Embed Size (px)
Citation preview
![Page 1: [IEEE 2009 IEEE 5th International Conference on Wireless and Mobile Computing, Networking and Communications (WIMOB) - Marrakech, Morocco (2009.10.12-2009.10.14)] 2009 IEEE International](https://reader031.pdfslide.us/reader031/viewer/2022030120/5750a2401a28abcf0c99bb45/html5/thumbnails/1.jpg)
Suitability analysis of probabilistic proactive routingfor dynamic multi-hop ad hoc networks
Abdelfettah BelghithHANA Research Group
National School of Computer SciencesUniversity of Manouba, Tunisia
Adel Ben MnaouerCentre for Inf. and Comm. Technology
University of Trinidad and TobagoTrinidad and Tobago University
Mohamed Amine AbidHANA Research Group
National School of Computer SciencesUniversity of Manouba, Tunisia
Abstract—We first propose a new proactive routing frameworkbased on probabilistic decisions and a generic model to computethe existence probabilities of nodes and links. Then, we present adistributed algorithm to collect the cartography of the network.This cartography is used to instantiate the existence proba-bilities. Conducted simulations show that our proposal yieldssubstantially better routing validity. Nonetheless, it amounts tomuch longer routes. We proposed then a bounding technique toovercome this side effect and defined two probabilistic proactiverouting variants.
Conducted simulations show that our proposed bounded prob-abilistic proactive routing schemes outperform conventional rout-ing protocols and yield up to 66 percent increase in throughput.
I. INTRODUCTION
Conventional proactive routing protocols, due to their inher-ent nature based on shortest paths, select longer links whichare amenable to rapid breakages as nodes move around. In thispaper, we propose a novel probabilistic approach to handlerouting information in mobile ad hoc networks in a way toimprove the proactive routing pertinence as a function ofnetwork dynamics.
We restrict our attention to proactive routing where aperiodic exchange of topological messages provides each nodewith a certain image of the network at the beginning ofeach routing period. Once the routing table is updated, itwill be maintained and used during the entire current routingperiod. As a result and as the elapsed time since the startof the routing period gets farther, the topological informationcollected at the beginning of the routing period becomesinaccurate leading patently to invalid paths. In such mobilenetworks, there is certainly a need to consider paths composedof nodes and links having large remaining residual lives. Thequestion naturally arises as to how should we select anddecide on these links and routes. Finding the most stable pathmust anticipate or predict topological changes. We propose anovel probabilistic approach that would improve the routingpertinence of proactive routing protocols as a function ofthe network dynamics. Conducted simulations confirm thatour proposed probabilistic scheme improves the accuracy ofproactive routing and hence yields much more throughput.
The article is organized as follows. In section 2, we presentsome of the relevant research work done in the field. Insection 3, we define our probabilistic general framework
for selecting stable routes. Section 4 presents a Markovianmodel which provides a simple yet an effective mean for thecomputation of the probabilities of existence of network linksand nodes. In section 5, we present our network cartographycollecting algorithm that is required to instantiate the existenceprobabilities of network links and nodes. In section 6, weinvestigate, through extensive simulations, the suitability ofthe proposed probabilistic framework and its instantiation. Wefinally summarize our work in Section 7.
II. RELATED WORK
Conventional protocols use in general the hop-count metricto compute shortest paths towards destinations. However,shortest paths are not always reliable especially in case ofdynamic networks. Finding stable routes is rather the mainconcern for dynamic multi-hop ad hoc networks. Severalworks established already that choosing routes based on po-sitions, battery level, etc. of the nodes would make selectedpaths more resilient to topological changes. A new routingapproach has then come out considering the route stabilityor resiliency as a fundamental routing metric. Stability-basedrouting is a new emergent approach which allows routingto withstand the network dynamics. It aims essentially atchoosing routes which are more stable in time and hence moreresilient to dynamic changes in the network topology.
