Embed Size (px)
Citation preview
![Page 1: [IEEE 2012 20th Iranian Conference on Electrical Engineering (ICEE) - Tehran, Iran (2012.05.15-2012.05.17)] 20th Iranian Conference on Electrical Engineering (ICEE2012) - Evaluation](https://reader042.pdfslide.us/reader042/viewer/2022020313/575082441a28abf34f983eba/html5/page/1.jpg)
20th Iranian Conference on Electrical Engineering, (ICEE2012), May 15-17, Tehran, Iran
Evaluation of Power System Stability by UPFC via Two shunt Voltage-Source Converters and a Series
Capacitor Ebrahim Babaei
Faculty of Electrical and Computer Engineering, University of Tabriz,
Tabriz, Iran, e-mail: [email protected]
Abstract-In this paper, the effects of a newly presented unified
power flow controller (UPFC) structure, which is based on two
shunt voltage-source converters and a series capacitor, is
investigated on the dynamic stability of power system. To reach
to this purpose, it was suggested a non-linear dynamic model for
a sample power system that a proposed UPFC was installed on.
From non-linear dynamic model, it was suggested a linear
dynamic model and modified Heffron-Philips model. Then, by
modifying of damping controller for proposed UPFC and
regulating UPFC controller parameters by phase compensation
technique, the most appropriate and effective entering signal was
chosen among controlling signals of proposed UPFC by different
technique.The validity of the theoretical facts is then well
confirmed by simulation results obtained in MATLAB/Simulink.
Keywords-UPFC; FACTS devices; damping; low frequency
oscillations; modified Heffron-Philips model
M
X,e,k k = a, b, c
X j i= d, q
X ; X bv Xle Cdc -Cse Ib i =d,q
Ise,i i =d,q
IE,g,i g=I,2 i=d,q
V dc V,e,k k = a, b, c
Vb V I Pm Pe
NOMENCLATURE
Inertia constant
Reactance of capacitor in k phase
Steady state synchronous reactance of the generator on i axis
Direct axis transient reactance
Reactance of transmission line
Reactance of transformer
Installed capacitor
Current in infinite bus on i aXIs
Current of phase k in transmission line on i axis Current of phase k in series capacitor on i axis Current in converter g on i axis
Voltage at dc link
Series capacitor voltage
Voltage at infinite bus
Voltage at generator terminal
Input mechanical power
Electrical power of the generator
978-1-4673-1148-9112/$3l.00 ©2012 IEEE 318
Farzad Mohammadzadeh Shahir
Department of Electrical Engineering, Ahar Branch, Islamic Azad University,
Ahar, Iran, e-mail: [email protected]
Kc ,Ko ,KL ,KM (s) S S}',g g = 1,2
m}',g g = 1,2
Dm Dupree Ku Ka KI-KI2 Kc,uk' Kp,uk' Kg,uk' KI',uk' Kse,uk Kqd ,K pd ,Kvd T ;"
Ta r; ,y;,r; ,�,r;J,Tw (s)
I.
