Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 Second International Conference on Sensor Technologies and Applications (sensorcomm 2008) - Cap Esterel, France (2008.08.25-2008.08.31)] 2008 Second International Conference](https://reader037.pdfslide.us/reader037/viewer/2022092905/5750a8491a28abcf0cc773fe/html5/thumbnails/1.jpg)
Transmission Capacity of Underwater Sensor Networks: A Case for Fixed Distance
Mohammad Sheikh Zefreh1, Ali Mohammad Fouladgar1, Farzad Eskandari2, Pejman Khadivi1
1Department of Electrical and Computer Engineering, Isfahan University of Technology, Isfahan, IRAN 2Babol University of Technology, Babol, IRAN
{sheikhzefreh,amfooladgar, pkhadivi}@ec.iut.ac.ir , [email protected]
Abstract In this paper, upper and lower bound on the transmission capacity of underwater sensor networks are derived. Transmission capacity is defined as the maximum permissible density of simultaneous transmissions that allows a certain probability of successful reception. In order to drive these bounds it is assumed for the network model that the distance between source and destination is a fixed value. The ratio of signal to interference (SIR) for underwater acoustic channels is used as a figure of merit for the system performance. This ratio is determined and employed as a criterion for successful reception. Simulation results support the analysis.
Keywords-Underwater sensor networks; Transmission capacity; Acoustic propagation.
1. Introduction Underwater sensor networks are deemed to have applications for ocean sampling, oceanographic data collection, environmental and pollution monitoring, offshore exploration, disaster prevention, tsunami and seaquake warning, assisted navigation, distributed tactical surveillance, and mine reconnaissance. Underwater communication links are based on acoustic wireless technology, which poses unique challenges due to the harsh underwater environment, such as limited bandwidth capacity, high and variable propagation delays, high bit error rates, and temporary losses of connectivity caused by multipath and fading phenomena [1]. In addition, the path loss in underwater acoustic communication channels depends not only on the distance between the transmitter and receiver, as it is the case in many other wireless channels, but also on the signal frequency [2]. Within such an environment, designing an underwater acoustic (UWA) network that maximizes throughput and reliability while minimizing the power consumption becomes a very difficult task.
One of the questions that arise naturally at this time is that if two transmitters that their relevant receivers are in the vicinity of each other, send their data in the same time, the Signal to Interference ratio (SIR) decreases at the receivers; Hence, what are the fundamental capabilities of underwater networks in supporting multiple nodes that wish to communicate to (or through) each other over an acoustic channel in order to satisfy the QoS requirements? While research has been extremely active on assessing the capacity
of wireless radio networks, no similar analysis has been reported for underwater acoustic networks [2].
In this paper, upper and lower bound on the maximum permissible density of simultaneous transmissions in underwa- ter sensor networks are derived. In order to drive these bounds it is assumed that the distance between source and destination is a fixed value, and we postpone the problem for the case that the power control is available in the network architecture[3,4].