The stability of a path relies on the stability of its composinglinks. Authors in [1] proposed to classify links based on themobility behavior of their end point nodes. Links betweenstationary or very slowly moving nodes are considered asstationary links. Links which exist only for a short periodof time are handled as transient links. Newly formed linksare also considered to be transient as they are more likely tobreak down. Routing should use then stationary links wheneverthis is possible. A ticket-based probing procedure is proposedto find stable routes. Classification of links is previouslyadapted in [2] where authors used the strength of the receivedsignal from each neighboring node to determine whether theassociated link is either weak or strong. Routing is then madethrough paths maximizing the received signal strength.
Associativity Based Routing (ABR)[3] used a new metriccalled associativity which defines the stability of the linkbetween two given nodes. ABR considers that the longer the
2009 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications
978-0-7695-3841-9/09 $26.00 © 2009 IEEE
DOI 10.1109/WiMob.2009.84
459
![Page 2: [IEEE 2009 IEEE 5th International Conference on Wireless and Mobile Computing, Networking and Communications (WIMOB) - Marrakech, Morocco (2009.10.12-2009.10.14)] 2009 IEEE International](https://reader031.pdfslide.us/reader031/viewer/2022030120/5750a2401a28abcf0c99bb45/html5/thumbnails/2.jpg)
two nodes has being neighbors, the longer they would stayconnected. To express its associativity, each node broadcastsperiodically a Beacon to indicate its presence. Upon thereception of a Beacon, a counter associated to the generatingnode is updated. The counter is reset to zero if the associatednode is no longer accessible. The optimal route towards adestination is the one maximizing its cumulative associativitymetric. Further stability-based routing techniques can be foundin [4], [7], [8], [9], [11], [10].
Furthermore, few probabilistic techniques were proposedalthough they seem to better cope with the unpredictable be-havior of ad hoc topologies. In [12], a probabilistic techniqueis proposed to estimate the residual lifetime of routes. Routingis then made through the ones with maximum residual lifetime.Lifetime of a route is computed as a function of the existenceprobability of each link which is derived from the distributiongoverned by the underlying mobility model. In contract tothe later, our present work focuses rather on the existenceprobability of complete routes. Mobility is represented througha generic and simple behavioral analytical Markovian modelbased on the network cartography collected at the start of eachrouting period.
III. PROBABILISTIC FRAMEWORK FOR THE SELECTION OF
STABLE ROUTES
Throughout the paper and following the work presented inand, we consider that links are symmetric. We model a mobilemulti-hop ad hoc network by an undirected complete graphG=(V, E) where V is the set of vertices, and E represents theset of undirected edges. We stress here the fact that the graphis complete but this does not mean that all nodes are mutuallywithin transmission range of each other. Links in G=(V, E)will be partitioned into two disjoints groups as defined andexplained in next paragraph.
We define two states Up (U) and Down (D) for the links andnodes of G=(V, E). A vertex (i.e.; a node) in V is said to bein state U at time t if it is actively connected to the network;notice that a node can be connected but not active when, forinstance, it is forced to be in a dozing state by a power savingmechanism. A vertex is said to be in state D at time t if it is notactive independently of being connected or not. An edge in Eis said to be in state U when its end point vertices are withinpropagation range of each other independently of the states inwhich they are; otherwise the edge is said to be in state D. Anedge is said to be in state U means only that their end pointsare within propagation range independently of wether they areactive or not. We note here that E is indeed partitioned intotwo groups of edges: a group of U edges and a group of Dedges. The actual topology of the network at time t is thenprovided by the subgraph of G=(V, E) that contains only theU nodes and their corresponding U edges. This subgraph maysurely not contain some U edges exactly those not having bothof their end point vertices in the Up state.