UPFC damping controller transformer controls Phase angle of System load Phase angle of shunt converter g
modulation index of converter g
Friction factor of generator Friction factor of the UPFC damping controller UPFC controller gain
Gain of A VR in generator Constants of modified HeffronPhillips model
Constants control of input signals
Constant control of input signal
Direct axis open circuit time constant of the generator Time constant of the AVR
Time constants of phase compensator
INTRODUCTION
Power system stability is defined as the ability of an electric power system, for a given initial operating condition, to regain a state of operation equilibrium after being subjected to a physical disturbance [I]. Power system stability can be improved through the use of dynamic controllers such as power system stabilizers (PSS) [2], excitation systems, and more recently flexible ac transmission systems (FACTS) devices [3]. To effectively design the controller, proper modeling of the generators, controller dynamics, and the network must be utilized. A power system is usually modeled using a combination of differential and algebraic equations. Incorporating the differential and algebraic equations into the control process is difficult and is made more complex by inclusion of FACTS devices such as the UPFC. UPFC is one of the most important members of the FACTS family that was developed by Gyugyi in 1991 [4]. UPFC can control several parameters of power system in the same time includes controlling of active and reactive power distribution, voltage
![Page 2: [IEEE 2012 20th Iranian Conference on Electrical Engineering (ICEE) - Tehran, Iran (2012.05.15-2012.05.17)] 20th Iranian Conference on Electrical Engineering (ICEE2012) - Evaluation](https://reader042.pdfslide.us/reader042/viewer/2022020313/575082441a28abf34f983eba/html5/page/2.jpg)
control, impedance and phase angle. It was suggested different structures for UPFC. One of these suggested structures for UPFCs, is based on two shunt converter and a series capacitor [5]. This structure has some more advantages rather than common suggested UPFC by Gyugyi that includes reduction of THD coefficient of injected voltage, ability of using of series capacitor as fixed series capacitor compensation, and increase of protecting level. In this paper, we want to evaluate the effect of new suggested structure of UPFC on stability of power system. For this, we suppose that the studied UPFC in power system is a single machine that was connected to infinite bus. At first, we suggest the non-liner model for investigated power system. Then, we achieve linear dynamic model by linearized non-liner dynamic model around the operation point. It is suggested a modified Heffron-Philips model for stability studies from prepared liner model. Finally, we modify the most appropriate controlling parameter of UPFC new structure for keeping the stability of investigated power system by phase compensation technique [6] and simulation results of investigated power system.
II. INVESTIGATED POWER SYSTEM
A. Power System Structure
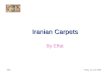
The single line diagram of investigated power system is shown in Fig. 1. The proposed UPFC is installed in a single machine infmite bus (SIMB). The proposed UPFC consists of two parallel transformers, a series capacitor and two shunt voltage-source converters controlled by pulse width modulation (PWM) technique that its dynamic modeling was described in [7]. Here, R JC,I and R JC,2 (equivalent resistances)
are neglected in comparison with X },',I and X }, ,2 (excitation
transformers), respectively.
I �Vh ��----��----��d �
I '
UPFC
Figure I. Single line diagram of investigated power system
B. Damping Controller
The operation conditions of the investigated system depend on the generator operating point, power system conditions, and the UPFC input signal. The generator rotor angle deviates from its synchronous state and the electromechanical oscillations arise as the distortion occurs in power system. The aroused electromechanical oscillations spread in whole power system and threat system stability if there is no proper damping controller in power system structure. As shown in Fig. 1, the UPFC controller installed in
319
power system attenuates the occurred electromechanical oscillations using the input signals. The generalized model of UPFC in power system (Fig. 1.) can be shown as Fig. 2. This model is obtained generalizing the model, which is presented for the FACTS devices installed in power system [8]. The equation in Fig. 2 can be considered as follow [8]:
(I)
(2)
In (I), k HI and d m are the synchronizer and damper
components, respectively, and Z HI consists of other state
variables. The angular frequency of the oscillation is
calculated by CO; = �OJokm . In this paper, the UPFC damping
controller is considered to be ideal. Therefore, the torque created by UPFC damping controller is a pure positive torque makes rotor angle to be stable and maintains the dynamic stability of the system against the probable distortions and is calculated as follows [8]:
(3)
In (3), DUPre attenuates the oscillations of generator rotor.
Relation (3) can be stated as follows [8]:
DUl'FC = (Kc (s)Ko(s) + DUl'FCKL (s) )H(s)
= F(s)H(s). (4)
In (4), forward path of the UPFC damping controller, F(s) is a function of power system operation and is defined
as follows [8]:
(5)
c. UPFC Controller
H (s) that was shown in Fig. 2, is called proposed UPFC
controller and its task is controlling the studied power system. Designing H (s) for the UPFCs usually applied in power
systems is presented in [9]. H (s) can be considered as
follows generalizing from [9]:
H(s)= � . � . 1+sT2
• l+sT4
. 1+s� I+s� I+s� 1+s�
(6)
In order to design damping controller, (5) and (6) can be rewritten as follows using phase compensation technique [6]:
![Page 3: [IEEE 2012 20th Iranian Conference on Electrical Engineering (ICEE) - Tehran, Iran (2012.05.15-2012.05.17)] 20th Iranian Conference on Electrical Engineering (ICEE2012) - Evaluation](https://reader042.pdfslide.us/reader042/viewer/2022020313/575082441a28abf34f983eba/html5/page/3.jpg)
H(s)= IH I LB. (7)
F(s) = IFIL¢. (8)
Tn (7) and (8), IHI and IFI are amplitude, and B and ¢ are phase angle for H (s) and F(s) , respectively. In phase
compensation technique designing, the damping controller is able to generate pure positive torque in order to damp the oscillations of the generator rotor. In each F(s) , it is possible
to achieve positive torque adjusting the H (s ) parameters.
