Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 IEEE 3rd Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) - China (2013.05.26-2013.05.29)] 2013 IEEE International](https://reader042.pdfslide.us/reader042/viewer/2022030219/5750a49d1a28abcf0cabb819/html5/page/1.jpg)
Global Adaptive Disturbance Rejection for NonlinearMulti-Stationed Control Systems
Dabo XuSchool of Automation
Nanjing University of Science and Technology
Nanjing 210094, China
Email: [email protected]
Abstract—This paper studies a global distributed disturbancerejection problem for a class of multi-stationed and interconnect-ed systems by a networked feedback controller. By incorporatingan adaptive control technique, we present a networked internalmodel approach to solving a global output regulation problem.The study is motivated by and in turn applies to a control problemof accommodating external disturbance torques in a large spacetelescope (LST) system. Regarding this LST system, it is shownthat a global distributed regulator can be constructed leadingto the asymptotic stabilization while completely accommodate itsdisturbance torques.
I. INTRODUCTION
Consider a class of nonlinear multi-input multi-outputcontrol systems being transformable into the following form
i ∈ O : xi = Aixi +Bigi(x, v, w) +Bibi(w)ui (1)
which consists of N strongly coupled subsystems and whereO = {i}Ni=1, x = col(x1, · · · , xN ), each xi ∈ R
ri is theindividual motion state, ui ∈ R is the control input, and thematrix pair (Ai, Bi) takes the Brunovsky controllable normalform
Ai =
[0 Iri−1
0 0
]ri×ri
, B�i = [0 · · · 0 1]1×ri
.
In the plant dynamics (1), it is assumed that bi(w) ∈ R,simply denoted by bi, is an unknown constant gain with knownboundaries
0 < bmi ≤ bi(w) ≤ bMi, ∀w ∈ W
for some real numbers bmi, bMi. The variable v representssome disturbances, generated by a linear time-invariant ex-osystem described by
v = S(σ)v, v(0) ∈ V (2)
for a known compact set V ⊂ Rnv . (w, σ) ∈ W × S is some
parameter uncertainties in some compact sets W and S ofappropriate dimensions. Each function gi : R
r×V×W �→ R isassumed to be smooth in (x, v) and polynomial in v, vanishingat (x, v) = 0 for all w ∈ W.
Regarding the exosystem (2), we further assume that foreach σ ∈ S, all the eigenvalues of the matrix S(σ) are distinctwith zero real parts. Clearly this exosystem can generate thestep or sinusoidal signals or their mixtures. The transformed ordecomposed system (1) consists of multi individual motions,determined by its subsystems, that are strongly coupled viatheir respective state variables. Each isolated subsystem takes
a special strict feedback form [6], has well defined relativedegree ri, and is disturbed by some external disturbancesvisualized in (2).
The nonlinear systems in the form (1) are multi-stationedand interconnected, belonging to the category of multi-inputmulti-output nonlinear systems. This plant dynamics can al-so be treated as the conventional large-scale systems whenthey have a number of well defined controlled subsystems.However, instead of within the usual decentralized feedbackcontrol mode [13], we shall investigate the related disturbancerejection problem with a distributed control strategy. Our mainobjective is to address a constructive design of networkedregulators to achieve the asymptotic disturbance rejectionwhile maintain the stability of the closed-loop system.
Precisely, the concerned feedback control problem for theset of systems (1) and (2) is defined as follows.
Problem 1.1: (Global disturbance rejection) For systems(1) and (2), find a smooth regulator in the form
i ∈ O :
{zi = γi(z, xi)
ui = �i(z, xi)(3)
where zi ∈ Rnzi (for some positive integer nzi , possibly
vanishing) and z = col(z1, · · · , zN ) ∈ Rnz such that, for each
initial condition (x(0), z(0)) ∈ Rn×R
nz , each (v(0), w, σ) ∈V×W× S, both the following conditions are satisfied: (i) thetrajectory of the closed-loop system composed of (1) to (3)exists and is bounded over the time interval [0,+∞); (ii) thestate response satisfies limt→+∞ x(t) = 0.