The rest of the paper is organized as follows: In Section 2, we discuss related works on capacity issues over wireless multi-hop networks. Underwater Acoustic Propagation model is described in Section 3. Transmission capacity of underwater sensor networks for a special case that the distance between source and its one-hop destination is a fixed value is determined in Section 4. Section 5 is dedicated to conclusions. 2. Related Works The capacity of wireless multi-hop networks is an interesting research area and current issue of many researchers. Gupta and Kumar [5] studied the capacity of ad hoc wireless networks, which is defined in the usual manner as the maximum data rate that is achievable by all source–destination pairs of nodes in the limit as the number of nodes grows to an arbitrarily large level. Under this model, stationary nodes are randomly and uniformly located (over a disk area), and each node sends data to a randomly and uniformly selected destination. Their main result indicates that as the number of nodes per unit area
)(λ increases, the throughput capacity decreases approximate -ly as λ/1 . Grossglauser and Tse [6] exploit nodal mobility to determine its effect on the network capacity. Allowing for unbounded delay and using only one-hop relaying, they show that mobility increases the capacity asymptotically. In [7], Weber et al. used a model, includes a stochastic SINR constraint along with random channel access in order to accurately model the behavior of a distributed ad hoc network. That is, under a random distribution of transmitters, the probability of the SINR ratio being inadequate for successful reception must be below some constant ε , which called the outage constraint. The results summarize the dependence of ad hoc network capacity on path loss, transmission power, target signal-to-noise ratio (SNR), spreading gain, outage probability, and other system parameters. M. Stojanovic discusses about the relationship between capacity and distance in underwater environments and the bandwidth dependency on
The Second International Conference on Sensor Technologies and Applications
978-0-7695-3330-8/08 $25.00 © 2008 IEEE
DOI 10.1109/SENSORCOMM.2008.138
706
The Second International Conference on Sensor Technologies and Applications
978-0-7695-3330-8/08 $25.00 © 2008 IEEE
DOI 10.1109/SENSORCOMM.2008.138
699
![Page 2: [IEEE 2008 Second International Conference on Sensor Technologies and Applications (sensorcomm 2008) - Cap Esterel, France (2008.08.25-2008.08.31)] 2008 Second International Conference](https://reader037.pdfslide.us/reader037/viewer/2022092905/5750a8491a28abcf0cc773fe/html5/thumbnails/2.jpg)
the distance is assessed using an analytical method that takes into account physical models of acoustic propagation loss and ambient noise [2].
In this paper we determine maximum permissible density of simultaneous transmissions of underwater sensor networks exploiting the work by Weber et al [7].
3. Underwater Acoustic Propagation Attenuation that occurs in an underwater acoustic channel over a distance r for a signal of frequency f is given by:
rk farfrA )(),( =
where, k is the spreading factor, and a(f ) is the absorption coefficient [2]. The spreading factor k describes the geometry of propagation, and its commonly used values are k = 2 for spherical spreading, k = 1 for cylindrical spreading, and k = 1.5 for the so-called practical spreading. The absorption coefficient can be expressed empirically, using the Thorp’s formula which gives a(f ) in dB/km for f in kHz as [2]:
003.01075.24100
441
11.0)(log10 242
2
2+×+
++
+= − f
ff
fffa
4. Transmission Capacity of Underwater Sensor
Networks Transmission capacity is defined as the maximum permissible density of simultaneous transmissions that satisfies a given constraint on the probability of successful reception [7]. Our goal in this paper is that to determine this capacity for a special case that each transmitter uses a fixed transmitted power same to other transmitters. In other word, the distance between each sender and its corresponding receiver is r, which is a fixed value. Formally, let }X{ i=Π denotes a homogeneous Poisson point process on a plane, where the points Xi denote the locations of transmitting nodes [12]. We define the transmission capacity, λ , as the maximum density of points in Π such that the probability a typical receiver is unable to decode its reception is less than an outage requirement ε , 10 <<< ε .
In order to determine the capacity, it is assumed that transmitters employ a fixed transmission power ρ for receivers that are a fixed distance away. Network capacity is not independent of the modulation technique used in the physical layer. In a network that FH-CDMA is used, bandwidth W is divided into M sub-channels,
where MW is required bandwidth per channel. A receiver
attempting to decode a signal from a transmitter on sub-channel }...,,1{ Mm ∈ only sees interference from other simultaneous transmissions on that sub-channel. By contrast on a DS-CDMA network, a receiver sees interference from all transmitters, and spreading factor M is used to reduce the minimum SINR required for successful reception. If the nominal SINR requirement for FH-CDMA is β , then DS
CDMA has a reduced SINR requirement of Mβ
, assuming that the interference is treated as wideband noise.
