Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 International Radar Symposium (IRS) - Wroclaw, Poland (2008.05.21-2008.05.23)] 2008 International Radar Symposium - Least-squares algorithm for determining emitter position](https://reader037.pdfslide.us/reader037/viewer/2022092707/5750a6701a28abcf0cb9948a/html5/thumbnails/1.jpg)
Least-squares algorithm for determining emitter position from passive radar bearings
Adam Kawalec*, Marek Andrzej Kojdecki**, Bronisław Wajszczyk*
* Institute of Radioelectronics, Military University of Technology; ul. S. Kaliskiego 2,
00-908 Warsaw, Poland; email: [email protected]; [email protected]
**Institute of Mathematics and Cryptology, Military University of Technology; ul. S. Kaliskiego 2, 00-908 Warsaw, Poland; email: [email protected]
Abstract: Determination of emitter position from passive radar bearings is transformed into a linear least squares problem. The solution of normal equations enables fast and reliable spatial localisation of electromagnetic emitter. The algorithm was tested with data simulated as randomly perturbed bearings from a system of two or three radar stations providing azimuth and elevation or only azimuth of an emitter. Results of computational tests are given.
1. Linear least-squares algorithm for localising point emitter Localisation of a point electromagnetic emitter in three-dimensional space from passive radar bearings can be interpreted as a linear least-squares problem [1,2]. For given positions
],,[ iiii zyx=p , ni ,...,2,1= , in Cartesian co-ordinates, of n radar stations ( 1>n ) receiving signal from an investigated object, a geometrical bearing from each station is registered as azimuth iϑ and elevation iβ of an object in local spherical co-ordinates. Three Cartesian co-ordinates ],,[ zyx=p of the unknown object position relate each bearing by two equations:
ii
i
yyxx ϑtan=
−− and
( ) ( ) i
ii
i
yyxx
zz βtan22
=−+−
− , (1)
where πϑπ +≤<− i and πβπ 21
21 +≤≤− i are assumed.
To avoid apparent singularity related with tangent function, these equations can be re-written in one of the following equivalent forms: iiii yxyx ϑϑ tantan −=− , iiiiii zyβzyβ ϑϑ costancostan +−=+− , for ( πϑ 4
1≤i or πϑ 43≥i ) and πβ 4
1≤i ; iiii yxyx ϑϑ tantan −=− , iiiiii zβyzβy cotcoscotcos ϑϑ −=− , for ( πϑ 4
1≤i or πϑ 43≥i ) and πβπ 2
141 ≤< i ;
iiii yxyx +−=+− ϑϑ cotcot , iiiiii zxβzxβ ϑϑ sintansintan +−=+− , for πϑπ 4
341 << i and πβ 4
1≤i ; iiii yxyx +−=+− ϑϑ cotcot , iiiiii zβxzβx cotsincotsin ϑϑ −=− , for πϑπ 4
341 << i and πβπ 2
141 ≤< i ;
![Page 2: [IEEE 2008 International Radar Symposium (IRS) - Wroclaw, Poland (2008.05.21-2008.05.23)] 2008 International Radar Symposium - Least-squares algorithm for determining emitter position](https://reader037.pdfslide.us/reader037/viewer/2022092707/5750a6701a28abcf0cb9948a/html5/thumbnails/2.jpg)
that correspond to matrix forms
ii apA = ,
−−
≡ii
ii ϑβ
ϑcostan0
0tan1A ,
+−
−≡
iiii
iiii zy
yzxϑβ
ϑcostan
tana , (2)
for ( πϑ 41≤i or πϑ 4
3≥i ) and πβ 41≤i ;
ii bpB = ,
−
−≡
ii
ii βϑ
ϑcotcos10
0tan1B ,
−
−≡
iiii
iiii zy
yxβϑ
ϑcotcos
tanb , (3)
for ( πϑ 41≤i or πϑ 4
3≥i ) and πβπ 21
41 ≤< i ;
ii cpC = ,
−−
≡ii
ii ϑβ
ϑsin0tan
01cotC ,
+−
+−≡
iiii
iiii zx
yxϑβ
ϑsintan
cotc , (4)
for πϑπ 43
41 << i and πβ 4
1≤i ;
ii dpD = ,
−
−≡
ii
ii βϑ
ϑcotsin01
01cotD ,
−
+−≡
iiii
iiii zx
yxβϑ
ϑcotsin
cotd , (5)
for πϑπ 43
41 << i and πβπ 2
141 ≤< i .