The output regulation problem is a general feedback controlproblem which covers the tracking control and disturbancerejection as rather special problems, see [1, 6, 7] for a briefoverview. The above defined distributed disturbance rejectionproblem can be referred to distributed output regulation, see[16] for instance on distributed output regulation of multi-agent systems. The distribution happens in the multi-stationedcontroller (3) which makes use of potential interactions amongcontroller stations, in particular among the multi-stationed in-ternal models. The study of disturbance rejection is importantin controlling externally disturbed physical systems, especiallywhen the high accuracy is required, see [2, 3] and referencestheirin for some recent studies on spacecraft control systems.In [2, 3], the internal model approach has been applied andsuccessfully solved the complete disturbance accommodation.
In this paper, focusing on a class of nonlinear multi-stationed and interconnected systems, we present a networked
12
Proceedings of the 2013 IEEE International Conference onCyber Technology in Automation, Control and Intelligent Systems
May 26-29, 2013, Nanjing, China
![Page 2: [IEEE 2013 IEEE 3rd Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) - China (2013.05.26-2013.05.29)] 2013 IEEE International](https://reader042.pdfslide.us/reader042/viewer/2022030219/5750a49d1a28abcf0cabb819/html5/page/2.jpg)
internal model approach to solving an output regulation prob-lem. The resulting regulator is constructed in a distributedmode with respect to the internal model states and in adecentralized mode with respect to the system states. The studycan also be viewed as an extension of the decentralized controlproblem for large-scale systems that are more general than thesingle-input-single-output one [11].
The organization of this paper is as follows. In SectionII, the motivating example of LST control systems is shownand a disturbance rejection problem is also posed. In SectionIII, the main result is given based on a sufficient conditionwhich ensures existence of a star-type networked regulator.Continuing Section II, the verification and regulator designare shown in Section IV for LST system control. The paper isclosed with some concluding remarks in Section V.
II. MOTIVATING EXAMPLE
In this section, we revisit a spacecraft control system andits disturbance rejection problem. The LST system is nonlinearand admits a three-subsystem decomposition. The subsystemsare strongly coupled via the individual motion states: roll,pitch, and yaw angular velocities. We refer readers to [12–14, 17] for various studies and their detailed treatments onfeedback control of the LST system.
Consider an LST system with external disturbance torques[12, 13], described by the following set of equations
φ+ w1θψ −Mx = b1u1
θ + w2φψ −My = b2u2
ψ + w3φθ −Mz = b3u3 (4)
where the respective unknown parameters are determined by
w1 =Iz − Iy
Ix, w2 =
Ix − IzIy
, w3 =Iy − Ix
Iz
b1 =K1
Ix, b2 =
K2
Iy, b3 =
K3
Ix
Mx = Ix(δ11 + δ12 sin(σt+ δ0)
)My = Iy
(δ21 + δ22 sin(σt+ δ0)
)Mz = Iz
(δ31 + δ32 sin(σt+ δ0)
)and δij , i = 1, 2, 3, j = 1, 2, δ0, σ are some uncertain constantsdepending on the inertia components, the magnitude of theLST dipole moment, and the earth’s magnetic field intensity.For details on the LST system modeling and descriptionsshown in Fig. 1, we refer the reader to [12, 13] for a derivationof (4). Table I shows some collected parameter and variableexplanations. It is noticed that the external disturbance torquesin each individual motion of the LST system share the samefrequency and initial phase, see [12]. In comparison with theaccurate nonlinear model (e.g. System (6.16) in [13]), wepoint out that the LST system (4) has ignored the possiblewhite noise processes, because of aerodynamics and solar-pressure torques. Quantifying the influence of such white noiseprocesses as well the optimal control problem is beyond thescope of this paper.
To formulate the system in a state-space description as (1)and (2), let us define the individual motion state as follows
x1 =
[x11
x12
]=
[φ
φ
]
x2 =
[x21
x22
]=
[θ
θ
]
x3 =
[x31
x32
]=
[ψ
ψ
](5)
which admits the form (1) with ri = 2 and
g1(x, v, w) = −w1x22x32 + d1(v, w)
g2(x, v, w) = −w2x12x32 + d2(v, w)
g3(x, v, w) = −w3x12x22 + d3(v, w).
Here v ∈ R3, w ∈ R
7, and di(v, w), i = 1, 2, 3 to be definedlater by (6), (7), and (8), which will cover the dynamics of (4)as a particular case by fixing initial condition (9).