In underwater communication, a practical system is normally designed such that the noise is negligible with respect to interference, i.e. SIRSNR >> , or equivalently,
SIRSINR ≈ . Hence, SIR is used as a figure of merit for the system performance [8]. Thus, the appropriate requirement on λ under the outage probability constraint ε for DS-CDMA is given by:
ε≤≤ β )( MSIRP
To evaluate the outage probability we consider on a typical receiver at the origin and assume that all transmitters use same transmitted power ρ , or in other word, the distance between each source and its corresponding receiver is a fixed value. Also, we ignore multi-hop routing and just consider one-hop routing. The MAC protocol adopted in this paper is also simple in the sense that all randomly distributed transmitters are presumed to transmit in an ALOHA-type fashion for a given network configuration. Based on these assumptions, upper and lower bound of the transmission capacity of underwater sensor (or ad hoc) networks when we use DS-CDMA are given in the following theorem:
Theorem : Let )1,0(∈ε , 824.0=k , 25.0=α , 2
026.0
.1r
eRr−
=β
.
Upper , DSu
,ελ , and lower, DSl
,ελ , bounds on the transmission capacity of underwater sensor networks, subject to the outage constraint ε for DS-CDMA, when transmitters employ a fixed transmission power ρ for receivers that are a fixed distance r away are:
)O(M.1 22
026.0, εε
βπλε +=
−
re r
DSu
)()21.(])21(
.).[(1.1 2222
, εεαα
απ
λ αε oMRk
DSl +−
−≥
as 0→ε .
Proof :
SIR for underwater acoustic channels is determined in Appendix. Hence, the outage constrain can be written as follows:
=≤ )(M
SIRP β εβ ≤≤∑ +−−
+−−)
||.
.()(026.0
)(026.0
21
21
MXe
reP
i
ki
X
kr
i
707700
![Page 3: [IEEE 2008 Second International Conference on Sensor Technologies and Applications (sensorcomm 2008) - Cap Esterel, France (2008.08.25-2008.08.31)] 2008 Second International Conference](https://reader037.pdfslide.us/reader037/viewer/2022092905/5750a8491a28abcf0cc773fe/html5/thumbnails/3.jpg)
Where k is the spreading factor, r is the distance between source and its one-hop destination, and Xi represents distance between i th interferer and receiver.
Considering the outage constrain, the outage event can be defined by:
⎭⎬⎫
⎩⎨⎧
≥∑=λ +−−β
+−− )(026.0)(026.0 21
21
.||.)( krMi
ki
X reXeE i
We will define events ),( sEl λ and )s,(Eu λ such that ),()(),( sEEsE lu λ⊆λ⊂λ and the probabilities of all events )(λE , ),( sEl λ and ),( sEu λ increase in λ . Clearly, ))s,(E(P))(E(P))s,(E(P lu λλλ ≤< , therefore if we
can find the largest possible *λ such that *λλ > results ελ >)),(( sEP u then it follows that
ελ >))(E(P , i.e. the outage probability is exceeds our outage constraint ε and thus an upper bound on the contention density will be obtained. Same to this approach, we can determine the lower bound using )s,(El λ . In order to define )s,(El λ and )s,(Eu λ , we split the network in two areas, regions inside and outside a circle of radius s around the typical receiver at the origin, denoted by b(O, s) and s)O,(b respectively. The radius s is selected to be small enough such that one or more nodes within distance s would cause an outage. We consider the DS-CDMA case. The outage events associated with these two areas are defined as follows. Definition:
}0),({),( ≠∩Π= SObSEu λ
⎭⎬⎫
⎩⎨⎧ ≥∑= +−−
∩Π∈
+−− )(026.0
),(
)(026.0 21
21
.||.)( krM
SObi
ki
Xf reXeE i
βλ
),(),(),( SESESE ful λλλ ∪=
According to the definition, ),( sEu λ consists of all outcomes where there are one or more transmitters within distance s of the origin O, and the event ),( sE f λ consists of
all outcomes where the set of transmitters outside the ball b(O, s) generate enough interference power to cause an outage at the origin.