A. Probability of link existence
In ad hoc networks, a link exists whenever its two end pointnodes exist (i.e; they are in the U state) yet they are withintransmission range (i.e; the link is in the U state). Let x and ybe the end vertices of edge e, the probability of existence ofe at time t is then given by:
P (e, t) = PU (x, t).PU (y, t).PU (e, t) (1)
Where PU (x, t) is the probability that node x is in state Uat time t, PU (y, t) is the probability that node y is in state Uat time t and PU (e, t) is the probability that nodes x and y arewithin transmission range at time t. We note here that we areassuming tacitly the independence between the different nodesand links. This is clearly not the case in real life networks,however, as we shall see it yields good results.
B. Probability of path existence
We define a path (s,d) as a sequence of n undirectedlinks from a source s to a destination d. A path exists ifall its nodes and its links are in state U. Let Sv = {n0 =s, n1, .., ni, .., nn = d} be the sequence of n+1 vertices andSe = {e1, e2, ..., ei, .., en} the sequence of n edges composingpath (s,d). The probability of existence of the path at time tis then given by :
P ((s, d)) =∏
ni∈Sv
PU (ni, t)∏
ei∈Se
PU (ei, t) (2)
Here again, we assumed a complete independence amonglinks, among nodes and between links and nodes.
Our objective is to find the optimal path between any twogiven nodes. The optimal path is the one having the greatestprobability of existence among all possible paths. Let Ts,d
be the set of all possible paths from source s to destinationd. We call Topt the most stable path (i.e having the greatestprobability), that is:
Topt : arg maxT∈Ts,d
P (T )
and consequently :
Topt : arg maxT∈Ts,d
ln P (T )
using now equation 2, we obtain :
Topt : arg maxT∈Ts,d
(ln(∏
ni∈T
PU (ni, t)∏
ei∈T
PU (ei, t))
which leads to :
Topt : arg minT∈Ts,d
(∑
ni∈T
− ln PU (ni, t) +∑ei∈T
− ln PU (ei, t))
(3)The solution to equation 3 may be readily provided by any
shortest path algorithm executed on the corresponding valuedgraph where every edge e has a weight − ln PU (e, t) and everyvertex has a weight − ln PU (n, t) .
460
![Page 3: [IEEE 2009 IEEE 5th International Conference on Wireless and Mobile Computing, Networking and Communications (WIMOB) - Marrakech, Morocco (2009.10.12-2009.10.14)] 2009 IEEE International](https://reader031.pdfslide.us/reader031/viewer/2022030120/5750a2401a28abcf0c99bb45/html5/thumbnails/3.jpg)
The above represents a generic framework to computeprobabilistic optimal paths. It remains to devise how theprobabilitie for a node or a link to be in the U or D state iscalculated. In the following section, we present a novel methodto compute these probabilities.
IV. MARKOVIAN MODEL FOR THE EXISTENCE NETWORK
ELEMENTS
According to the dynamics of the network, nodes and linksof our complete graph G=(V, E) switch between state Uand state D in a completely independent manner (by ourindependence hypothesis stated above). At any instant, theactual network is the one composed of the U vertices andthe corresponding U edges. To model this dynamic behavior,we propose to view each node and each link of the completegraph G=(V, E) as a Markovian two state automaton.
A. Probability of existence of vertices and edges
Let x be a vertex or an edge of G=(V, E). We model statechanges of x by a 2-states continuous time Markov chainwhere the residence time in state U, respectively in state D, isexponentially distributed with parameter λ, respectively withparameter μ. Let PU (x, t) denotes the transient probability ofelement x being in state U at time t. Let also PD(x, t) denotesthe transient probability of element x being in state D at timet. Our objective is to obtain the transient probability PU (x, t).The solution to this transient probability should then obey tothe following differential equations [13]:
PU (x, t) + PD(x, t) = 1dPU (x, t)
dt= μPD(x, t) − λPU (x, t) (4)
The solution of these equations is of the form:
PU (x, t) =μ
λ + μ+ B exp−(λ+μ)t (5)
Let us see the time axis divided into intervals representing therouting periods. At the beginning of a routing period, that is attime t = 0, we assume that the state of each and every elementof the complete graph is known. This indeed necessitates thecomplete knowledge of the network cartography. For now,we suppose that a certain oracle is there to give us thiscartography, we will develop on that later on. As a result,we readily have:
PU (x, at t=0) = 1 if x is U at t=0
= 0 if x is D at t=0 (6)
if we defineδ =
μ
λ + μ(7)
then, the final solution for PU (x, t) will be
PU (x, t) = δ + (1 − δ) exp−(λ+μ)t if x is U at t=0
= δ − δ exp−(λ+μ)t if x is D at t=0 (8)
The steady state probabilities of having element x in stateU denoted by PU (x) or in state D denoted by PD(x)) arereadily given by:
PU (x) = δ and PD(x) = 1 − δ (9)
In the rest of the paper, we shall focus solely on links’dynamics and assume that all nodes are kept permanentlyactive. We are then restricting the network dynamics to besolely driven by the mobility of the nodes. Our aim is then toinvestigate the impact of node mobility on proactive routingtables and at the same time demonstrate the efficiency of ourprobabilistic model.
