28abcf0cae1765/html5/page/1.jpg)
Two-Step Hybrid Self-Localization UsingUnsynchronized Low-Complexity Anchors
Yue Wang†∗, Michael Wiemeler†, Feng Zheng†, Weiming Xiong∗, and Thomas Kaiser†† Institute of Digital Signal Processing, University of Duisburg-Essen, Duisburg 47057, Germany
∗ Center for Space Science and Applied Research, Chinese Academy of Sciences, Beijing 100190, China
Email: {yue.wang, michael.wiemeler, feng.zheng, thomas.kaiser}@uni-due.de, [email protected]
Abstract—Self-localization using unsynchronized low-complexity anchors has a number of attractive features.Traditional self-localization techniques are not suitable to thisscenario or have their applicability limitations. In this paper, atwo-step hybrid self-localization technique using unsynchronizedlow-complexity anchors is proposed, which can achieve two-dimensional (2-D) instantaneous localization for both mobileand fixed agents and eliminate the need for heading informationof the agents. In the first step, an initial location estimate isobtained utilizing range information based on received-signal-strength (RSS) measurements. In the second step, differentialangle-of-arrival (AOA) measurements are converted to rangemeasurements with the aid of the first step location estimate.Finally, a two-step hybrid localization algorithm is obtainedusing all the measurements in the first step and the second step.Simulation results show that the two-step hybrid self-localizationtechnique has relatively high accuracy even in the scenarioswith large RSS-based ranging variances and medium AOAmeasurement variances.
Keywords—angle-of-arrival (AOA), hybrid, received-signal-strength (RSS), self-localization, 60 GHz, ultra-wideband (UWB),unsynchronized low-complexity anchors.
I. INTRODUCTION
Real-time and high-accuracy self-localization is essentialto a variety of wireless applications, such as robotics, simul-taneous localization and mapping, internet of things (IoTs),as well as wireless sensor networks (WSNs) applications [1].Global navigation satellite systems (GNSSs) are the mostimportant technologies to provide global localization service.However, due to the inability of satellite signals to penetratemost obstacles, the accuracy of GNSSs is usually insufficientor invalid in harsh environments [2], such as in buildings, inurban canyons, under tree canopies, and in caves. Moreover,due to the severe constrains on power and cost of nodes inIoTs and WSNs applications, it is unlikely that each node isinstalled with one GNSSs receiver. Therefore, terrestrial self-localization techniques and facilities need to be developed.
Commonly, the location-related parameters, e.g., range orangle information, are firstly measured, then the location of theagent is estimated based on these location-related parametersusing geometric and statistical techniques [3]. Traditionalself-localization systems usually rely on time measurements,such as time-difference-of-arrival (TDOA) measurements andtime-of-arrival (TOA) measurements. In TDOA-based self-localization systems, all anchors need to be precisely synchro-nized and the synchronization is usually achieved by usingcalibrated cables connecting to a common timing-share device
[4]. TOA-based range measurements require either anchor-agent timing synchronization (one-way TOA ranging) or high-complexity anchors combined with multiple transmissions(two-way TOA ranging and its various) [4]. Angle-of-arrival(AOA) measurements can also be adopted to achieve self-localization, which usually require antenna arrays and headinginformation of the agents [3]. Ranging based on received-signal-strength (RSS) measurements is easily obtained but hasrelatively low accuracy in harsh environments [3].
Ultra wideband (UWB) signals can achieve high-accuracyTOA and AOA measurements even in harsh environments [2].Moreover, UWB-based localization devices have high powerefficiency. When the spectrum of UWB signals is modulatedinto higher frequency, such as 60 GHz band [5], the size ofeach antenna is very tiny and lots of antenna elements (tensto hundreds) can be utilized to construct a high-performanceantenna array with acceptable size.
