Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader036.pdfslide.us/reader036/viewer/2022073112/5750a1db1a28abcf0c96baec/html5/thumbnails/1.jpg)
P2P Cooperative GPS Positioning with Fine/Coarse Time Assistance
Simone Morosi, Enrico Del Re, Alessio Martinelli University of Florence – CNIT
Florence, Italy
Abstract— In this paper, a peer-to-peer cooperative algorithm with fine/coarse time acquisition and positioning has been implemented on GPS software-defined receivers. The benefits of the aiding information are considered. Moreover, experimental results evaluate the computational and accuracy performance in the acquisition and positioning processes, respectively.
Keywords- GNSS receiver; Softare-defined; Peer to-peer; Cooperative; Coarse-time; Positioning;
I. INTRODUCTION
The growing importance of position-based applications, such as rescue [1,2] and commercial operations or maritime and aviation applications, pushes Global Navigation Satellite Systems (GNSS) such as the Global Positioning System (GPS) [3] to assume an important role nowadays. Therefore, these applications must face tighter and tighter requirements on position accuracy, integrity, and on position availability.
In hostile conditions, where the Line-of-sight (LOS) to the satellites is partially or totally obstructed, such as urban canyons, foliage environments and indoor locations, the received signal strength from satellites to GNSS receivers might be too weak for an appropriate processing, leading the GNSS-based localization to degrade or even fail. Possible alternative approaches in hostile conditions are the Assisted-GNSS (A-GNSS) [4] and the Peer-to-Peer Cooperative Positioning (P2P-CP) ([5] and the references therein).
RF-IFFront-end ADC
GNSSDigital
Receiver
PHYSICAL LAYER RANGE LAYER
Signal Processing
PVT computation
Acquisition
Carrier tracking
Code tracking
Navigation data
extraction
Pseudorange Computation
ρ1[k]ρ2[k]
ρN[k]
yRF(t) yIF(t) yIF[n] PVT
PVTyIF[n]
ρ1[k]
yIF[n]
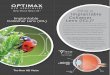
Figure 1. GNSS receiver representation.
The A-GNSS usually relies on cellular networks, where base stations are able to broadcast some aiding information to GNSS receivers such as visible satellites, ephemeris and ionospheric correction. Conversely, the P2P-CP exploits the direct communication between single nodes to exchange GNSS aiding information, leading to a flexible architecture and exploiting more effectively the local environment. Both the solutions aim at improving GNSS receiver performance such as availability, accuracy and Time-to-First-Fix (TTFF). In aided GNSS approach, the time synchronization between aided and aiding receivers is of capital importance for the exchanged information reliability: both the acquisition and the positioning procedures can be harmed by the lack of an accurate synchronization. As shown in Fig.1, the receiver digital processing can be split in physical and range layers. The physical layer, after signal acquisition, tracking and navigation data extraction, computes pseudorange measurements, while the range block determines the user position through a positioning algorithm. P2P-CP has some advantages with respect to A-GNSS: it doesn’t require any infrastructure and exploits more effectively the local environment; moreover, the aiding data could be exchanged as a subset of a larger set of information shared by two peers. Referring to the scheme shown in Fig.1, the aiding information can be divided in two classes: aiding quantities that can be used at physical layer (especially during signal acquisition) and aiding quantities used in range layer [6]. As for the implementation issues, the inherent limits of the traditional hardware-based GPS receiver can be overcome by Software-defined Radio (SDR) technology. SDR solutions aim at obtaining a flexible architecture receiver, and allow a dynamic selection of parameters for individual modules.
In this paper, a peer-to-peer cooperative algorithm with fine/coarse time acquisition and positioning is implemented and tested in GPS software-defined receivers. The aiding receiver is a stand-alone GPS software receiver implemented in MATLAB [7]: it performs acquisition (through a fast parallel acquisition technique, where the correlation function is evaluated by means of FFT operations as in Fig.2), code and carrier tracking, navigation bit extraction, navigation data decoding, pseudorange estimations, and position computation. The aided receiver is also a GPS software receiver defined in MATLAB, which implements assisted acquisition and positioning algorithm with fine/coarse time assistance.