Applying (7) and (8) on H (s) and F(s) , the following
relation is obtained for the phase compensation technique based design and H (s) parameters are regulated [9]:
H = DUPee
F LB=L-¢. (9)
Figure 2. The closed loop block diagram for UPFC damping controller
Ill. PROPOSED DYNAMIC MODELLING
A. Proposed Nonlinear Dynamic Model
For the investigated power system, by considering all reactance and resistances of the generator, transformers, and transmission line, we can provide the following non-liner equations:
P -P -D l1w m== HI e
m
M
. -E +E'd E' = q ./' q T' do
v = _1-1 for i = d,q. .Ie ese se,1
(10)
(II)
(12)
(13)
(14)
320
Vdc = :?,l [ cos 0re,1 sin Ore, I ] [�re' l' d j de },' ,l,q
+ 3m}',2 [cos Ore 2 sin ore 2J [/re,2,d j. 4Cdc " " I}',2,q Where the followings are valid in (10)-( 15):
Pe =V"d1"d +V"ql"q V , =V"d + j V"q V =X 1 I,d q l,q 1 =1 , +1 '1 =1 +1 . l,d se,d F.,l,d' l,q se,q F.,l,q'
B. Proposed Linear Dynamic Model
(15)
A linear dynamic model is obtained by linearizing the nonlinear model around an operating condition. The linearized model is given below:
M -M -Dl1w l1dJ= m e . M
. -l1E + l1E'd M' = q ./' q
T' do
. -Mfd + Ka(l1v'ef -l1V,) l1E fd = ----"-----"------. T
a
l1Vde = K7l10 + Kgl1E; -K9l1Vde + Kc,re,ll1mre,1 + Kc,O},,1l10},,1 + Ke,},,2l1m},,2 + Kc,O},,2l10},,2'
l1V,e = KI0l10+KIIE; + Kdl1mre,2 + K,2 l1mre, I + K12l1Vde + K\3l10}',2 + K'4l10}',I'
Where the followings are valid in (16)-(21):
� = KIl10 + K2M; + Kp,re,ll1mre,1 + Kp,ore,Il10re,1 + K",re,2l1mre,2 + Kp,ore,2l10re,2 + Kpdl1Vdc'
l1V, = Ksl10 + K6M; + K",}',Il1m}',1 + K",O},,1l10},,1 + K,.,re,2l1mre,2 + K,.,ore,2l10re,2 + K,.dl1Vdc·
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
The constant values of (20)-(24) are presented in details in appendix A.
![Page 4: [IEEE 2012 20th Iranian Conference on Electrical Engineering (ICEE) - Tehran, Iran (2012.05.15-2012.05.17)] 20th Iranian Conference on Electrical Engineering (ICEE2012) - Evaluation](https://reader042.pdfslide.us/reader042/viewer/2022020313/575082441a28abf34f983eba/html5/page/4.jpg)
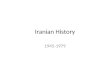
C. The Proposed Modified Heffron-Philips Model
The modified Heffron-Philips model could be proposed for the investigated system considering ( 16)-(2 1) linear equations. Fig. 3 shows the proposed modified Heffron-Philips block diagram, in which the operation of UPFC is controlled by the linearized I1mrc,] , I1mrc,2' 110rc,] , and 110rc,2 control signals.