Corresponding to exosystem (2), we may set v ∈ R3 and
v = S(σ)v, S(σ) =
[0 σ 0−σ 0 00 0 0
]. (6)
Then the disturbances can be equivalently given by
d1(v, w) = v1 + v3d2(v, w) = w4v1 + w5v3d2(v, w) = w6v1 + w7v3 (7)
for some defined uncertain parameters
w4 =Iyδ22Ixδ12
, w5 =Iyδ21Ixδ11
w6 =Izδ32Ixδ12
, w7 =Izδ31Ixδ11
. (8)
Clearly, if the above exosystem (6) starts with
v(0) =
[Ixδ12 sin δ0Ixδ12 cos δ0
Ixδ11
](9)
then its state response v(t) is such that
d1(v(t), w) = Mx, d2(v(t), w) = My, d3(v(t), w) = Mz.
Relating to the LST control system, one of the importantfeedback control problems is the disturbance accommodationor rejection of the nontrivial external torques Mx,My,Mz , see[12]. In [12–14, 17], the feedback control of LST has beenstudied essentially via decentralized controllers. It is naturalto reexamine the problem by the celebrated distributed controlstrategies, especially by networked controllers. In comparison,what makes our study distinct is as follows. For the nonlinearplant and without the initial region restriction, we studythe global distributed disturbance rejection problem with theclosed-loop system having a specific topology as shown in Fig.2. We shall call the problem a distributed disturbance rejection,cf. a disturbance attenuation problem of [8]. Additionally, weshall stress that our main objective is to demonstrate the designand implementation of a networked internal model.
13
![Page 3: [IEEE 2013 IEEE 3rd Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) - China (2013.05.26-2013.05.29)] 2013 IEEE International](https://reader042.pdfslide.us/reader042/viewer/2022030219/5750a49d1a28abcf0cabb819/html5/page/3.jpg)
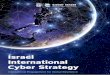
Fig. 1. LST spacecraft configuration [12] (SI: scientific instruments; SSM:support-systems module; OTA: optical-telescope assembly)
TABLE I. EXPLANATION OF MODEL VARIABLES AND PARAMETERS
Quantity Meaningφ roll angleθ pitch angleψ yaw angleK1,K2,K3 drive motor constantsMx,My,Mz external disturbance torquesIx, Iy, Iz principal moments of inertia
III. MAIN RESULT
In this section, we present a sufficient condition as wella solution to the disturbance rejection problem for system (1)with a disturbance source of (2) via a networked internal modelapproach. To solve the output regulation problem, a necessarycondition should be ensured on the solvability of the so-calledregulator equations (REs), see [6, 7]. For the concerned plantdynamics (1) and exosystem (2) shown in Section I, it can beeasily verified that the solution to their associated REs is
i ∈ O : xi(v, w) = 0, ui(v, w) = −b−1i gi(0, v, w). (10)
φ θ
ψ
v(t)
z1 z2
z3
d1(v, w) d2(v, w)
d3(v, w)
Disturbance source
↓ xi
ui ↑
Fig. 2. Topology of the closed-loop LST system (the wave line means thesubsystem interactions through angular velocities; the dotted line means theassigned communication channels between the controller stations.)
Moreover, each function ui(v, w) is a polynomial in v becauseof the polynomial condition of gi(x, v, w) in v.
For each ui(v, w), i ∈ O specified in the above, we mayconstruct an internal model with output ui in a decentralizedmode. The following summarized procedure may be taken toconstruct this class of internal models, see Chapter 6 of [6]for more details.
First, known from [4], we may calculate its zeroing poly-nomial
pi(s) = s�i − ai1 − ai2s− · · · − ai�is�i−1 (11)
for some integer i > 0 and a set of real numbers{aij � aij(σ)
}�i
j=1
depending on σ. The above zeroing polynomial pi(s) providesa steady-state generator of ui(v, w).
Define
τi(v, σ, w) = [τi1(v, σ, w) · · · τi�i(v, σ, w)]�
Φi(σ) =
[0 I�i−1
ai1 ai2, · · · , ai�i
]�i�i
Ψi = [1 0 · · · 0]1×�i
where τi1(v, σ, w) � ui(v, w) and along the trajectory of (2)
τij(v, σ, w) �d�i−1ui(v, w)
dt�i−1, j = 2, · · · , i.
Thus, we have a resulting steady-state input generator asfollows ⎧⎨
⎩∂τi(v, σ, w)
∂v· S(σ)v = Φi(σ)τi(v, σ, w)
ui(v, w) = Ψiτi(v, σ, w).(12)
Denote the generator (12) by {τi,Φi(σ),Ψi}.