In this work, two scenarios are considered: Outdoor-to-Indoor (O2I) and Outdoor-to-Outdoor (O2O) aiding scenarios
978-1-4799-0486-0/13/$31.00 ©2013 IEEE
![Page 2: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader036.pdfslide.us/reader036/viewer/2022073112/5750a1db1a28abcf0c96baec/html5/thumbnails/2.jpg)
(Fig.3): the former refers to an aided receiver which is located indoor (no LOS condition to the satellites) while the aiding receiver is outdoor (with LOS condition to the satellites); the latter refers to the case of two outdoor receivers (both with LOS condition to the satellites). For each scenario two tests will be considered: the former resorts to an off-line ideal synchronization between the aiding and aided receivers in the context of fine-time assistance; the latter refers to a context of coarse-time assistance where the receivers are synchronized by means of the Network Time Protocol (NTP).
II. SYSTEM MODEL
Focusing on cooperative positioning we have to consider the role of time synchronization between GNSS receivers [4]. In LOS condition, the GNSS receiver decodes time-of-week (TOW) information from the navigation data which is transmitted by the satellites. This information is required to form the complete pseudorange measurements. Under weak signal condition, the GNSS receiver cannot always reliably decode TOW due to high BER and has to rely on external assistance data to compute a reliable position fix. External information can include a combination of approximated user position, ephemerides, almanac, time and frequency.According to the 3rd Generation Partnership Project (3GPP), in A-GNSS the mobile network can provide time assistance on the order of microseconds or on the order of seconds. The former is often referred to fine-time assistance and the latter is referred to coarse-time assistance. Fine-time assistance not only relieves the receiver but also helps in accelerating signal acquisition through narrow search windows (leading to significantly improve the TTFF).
On the contrary, the coarse-time assistance cannot be used directly due to the possible large errors in satellite position which can be caused by the relative velocity: since the maximum pseudorange rate of a GPS satellites is about 800 m/s, a TOW estimate within ±2 seconds ends up causing a maximum geometric range error of ±1.7 km when used to compute satellite position. User position derived using such measurements can be mistaken by several kilometers [8]. On the other hand, estimating TOW from a coarse-time navigation algorithms could be advantageous in terms of :
• Faster TTFF;
• Obtaining a position fix under signal power conditions near or below the data decoding threshold;
• Energy savings obtained by avoiding the tracking ofSpace Vehicles (SVs) for six or more seconds to decode TOW.
Nonetheless, when only a coarse-time assistance is available, the receiver can either try to decode or estimate it as an additional unknown in the navigation solution (i.e. in addition to the usual four unknowns: user spatial coordinates and clock bias). Therefore, relative satellite velocity can also provide the means to eliminate the navigation error: particularly, it can be computed for each satellite through the ephemeris information provided as external aiding information. Thus, pseudorange rates for all satellites can be obtained from the
relative satellite velocities and included in the set of navigation equations together with unknown position, unknown receiver common bias, and unknown coarse-time error. In order to understand this approach, consider how the vector of a priori measurement residuals δz is formed [4]. When dealing with coarse-time assistance, the geometry matrix is derived as:
(1)
where • ѵ (k) = (e(k) * v(k) – δ’(k)) is the pseudorange rate
relative to the satellite k; • e(k) is the unit vector from the receiver to the satellite
k, and v(k) is the satellite velocity vector; • δ’(k) is the satellite-clock error rate.
If we assume at least five independent rows in H, we can achieve δx̂ (vector of updates for the a-priori state) by using, for example, the standard least-squares solution:
δx̂=(HT*H)-1*HT* δz = [δx, δy, δz, δb, δtc]T (2)
where
• (δx, δy, δz ) is the update to the a priori position state; • δb and δtc are the updates for the a-priori receiver
clock bias and coarse-time state.
Thus, we have derived a close-form five-state solution to the position problem with no precise time [4]. The following set of a priori information is typically required to get an estimate of the five states solution:
• A valid set of ephemeris (to obtain satellite positions and their relative velocities);
• Approximate user position within a few kilometers;
• Approximate TOW within a few seconds.
In the P2P-CP case, the a-priori information which is required for coarse-time positioning can be obtained by the aiding receiver. The sub-millisecond pseudorange can be computed by the aided receiver exploiting the aiding information provided at the physical layer. The integer-millisecond pseudorange has to be added to the sub-millisecond one in order to obtain an unambiguous pseudorange measurement. This operation has to be handled properly to avoid position error resulting from a combination of sub-ms clock bias, measurement noise, and sub-ms pseudoranges. This combined value could exceed the one millisecond boundary, thus leading to rollovers. In [4,9] an algorithm for solving millisecond ambiguity is described.