B. Computing links parameters
Link stability depends on the actual distance separating itsend points and their relative mutual mobility. Let R denotesthe adopted transmission range. Let de denotes the distanceseparating two given nodes. These two nodes are capable ofcommunication only if de is less than or equal to R. However,the shorter is de the more stable is the corresponding link.Such a stability depends necessarily on their relative speeds.For a given predefined mobility, this amounts to consider λand μ of any link as functions of the distance separatingtheir corresponding end points. The question naturally arisesas to what functions of de should we use for λ and μ. Toanswer this question, we rely on the tacit observation that thetransient state of a Markov process decays rather very rapidlyto reach its steady state [13]. Consequently, we can discussour functions by considering and relying on the steady stateprobabilities given by equations 9.
Consider a link that is known to be in state U at thebeginning of the routing period. That is de for this link isno larger than R at the start of the routing period. Its transientprobability of being Up starts equal to one and then willdecay rapidly to δ its steady state probability. This steady stateprobability should tend to one as the distance de gets smaller;yet it should tend to one half as de approaches R.
Now let us consider a link in state D at the beginning ofthe routing period, that is its de is larger than R. Its transientprobability of being in state D starts equal to one (its transientprobability of being in state U starts equal zero) and then willdecay rapidly to (1− δ) its steady state probability. The latershould tend to one as de gets farther and should equal onehalf as de approaches R.
The previous discussion amounts to consider λ as an in-creasing function (respectively μ as a decreasing function) ofde
R . The rate at which λ increases (respectively μ decreases)as a function of de
R is of utmost concern since it reflects thedegree at which shorter hops are preferred in the selectionprocess. The larger such a rate of increase of λ (respectivelysuch a rate of decrease of μ) the more we select shorter hops.Extensive experiments and tests dictate the usefulness of thefollowing equations where we adopt the value k = 4.
λ = (de
R)k and μ = (
R
de)k (10)
461
![Page 4: [IEEE 2009 IEEE 5th International Conference on Wireless and Mobile Computing, Networking and Communications (WIMOB) - Marrakech, Morocco (2009.10.12-2009.10.14)] 2009 IEEE International](https://reader031.pdfslide.us/reader031/viewer/2022030120/5750a2401a28abcf0c99bb45/html5/thumbnails/4.jpg)
V. CARTOGRAPHY AUGMENTED DSDV
Now we turn to our earlier assumption about the oraclethat provides us, at the start of each routing period, with theactual real network cartography which gives us the differentdistances separating the different nodes. Our aim here is thento design a distributed algorithm that collects the cartographyof the network at the beginning of each routing period. Morespecifically, we here propose to augment the DSDV protocol.