The block diagram of the proposed modified Heffron-Philips model shown in Fig. 3, holds 35 constants. These constants can be considered as the row input vectors to decrease the calculations complexity. The input row vectors are defined as follows:
Kp,uk = [Kp,rc,] Kp,orc,] K",rc,2 K",orc,2]. (25)
Kg,lIk = [Kq,le,] Kq,Ole,] Kg,le,2 Kg,b'leJ· (26)
KI',uk = [K",rc,] KI',orc,] K",rc,2 K",orc,2 ]. (27)
Kc,lIk = [Kc,le,] Kc,b'le',] Kc,le',2 Kc,b'le,2]. (28)
Kse,llk = [Ks,rc,] Ks,orc,] Ks,rc,2 K"orc,2]. (29)
The row vectors of (25)-(29) are applied on the proposed modified Heffron-Philips system as the following input vector according to the UPFC input signal:
(30)
Figure 3, The proposed modified Heflion-Philips model
D. The State Equations of the Investigated System
Based on ( 16)-(24), the dynamic model of the investigated system in form of the state space equation can be expressed as follows:
X=AX+BU. (3 1 )
32 1
Where X and U are defined as follows:
X =[110 11m 11£' q Mfd I1Vdc M"J. (32)
U = [l1mrc,] 110rc,] I1mrc,2 110rc 2t. (33)
A and B matrixes of (3 1) are considered as follows:
0 l4J 0 0 0 0
K] 0 K2 0
Kpd 0
M M M
K4 0 K3 Kqd
0 A= r;o r;o T;o r;o
KuKs KuK6 KaK,u (34) 0 0
� � � � K7 0 Kg 0 -� 0
K]O 0 Kll 0 K]2 0
0 0 0 0
KI',h,,] KI',!5h,,] KI',h,,2 KI',!5h,,2 M M M M
K _ q,E,l K _ q,b'E,1 K _ q,E,2 K _ q,oE,2 B= T;o r;o r;o T;o
K)<",h'! K)<,!5h,] K)<,Y2 K"J("OF,2 (35) ---- ----
1;1 1;1 � � Kc,h,,! Kc,!5h,,! Kc,h,,2 Kc,OF.2
K,y,! K,,!5h,,] K,Y2 K"OF.2 It is possible to design an appropriate controller using (3 1)
and selecting the most proper input signal of UPFC from four input signals with criterions detailed in the next section in order to maintain the stability and to control the damping of power system against the rotor oscillations of investigated system's synchronous generator.
IV. SIMULATION RESULTS
A, UPFC Controller Parameters Regulation
The system operation condition in 'I'(,u) domain is shown
in Table I. As mentioned before, the UPFC controller parameters are regulated applying phase compensation technique and displace the eigenvalues. As the system eigenvalues is less in terms of a specific input signal in damping controller, the input signal is more effective in damping controller and as the UPFC controller gain is less, lower K[J , the UPFC damping controller can be designed and
utilized with lower cost. It is initially visualized that the control system is stabilized for all 'I'(,u) values if the control
system is designed under ,u2' while this requires further
attention especially about the UPFC device applied in this paper whose operation is controlled by four input signals of
![Page 5: [IEEE 2012 20th Iranian Conference on Electrical Engineering (ICEE) - Tehran, Iran (2012.05.15-2012.05.17)] 20th Iranian Conference on Electrical Engineering (ICEE2012) - Evaluation](https://reader042.pdfslide.us/reader042/viewer/2022020313/575082441a28abf34f983eba/html5/page/5.jpg)
Am le,1 ' Am le ,z , A0le,1 , Aole,z ' The UPFC controller
parameters applied in this paper are as TI = 0,9s ,T3 = 0,9s , Til = 0,0 Is , and T" = 1 Os , Other UPFC controller parameters
are obtained from (9) by input signal change, The system eigenvalues and other UPFC damping controller parameters are respectively shown in Tables II and III under III and 112 in tenns of different input signal. Based on the results shown in Tables II and III, the most appropriate signals for UPFC controller input under III and Ilz is ore ,I from effectiveness
point of view and is m le ,z from costs view-point.