III. SYNCHRONIZATION
NTP is one of the most popular protocols for internet time synchronization: it is used to synchronize the network computer clocks to a common reference: therefore, it is used to achieve synchronization between a trusted time-server and its clients [10]. On a local area network, NTP can achieve a
![Page 3: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader036.pdfslide.us/reader036/viewer/2022073112/5750a1db1a28abcf0c96baec/html5/thumbnails/3.jpg)
precision of tens milliseconds. The synchronization architecture uses a stratum concept [10], where each server on one level (stratum) is a time reference to lower levels. Primary servers are set at the root of the tree as stratum 1 and are synchronized to external precise clock reference.
IV. EXPERIMENTAL SETUP
In this paper, a peer-to-peer cooperation algorithm with coarse/fine time acquisition and positioning has been implemented on GPS software-defined receivers. Cooperation is carried out between two GPS software receivers (not far from each other), namely the aiding and the aided receivers.
The aiding receiver is a stand-alone GPS software receiver implemented in MATLAB [7]. It is able to perform acquisition (through a fast parallel acquisition technique, where the correlation function is evaluated by means of FFT operations as shown in Fig.2), code and carrier tracking, navigation bit extraction, navigation data decoding, pseudorange estimations, and position computations.
The aided receiver is also a GPS software receiver defined in MATLAB, which implements assisted acquisition and positioning algorithm with fine/coarse time assistance.
In this experiment, both the software receivers run over a common laptops and process sampled data at 16.368 MHz. The sampled data comes from a front-end module (Sige GN3S v3 [11]), which is connected via USB to the laptops. The front-end processes the satellite signals (L1 GPS signal at 1575.42 MHz) received from a patch GPS antenna, and through a filter, amplifier, mixer, ADC, it outputs a sampled signal at 16.368 MHz.
The receivers are connected through an ad-hoc Wireless LAN because they have to exchange data for the assisting process and to synchronize each other. In both the receivers is running a background application implementing an NTP protocol which is used for synchronization. The aiding receiver serves as a time server and the aided receiver is the client.
The scenarios depicted in Fig.3a (Outdoor-to-Indoor aiding scenario) and Fig.3b (Outdoor-to-Outdoor aiding scenario) are considered in this paper. Fig.3a illustrates the O2I scenario where the aiding receiver is located outdoor (with LOS condition to the satellites) about 40 meters from the aided receiver, which is located indoor (in no LOS condition). Fig.3b shows that in the O2O case both the aiding and aided receiver are located outdoor (both with LOS w.r.t. to the satellites).
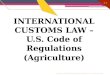
For each scenario two tests will be considered. The first test refers to an off-line ideal synchronization between the aiding and aided receivers in the context of fine-time assistance. The second test considers the coarse-time assistance where the receivers are synchronized by means of NTP protocol. The tests described in this paper were held at the Engineering Faculty of University of Florence and more. The indoor environment, where the aided receiver is located (Fig.4b) is inside the Faculty reception depicted in Fig.4a. The outdoor environment depicted in Fig.3b is the square in front of the Faculty building.
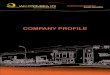
Figure 2. Scheme of the fast parallel acquisition technique. For the sake of simplicity, here is depicted only the processing about the in-phase branch.
Figure 3. a) Outdoor-to-Indoor scenario. The green circle represents the aiding GPS receiver located outdoor and the red circle represents the aided receiver located indoor. b) Outdoor-to-Outdoor scenario. The green and yellow circles represent the aiding and aided GPS receivers, both located outdoor.
V. EXPERIMENTAL RESULTS
A. Outdoor-to-Indoor (O2I) aiding scenario
1) Fine-Time assistance
In this test, an off-line technique has been emulated to ideally synchronize the aiding and aided receivers. Thus, we are in the presence of fine-time assistance.
a) Acquisition
The aiding receiver performs acquisition and tracking in stand-alone mode, and the acquisition result is depicted in Fig.5. The receiver acquires the satellites 2,4,7,10,13 and 23 using 1 ms of coherent integration and 1 non-coherent integration. The green bars in Fig.5 refer to the acquired satellites. A single peak represents the ratio between the highest and second highest peak in the “code delay-frequency” search space for each satellite. Fig.6a depicts the position of the acquired GPS satellites with respect to the GPS antenna connected to the aiding receiver. Assuming fine-time assistance condition, the aided receiver performs an assisted acquisition thanks to the following quantities which are broadcasted by the aiding receiver:
• Satellite IDs for the visible satellites.
•Doppler frequency relative to each satellite (to reduce the frequency search space in the acquisition process).