First of all, we intend to get a correct and valid cartographyand therefore we will not tolerate delayed routing information.As such, we propose to distinguish between control (i.e.,Hello) messages and data packets. Hello messages are tobe transmitted as soon as possible before any other datapackets. As such, received or locally generated Hellos areput at the head of the IP sending queue in front of anyawaiting data packets. Secondly, we assume that each nodeis capable of known its own geographical location. Recentavailability of small and inexpensive low power GPS receiversand approaches for inducing relative coordinates based onsignal strength provides a justification for such an assumption[14]. For instance, the APS protocol [15] is a distributed hopby hop positioning algorithm that approximates the absolutepositions of all nodes given that only a small fraction ofnodes possess a self positioning capability. The APS algorithmworks as an extension to a distance vector proactive routingprotocol, and as such it can be assumed for this current work.Consequently, before forwarding a Hello or sending its locallygenerated Hello message, a node includes its own perceivedposition. Note in particular that a forwarded hello containsboth its originating node’s position and its forwarding node’sposition.
We propose a cartography capable augmented DSDV proto-col that works exactly as the original DSDV where each nodebroadcasts a Hello message periodically (i.e.; every Helloms-gperiod DSDV period) to announce itself and forwards usefulreceived Hellos. Recall that a useful received Hello is a Hellomessage that brings a new routing information and as suchupdates the local routing table. Recall also that an entry inthe routing table gets automatically flushed after a maximumduration period (Max duration period). The addition to theoriginal DSDV to built the network cartography is that weinclude in a new Hello the position of its originator node andwe also include the position of the forwarding node in eachforwarded Hello. It is then through the exact same numberHello messages of the original DSDV that a node can maintainits routing table up to date and built the network cartography.
A. Cartography validity definition
The correctness of the collected cartography is comparedagainst the real actual cartography of the network. Notethat the actual instantaneous cartography of the network canbe extracted from the simulator but it cannot be known inpractice. This is of no concern to us here since all what we aresearching for is to be confident that the collected cartographydoes represent adequately the real actual cartography at thebeginning of the routing period.
Consider a target node N. When N advertised itself (i.e.,sent its own generated Hello), it was at position (x0, y0).In the routing table of a node A that had already heardN’s Hello, a new entry for N was created, showing (x0, y0)as N’s coordinates. Since node N is mobile, its positionvaries as a function of time, and consequently it will be atposition (xt, yt) at time t during the same current routingperiod. We say that N’s position, as indicated by A’s currentcartography, is valid as long as the distance between therecorded position (x0, y0) and the actual current position(xt, yt) is less than a tolerated predefined value denoted by
d. That is:√
(xt − x0)2 + (yt − y0)
2 ≤ d. The validity ofthe cartography, as perceived by any given node, say nodeA, represents the percentage of nodes having valid positionsamong all nodes. d is a tuning parameter whose value isrelative to the transmission range used, and is in general asmall fraction of this range.
B. Simulation set up
To ascertain the validity of the cartography as a function ofthe mobility, the traffic load and the elapsed time since the startof the current routing period, we conducted an extensive set ofsimulations. We have considered a simulation area of 400m by400m , with 120 mobile nodes using the Random Way Pointmobility model [11]. We used a transmission range of 100 m,a tolerance d of 10 meters that is a tolerance equals to onetenth of the used transmission range, a network capacity of 11Mbps and a maximum MAC retransmission count equals to 7.We used a priority IP module at the network layer to enforcethat Hellos are treated before any awaiting data packet. Thepriority queue maximum size is 100 packets. Furthermore, thisqueue is handled such as an arriving new IP data packet isonly accepted if less than 70 packets (data and Hellos) arepresent in the queue otherwise it is rejected at the IP level.Hello messages are only rejected (dropped) if the queue iscompletely full. This enforces a further layer for the priorityhandling of the Hello messages as they are the responsible forthe cartography dissemination. Finally, the routing updatingperiod is set to 10 seconds and the Max duration period,representing the life time of an entry in the routing table, isset to 15 seconds. All required modifications are ported on theOMNET+ network simulator.