Second, choose any controllable matrix pair (Mi, Ni) withMi being Hurwitz and solve the Sylvester equation
Ti(σ)Φi(σ)−MiTi(σ) = NiΨi (13)
which determines a unique and nonsingular solution Ti �Ti(σ).
Then, we have a translated generator{τi,Mi +NiΨi(σ), Ψi(σ)
}of ui(v, w) as follows⎧⎨⎩
∂τi(v, σ, w)
∂v· S(σ)v = Miτi(v, σ, w) +NiΨi(σ)τi(v, σ, w)
ui(v, w) = Ψi(σ)τi(v, σ, w)(14)
where
τi(v, σ, w) = Ti(σ)τi(v, σ, w), Ψi(σ) � ΨiT−1i (σ).
Consequently, by Definition 6.6 in [6], the generator (14)directly leads to the following internal model
ηi = Miηi +Niui (15)
with an output ui.
14
![Page 4: [IEEE 2013 IEEE 3rd Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) - China (2013.05.26-2013.05.29)] 2013 IEEE International](https://reader042.pdfslide.us/reader042/viewer/2022030219/5750a49d1a28abcf0cabb819/html5/page/4.jpg)
Condition 1: For a fixed index j ∈ O and for each i ∈O, i �= j, there is a pair of smooth vector functions
Ψi : S×W �→ Rli , λi : R
�j �→ Rli
for some integer li > 0 such that, for all (v, σ, w) ∈ Rnv ×
S×W
ui(v, w) = Ψ�i (σ,w)λi(τj(v, σ, w)).
Condition 1 says the potential relationship between thezeroing output manifolds ui(v, w) and one steady-state gen-erator’s state manifolds τj(v, σ, w), under which we mayconstruct a star-type controller network, similar to the regulatorstructure in [16], see Fig. 3 for an illustration.
We state the main theorem of this paper as follows.
Theorem 3.1: Under Condition 1, Problem 1.1 can besolved within a star-type controller network that contains onlyone internal model.
Remark 3.1: The above result can be shown based on aproblem conversion and a stabilization design for a tractableaugmented system in the light of [5, 9, 11]. The proof can bedone by a Lyapunov design or alternatively by a small-gain-theorem approach. One sketched Lyapunov design is suggestedin Section IV-B in a the case of ri = 2 and N = 3, inspired by[15], which can be carefully modified to the case of generalrelative degree. For the LST control, it will be shown thatCondition 1 can be guaranteed, because all the zeroing outputmanifolds are determined by homogeneous polynomials in theexosystem state variables and moreover of the same degree.The proof of Theorem 3.1 is omitted as well further discussionsand extensions of Condition 1 to some other general cases.
IV. ILLUSTRATION: DISTURBANCE ACCOMMODATION TO
LST SYSTEM
Continuing Section II, for the LST system with states (5)and the exosystem matrix (6), the associated zeroing outputmanifold can be determined by
u(v, w) =
[u1(v, w)u2(v, w)u3(v, w)
]=
⎡⎣ −b−1
1 (v1 + v3)−b−1
2 (w4v1 + w5v3)−b−1
3 (w6v1 + w7v3)
⎤⎦ . (16)
A. Verification of Condition 1
To apply Theorem 3.1, we need to verify Condition 1. Forthis purpose, notice that the function u1(v, w) in (16) satisfies(along the exosystem (6))
τ1(v, σ, w) =
[τ11(v, σ, w)τ12(v, σ, w)τ13(v, σ, w)
]
=
⎡⎢⎢⎣
u1(v, w)du1(v,w)
dt
∣∣∣(6)
d2u1(v,w)dt2
∣∣∣(6)
⎤⎥⎥⎦
=
⎡⎣−b−1
1 (v1 + v3)−b−1
1 σv2b−11 σ2v1
⎤⎦
and
d3u1(v, w)
dt3
∣∣∣∣(6)
= b−11 σ3v2
=[0 −σ2 0
]τ1(v, σ, w).
It determines a zeroing polynomial as follows
p1(s) = s3 − a11(σ)− a12(σ)s− a13(σ)s2
where a11(σ) = a13(σ) = 0 and a12(σ) = −σ2. Thus thesteady-state generator of u1(v, w) can be obtained⎧⎨
⎩∂τ1(v, σ, w)
∂v· S(σ)v = Φ1(σ)τ1(v, σ, w)
u1(v, w) = Ψ1τ1(v, σ, w)(17)
where
Φ1(σ) =
⎡⎣0 1 00 0 10 −σ2 0
⎤⎦ , Ψ1 = [1 0 0] .