•Time stamp of the first sub-frame of the navigation message (to identify the bit transition time).
![Page 4: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader036.pdfslide.us/reader036/viewer/2022073112/5750a1db1a28abcf0c96baec/html5/thumbnails/4.jpg)
�Figure 4. a) The reception of the Engineering Faculty of the University of Florence. b) The indoor environment where the aided receiver is located.
The aided receiver will try to acquire only the satellites which are indicated by the aiding receiver. As shown in Fig.6b, it is not able to acquire satellites with a 1 ms coherent integration and one non coherent integration due to the weak received signal strength caused by the indoor location. Therefore, its sensitivity has to be improved. In this case (i.e. for fine-time acquisition), the aided receiver can precisely know where the bit transitions of the navigation message occur. Thus, it can wipe off the signal from the navigation message end extend the coherent integration period to increase the receiver sensitivity. Therefore, the coherent integration time has been set equal to 20 ms whereas 5 non-coherent integrations have been used. The acquisition results with the new integration parameters are shown in Fig.7a.
To compare the computational performance between the aided and aiding receiver acquisitions, we evaluate the number of bins in the frequency search space. In the acquisition performed by the aided receiver the overall frequency search space is defined by the uncertainty about the following parameters:
• reference-frequency assistance;
• time assistance;
• a priori position;
• aided receiver speed.
We can ignore the last three uncertainties by assuming that the receivers are not moving and their distance is less than 1 km with a fine-time assistance [4]. Therefore, the reliability of the Doppler frequencies which are provided by the aiding receiver just depends on the reference-frequency assistance. Considering the frequency assistance within ± 2ppm [12,13], the frequency error magnitude will be up to 1.575 kHz for L1 band. That is to say that the frequency search space is within -1.575 to +1.575 kHz, i.e., the overall space is 3.150*103 Hz. The frequency bin width in the acquisition frequency search space relative to the aided receiver can be determined as:
FW = (1/ (CIT / 1000) ) / 2 = (3)
= (1/ (20 / 1000) ) / 2 = 25 Hz,
where CIT is the coherent integration time and FW is the frequency width.
Acquired signalNot acquired signal
0
0.5
1
1.5
2
2.5
0
Acquisition Result
Acqu
isiti
on m
etri
c
3
3.5
4
4.5
5 15 2010 25 30
PRN number
Figure 5. Aiding receiver acquisition results in case of 1 ms of coherent integration and 1 non-coherent integration.
In conclusion, the number of frequency bins for the aided receiver acquisition is:
NBIN(Aided Receiver)Fine-Time = (4)
= FSS / FW = ( 3.150*103 ) / 25 = 126 bins,
where FSS is the frequency search space. On the other hand, the number frequency bins for the aiding receiver acquisition is:
NBIN(Aiding Receiver) = (5)
= FSS / FW = ( 8.4*103 + 3.150*103 ) / 500 = 24 bins,
where 8.4*103 Hz is the frequency range caused by the Doppler effect of satellite motion and 500 Hz is the frequency bin width resulting from the coherent integration of 1ms. For what concerns the computational load, taking into account the number of bins to be scanned during the acquisition process in O2I scenario with fine-time assistance, we can conclude that the TTFF related to the aided receiver increases by 5 times with respect to the aiding receiver TTFF.
b) Positioning
The aiding receiver performs the positioning procedure in a stand-alone mode, while the aided receiver resorts to an assisted positioning thanks to the following aiding information broadcasted by the aiding receiver:
• aiding user position;
• navigation message (Ephemeris and almanac to compute the satellite position at the transmission time, ionospheric model, satellite clock corrections).
Once the aided receiver has accomplished the acquisition, the sub-ms pseudoranges are available. Then, the integer millisecond ambiguity is eliminated. Once the complete pseudoranges relative to the aided receiver are available, the satellite position at the transmission time is determined thanks to the ephemeris information provided as aiding information. Since the time assistance is fine, the fine-time positioning can be realized. The position computation of the aided receiver
![Page 5: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader036.pdfslide.us/reader036/viewer/2022073112/5750a1db1a28abcf0c96baec/html5/thumbnails/5.jpg)
is performed using the least-square method (using the aiding position as a priori position [4]). The computed position is shown in Fig.8a, which illustrates a position error of about 7 meters with respect the true position. For what concerns the computational performance of the positioning procedure, is important to note that the navigation message provided as aiding information, leads the aided receiver to drastically reduce the TTFF with respect to the aiding receiver.