C. Observations
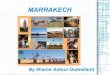
Fig. 1 portrays the validity of the cartography as a functionof the elapsed time since the start of the routing period and fordifferent node speeds. Recall that we are using a priority IPhandling and therefore the network load has a very little impacton the validity of the cartography. For a null node speed (nomobility), we get a constant validity of one hundred percent.For speeds higher or equal to 1 m/sec, the validity of thecartography gets at its maximum around instant 1.5 sec whichis the time required to get the maximum of Hellos throughoutthe network. Consequently, if we launch the routing updatingprocess around 1.5 seconds before the start of the period, weget the maximum cartography validity just at the start of the
462
![Page 5: [IEEE 2009 IEEE 5th International Conference on Wireless and Mobile Computing, Networking and Communications (WIMOB) - Marrakech, Morocco (2009.10.12-2009.10.14)] 2009 IEEE International](https://reader031.pdfslide.us/reader031/viewer/2022030120/5750a2401a28abcf0c99bb45/html5/thumbnails/5.jpg)
0 1 2 3 4 5 6 7 8 90
10
20
30
40
50
60
70
80
90
100
Elapsed Time (sec)
Validity of the Cartography
(Tolerance 10m)
Speed 0 m/sSpeed 1 m/sSpeed 2 m/sSpeed 5 m/sSpeed 10 m/s
Fig. 1. Cartography validity as a function of the elapsed time
routing period. Moreover, as we see on Fig. 1, the validity isone hundred percent for all considered speeds but 10m/sec.For the later, the validity is, however, sufficiently high andequals nearly ninety seven percent.
1
VI. SUITABILITY OF THE PROPOSED PROBABILISTIC
MODEL
To experiment our new probabilistic proposal, we conducteda set of simulations using the OMNET+ simulator where weintegrated the proposed probabilistic framework, the cartog-raphy collecting algorithm and the Priority IP handling. Oursimulation set up is as defined previously; that is a simulationarea of 400mx400m, 120 mobile nodes, a transmission rangeof 100 meters, a tolerance of 10 meters and the Random WayPoint mobility model [11]. The time axis is seen divided intoconsecutive routing periods each of length T seconds. Forthe conventional proactive routing; namely the DSDV, eachnode generates a Hello message just at the start of the routingperiod. However, for the probabilistic routing protocol and itsderivatives which will be introduced next, each node generatesa Hello message one second and a half before the end of thecurrent period. As such, the cartography with the maximumvalidity is readily available just at the start of the next routingperiod. The initial topology of 120 nodes is chosen randomly,and the period size is fixed to 10 seconds.
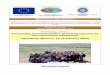
Before we can proceed further, we require here to recall thatthe probabilistic routing thrives to select shorter hops as theelapsed time from the start of the routing period gets farther.As a result, probabilistic routes are much more resilient tobreakages due to the mobility of nodes, but they are muchlonger than the routes used by the common proactive routing.The upper curve in Fig. 2 represents the average route length innumber of hops provided by the probabilistic routing, for a nullspeed and a null traffic load, as a function of the elapsed timesince the start of the routing period. At the start of the routingperiod that is at instant 0, the network collected cartographyprovides the distances between the nodes and consequentlywe readily get the initial probabilities for all links as givenby equation 6. At time instant 1 second, we reach the steadystate and the link probabilities are now rather governed byequation 9. As such, the probabilistic route average length
starts around 2.5 which is the same average route length asgiven by the conventional proactive routing and also by the realactual topology since the cartography validity is one hundredpercent. From instant one second, the probabilistic averageroute length stabilizes at around 11 hops which is a rathervery large value.
0 1 2 3 4 5 6 7 8 90
2
4
6
8
10
12
14
16
18
20
Elapsed Time (sec)
Mean Length
Probabilistic Non Limited Protocol Probabilistic Limited Protocol (α = 1/3)Probabilistic Limited Protocol (α = 2/3)Proactive ProtocolReality
Fig. 2. Average route length as a function of the elapsed time, V=0 m/sec
This very large average route length hinders any practicaluse of probabilistic routing unless some definite action isundertaken to impose on it an upper limit. To mitigate thedown side of probabilistic routing, we propose to integrate abounding function. let α be a fraction of the transmission rangeR, and df be the flying distance between a source node S anda destination node D. Let L(S,D) be the bounding number ofhops that can be used to reach node D from node S which isobviously at least the number of hops provided by the shortestpath denoted Ls(S,D). We readily obtain:
L(S,D) = max(df/αR, Ls(S,D)) (11)
Note here that when α goes to zero then no bounding isused and when α goes to one then only sortest paths can beused. Consequently, α is an adequate tuning parameter thatcan be used in conjunction with the probabilistic routing tolimit the length of its provided routes.