TABLE I. OPERA nON CONDITION IN 'I'(,u) DOMAIN
operation condition V t V b r;, ,u, 1.0pu 1.0pu O. lpu
,u, 1.0pu 1.0pu 1.0pu
TABLE II. UPFC CONTROLLER PARAMETERS UNDER ,u,
Input lIPFC controller parameters Eigenvalues mlJ',l K" =0.9 T, = 0.2 T4=0.15 s = -0.1302±jO.0460
iSRI Ku=2.3 T, =0.12 T, =0.10 s = -0.4718+ jO.3120
mt.-.2 Ku =0.6 T, = 0.65 'L. =0.09 s = -0.1368±jO.0101
iSR, Ku =0.9 T, = 0.55 T, = 0.20 s = -0.2381±jO.1167
TABLE 111. UPFC CONTROLLER PARAMETERS UNDER ,u,
Input lIPFC controller parameters Eigenvalues
mt.-.l K" = 1.1 T, = 0.95 T, = 0.95 s = -0.0470±jO.0747
iSR•1 Ku = 0.65 T, = 0.25 T, =0.15 s = -0.2074 ± jO.3264
mlJ',2 Ku =0.3 T, = 0.72 'L. =0.65 s = -0.0727 ± jO.0241
is",, Ku=3.3 T, = 0.65 'L. = 0.45 s = -0.0903 ± jO.0003
B. Nonlinear Analysis
Now, the system assumed in Fig. 1 is simulated under relations mentioned in (10)-(15). The aim is the way system responds to sudden load variation caused by distortions. Simulation according to Table I and appendix B in presence of distortion at the time of 1.0s is done for power system. In this simulating process, we use dual damping controller of UPFC that composed of two separated damping controller, and finally introduce the most appropriate dual damping controller of UPFC. The simulating results with distortion in presence and lack of dual damping controller of UPFC were shown in Fig. 4 under III and Ilz .According to the results shown in Fig.
4(a), the system stability is reinforced and the oscillations are rapidly attenuated under III and applying Ole,1 - mle,I' while
the system damping is slow under 0re,2 - mre,z condition and
would defect the devices placed in power system. Also, according to the results shown in Fig. 4(b), under 1l2' the
system is more stable against the oscillations with Ole,1 - mle,1 ' it is not reliable with mre,1 - mre,2 and the oscillations are
attenuated very slowly.
322
without UPFC damping controller
1111:.1-m}:'.2- Op.1 -mp2
0t:.2-mt:2- °n-°t:.2-OL-----�------�-=���----�----�
60
55
50
45
o 2
without UPFC damping controller
4 6 (a)
8 10
ORJ -mF.J - 8F._2 -mRJ-
mF.J -mR2 - JiJ',l -mlJ'.2
iSR, -mHO - iSRI - OR' -
40 L-----�------�----�------�----� o 2 4 6 8
(b)
Figure 4. Simulation results, (a) under ,u, , (b) under ,u,
V. CONCLUSIONS
10
Although several approaches are used to select proper input signals, different standards can be considered to select such signals for UPFC damping controller installed in power systems. In this paper, by giving some methods, choosing of suitable entering signal was considered. Then, with dual damping controller, the stability of power system in the case of different cases of controller signals, was considered. When we take just the stability of rotor angle and power system in choosing of damping controller signal of UPFC, mle,2 can
enter in all domain of \f(Il) in system and damps the
oscillation quickly. If we would like to consider the economical problems and decrease the costs, 0le,1 can be the
best one for designing damping controller. The stability of the controllers designed in power system is significantly important. The stability of the designed controller can be explained as such statement that the damping controller input signal is effective in all \f(Il) domains and operates
invariably. By considering mre,1 , we can be sure about stability
of the controller designed in all \f(Il) . Also, if it is used dual
damping controller, by choosing of Ore, I - mre,1 , the stability of
power system was developed so well.