2) Coarse-Time assistance
a) Acquisition
During the acquisition procedure, the aiding receiver performs the same tasks of the fine-time assistance case; the main difference concerns the aiding values which are transmitted: in this case the time stamp of the first sub-frame of the navigation message is not broadcasted. The satellite positions are the same of Fig.6a. The coherent integration time of the aided receiver is extended on a shorter interval than in presence of fine-time assistance because of the bit transitions in the navigation message. In this test, the coherent integration time has been limited to 11 ms and 9 non-coherent integrations are considered with the aim to compensate the possible SNR reduction. Note that since the aided receiver is indoor, the SNR must be improved to correctly acquire the satellite signals. The acquisition results are shown in Fig7b. The number of frequency bins in the search space for the aiding receiver acquisition is equal to 24, as in the test with fine-time assistance. Conversely, the number of frequency bins for the aided receiver is:
NBIN(Aided Receiver)Coarse-Time = (6)
= FSS/ FW = ( 3.150*103 ) / 45 = 70 bins
where 45 Hz is the frequency bin width resulting from the coherent integration of 11 ms. For what concerns the computational burden in O2I scenario with coarse-time assistance, taking into account the number of bins to be scanned during the acquisition process, we can conclude that the TTFF related to the aided receiver is 2 times larger than the aiding receiver’s one.
b) Positioning
The aiding receiver performs the positioning procedure in a stand-alone mode and broadcasts the aiding quantities to the aided receiver. The latter computes the complete pseudoranges as usually, but, since the time assistance is coarse, the time error has now to be compensated, in order not to cause satellite position errors. The compensation is performed by computing the pseudorange rates (for each satellite-receiver link) and including them in the geometry matrix in (1); then, the five-state updates are computed as in (2) using the least-square method [4]. The resultant position is shown in Fig.8b and denotes a position error of about 12 m with respect to the true position. This error is larger
than the one in the fine-time case mostly because of two reasons:
• in the coarse-time test, one satellite is missed, leading to a satellite geometry degradation;
• in the coarse-time test, the pseudorange rates are included in the geometry matrix in (1), leading to an Horizontal Dilution of Precision degradation [4]).
For what concerns the computational performance of the positioning procedure, it is important to note that, as in presence of fine-time assistance, the navigation message provided as aiding information leads the aided receiver to drastically reduce the TTFF with respect to the aiding receiver.
B. Outdoor-to-Outdoor (O2O) aiding scenario
a) Acquisition
In the O2O scenario (Fig.3b), the aided receiver does not take advantage of fine-time assistance during the acquisition: this is not surprising since, thanks to the LOS condition of the satellites, the aided receiver does not need an extension of the coherent integration time to increase its sensitivity. In O2I scenario, the width of the frequency bins ends up being reduced by the extension of the coherent integration time. Hence, even if the frequency search space is not changed or decreased, the computational burden of the aided receiver acquisition is higher due to the increase of the number of the frequency bins. The growth of the number of bins from 24 to 126 can be deduced from (5) and (4), even if the frequency search space decreases from (8.4*103 + 3.150*103) to 3.150*103 Hz. Therefore, the acquisition performed by the aided receiver is 5 times longer than the one experienced by the aiding receiver. In the O2O scenario, the aided receiver can exploit the Doppler information directly to reduce the number of bins, thus relaxing the computational load of the receiver acquisition. If we consider a coherent-time integration of 1 ms and 1 non-coherent integration, the number of frequency bins for the aided receiver acquisition is computed as follows:
NBIN(Aided Receiver) = (7)
= FSS/ FW = ( 3.150*103 ) / 500 = 7 bins
where 500 Hz is the frequency bin width resulting from the coherent integration time of 1ms. The number of bins in the aiding receiver acquisition can be considered the same as in (5) (i.e. NBIN=24). In conclusion, in the O2O aiding scenario, the aided receiver acquisition time is less than 4 times the aiding receiver acquisition, leading to a reduction in the TTFF.
b) Positioning
In O2O scenario, the fine-time positioning is more accurate than the coarse-time one (as in O2I scenario)
![Page 6: [IEEE 2013 International Conference on Localization and GNSS (ICL-GNSS) - TURIN, Italy (2013.06.25-2013.06.27)] 2013 International Conference on Localization and GNSS (ICL-GNSS) -](https://reader036.pdfslide.us/reader036/viewer/2022073112/5750a1db1a28abcf0c96baec/html5/thumbnails/6.jpg)
Acq
uisi
tion
met
ric
Figure 6. a) Position of the acquired GPS satellites. b) Aided receiver acquisition results with 1ms of coherent integration and 1 non-coherent integration in O2I sceario.