The question naturally arises as to how to calculate now theshortest routes within our probabilistic framework. Earlier, wehave just to execute a shortest path algorithm on the valuedgraph provided by the network cartography seen at the start ofthe routing period. But now, we have to further restrict theseroutes according to the bounding function just defined. Wesolved this by using the Extended Bellman-Ford Algorithm(EBFA) for shortest paths computed with 2 metrics [16]. Aprobabilistic route must now have the greatest probability ofexistence among all possible routes, yet its length should notexceed (in terms of number of hops) the maximum thresholdgiven by equation 11. In the remaining, we shall consider thevalue α = 1/3 to approach the pure probabilistic routing andthe value α = 2/3 to approach rather the common proactiverouting.
The routing period is divided into T equally spaced ob-servations points; namely an observation point each second.At each observation time point we have then five different
463
![Page 6: [IEEE 2009 IEEE 5th International Conference on Wireless and Mobile Computing, Networking and Communications (WIMOB) - Marrakech, Morocco (2009.10.12-2009.10.14)] 2009 IEEE International](https://reader031.pdfslide.us/reader031/viewer/2022030120/5750a2401a28abcf0c99bb45/html5/thumbnails/6.jpg)
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
4
ρ (Packets/sec)
Received Packets
Proactive ProtocolProbabilistic Limited Protocol (α=1/3)Probabilistic Limited Protocol (α=2/3)
Fig. 3. Throughput as a function of the traffic load, V=5 m/sec
views of the network: the actual real view provided by theunderlying mobility model used in our OMNET+ simulator,the DSDV routing table computed in the common conventionalproactive way, the probabilistic non limited routes computedby our pure probabilistic proposed model, the probabilisticlimited α = 1/3 and the probabilistic limited α = 2/3. Aroute from a source node to a destination node is termed validif it exists in the real network regardless whether it is optimal(a shortest route) or not.
Let us now investigate the betterment brought by this prob-abilistic framework in terms of the network throughput. Weconsider the same network scenario used previously, howeverwe also consider 8 traffic flows emanating from 8 differentsources chosen randomly and destined to 8 other destinationnodes also chosen randomly. We fix the nodes’ speed to 5m/sec. The data packet size used is 200 bytes. Fig. 3 portraysthe average number of received packets per flow as a functionof the traffic load per flow. We observe that the probabilisticlimited α = 1/3 outperforms both the conventional proactiveand the probabilistic limited α = 2/3 in delivering morethroughput. The probabilistic limited α = 1/3 stands out evenfor light traffic loads, for moderate traffic, for instance 15packets per second, it delivers around 67 percent more than theconventional proactive routing. For a higher traffic load, forexample at 40 packet per second, it delivers 50 percent morethan the conventional proactive protocol. The probabilisticlimited α = 2/3 outperforms also the conventional proactiveprotocol, however it delivers much less than its α = 1/3counter part.
VII. CONCLUSION
In this article, we proposed a new probabilistic proactiverouting framework that selects the most stable links to con-struct routes towards their destinations. A network elementbeing a node or a link is represented as a two state simpleMarkovian automaton. Furthermore, a network cartographycollecting algorithm is proposed to provide distances betweennodes at the start of each routing period. The cartography isthen used to instantiate the required probabilities of existenceof each element in the network.
