Embed Size (px)
Citation preview
![Page 1: [IEEE 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar (APSAR) - Xian, Shanxi, China (2009.10.26-2009.10.30)] 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar](https://reader042.pdfslide.us/reader042/viewer/2022020613/575092af1a28abbf6ba97330/html5/page/1.jpg)
Micro-Doppler analysis of vibrating target in Bistatic Radar
Ren-fei Zhu1, Qun Zhang1,2, Xiao-peng Zhu1, Ying Luo1
1. Inst. of Telecommunication Engineering, AFEU, Shanxi, Xi’an, 710077 2. Key Laboratory of Wave Scattering and Remote Sensing Information,
Ministry of Education, Fudan University, Shanghai 200433, China
Abstract
Bistatic radar is gaining more and more interest by the radar community over the last years, and Micro-Doppler information is regarded to be the unique features of radar’s targets. In this paper, a geometric of bistatic radar and vibrating target is constructed. Then in bistatic radar system, the Micro-Doppler information reduced by vibrating structure of target is analysis via Gabor-Transform. Then we get that vibrating parts and the relationship between target and radar will modulate the micro-Doppler frequency. Lastly the simulation results validate the conclusions.
Keywords: Bistatic radar, vibration; micro-Doppler; Time-Frequency analysis.
1. Introduction
Over the past years, electronic support measures (ESM) and homing anti-radiation missiles (ARM) pose a threat to the monostatic radar [1, 2]. New advances in frequency synthesis, digital communications, and high-speed computing allow one to take advantage of the unique geometric properties of bistatic systems [2]. Bistatic radar has some obvious advantages, for example: survivability due to separated location and the receiver is passive, the ability of seeing stealthy targets, more additional information than monostatic radar and the system is also potentially simple and cheap [2~4]. So bistatic radar system is gaining more and more interest by the radar community [1~5].
Micro-motions of the target or structure on the target may induce additional frequency modulation on radar’s echo, which generate side bands about the Doppler frequency, called micro-Doppler effect [6, 7]. V. C. Chen and other scholars have done lots of works on micro-Doppler effect [7~10], but they only analyze the effect in monostatic radar system. Compared with the monostatic radar, Micro-Doppler effect in bistatic radar has many differences due to its spatial complexity. So in section 2, we derived mathematical formulas for micro-Doppler signature of targets with vibrating structure in bistatic radar system, and some conclusions of micro-Doppler effect in bistatic radar system is obtained. In section 3, we present computer simulations in different bistatic geometries. Summary and conclusions are given in the last section.
2. System Model and mathematical analysis
As we known, Doppler frequency shift reflects the velocity of the moving target. Micro-Doppler frequency has
no relation to translation of target, and it is only reduced by target’s micro-motion [11]. In this paper, we assume the translation moving of target is compensated accurately, so after signal pre-processing, only the vibrating points on the target are dynamic and other points are stationary.
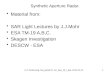
Fig1. Geometry of bistatic radar and a target with vibrating structure
As shown in figure 1, the transmitter radar A is located at the origin O of the radar co-ordinate system (X, Y, Z). The receiver radar B is on (L, 0, 0), so the baseline length is L. the reflector P is a vibrating point, and Q is the vibrating centre. For the purpose of analysis simply, a local co-ordinate system (x, y, z) is established. The point Q is the origin of the local co-ordinate system and it is parallel with radar co-ordinate system. Assume the azimuth and elevation angle of the target centre in the radar co-ordinates (X, Y, Z) are Aα and Aβ , and the means of Bα and Bβ are illustrated in Fig1. AOR and BOR are the distances between the two radars(transmitter and receiver) and the target central point O respectively, so the target central point O is located at ( cos cosAO A AR β α ,
cos sinAO A AR β α , sinAO AR β ) in the radar co-ordinate. The reflector P is a vibrating point on the target and the
azimuth and elevation angles of point P relative to the centreQ are Pα and Pβ . So the vibrating point will be at ( cos cos , cos sin , sint P P t P P t PD D Dβ α β α β ) in the local co-ordinate, where tD is a time-variability and it represents a distance between the vibrating point and the target centre Q.Assume that ( )APR t and ( )BPR t denote the ranges from the two radars(transmitter and receiver) to the vibrating point Prespectively, so they can be expressed as
2( ) [( cos cos cos cos )AP AO A A t P PR t R Dβ α β α= +2( cos sin cos sin )AO A A t P PR Dβ α β α+ +
122( sin sin ) ]AO A t PR Dβ β+ + (1)
2( ) [( cos cos cos cos )BP BO B B t P PR t R Dβ α β α= −_____________________________ 978-1-4244-2732-1/09/$25.00 ©2009 IEEE
![Page 2: [IEEE 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar (APSAR) - Xian, Shanxi, China (2009.10.26-2009.10.30)] 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar](https://reader042.pdfslide.us/reader042/viewer/2022020613/575092af1a28abbf6ba97330/html5/page/2.jpg)
2( cos sin cos sin )BO B B t P PR Dβ α β α+ +
122( sin sin ) ]AO B t PR Dβ β+ + (2)
For the purpose of simplified analysis, we assume that the vibrating point and the radars are in a same plane at any time, so the azimuth angle ( Aβ and Pβ ) of the target’s centre and vibrating point is equal. In the case, our analysis is only centralized in that plane, so we can rebuild a two-dimensionality co-ordinate and get new geometric of bistatic radar system as Fig 2.