Similar to what has been done in [15], we next solve theparameterized equation (13). By choosing a controllable matrixpair as follows
M1 =
[0 1 00 0 1
m11 m12 m13
], N1 =
[001
](18)
and solving the following regulator equation (whose solutionexists as long as M1 is moreover chosen to be Hurwitz)
T1(σ)Φ1(σ)−M1T1(σ) = N1Ψ1
we can get its parameterized solution T1(σ) as follows
T1(σ) =
[t11 t12 t130 t22 t230 t32 t33
]
where
t11 = − 1
m11, t12 =
m12 + σ2
ς�
t13 = − 1
m11σ2+
m11 −m13σ2
σ2ς�
t22 =−m11 +m13σ
2
ς�, t23 =
m12 + σ2
ς�
t32 =−σ2(m12 + σ2)
ς�, t33 =
−m11 +m13σ2
ς�
and where ς� is to denote
m211 +m2
12σ2 − 2m11m13σ
2 + 2m12σ4 +m2
13σ4 + σ6.
By setting (m11,m12,m13) = (−3,−4,−2), it can be ob-tained that
T−11 (σ) =
⎡⎣3 4− σ2 20 3− 2σ2 4− σ2
0 σ2(σ2 − 4) 3− 2σ2
⎤⎦ .
Next, viewing (v1, v2, v3) as unknown variables, solve thefollowing set of linear equations⎡
⎣−b−11 (v1 + v3)−b−1
1 σv2b−11 σ2v1
⎤⎦ = T−1
1 (σ)τ1(v, σ, w)
15
![Page 5: [IEEE 2013 IEEE 3rd Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) - China (2013.05.26-2013.05.29)] 2013 IEEE International](https://reader042.pdfslide.us/reader042/viewer/2022030219/5750a49d1a28abcf0cabb819/html5/page/5.jpg)
with τ1(v, σ, w) � T1(σ)τ1(v, σ, w). The above equation issolvable and we have an equivalent representation (in the senseof their required steady-state trajectories) of the exosystemstate (v1, v2, v3) as follows
v1 =[0 4σ2−σ4
b−11 σ2
3−2σ2
b−11 σ2
]τ1(v, σ, w)
v2 =[0 2σ2−3
b−11 σ2
σ2−4b−11 σ
]τ1(v, σ, w)
v3 =[
−3σ2
b−11 σ2
2σ4−8σ2
b−11 σ2
−3b−11 σ2
]τ1(v, σ, w).
Hence, the remaining functions u2(v, w),u3(v, w) in (16)can be respectively given by
u2 = Ψ�2 (σ,w)τ1(v, σ, w), u3 = Ψ�
3 (σ,w)τ1(v, σ, w)
with
Ψ2(σ,w) � −b−12 w4
b−11 σ2
⎡⎣ 04σ2 − σ4
3− 2σ2
⎤⎦− b−1
2 w5
b−11 σ2
⎡⎣ −3σ2
2σ4 − 8σ2
−3
⎤⎦
Ψ3(σ,w) � −b−13 w6
b−11 σ2
⎡⎣ 04σ2 − σ4
3− 2σ2
⎤⎦− b−1
3 w7
b−11 σ2
⎡⎣ −3σ2
2σ4 − 8σ2
−3
⎤⎦ .
Thus, Condition 1 has been verified for the LST system.
B. Regulator Design
After the internal model design, the basic method to com-plete the regulator design is to convert the output regulationto a stabilization problem, in particular to a decentralizedstabilization problem in the light of [5]. The designed internalmodel together with the plant dynamics will yield an aug-mented system. Then we will perform the stabilization designto a tractable augmented system derived by some equivalenttransformations.
First consider the 1st subsystem with the designed internalmodel specified by (15) and (18), which gives an augmentedsystem as follows⎧⎨
⎩η1 = M1η1 +N1u1
x11 = x12
x12 = b1u1 − w1x22x32 + d1(v, w).
(19)
For the system (19), define some coordinate and input trans-formations
η1 = η1 − τ1(v, σ, w)−N1b−11 x12
xi2 = kixi1 + xi2, i = 1, 2, 3
u1 = u1 − Ψ1η1 (20)
with some design real numbers ki > 0 and further define anadaptive control law
˙Ψi = −ciη1xi2, Ψi = Ψi − Ψi, i = 1, 2, 3 (21)
where Ψi is the estimation of Ψi and ci > 0 is a free designparameter.