In order to find an upper bound on the transmission capacity of underwater sensor networks, we need to find the value of s. According to the definition, the radius s should be selected to be small enough such that even one node within distance s would cause an outage. Hence, s can be found from the following inequality
θ≥+−− )k(S. s.e 21
0260
Where )(026.0 21
. +−−β
=θ krM re . Using k=1.5, we have
θ≥−
2
0260
se s.
. After some mathematical calculations, bound on s
can be approximated byθ1≈≤ maxss . Substituting θ , we
have21
2
026.0 −−
⎥⎥⎦
⎤
⎢⎢⎣
⎡≤
res
rMβ . Note that for
21
2
0260 −−
⎥⎦
⎤⎢⎣
⎡≤
re
sr.
Mβ the
events have the following property:
),()(),( sEEsE lu λλλ ⊆⊂
Upper Bound: We calculate )),(( sEP u λ , set it equal toε , and solve it for λ . Consider the probability that there are no transmitters in b(O, s), which is simply the void probability for b(O, s). For a Poisson point process in the plane with intensityλ , the probability of existence of k nodes in the area A is
!k)A(e)Ak(P
kA λλ−
=∈ .
Thus, 2
101 Su e))s,O(b(P))s,(E(P λπλ −−==∩Π−=
Now, given the outage constraint ελ ≤)),(( sEP u , we obtain the parameterized upper bound
)(Lns)s(u επ
λ −−= − 11 2
for all ).,0(21
2
026.0 −−
⎥⎥⎦
⎤
⎢⎢⎣
⎡∈
reMs
r
β and all ),( 10∈ε .We
further optimize this bound over s and find that the tightest (smallest) upper bound is obtained by choosing the largest
possible 21
2
026.0
max .−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡==
reMss
r
β. Thus, the final upper
bound on the optimal contention density is
)O(.1)1(.1 22
026.0
2
026.0εε
πε
πλ ββ
ε +=−⎥⎥⎦
⎤
⎢⎢⎣
⎡−=
−−
reLn
re r
Mr
Mu
Lower Bound: In order to detemine the lower bound, we
need to calculate )),(( sEP l λ . Hence, we have )),(),(()),(( sEsEPsEP ful λλλ ∪=
)),(()).,(()),(()),(( sEPsEPEPEP fufu λλελελ −+= Thus, this outage constrain can be rewritten as
708701
![Page 4: [IEEE 2008 Second International Conference on Sensor Technologies and Applications (sensorcomm 2008) - Cap Esterel, France (2008.08.25-2008.08.31)] 2008 Second International Conference](https://reader037.pdfslide.us/reader037/viewer/2022092905/5750a8491a28abcf0cc773fe/html5/thumbnails/4.jpg)
1)),(( ελ ≤sEP u , 2)),(( ελ ≤sEP f Now, we define the contention density imposed by
conditions in these two inequalities to be }),((|sup{)( 1
1 ελλλε ≤= sEPs uu
}),((|sup{)( 22 ελλλε ≤= sEPs ff
Thus, the lower bound of the optimal contention density can be derived as
}} , {inf{ 21
21 ),(,
εε
εε
ε λλλ fus
l Sup=
for ),0(21
2
026.0 −−
⎥⎦
⎤⎢⎣
⎡∈
reMs
r
βand ),( 21 εε satisfying
εεεεε =−+ 2121 .
Same to the upper bound, we have
)O( 1)( 21
21 εεπ
λε += −ssu for )1,0(1 ∈ε and s >0.