For self-localization applications, it is attractive to useunsynchronized low-complexity anchors. These anchors areunsynchronized and have no power supply. They use energy s-cavenging from surrounding electronic-magnetic environmentsto provide their energy. Furthermore, these anchors are onlylow-complexity UWB transmitters with one omnidirectionalantenna on each, while the agents are equipped with antennaarrays to measure AOA information and perform beamformingto reduce multipath effect. Therefore, this system setting elim-inates the cables linking all the anchors to provide commontiming and power. Anchors are tiny and can be easily andquickly deployed, which is key for some emergency situationsand large indoor areas. In addition, anchors require no powersupply lines or battery changes, which is very important for thelong-time use without any human intervention. Furthermore,without high-complexity circuits, the cost as well as the powerconsumption of the localization system will be very low, whichis important for the IoTs and WSNs applications.
To achieve high-accuracy self-localization using unsyn-chronized low-complexity anchors, only AOA-based local-ization technique is suitable among traditional localizationtechniques. However, heading information of the agents, whichcan be internally measured via inertial measurements or ex-ternally obtained via a GNSSs receiver or a compass [6],is not available or has large accumulated errors in somecases. The self-localization techniques based solely on AOAmeasurements are discussed in [6]–[10], which either haveapplicability limitations as well as high-complexity or relyon the movements of the agent. AOA-based self-localizationtechniques for a cooperative formation are discussed in [11],
978-1-4799-0486-0/13/$31.00 ©2013 IEEE
![Page 2: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader042.pdfslide.us/reader042/viewer/2022021919/5750a4ed1a28abcf0cae1765/html5/page/2.jpg)
which commonly have multiple location solutions.
In this paper, we propose a two-step hybrid self-localization technique using unsynchronized low-complexityanchors, which can achieve two-dimensional (2-D) instan-taneous localization for both mobile and fixed agents andeliminate the need for heading information of the agents. Inthe first step, an initial location estimate is obtained utilizingrange information based on RSS measurements. In the secondstep, differential AOA measurements are converted to rangemeasurements with the aid of the first step location estimate.Finally, a two-step hybrid localization algorithm is obtainedusing all the measurements in the first step and the secondstep. Simulation results show that the two-step hybrid self-localization technique has relatively high accuracy even in thescenarios with large RSS-based ranging variances and mediumAOA measurement variances.
The rest of the paper is organized as follows. Section IIintroduces the system model. Section III proposes a two-stephybrid self-localization technique. Section IV gives simulationresults and the last section concludes the paper.
II. SYSTEM MODEL
We assume that the agent is connected to different anchors,and the agent can not only measure the range between it andeach anchor via RSS measurement, but also measure the AOAof signals transmitted from each anchor via its antenna array.Let N (N ≥ 3) be the total number of all anchors in thelocalization system.
The range measurement between the agent and the ith (i =1, 2, . . . , N ) anchor is denoted as di and the AOA measurementbetween them is denoted as θi. Let p = [x y]T be the unknown2-D position of the agent, which is to be estimated, and letpi = [xi yi]
T be the known 2-D coordinate of the ith anchor.
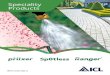
The error-free AOA between the agent and the ith anchoris given by (see Fig. 1)
θi = arctan
(y − yix− xi
)− α
where α is the heading angle of the agent relative to the xdirection of the whole Cartesian coordinates system, arctan(·)is the inverse trigonometric function of the tangent function.The AOA measurement is modeled as
θi = θi + ni
where ni is the AOA measurement error in θi, which resultsfrom the TDOA estimation disturbance between elements ofthe antenna array. It is assumed that {ni} are zero-meanindependent Gaussian processes with variances {σ2
i }.
If the heading information of the agent is not available orhas large accumulated error, the differential AOA informationcan be utilized to localize the agent. The differential AOA, i.e.,the subtended angle or bearing, from the ith anchor and thejth anchor (i, j = 1, 2, . . . , N, i > j) is given by
�θij =θi − θj = θi + ni − θj − nj = �θij + ni − nj
=arctan
(y − yix− xi
)− arctan
(y − yjx− xj
)+ ni − nj .
������
���
��
�
� �
�
�
��� �� ��
��� ��
Fig. 1. 2-D localization network with three unsynchronized low-complexityanchors, the measurements for anchor 1 and anchor 2 are drawn for illustration.
Therefore, the differential AOA measurements no longer de-pend on the heading of the agent, and we can write �θij ∼N (�θij , σ
2i + σ2
j ).