ApPENDIX A
The constants used in (16)-(24) are as follows:
X HH =X re ,2 +X "v X al =Xsc +X re ,IX,e +X,cXse X a2 =X RHX re ,1 ; X a3 =X re ,2X re ,1 ; X hi =X re ,1 +X,c X "2 =X re ,2X ", ; X "3 =X RRXsc ; XI =Xa1Xa2 +X "IX "2
![Page 6: [IEEE 2012 20th Iranian Conference on Electrical Engineering (ICEE) - Tehran, Iran (2012.05.15-2012.05.17)] 20th Iranian Conference on Electrical Engineering (ICEE2012) - Evaluation](https://reader042.pdfslide.us/reader042/viewer/2022020313/575082441a28abf34f983eba/html5/page/6.jpg)
X =X . +XhVX,e . = [X aJ(X,c -X le,I) ], =[-XaJX'C ) ' 2 m' , al , a2 , Xle,1 X IX rc,1 XIXrc,1
a = (1- jX2Xa3) b l = [(X rc,1 -X ,J(X a3 +X a2) ] 3 jXRR X IX /C,l
b2=[X,e(Xa3-Xa2) ] b3=[X2(Xa3+Xh2)+[ Xrc,2 )] XIX rc,1 XRR Xrc,1XRR
CI = [(Xa2 +XbJ +Xb2)(Xle,1 -X,J+ jXI ] XIXrc,1
C2 = [X,e (Xa2 + Xb3 + Xb2) - jXI ] XIXle,1
Xle l C = ' 3 jXBB [ -Xbv + jX2Xle/XaJ + Xb3 + Xa2) ]
dl = [(X,e -Xrc,I)(Xb3 +Xh2)- jXI ] XIXle,1
d2 = [-X,e(XbJ + Xb2)+ jXI ] XIXrc,1
dJ = _._1_ [_ jX2 (XbJ + Xb2) + [ Xbv )] jXRR Xrc,1
KI =s(al +a2)Vz, coso-s(al +a2)Vz, sino
K2 = (�,d -X;I"q)(cl +C2) ; K3 = 1+(Xd -X;)(ci +C2) K 4 =-(al +a2)V b sino;K6 =(ci +C2)+W7 Ks = (al + a2)X;V;, sin 0+ (al + a2)w7XqV;, cos ° K7 = WI2 aJ m le,2 Vz, (cos ° sin ole ,2 -sin ° cos ole ,2 )
+ wl2a2mrc,1 Vb (cos ° sin 0rc,1 -sin ° cos 0rc,l) Kg = wl2c3mrc,2 (cos °rc,2) + wl2c2mrc,1 (cos 0rc,l) K9 = -wI2mrc,2 U; cos 0rc,2 + J; sin 0rc,2)
- WI2 m le I Ch cos ole I + /4 sin ole I) KIO = -2w13�IV;, (sin ° +'
cos 0) ; KI I '= 2w13cI KI2 = WI3 bl m le,2 cos 0le,2 + wlJ dl m le,1 cos ole,! K"le,1 = wlJ dl V::k (cos ole,! + sin ole,!) ; K"le,2 = wlAVdc cos ole ,2 K,,6le,1 = wl3dlmle,IVdc COS0le,l ; K,,6le,2 = wlJblmle,2Vdc cos Ole ,2 Kgd = wSmle,2 cos 0le,2 + w6mle,1 cos ole,! Kpd = (V::,d -X;I"q) [ wsmrc,2 cos 0rc,2 + W6mrc,1 cos 0rc,1 ] Kl'd = w7 [ wsmrc,2 sin 0rc,2 + W6mrc,1 sin 0rc,1 ] Xq Kq,le,1 = W6Vdc cos Ole,1 ; Kq,le,2 = wSr:e cos 0le,2 Kg,6le,1 = -w6mle,IVde sin ole,! ; Kg,6le,2 = -wSmle,2Vdc sin Ole ,2 Kp,rc,1 = W6[(�,d -X;I"q) cos 0rc,1 + (�,q + X/I,d ) sin 0rc,1 ]Vdc K p,le,2 = sWs Vdc sin Ole ,2 -(al + a2 )(V::,d -X;I"g)Vz, sin ° Kp,6le,1 = w6[s cos Ole ,I -(fI"d -X;I"q)sin 0le,l]mle,IVdc Kp,6le,2 = swSmle,2Vde cos 0le,2 -swSmle,2Vde sin 0le,2 Kc,6le,1 = 0.5wI2d3mle,2mle,IVde( -sin ole,! + sin 0le,2) + wJ Kc,orc,2 = 0.5wI2b3mrc/Vdc (-cos 0rc,1 + cos 0rc,2) + w4
323
Kc,le,1 = 0. 5WI2d3mle,2Vde(COS 0le,1 cos 0le,2 + sin 0le,1 sin Ole,2) + 0. 5wI2d2mle,IVde(cos Ole/ +sin0le/ )+wI
Kc,rc,2 = 0. 5wI2b3mrc,2Vdc(COS Orc/ +sin orc/)+ w2 + 0. 5w12b2mle IVd' (cos ole 2 cos Ole I + sin ole 2 sin ole I)
KI',rc,1 = W6 [ W7Xq 'Sin