All elements of coefficient matrices of these systems of linear algebraic equations are of modulus less than 1. If the number of radar stations is greater than one ( 1>n ), then the relation between co-ordinates of an investigated object (unknown) and bearings (known) with respect to p takes the form of an overestimated system of n2 linear algebraic equations:
eEp = ,
≡
nE
EE
1
,
≡
ne
ee
1
, (6)
where each pair ( )ii eE , is of one of forms (2)-(5) and E , e are block matrices. If the data ( )ii eE , , ni ,...,2,1= , are perturbed (as usually real bearings are), then this system of equations is inconsistent in general and the radiation source position may be approximately determined as a solution of the linear least squares problem eEp −~ , (7) or equivalently as a solution of the system of normal equations ( ) eEpEE TT = . (8) Problems (7) and (8) have the same unique solution when coefficient matrix E is of full rank,
( ) 3rank =E (what implies that ( ) 0det ≠EET and system (8) is consistent and determinate). For a system of at least two radar stations ( 1>n ) this condition is held if bearings from every two different stations differ. This implies the approximate condition for effective localisation: the distance from a station to limits of an observed area g, the smallest distance between stations s, the smallest emitter altitude determined at the area limit w and the bearing error u
(of azimuth or elevation, in radians) should satisfy the inequalities ugs > and u
gw > .
System of linear algebraic equations (8), when being determinate, can be solved with using Gaussian elimination with partial pivoting or better with using Cholesky decomposition of coefficient matrix EET .
![Page 3: [IEEE 2008 International Radar Symposium (IRS) - Wroclaw, Poland (2008.05.21-2008.05.23)] 2008 International Radar Symposium - Least-squares algorithm for determining emitter position](https://reader037.pdfslide.us/reader037/viewer/2022092707/5750a6701a28abcf0cb9948a/html5/thumbnails/3.jpg)
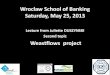
2. Test of algorithm on simulated data The algorithm for solving the emitter localisation problem, defined by formulae (2)-(5) and equation (8), was tested on simulated data. Two systems of two ( ( ) km30,dist =BA ) or three ( ( ) km30,dist =CA , 120=∠ABC ) radar stations, as sketched in Fig. 1 and Fig. 2, were studied. The realistic bearings were simulated hundred times for each node of uniform square grid with step of km1 , defined in square observation zone with edge of km80 (as in Fig. 1 and Fig. 2), and for emitter altitude of km4 , by adding errors produced as random numbers of standard normal distribution multiplied by rad01745.01 ≈ . For each perturbed bearing equation (8) was solved by using Cholesky algorithm. Afterwards, the root-mean-square error of determining the emitter position was calculated for each point, separately for horizontal position (in Oxy plane) and for altitude.
Fig. 1. The root-mean-square errors of determining horizontal emitter position from hundred bearings provided by radar stations: from azimuth provided by two stations (top left, with the dead zone marked), from azimuth and elevation provided by two stations (top right), from azimuth provided by three stations (middle left and bottom left), from azimuth and elevation provided by three stations (middle right and bottom right); presented as error level map or full diagram.
![Page 4: [IEEE 2008 International Radar Symposium (IRS) - Wroclaw, Poland (2008.05.21-2008.05.23)] 2008 International Radar Symposium - Least-squares algorithm for determining emitter position](https://reader037.pdfslide.us/reader037/viewer/2022092707/5750a6701a28abcf0cb9948a/html5/thumbnails/4.jpg)
Fig. 2. The root-mean-square errors of determining emitter altitude from hundred azimuth and elevation bearings provided by two (top left and bottom left) or three (top right and bottom right) radar stations; presented as error level map or full diagram.
Two variants of computations were realised: with determining emitter position only in Oxy plane from azimuth bearings and with determining emitter position in space from azimuth and elevation bearings. The errors of determining the horizontal position are displayed in Fig. 1 and the errors of determining the altitude are displayed in Fig. 2.
Conclusions The new version of algorithm enables fast and reliable determination of emitter position. The excess of information is necessary for reliable localisation of emitter from perturbed bearings. The least-squares estimates of emitter position determined from azimuth and elevation bearings are more precise than those from only azimuth bearings. Similarly, the estimates obtained with using three radar stations are more precise than those obtained with using two stations. The dead zone characteristic for a system of two stations providing only azimuth bearing disappears when both azimuth and elevation are taken into account. This work is financed by the Polish Ministry of Science and Higher Education in years 2007-2010 in the frame of ordered research project PBZ-MNiSW-DBO-04/I/2007.
Reference: [1] Wajszczyk B., “Efektywność algorytmów estymacji pozycji źródła emisji mikrofalowej
w pasywnym systemie obserwacji technicznej” (“Effectiveness of algorithms for estimating position of a microwave emitter in a passive system of observation”), Doctoral thesis, Military University of Technology, Warsaw, Poland, 2005, in Polish.
[2] Kawalec A., Kojdecki M. A., Wajszczyk B., “Non-iterative algorithm for determining emitter position in three-dimensional space”, Proceedings of 16th International Conference on Microwaves, Radar and Wireless Communications, Kraków, Poland, 22-24.5.2006, pp.1176-1178.