The error-free range between the agent and the ith anchoris given by (see Fig. 1)
di = ‖p− pi‖=
√(x− xi)2 + (y − yi)2.
The range measurement is modeled as
di = di + ni
where ni is the ranging error in di, which results from the RSSestimation disturbance. It is assumed that {ni} are zero-meanindependent Gaussian processes with variances {σ2
i }.
For the AOA measurement, it is the TDOA of an incomingsignal from the anchor at different antenna elements gives theAOA information for a known array geometry. The Cramer-Rao lower bound (CRLB) for the variance of an unbiasedAOA estimation θi for a uniform linear array (ULA) with Na
elements can be expressed as [3]
σ2i,CRLB,AOA =
3c2
2π2SNRiβ2Na(N2a − 1)l2 cos2 θi
where c is the propagation speed of localization signals, l isthe interelement spacing, SNRi = Ei/N0 is SNR from the ithanchor with Ei denoting the received signal energy and N0
denoting the one-side power spectral density of AWGN, andβ is the effective signal bandwidth defined by
β =
(∫ +∞−∞ f2|S(f)|2df∫ +∞−∞ |S(f)|2df
)1/2
with S(f) denoting the Fourier transform of the rangingsignal. When adopting ultra-wideband (UWB) signals for AOAestimation, high-accuracy AOA measurements can be achievedeven in harsh multipath environments [2].
![Page 3: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader042.pdfslide.us/reader042/viewer/2022021919/5750a4ed1a28abcf0cae1765/html5/page/3.jpg)
For RSS-based ranging, a common model used to calculaterange from path loss is given by
Pr(d) = P0 − 10γlog10(d/d0) + S
where Pr(d) is the average received power in decibels at adistance d, P0 is the received power in decibels at a shortreference distance d0, γ is the path-loss exponent that typicallyassumes values between 2 and 6, and S represents the large-scale fading variations (i.e., shadowing) in decibels, which iscommonly modeled as a Gaussian random variable with zeromean and standard deviation σsh. The CRLB of mean squareranging error from the ith anchor is [3]
σ2i,CRLB,RSS =
((ln10)σshdi
10γ
)2
.
Although the relation between average received power anddistance seems simple, it is quite challenging to obtain the ex-act relation between them in a practical wireless environmentdue to complicated propagation mechanisms such as reflection,scattering, and diffraction, which can cause significant fluc-tuations in RSS even over short distances and/or small timeintervals. Therefore, RSS-based ranging commonly has lowaccuracy, which is also true for UWB systems. For example,in a LOS residential environment, modeled according to theIEEE 802.15.4a UWB channel model [12], with γ = 1.79 andσsh = 2.22 dB, the lower bound σi,CRLB,RSS is about 2.86 m atdi = 10 m. Note that if the agent performs beamforming viaits antenna array to reduce the multipath effect, the RSS-basedranging can have better accuracy.
III. TWO-STEP HYBRID SELF-LOCALIZATION
A. First Step Localization from Range Measurements
In the first step, RSS-based range measurements are usedto obtain an initial location estimate of the agent. A linearleast squares (LLS) technique [13] is adopted to convert therange measurements into linear models in p and give a closeform location estimate p. We introduce a dummy variable R =x2 + y2 and define Θ � [x y R]T . Then, the estimate of Θ isgive by [13]
Θfirst =(AT
firstAfirst
)−1AT
firstbfirst.
where
Afirst =
⎡⎢⎢⎣−2x1 −2y1 1−2x2 −2y2 1
......
...−2xN −2yN 1
⎤⎥⎥⎦ , bfirst =
⎡⎢⎢⎢⎣
d21 − x21 − y21
d22 − x22 − y22...
d2N − x2N − y2N
⎤⎥⎥⎥⎦ .
The first step location estimate is simply extracted fromthe first and second entries of Θfirst, that is
pfirst =[[Θfirst]1 [Θfirst]2
]T.