Recall that in the last subsection
Ψ1τ1(v, σ, w) = −b−11 d1(v, w).
Then under (20) and by the following equation
b1Ψ1η1 + d1(v, w)
= b1Ψ1η1 − b1Ψ1η1 + b1Ψ1η1 − b1Ψ1τ1(v, σ, w)
=(b1Ψ1η1 − b1Ψ1η1
)+
(b1Ψ1η1 − b1Ψ1τ1(v, σ, w)
)= b1Ψ1η1 + b1Ψ1η1 + b1Ψ1N1x12
we have the translated augmented subsystem as follows⎧⎪⎨⎪⎩
x11 = −k1x11 + x12
˙η1 = M1η1 + f0(x,w)
˙x12 = b1u1 + b1Ψ1η1 + f1(x,w)
(22)
where
f0(x,w) = M1N1b−11 x12 +N1b
−11 w1x22x32
f1(x,w) = k1x12 − w1x22x32 + b1Ψ1η1 + b1Ψ1N1x12.
In a very similar manner, consider the 2nd and 3rd subsys-tems under the following new inputs
u2 = u2 − Ψ�2 η1, u3 = u3 − Ψ�
3 η1
which together with (20) manifest the following equations{xi1 = −kixi1 + xi2
˙xi2 = biu2 + b2Ψ�2 η1 + fi(x,w), i = 2, 3
(23)
for appropriate functions fi(x,w), i = 2, 3.
It is noticed that the above derived augmented system takesa decentralized form if xi2 is viewed as the subsystem output,which is strictly general than the decentralized output-feedbackform [8]. In particular each isolated subsystem has the unityrelative degree [15].
To stabilize the augmented system of (19) and (23) at(x, η1) = 0 in a decentralized mode, we may construct acontrol Lyapunov function candidate in the form
U(x, η1, Ψ1, Ψ2, Ψ3)
=3∑
i=1
(∫ Vi
0
βi(s)ds+1
2x2i2 +
bi2ci
Ψ�i Ψi
)+ k0η
�1 P1η1
where βi(s) is some continuous and nondecreasing functionand k0 > 0 both of which need to be specified, Vi = 1
2x2i1,
and P1 is some positive definite matrix satisfying
P1M1 +M�1 P1 = −I.
By suitably assigning functions βi(s), i = 1, 2, 3 and thereal number k0 > 0, it may lead to a stabilization control law
ui = κi(xi1, xi2), i = 1, 2, 3 (24)
and existence of some smooth and positive definite functionχ(·) such that, along the closed-loop system composed of (19),(23), (21), and (24)
U ≤ −χ(‖x‖) (25)
for all (x, η1, Ψ1, Ψ2, Ψ3) in their respective entire spaces andall (v, w, σ) in their known compact sets.
16
![Page 6: [IEEE 2013 IEEE 3rd Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) - China (2013.05.26-2013.05.29)] 2013 IEEE International](https://reader042.pdfslide.us/reader042/viewer/2022030219/5750a49d1a28abcf0cabb819/html5/page/6.jpg)
z1 z2
z3
z4z5
z6
Fig. 3. The star-type controller network under Condition 1 with j = 1 andN = 6.
0 10 20−0.6
−0.4
−0.2
0
0.2
0.4
0 10 20−1
−0.5
0
0.5
1
1.5
0 10 20
−0.4
−0.2
0
0.2
0.4
0 20 40
0
1
2
3
0 10 20 30
0
2
4
6
8
0 10 20 300
2
4
6
8
x1
x2
x3
η1
estimation of Ψ2estimation of Ψ3
estimation of Ψ1
Fig. 4. State responses of the closed-loop system.
For the closed-loop system with the above obtained Lya-punov inequality (25), the result can be shown by the wellknown LaSalle’s invariance principle that clearly ensures theconvergence of the state variable x. Thus it implies that theoriginal disturbance rejection problem is solved.
C. Simulation and Remark
The simulation is done and one result is shown in Fig. 4with a set of randomly chosen test values/parameters, whereeach pair of column plots are for the subsystem’s motion stateand sub controller state responses, respectively.