That is said Aβ and Pβ are equal to zero, and we can obtain cos cos 1A Bβ β= = and sin sin 0A Bβ β= = . So the Eq. (1) and Eq. (2) can rewritten as 2( ) [( cos cos )AP AO A t PR t R Dα α= +
12 2( sin sin ) ]AO A t PR Dα α+ + (3) 2( ) [( cos cos )BP BO B t PR t R Dα α= −
12 2( sin sin ) ]BO B t PR Dα α+ + (4)
Figure2. Two geometric of the bistatic system
In the bistatic radar system, the echo signal is a function about the sum of range ( )APR t and ( )BPR t . Assume that the amplitude, vibration rate and initial phase of the vibration are VD , VW and 0ψ respectively. So at the time t, the tD can be expressed as
0sin(2 )t V VD D W tπ ψ= + (5) Then the Taylor series expansion of the sum range term can be presented as
0( ) sin(2 )AB AO BO V VR t R R D W tπ ψ≅ + + +[cos( ) cos( )]A P B Pα α α α× − − + (6)
If radar A transmits a sinusoidal waveform, then cf is its carrier frequency and cλ represents the wavelength of the radar signal. So the baseband of the echo from the vibrating point can presents as
( )( ) exp( 2 ) exp{ ( )]}AB
ABc
R tS t j tσ π σ φλ
= − = (7)
where ( )( ) 2 AB
ABc
R ttφ πλ
= − is the phase term of the baseband
signal. By taking the time derivative of the phase, so the micro-Doppler frequency reduced by the vibrating point can obtained.
02 cos(2 )micro doppler V V V
c
f W D W tπ π ψλ− = − +
[cos( ) cos( )]A P B Pα α α α⋅ − − + (8)
If denote bistatic angle, in the Fig 2 it can be expressed as A Bβ π α α= − − (9)
By substituting (9) in (8), the micro-Doppler micro dopplerf − can be re-written as
2micro doppler V V
c
f W Dπλ− = −
0cos(2 )cos( )cos( )2 2V A PW t β βπ ψ α α⋅ + + + (10)
From Eq. (10) we can obtain: (1) Micro-motion of target or structure on the target may induce micro-Doppler effect by modulating on the returned signal in bistatic radar system; (2) the micro-Doppler frequency is a periodic function of time and its change periodic is equal to the periodic of vibrating point; (3) The maximum of the micro-Doppler frequency
change is 2 cos( )cos( )2 2V V A P
c
W Dπ β β α αλ
+ + , and the
geometric relationship between bistatic radar and target modules the maximum, a multiplier of the maximum
( cos( )cos( )2 2 A PFa β β α α= + + ) is given from the Eq. (10);
(4) The amplitude of the vibration is
0
max( )
2 cos(2 )cos( ) cos( )2 2
c micro dopplerV
V V A P
fD
W W t
λβ βπ π ψ α α
−=+ + +
. (11)
From Eq. (11), it can be found that the maximum of the micro-Doppler frequency is modulated by the geometric relationship between bistatic radar and target. To extract the micro-motion information correctly, the multiplier should be calculated precisely.
3 Computer simulations
For micro-Doppler signature is time-varying, so high-resolution time-frequency transform analysis is necessary for extracting the features [6, 8]. In this Section, we take the Gabor-transform to analyze micro-Doppler effect in different geometric bistatic radar system.
Assume the carrier frequency and the pulse repetition frequency of the radar system are 5GHzcf = and
2000HzPRF = , respectively.
-5 0 5-5
0
5
cross-range, m
rang
e, m
Target cneter
Vibrating point
Target center
Figure 3. Scattering point model of the target
![Page 3: [IEEE 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar (APSAR) - Xian, Shanxi, China (2009.10.26-2009.10.30)] 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar](https://reader042.pdfslide.us/reader042/viewer/2022020613/575092af1a28abbf6ba97330/html5/page/3.jpg)
Figure 4. Geometric of bistatic radar systems
Mic
ro-D
oppl
er fr
eque
ncy,
Hz
Slow -Time, s0 0.2 0.4 0.6 0.8 1
-1000
-500
0
500
1000
(a) Monostatic radar system, L=0Km
Slow -Time, s
Mic
ro-D
oppl
er fr
eque
ncy,
Hz
0 0.2 0.4 0.6 0.8 1-1000
-500
0
500
1000
(b) Bistatic radar system, L=4Km
Slow -Time, s
Mic
ro-D
oppl
er fr
eque
ncy,
Hz
0 0.2 0.4 0.6 0.8 1-1000
-500
0
500
1000
(c) Bistatic radar system, L=8Km
Slow -Time, s
Mic
ro-D
oppl
er fr
eque
ncy,
Hz
0 0.2 0.4 0.6 0.8 1-1000
-500
0
500
1000
(d) Bistatic radar system, L=12Km
Figure 5. Gabor-Transform of micro-Doppler signature
The scattering point model of the target is shown in Fig. 3. The azimuth angle of the vibration is 30Pα = o , the amplitude and frequency of the vibration is
4mVD = and 2HzVW = , respectively. Fig. 4 shows four different geometric bistatic radar
systems, and Table I gives parameter setting of the radar systems.