B. Second Step Localization from Differential AOA Measure-ments With the Aid of the First Step Location Estimate
In the second step, we assume the heading informationof the agent is not available or has large accumulated error,
thus the location of the agent is determined only from differ-ential AOA measurements. According to the inscribed angletheorem1, each differential AOA measurement from a pair ofanchors determines a circle, where the agent as well as thesetwo anchors are located. For instance, the differential AOAmeasurements �θij determines a circle with center Cij andradius Rij , which passes through the agent as well as anchori and anchor j (see Fig. 1). The radius can be calculated as
Rij =dij
2| sin�θij |where dij is the length of the line lij connecting anchor i andanchor j, which is perfectly known.
The center Cij is located on the perpendicular bisector ofthe line lij . Commonly, there are two mirrored center solutions,where the line lij is the mirror axis (see Fig. 1). We denotethem as C1
ij and C2ij respectively, and let the coordinate of
the center Cmij be pm
ij = [xmij ymij ]
T (m = 1, 2). We define theangle of the line lij relative to the x direction of the wholeCartesian coordinates system as
βij � arctan
(yi − yjxi − xj
),
which is perfectly known. By using geometric knowledge, thecoordinate of C1
ij can be calculated as
⎧⎪⎪⎨⎪⎪⎩
x1ij =
xi + xj
2− dij sinβij
2| tan�θij |,
y1ij =yi + yj
2+
dij cosβij
2| tan�θij |.
Similarly, the coordinate of C2ij can be calculated as
⎧⎪⎪⎨⎪⎪⎩
x2ij =
xi + xj
2+
dij sinβij
2| tan�θij |,
y2ij =yi + yj
2− dij cosβij
2| tan�θij |.
A simple method to select the true center from twosolutions is using the first step location estimate pfirst. We cancalculate the distance between the first step location estimateand each center solution, then compare these two distanceswith the radius Rij . The center, whose calculated distancevalue is closer to the radius, is selected as the true center Cij ,which can be formulated as
Cij ={Cm
ij
∣∣∣minm
{∣∣‖pmij − pfirst‖ −Rij
∣∣}} , m = 1, 2.
We denote the coordinate of the selected center Cij as pij =[xij yij ]
T .
Since each differential AOA measurement from a pair ofanchors determines a circle, there are N × (N −1)/2 differentcircles after the center selection procedure. The center of each
1The inscribed angle theorem states that an angle θ inscribed in a circle ishalf of the central angle that subtends the same arc on the circle and the angleθ does not change as its apex moving to different positions on the circle.
![Page 4: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader042.pdfslide.us/reader042/viewer/2022021919/5750a4ed1a28abcf0cae1765/html5/page/4.jpg)
circle can be considered as a non-ideal anchor, and the rangebetween the agent and the center Cij can be formulated as
Rij = ‖p− pij‖+ nij
=√(x− xij)2 + (y − yij)2 + nij
with i, j = 1, 2, . . . , N, i > j, where nij is the range errorin Rij resulted from both the differential AOA measurementdisturbance, i.e., ni and nj , and the first step location estimatedisturbance, which is actually determined by the RSS-basedrange measurement disturbance, i.e., {ni} ∀i.
Since the differential AOA measurements are convertedinto range measurements, we can reuse the LLS algorithm inthe first step localization procedure to yield the second steplocation estimate of the agent, which is give by
psecond =[[Θsecond]1 [Θsecond]2
]Twhere
Θsecond =(AT
secondAsecond
)−1AT
secondbsecond,
Asecond =
⎡⎢⎢⎣
−2x21 −2y21 1−2x31 −2y31 1
......
...−2xN(N−1) −2yN(N−1) 1
⎤⎥⎥⎦ ,
and
bsecond =
⎡⎢⎢⎢⎣
R221 − x2
21 − y221R2
31 − x231 − y231...
R2N(N−1) − x2
N(N−1) − y2N(N−1)
⎤⎥⎥⎥⎦ .
C. Two-step hybrid Localization from All the Measurements
After obtaining all the range measurements of the firstand the second localization step, a two-step hybrid locationestimate utilized these measurements is expressed as
phybrid =[[Θhybrid]1 [Θhybrid]2
]Twhere
Θhybrid =(AT
hybridAhybrid
)−1AT
hybridbhybrid,
Ahybrid =
[Afirst
Asecond
], bhybrid =
[bfirst
bsecond
].