Extensive simulations are conducted to demonstrate the ef-ficiency of both the proposed probabilistic framework and the
cartography collecting algorithm. Our probabilistic propositionbases its decision rather on link stability and consequentlyselects shorter and more resilient links. However, such aninherent behavior has a side effect of increasing the averageroute length. To mitigate this down side, we adopted a simplehop bounding approach that limits the number of hops withinprobabilistic routes. Conducted simulations showed that thisis an effective technique yielding substantially much morevalid routes and amounting to a substantial increase in networkthroughput.
REFERENCES
[1] W.-H. Chung , Probabilistic analysis of routes on mobile ad hoc networks.IEEE Communications Letters, 8(8):506–508, 2004.
[2] R. Dube, C. D. Rais, K. Y. Wang, S. K. Tripathi, Signal Stability-BasedAdaptive Routing (SSA) for Ad Hoc Mobile Networks. IEEE PersonalCommunications Magazine, vol. 4, no. 1. pp.36-45, 1997
[3] C-K. Toh, Associativity-Based Routing for Ad Hoc Mobile Networks.International Journal on Wireless Personal Communications, Vol. 4 No.2, pp. 103-139, 1997.
[4] R. Beraldi, L. Querzoni, R. Baldoni, A hint-based probabilistic protocolfor unicast communications in MANETs. Ad Hoc Networks 4. pp 547-566. Elsevier, 2006/
[5] A. Belghith, H. Idoudi, M. Molnar, Proactive probabilistic routing inmobile ad hoc networks. Proceedings of the International Conferenceon Wireless Networks (AICWN’08), Las Vegas, USA, July 2008.
[6] R. Marie, M. Molnar,H. Idoudi, A simple automata based model forstable routing in dynamic ad hoc networks. Proceedings of thesecond ACMInternational Workshop on Performance monitoring, mea-surements and evaluation of heterogeneous wireless and wired networks(PM2HW2N’07), Crete Island, Greece, October 2007.
[7] H. Dubois-Ferriere, M. Grossglauser, M. Vetterli, Age matters: efficientroute discovery in mobile ad hoc networks using encounter ages. Proc.of ACM MobiHoc03, 1-3 Annapolis, MD, USA, 2003.
[8] M. Roth, S.Wicker, Termite: emergent ad-hoc networking. Proceedingsof The Second Mediterranean Workshop on Ad-Hoc Networks, Mehdia,Tunisia, 2003.
[9] D. Yu, H. Li, I. Gruber , Path availability in ad hoc network. Proceedingsof the 10th International Conference on Telecommunications (ICT03),volume 1, pages 383–387, 2003.
[10] Hui Zhang and Yu-Ning Dong, A Novel Path Stability ComputationModel for Wireless Ad Hoc Networks. IEEE SIGNAL PROCESSINGLETTERS, VOL. 14, NO. 12, 2007.
[11] T. Camp, J. Boleng, and V. Davies, A Survey of Mobility Models for AdHoc Network Research. Wireless Communication and Mobile Computing(WCMC): Special issue on Mobile Ad Hoc Networking: Research, Trendsand Applications, vol. 2, no. 5, pp. 483-502, 2002.
[12] Y. Tseng, Y. F. Li, and Y. Chang(, On Route life time in multihop mobilead hoc networks. IEEE TOC, Vol. 2 N. 4., 2003
[13] L. Kleinrock, Queueing Systems, Volume 1: Theory. Wiley Interscience,1975.
[14] S. Giordano and I. Stojmenovic, Position-based ad hoc routes in ad hocnetworks. CRC Press, Inc. Boca Raton, FL, USA , 2003, pp. 287-300.
[15] D. Niculescu and B. Nath, DV Based Positioning in Ad Hoc Networks.Telecommunication Systems,Springer Netherlands, Vol. 22, No. 1-4,janvier 2003, pp. 267-280.
[16] X. Yuan, On the Extended Bellman-Ford Algorithm to Solve Two-Constrained Quality of Service Routing Problems. Proceedings ofThe Eighth International Conference on Computer Communications andNetworks(IC3N’99). Boston, USA, 1999.
464