Fig. 5(a-d) shows the Gabor-Transform results of micro-Doppler signature in time-frequency domain. From Fig.5 shows micro-Doppler frequency is a sinusoid function both in monostatic and bistatic radar system. The multiplier Fa of the maximum is equal (1, 0.643, 0.349, 0.155) in the four geometric system, and the theoretical value of the maximum of micro-Doppler frequency is (1677, 1077, 585, 259) Hz, respectively. By extracting the maximum in the time-frequency domain we can obtain real value of the maximum frequency (1678.2, 1075, 587.2, 262.4) Hz, the results confirm our analysis. By substituting the maximum frequency into (11), the amplitude of the vibration is obtained (4.0, 3.99, 4.01, 4.05) m.
4 Summary and conclusions
Analysis and extraction of the micro-Doppler has been in the radar field. Information of micro-motion can provide additional information for radar target identification, therefore analysis of micro-Doppler in bistatic radar is very important for military. In the time-frequency domain, micro-Doppler effect induced by vibrating point in the bistatic radar system is a sinusoid function, and the maximum of the micro-Doppler frequency is modulated by the geometric relationship between bistatic radar and target. Accurate estimation of spatial relationship between the bistatic radar and the target is necessarily to extract the micro-motion information correctly.
References
[1] Richard Norland. Digital Signal Processing in Binary Phase Coded CW Multistatic Radar [A]. Radar 2003, Proc. of the International Conference on Radar Systems, 2003:299-302.
[2] Measure N.C, Alexander N.T, Taley M.T. Unique Calibration Issues for Bistatic Radar Reflectivity Measurements [A]. Radar 1996, Proc. of the IEEE national Conference on Radar Systems, 1996:142-147.
[3] H. D. Griffiths. From a different perspective-principles,
![Page 4: [IEEE 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar (APSAR) - Xian, Shanxi, China (2009.10.26-2009.10.30)] 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar](https://reader042.pdfslide.us/reader042/viewer/2022020613/575092af1a28abbf6ba97330/html5/page/4.jpg)
practice and potential of bistatic radar [A]. Radar 2003, Proc. of the International Conference on Radar Systems, 2003:1-7.
[4] Chad A. McAllister. Signal Processing considerations for an application of Bistatic radar [A]. IEEE Region 5 conference, 1998, Spanning the Peaks of Electro-technology, 1998(3):45-49.
[5] Tsao M Slamani T, Varshney P, Weiner D et al. Ambiguity function for bistatic radar. IEEE Trans.on Aerospace and Electronic Systems, 1997, 133(6):1041-1051.
[6] V. C. Chen. Analysis of radar micro-Doppler signature with time-frequency transform [A]. Proc. Statistical Signal and Array Processing, 2000, 463-466.
[7] T. Thayaparan, S. Abrol, E. Riseborough. Micro-Doppler feature extraction of experimental helicopter data using wavelet and time-frequency analysis [A]. Radar 2004, Proc. of the International Conference on Radar Systems, 2004.
[8] V. C. Chen, F. Y. Li, S.-S. Ho, et al. Micro-Doppler effect in radar: Phenomenon, model and simulation study [J]. IEEE Trans. on AES, 2006, 42(1): 2-21.
[9] Xueru Bai, Mengdao Xing, Feng Zhou, Guangyue Lu, and Zheng Bao, “Imaging of Micromotion Targets With Rotating Parts Based on Empirical-Mode Decomposition”, IEEE Trans. GRS, 2008, 46(11): 3514-2523.
[10] Qun Zhang, Tat Soon Yeo, Hwee Siang Tan, Ying Luo, Imaging of a Moving Target with Rotating Parts Based on the Hough Transform [J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(1): 291-299.
[11] ZHUANG Zhao-wen, LIU Yong-xing, LI Xiang. The Achievements of Target Characteristic with Micro-Motion[J]. Acta Electronica Sinica, 2007(3):520-525.
Table I. Parameter setting for bistatic radar systems
Baselinelength(L)
The distanceof BOR
Bistaticangle
Multiplier( Fa ) Max frequency
0Km 10 Km 0 1 1677 Hz4Km 10.77Km 21.8 0.643 1077Hz 8Km 12.8Km 38.7 0.349 585Hz
Geometric of bistatic radar
system 12Km 15.6Km 50.2 0.155 259Hz