IV. NUMERICAL SIMULATION RESULTS
The simulation scenario is depicted in Fig. 2, where anetwork with N = 4 anchors is used to localize one agent.The area is a square of L × L m2 and L is fixed to 10m. Four anchors are located at p1 = (0, 0), p2 = (L, 0),p3 = (L,L), and p4 = (0, L) respectively. The agent locationp is changed with 2 meter intervals within [1, 9] m both inx and y directions, yielding a 5 × 5 grid of possible agentlocations. The mean square position error (MSPE) of differentlocalization phases are simulated at each location on the grid,and then average over all the agent locations on the grid.
For simplicity, we assume that all the AOA measurementshave the same variance, i.e., σ2
i = σ2 ∀i, and all the RSS-based
�����
����� �����
�����
���
Fig. 2. 2-D localization network with four unsynchronized low-complexityanchors.
� � � � � � � ���
���
�
���
�
���
σ ��������
������� ���� ��
� �
����� ��� !"#�!�$���"%��#"%� ��� !"#�!�$���"%&'"(��� )*+��� !"#�!�$���"%
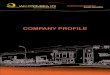
Fig. 3. Comparison of different localization phases (σ = 0.1 m).
range measurements have the same variance, i.e., σ2i = σ2 ∀i.
The standard deviation of the AOA measurements is set tobe σ ∈ [1◦, 10◦] with increasing step as 1◦. The standarddeviation of the RSS-based range measurements is set tobe σ ∈ {0.1, 0.5, 1} m. For each simulation setting, 103
simulations are run to get the average performance.
If the variances of RSS-based range measurements are verysmall, e.g., σ = 0.1 m, the simulation results are depicted inFig. 3. Since the first step localization is based solely on RSS-based range measurements, its performance is only affected bythe ranging variances and does not change as the variances ofAOA measurements change. The first step localization has bet-ter accuracy than both the second step localization and the two-step hybrid localization. Moreover, the second step localizationhas lower accuracy than the two-step hybrid localization. Thisis due to the fact that the RSS-based range measurementshave higher accuracy than AOA measurements, thus fusingboth types measurements leads to higher localization accuracythan the location estimate based solely on the inaccurateAOA measurements, but lower localization accuracy than thelocation estimate based solely on the accurate RSS-basedrange measurements. Additionally, as the variances of the AOAmeasurements increase, the average MSPE differences betweendifferent localization phases become larger.
![Page 5: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader042.pdfslide.us/reader042/viewer/2022021919/5750a4ed1a28abcf0cae1765/html5/page/5.jpg)
� � � � � � � ���
���
�
���
�
���
σ ��������
������� ���� ��
� �
����� ��� !"#�!�$���"%��#"%� ��� !"#�!�$���"%&'"(��� )*+��� !"#�!�$���"%
Fig. 4. Comparison of different localization phases (σ = 0.5 m).
If the RSS-based range measurements have medium accu-racy, e.g., σ = 0.5 m, the simulation results are depicted inFig. 4. All the localization phases degrade their performancecompared with Fig. 3, since all the localization phases directlyor indirectly use the RSS-based range measurements. Thesecond step localization outperforms the first step localizationif the AOA measurements have small standard deviations,i.e., σ ≤ 3, while this standard deviation range is extendedto σ ≤ 6 when adopting the two-step hybrid localizationtechnique. The reason is that the AOA measurements withsmall variances are more accurate than the RSS-based rangemeasurements, thus leading to better accuracy of both thesecond step localization and the two-step hybrid localization.Moveover, due to the involvement of the first step locationestimate in the procedure converting differential AOA mea-surements into range measurements, the larger variances ofRSS-based range measurements cause higher probability of thewrong circle center selections, thus the original accurate AOAmeasurements are converted into the range measurements withlower accuracy. Therefore, the two-step hybrid localization hasbetter accuracy than the second step localization even withsmall variances of the AOA measurements due to fusing morelocation-related measurements and these measurements haverelatively similar accuracy.