Acq
uisi
tion
met
ric
Acq
uisi
tion
met
ric
Figure 7. a) Aided receiver acquisition with 20 ms of coherent integration and 5 non-coherent integrations (fine-time assistance) in O2I scenario. b) Aided receiver acquisition with 11 ms of coherent integration and 9 non-coherent integrations (coarse-time assistance) in O2I scenario.
and the computational loads of the positioning procedures are comparable with the O2I case.
VI. CONCLUSION
In this paper, a peer-to-peer cooperative algorithm with coarse/fine time acquisition and positioning has been implemented on GPS software-defined receivers. The benefits of the aiding information are considered. Moreover, the experiment results evaluate the computational and accuracy performance in the acquisition and positioning processes, respectively. In particular, acquisition and positioning results have been described in both the presence of fine and coarse time assistance between the receivers. In O2I aiding scenario, the aided receiver (located indoor) must increase its sensitivity, causing a computational performance degradation in the acquisition process, either in presence of fine or coarse time assistance. The positioning results show that the aided receiver position with fine-time is more accurate than the coarse-time: this can be explained by two reasons:
• In the coarse-time test, one satellite is missed, leading to a satellite geometry degradation.
• In the coarse-time test, the pseudorange rates are included in the geometry matrix in (1), leading to an Horizontal Dilution of Precision degradation [4]).
Figure 8. a) Aided receiver position with fine-time assistance in O2I scenario. b) Aided receiver position with coarse-time assistance in O2I scenario.
In O2O aiding scenario, the aided receiver (located outdoor) does not need to increase its sensitivity. Therefore, it can directly exploit the aiding information to reduce the TTFF, even in the acquisition process, either in presence of fine or coarse time assistance. The fine-time positioning is more accurate than coarse-time positioning (as in O2I scenario) and the computational loads of the positioning procedures are comparable to the O2I scenario ones.
ACKNOWLEDGMENT
This work has been supported by the Italian Research Programs (PON): “TETRis: innovative Open Source Services over TETRA” and “MC3-CARE: Mobile Continuous Connected Comprehensive - Care”.
REFERENCES
[1] M. Panizza, C. Sacchi, J. Varela-Miguez, S. Morosi, L. Vettori, S. Digenti, E. Falletti, “Feasibility study of a SDR-based reconfigurable terminal for emergency applications”, Proc. of the 20011 IEEE Aerospace Conference, 2011, Big Sky, Montana, USA.
[2] S. Morosi, S. Jayousi, E. Falletti, G. Araniti: “ Cooperative Strategies in satellite assisted emergency services”, International Journal of Satellite Communications and Networking, Vol. 31, n. 3, May 2013, pp. 141-156.
[3] E.D. Kaplan, C.J. Hegarty, Understanding GPS Principles and Applications, 2st ed., Artech House, 2006
[4] F. V. Diggelen, A-GPS: Assisted GPS, GNSS, and SBAS, 1st ed., Artech House, 2009.
[5] R. Garello, L.L. Presti, G.E. Corazza, J. Samson, “Peer-to-Peer Cooperative Positioning – Part I: GNSS Aided Acquisition”, Inside GNSS, 2012.
[6] L. Deambrogio, C. Palestini, F. Bastia, G. Gabelli, G.E. Corazza, J. Samson, “Impact of High-End Receivers in a Peer-To-Peer Cooperative Localization System”, UPINLBS 2010, Helsinki, Finland, October 2010.
[7] K. Borre, D. M. Akos, N. Bertelsen, P. Rinder, S. H. Jensen, A software-Defined GPS and Galileo Receiver: A single-Frequency Aprroach, New York: Birkhäuser, 2007.
[8] M. Petovello, K. Muthuraman,”GNSS Solutions: Coarse Time Positioning”, Inside GNSS, 2012.
[9] F.V. Diggelen, “Method and Apparatus for Time Free Processing of GPS Signals”, United States Patent, Patent No: US 6,417,801, July 9, 2002.
[10] T. Neaogoe, V. Cristea, L. Banica, “NTP versus PTP in Compter Network Clock Synchronization”, IEEE ISIE 2006.
[11] http://www.spurkfun.com/products/10981, web page.
[12] Rakon “IT3205BE Product Data Sheet”, 2008.
[13] R.M. Cerda, “Understanding TCXOs”, Microwave Product Digest, April 2005.