Remark 4.1: Note that for the LST system, the distur-bance rejection can also be solved by a decentralized regulator,i.e. all the communication channels in the controller levelmay be blocked, see the dotted line in Fig. 2 for instance.This case may be seen as a marginal case of Theorem 3.1without Condition 1 for systems (1) and (2) specified in thefirst section.
V. CONCLUSION
We have studied a global disturbance rejection problem fora class of nonlinear multi-stationed and interconnected systemsby a distributed control. Due to the system uncertainties, theconstructed internal model network would be uncertain. Tohandle this issue, it has been shown that under some condition,an adaptive control technique can be incorporated to solve theproblem. The result has been demonstrated by a disturbancerejection problem of a triple-stationed LST control system,due to the external disturbance torques. An interesting issuesuspended in the paper is to further study the parameterconvergence of the adaptive variables in the designed controller[10]. Some other interesting direction is on the output-feedbackregulator design, for the example of the LST systems and in thesemi-global stabilization category, the second-step stabilizerdoes not rely on the angular velocities.
ACKNOWLEDGMENT
The work was substantially supported by the National Nat-ural Science Foundation of China under grant No. 61004048.
REFERENCES
[1] C.I. Byrnes, F.D. Priscoli, and A. Isidori. Output Reg-ulation of Uncertain Nonlinear Systems, Boston, MA:Birkhauser, 1997.
[2] Z. Chen and J. Huang. Attitude tracking and disturbancerejection of rigid spacecraft by adaptive control, IEEETrans. Automat. Contr., vol. 54, no. 3, pp. 600–605, 2009.
[3] Z. Chen and J. Huang. Parameter convergence analysis inadaptive disturbance rejection problem of rigid spacecraft,Proceedings of the 10th World Congress on IntelligentControl and Automation, pp.1418–1423, Beijing China,July 2012.
[4] J. Huang. Remarks on the robust output regulation problemfor nonlinear systems, IEEE Trans. Automat. Contr., vol.40, no. 6, pp. 2028–2031, 2001.
[5] J. Huang and Z. Chen. A general framework for tacklingoutput regulation problem, IEEE Trans. Automat. Contr.,vol. 49, no. 12, pp. 2203–2218, 2004.
[6] J. Huang. Nonlinear Output Regulation: Theory and Ap-plications, Philadelphia, PA: SIAM, 2004.
[7] A. Isidori. Nonlinear Control Systems, 3rd Edition,Springer, 1995.
[8] Z.-P. Jiang, D.W. Repperger, and D.J. Hill. Decentralizednonlinear output-feedback stabilization with disturbanceattenuation, IEEE Trans. Automat. Contr., vol. 46, no.10,pp.1623–1629, 2001.
[9] I. Karafyllis and Z.-P. Jiang. Stability and Stabilization ofNonlinear Systems, Springer, 2011.
[10] L. Liu, Z. Chen, and J. Huang. Parameter convergenceand minimal internal model with an adaptive output regu-lation, Automatica, vol. 45, no. 5, pp. 1306–1311, 2009.
[11] L. Liu, Z. Chen, and J. Huang. Global disturbancerejection of lower triangular systems with an unknownlinear exosystem, IEEE Trans. Automat. Contr., vol. 56,no.7, pp. 1690–1695, 2011.
[12] W.O. Schiehlen. A fine pointing system for the largespace telescope, NASA Report, No. NASA TN D-7500,NASA, Washington, D.C., 1973.
[13] D.D. Siljak. Large-Scale Dynamic Systems: Stability andStructure, Academic Press, Inc., New York, 1979.
[14] D.D. Siljak, M.K. Sundareshan, and M.B. Vukceviu. Amultilevel control system for the large space telescope,NASA Contract Report, No. NAS 8-27799, University ofSanta Clara, Santa Clara, California, 1975.
[15] D. Xu and J. Huang. Robust adaptive control of a class ofnonlinear systems and its applications, IEEE Transactionson Circuits and Systems-I: Regular Papers, vol. 57, no. 3,pp. 691–702, 2000.
[16] D. Xu and Y. Hong. Distributed output regulation designfor multi-agent systems in output-feedback form, The12th International Conference on Control, Automation,Robotics and Vision, pp. 596–601, Guangzhou, China, 5-7December 2012.
[17] D.-Z. Zheng. Decentralized output feedback stabilizationof a class of nonlinear interconnected systems, IEEETrans. Automat. Contr., vol. 34, no. 12, pp. 1297–1300,1989.
17