In order to determine )(2 sfελ , we first consider the
event fE . Let )(026.01 21
. +−−= kr reR β . Therefore, this event can
be rewritten as
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
≥= ∑∩Π∈
+−− MRXeEsObi
ki
Xf
i
),(
)(026.0 21
||.)(λ
It is not possible to compute )(2 sfελ directly; we will find a
lower bound using Chebyshev’s inequality and Campble theory [12]. Let
∑∩Π∈
+−−=),(
)(026.0 21
||.),(sObi
ki
X XesY iλ
Using Campble theory, we have
λμπλλ ).(..2)],([ )(026.0 21
srdrresYEs
kr =∫=∞ +−−
λσπλλ ).(.).(2)),(( 22)(026.0 21
srdrresYVars
kr =∫=∞ +−−
Therefore, the lower bound on )(2 sfελ is obtained as follows:
}),((|sup{ 22 ελλλε ≤= sEP ff
})||.(|sup{ 2),(
)(026.0 21
ελ ≤≥= ∑∩Π∈
+−− MRXePsObi
ki
X i
})),((|sup{ 2ελλ ≤≥= MRsYP
}1)(
|)(),(||sup{ 2ελμ
λμλλ ≤⎟⎟⎠
⎞⎜⎜⎝
⎛≥
−−≥
sMRssYP
})).((
).(|sup{ 22
2ε
λμλσλ ≤
−≥
sMRs
)(2 sfελ=
Clearly, )(2 sfελ is achieved when 22
2
)).(().( ε
λμλσ =
− sMRs .
Solving this equation for 2ελ f we have
)()(
)()( 2222
22 εε
σλε O
sMRsf += .
We now focus on obtaining the lower bound. It can be seen that if we increase )),(( sEP u λ then )),(( sEP f λ decreases,
i.e., changing s or ),( 21 εε must increase one of them and decrease another, simultaneously. Thus, a condition for the optimized lower bound is that the choice of s and ),( 21 εε such
that )()( 21 ss fuεε λλ = . Hence, we will have
1222
2 1.1)(
)( επ
εσ ssMR = .
Solving this equation is not straightforward. Consequently, we use Newton’s approach to find the root of equation and then approximate its variations. After some mathematical computations, the approximated root can be achieved which is
equal to 25.0824.0)(
AAsa = where 824.0=k and 25.0=α are
fixed parameters and1
22.)(21
εεMRA = . Substituting as in
)(1 suελ we have
.1)(1)( 12
2
12, 21 ε
πε
πλ
α
αεε
kA
Aksl == − .
Finally, we should find maximum value of 21,εελl . After some mathematical computations, it can be shown that this maximum is occurred in εαε )21(*
1 −= , and αεε 2*2 = .
Substituting these values, we obtain the lower bound as follows:
2 22
1 1. .[( ) . ] .(1 2 )(1 2 )l MR
kε ααλ α ε
π α= −
− where )(026.01 2
1. +−−= kr reR β and 0→ε .
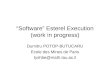
5. Simulation Results In order to simulate the analytical results, we consider an area with 20 km×20 km dimensions. Thorp’s formula is used for the acoustic attenuation model. Analytical and simulation results are demonstrated in Fig.1. Due to approximations in mathematical computations, simulation carve is not between upper and lower bound for small values of spreading gain. However, it can be seen that this carve is exactly between bounds for some greater values of spreading gain. As a result, while the transmission capacity of wireless radio frequency (RF) ad hoc or sensor networks increase with spreading gain M with order α
2
M ( α is the path-loss exponent), this variation, due to different propagation model, is linear for
709702
![Page 5: [IEEE 2008 Second International Conference on Sensor Technologies and Applications (sensorcomm 2008) - Cap Esterel, France (2008.08.25-2008.08.31)] 2008 Second International Conference](https://reader037.pdfslide.us/reader037/viewer/2022092905/5750a8491a28abcf0cc773fe/html5/thumbnails/5.jpg)
0 10 20 30 40 50 60 7010
-4
10-3
10-2
10-1
Spreading Gain
Max
imum
Den
sity
of S
imul
tane
ous
Tra
nsm
issi
ons
Upper Bound•Lower BoundSimulation Result
Figure 1. Maximum permissible density of simultaneous transmissions versus
spreading gain
underwater ad hoc or sensor networks in the same model. 6. Conclusion and Future Works
In this paper, upper and lower bounds on the transmission capacity of underwater sensor networks are determined. It is assumed that the distance between source and destination is a fixed value. Transmission capacity is defined as the maximum permissible density of simultaneous transmissions that allows a certain probability of successful reception. As a future work, we plan to determine this capacity for a more realistic case. For example, power control can be considered where the distance between sender and receiver is variable. Also, in this paper we assumed that a simple MAC protocol in the sense that all randomly distributed transmitters are presumed to transmit in an ALOHA-type fashion for a given network configuration. However, we can extend the analytical approach to cover a more complicate MAC protocol like IEEE802.11 MAC sub-layer.