'Orc,1 - w�X; cos 'Orc,1 ] Vdc
' ,
KI',rc,2 = w7 WsXqVdc sin 0rc,2 - WSX;Vdc cos 0rc,2 KI',orc,1 = w6X;mrc,1 Vdc sin 0rc,1 + W7Xqm6 Kv,6le,2 = w7 wSXgmle,2Vdc cos 0le,2 + wSX;mle,2Vdc sin Ole ,2 1; = wSmle,2 cos 0le,2 + w9mle,1 cos Ole ,I J; = wSmle,2 sin 0le,2 + W9 mle ,I sin Ole ,I h = wlOmle,2 cos 0le,2 + wl lmle,1 cos Ole ,I h = wlOmle,2 sin Ole ,2 + wllmle,1 sin Ole ,I WI = WI2Irc,1,d COS Orc,1 + wI2Irc,l,q sin 0rc,1 w2 = wI21 rc,2,d cos 0rc,2 + wI21 rc,2,q sin 0rc,2 W3 = vmrc,11 rc,l,q cos 0rc,1 - wl2mrc,11 rc,l,d sin 0rc,1 w4 = w12mrc,21 rc,2,q cos 0rc,2 - w12mrc,21 rc,2,d sin 0rc,2
bl + b2 dl + d2 V::,d b3 d3 Ws =--2- ; W6 =--
2- ; w7 =--v; ; Ws =2 ; W9 2
_b2• _d2• _ 3, I WIO - - , wll -- , WI2 - -- , wn = --. s = V + X I 2 2 4Cdc ' 2Cse' ',g q ',d
ApPENDIXB
The power system features in simulation are as follows:
ole,! = 30 ; 0le,2 = -25 ; X / = 0.3pu ; Vde = E� = 2Vz, = 2.0 pu Xle,1 = Xle,2 = 2X" = 2X'e = 2Xbv = 2Xd = 3Xq = 0. 2pu ; Cdc =C ,e =3.0pu ; mle,1 =mle,2 =1 ; ; M = 2H =8.0s ; / = 50Hz' T ' = 5 044s . T = 0 0 5s . K = 50' D = 0 s ' do ' ' a ' ' a '
m
REFERENCES
[I] p, Kundor, Power system stability and control, New York: Mc, Graw Hill, 1994,
[2] H.J, Wang, J, Min, J, Ma, H,Y, Wang, H.J, Fu, and Y,y, Hu, "A study on PSS parameters optimizing for multiple low frequency oscillation modes," in Proc, APPEEC, 2011, pp, 1-4,
[3] AM. Shan Jiang Gole, UD, Annakkage, and DA Jacobson, "Damping performance analysis of IPFC and UPFC controllers using validated small-signal models," IEEE Trans, Power Deli" vol. 26, pp, 446-454, Jan, 2011.
[4] N,G, Higorani and 1. Gyugyi, Understanding FACTS: concepts and technology of flexible ac transmission systems, New Jersey: IEEE Press, 1999,
[5] AK, Sadigh, MT Hagh, and M, Sabahi, "Unified power flow controller based on two shunt converters and a series capacitor," Elsiver journal of Electric Power System Research, vol. 80, pp, 1511-1519, Dec, 2010,
[6] F.M, Shahir and E, Babaei, "Evaluating the Dynamic Stability of Power System Using UPFC based on Indirect Matrix Converter," in Proc, ICECT, 2012, pp, 554-558,
[7] F,M, Shahir and E, Babaei, "Dynamic Modeling of UPFC by Two Shunt Voltage-Source Converters and a Series Capacitor," in Proc, ICECT, 2012, pp, 548-553,
[8] E, V. Larsen, 1.1. Sanchez-Gasca, and 1.H. Chow, "Concept for design of F ACTS controllers to damp power swings," IEEE Trans, Power Syst" vol. 10, pp, 948-956, May 1995,
[9] H,F, Wang and F.J, Swift, "FACTS-based stabilizer designed by the phase compensation method, 1. Single-machine infinite-bus power systems, II, Multi-machine power systems," in Proc, APSCOM, 1997, pp, 638-649,