If the RSS-based range measurements have low accuracy,e.g., σ = 1 m, the simulation results are depicted in Fig. 5. Thetwo-step hybrid localization outperforms both the first step andthe second step localization even with large variances of theAOA measurements. Moreover, the average MSPE differencebetween the two-step hybrid localization and the second steplocalization becomes larger compared with Fig. 4. The reasonis that since the accuracy the RSS-based range measurementsdecreases, the AOA measurements with large variances can behelpful to the localization accuracy through fusing.
V. CONCLUSIONS
This paper proposes a two-step hybrid self-localizationtechnique using unsynchronized low-complexity anchors,which can achieve 2-D instantaneous localization for bothmobile and fixed agents and eliminate the need for headinginformation of the agents. The two-step hybrid self-localization
� � � � � � � ���
���
�
���
�
���
�
���
�
σ ��������
������� ���� ��
� �
����� ��� !"#�!�$���"%��#"%� ��� !"#�!�$���"%&'"(��� )*+��� !"#�!�$���"%
Fig. 5. Comparison of different localization phases (σ = 1 m).
technique has relatively high accuracy even in the scenarioswith large RSS-based ranging variances and medium AOAmeasurement variances.
ACKNOWLEDGMENT
Yue Wang was supported by the China Scholarship Councilfor one year research at the University of Duisburg-Essen.
REFERENCES
[1] D. Dardari, M. Luise, and E. Falletti, Satellite and Terrestrial RadioPositioning Techniques: A Signal Processing Perspective. Oxford:Elsevier, 2012.
[2] Y. Shen and M. Z. Win, “Fundamental limits of wideband localization-Part I: A general framework,” IEEE Trans. Info. Theory, vol. 56, no. 10,pp. 4956–4980, Oct. 2010.
[3] S. Gezici and H. V. Poor, “Position estimation via ultra-wide-bandsignals,” Proc. IEEE, vol. 97, no. 2, pp. 386–403, Feb. 2009.
[4] D. Dardari, A. Conti, U. Ferner, A. Giorgetti, and M. Z. Win, “Rangingwith ultrawide bandwidth signals in multipath environments,” Proc.IEEE, vol. 97, no. 2, pp. 404–426, Feb. 2009.
[5] D. Cabric, M. S. W. Chen, D. A. Sobel, J. Yang, and R. W. Brodersen,“Future wireless systems: UWB, 60 GHz, and cognitive radios,” inProc. IEEE Custom Integrated Circuits Conf. (CICC), CA, Sep. 2005,pp. 793–796.
[6] M. C. Deans, “Bearings-only localization and mapping,” Ph.D. disser-tation, Carnegie Mellon Uni., 2005.
[7] A. N. Biship, B. D. O. Anderson, B. Fidan, P. N. Pathirana, andG. Mao, “Bearing-only localization using geometrically constrainedoptimization,” IEEE Trans. Aerosp. Electron. Syst., vol. 45, no. 1, pp.308–320, Jan. 2009.
[8] H. Hman, “Mobile platform self-localisation,” in Proc. Inf. DecisionControl (IDC), Adelaide, Australia, Feb. 2007, pp. 242–247.
[9] I. Shimshoni, “On mobiel robot localization from landmark bearings,”IEEE Trans. Robot. Autom., vol. 18, no. 6, pp. 971–976, Dec. 2002.
[10] M. Betke and L. Gurvits, “Mobile robot localization using landmarks,”IEEE Trans. Robot. Autom., vol. 13, no. 2, pp. 251–263, Apr. 1997.
[11] I. Shames, B. Fidan, B. D. O. Anderson, and H. Hman, “Cooperativeself-localization of mobile agents,” IEEE Trans. Aero. Elec. Sys.,vol. 47, no. 3, pp. 1926–1947, Jul. 2011.
[12] A. F. Molisch et al., “A comprehensive standardized model for ultraw-ideband propagation channels,” IEEE Trans. Antennas Propag., vol. 54,no. 11, pp. 3151–3166, Nov. 2006.
[13] S. A. Zekavat and R. M. Buehrer, Handbook of Position Location:Theory, Practice, and Advances. NJ: John Wiley & Sons, 2011, pp.44–46.