References
[1] E.Sozer, M.Stojanovic and J.Proakis, "Underwater
Acoustic Networks," IEEE Journal of Oceanic Engineering, vol.25, No.1, January 2000, pp.72-83.
[2] M.Stojanovic, “On the relationship between capacity and distance in an underwater acoustic channel,” in Proc. First ACM International Workshop on Underwater Networks (WUWNet), Sept. 2006.
[3] M. Sheikh Zefreh, P. Khadivi,”Maximum Permissible Density of Simultaneous Transmissions in Underwater Sensor Networks”, IEEE International Conference on Information & Communication Technologies, Syria, April 2008.
[4] M. Sheikh Zefreh, M.Sc. Thesis, Department of electrical and computer engineerin, Isfahan university of technology, Isfahan, IRAN, March 2008.
[5] P. Gupta and P. Kumar, “The capacity of wireless networks,” IEEE Transactions on Information Theory, vol. 46, no. 2, pp. 388–404, March 2000.
[6] M. Grossglauser and D. Tse, “Mobility increases the capacity of ad hoc wireless networks,” IEEE/ACM Trans. Netw., vol. 10, no. 4, pp. 477–486, Aug. 2002.
[7] S. P. Weber, X. Yang, J. G. Andrews, and G. d. Veciana, “TransmissionCapacity of Wireless Ad Hoc Networks With Outage Constraints”, IEEE Transactions on Information Theory, vol. 51, no. 12, December 2005.
[8] M.Stojanovic, “On the Design of Underwater Acoustic Cellular Systems,” in Proc. IEEE Oceans Conf., 2007.
[9] A. F. Harris, M. Zorzi,”Modeling the Underwater Acoustic Channel in ns2”, in Proc. of the Second ACM International Workshop on UnderWater Networks (WUWNet07), 2007.
[10] W. H. Thorp, “Analytic Description of Low Frequency Attenuation Coefficient”, J. Acoust. Soc. Am., 42, 270-271, 1967.
[11] R. J. Urick, Principles of Underwater Sound, McGraw-Hill, 1983.
[12] D. Stoyan, W. Kendall, and J. Mecke, Stochastic Geometry and Its Applications, 2nd ed. New York: Wiley, 1996.
APPENDIX
In an acoustic channel, the simple path loss model does not hold. Instead, the attenuation depends on the signal frequency as well as the transmission distance. As mentioned earlier, attenuation that occurs in an underwater acoustic channel over a distance r for a signal of frequency f is given by:
rk farfrA )(),( =
where, k is the spreading factor, and a(f ) is the absorption coefficient. Thorp’s formula is one of the most famous absorption models for underwater acoustic propagation and is as follows:
003.01075.24100
441
11.0)(log10 242
2
2+×+
++
+= − f
ff
fffa
where a(f ) is in dB/km, and f in kHz. (Note that although this formula is used in many recently
published papers [2],[ 8], [9], the correct one is as follows:
003.01075.24100
441
11.0)(log10 242
2
2
2+×+
++
+= − f
ff
fffa
which can be found in the original paper [10] and [11]. However, the first formula is used in this paper.) Thus, if we denote power spectral density of transmitted signal by tS , received power at a receiver at distance d away from the transmitter can be obtained as
dfrf
ff
ffrS
dffarS
dffrASrP
Wff
kt
Wff
rkt
Wff t
10ln.).003.010.75.2
41004.4
1011.0(exp(..
)(
),()(
25
2
2
2
1
minmin
minmin
minmin
++
∫ ++
+−=
∫=
∫=
−
+−
+ −−
+ −
710703
![Page 6: [IEEE 2008 Second International Conference on Sensor Technologies and Applications (sensorcomm 2008) - Cap Esterel, France (2008.08.25-2008.08.31)] 2008 Second International Conference](https://reader037.pdfslide.us/reader037/viewer/2022092905/5750a8491a28abcf0cc773fe/html5/thumbnails/6.jpg)
dfDCf
ffB
ffArS Wf
fk
t
))
41001(exp(..
2
2
2
2minmin
++
∫ ++
+−= +−
Where coefficients A, B, C, D are
10ln103,10ln1075.210ln4.4,10ln011.0
45 rDrCrBrA
−− ×=×===
Calculating the last integral is not straightforward; therefore we use the following approximations
11 2
2
≅+ ff
, 41004100
22 ff
f ≅+
.
The operating frequency in underwater communication systems is few kHz, thus it seems that these are fair approximations. Thus we can rewrite P(r)
∫
∫
∫
+−
+−
+−
−=
+++−≅
+++
++
−=
Wff
kt
Wff
kt
Wff
kt
dfEfKrS
dfDCffBArS
dfDCff
fBf
fArSrP
min
min
min
min
min
min
)exp(...
))4100
(exp(..
))41001
(exp(..)(
2
22
2
2
2
2
where ))(exp( DAK +−= and CBE +=4100
.
Using error function erf (x)
∫ −= x dxerf 02)exp(2)( λλ
π
we have
[ ])()(2
...
)exp(...)(
minmin
2min
min
ferfWferfE
KrS
dfEfKrSrP
kt
Wf
fk
t
−+=
−=
−
+− ∫
π
Setting ( ))()(6.17 minmin ferfWferf −+=γ and after some mathematical computations, the received power would be of the form:
)(026.0 21
...)( +−−= krt reSrP γ
Figure 2. The accuracy of the approximations
Fig. 2, represents two curves. One of them is the received
power when we do not use the approximations, and the second one is the received power when we use these approximations. The parameters that are used are as follows: r=1km k=1.5 St=1watt/kHz W=30 kHz
It seams that these two curves are matched and the difference is negligible.
Now, based on the previous calculations, we can obtain signal to interference ratio as follows
∑
∑ ∫
∫∑
+−−
+−−
+ −
+ −
=
==
i
ki
X
kr
i
Wff it
Wff t
ii
Xe
re
dffXAS
dffrASIrPSIR
i )(026.0
)(026.0
1
1
21
21
min
min
min
min
||.
.
),(
),()(
As a conclusion, although received signal power is not independent of operating frequency, the ratio of signal to interference is independent of frequency.
0 5 10 15 20 25 30 35 400
2
4
6
8
10
12
14
fmin (kHz)
Rec
eive
d P
ower
(W
att)
Real Values•Approximation
19 19.5 20 20.5 21
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
fmin (kHz)
Re
ceiv
ed
Po
wer
(W
att
)
Real Values•Approximation
711704












![CompilationandWorst-CaseReactionTimeAnalysisfor MultithreadedEsterel… · Esterel can be executed on a reactive processor [3]. These processors directly support reactive control](https://img.pdfslide.us/doc/110x75/603aabbd25583b53ea64e2b4/compilationandworst-casereactiontimeanalysisfor-multithreadedesterel-esterel-can.jpg)