Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 IEEE/OES 9th Working Conference on Current Measurement Technology - Charleston, SC, USA (2008.03.17-2008.03.19)] 2008 IEEE/OES 9th Working Conference on Current Measurement](https://reader031.pdfslide.us/reader031/viewer/2022020213/5750a6931a28abcf0cba984a/html5/thumbnails/1.jpg)
(Proceedings ofthe IEEEI/OES/CIItC Ninth Working Conference on Current !Measurement Technofogy
A Least Squares Approach to InvertingDoppler Beam Data to World Coordinates
L. Zedell Francis-Yan Cyr-Racine2
1Memorial University of Newfoundland, St. John's, NL2 McGill University, Montreal, QC
Abstract - Doppler profilers measure velocity collected from the other beams. The most common oc-
components along the axis of three or four diverging currence of this situation is in the presence of activelyacousticbeams. Instrument firmware combines these swimming fish (see [1]). Normally, the rate of data lossar-o:istic- bearnf. Instrtuzuient nirniware coiiibiies these
meaurdcmpnensodtemie te is relatively low so that adequate quality velocity pro-thaureecomponentsloiy ptrofierelatie totherlyin- files are still recovered. The method presented in thisthreecomponent vlcty poie reatv to th npaper was in fact dLeveloped wvith the pulrpose of recov-strument. By correcting for instruiment attitude and p
velocity, these instrument referenced velocities are ering the velocity of the fish that were intermittentlytrasfome t a "e s detected. More generally, the method can be used anWtransform-dl int;o a "world" coordilnatc- system and t7n aaac ue ohg ae f(noniirt
averaged. In the presence of corrupted data, someinstrument referenced velocity estimiates will be in- contamination.w~~~I0n a tyrpical velocity xrcinshtedt ovalid and profiles can only be generated if a suffi- I vlcy extraction sheme., data from
the various beams are combined to form an instrumentCientit niumiiber of Acceptable raw profiles rema'in. Th'is referenced velocity. This velocity is then corrected topaper presents an alternatl've approaach to av^erag- I
paerprsetsanaleraivaprac taerg "world" coordinates by appropriate rotations based oning data that does not require the tiransformiiationi of instrument heading, pitch and roll, and these valuesdata to instrument referenced profiles. The individ- canl bev avverXa ed to producee the eventual veloQcitr mea-ual velocity estimtates fom each beam are treatedasdsrt esrmeqe o tat. surement. As an example, consider a four beam instru-as dliscrete measuremenlts along a ulnique orientation. n-eftianuwr oreiiaiiihbAi ietda
A least squares algorithm is thenlused to solve for mnto in canupwar iventatio with beams dthebathe underlying velocity field. The advantage of th'is
.1. ~~~~~~~~directions can beu defi:ned biy qiiit vtectors:approach is that even if data fom only one beamis accepted as accurate, that measurement can beincorporated into the final veloclty estimate. As aresult, the method will work on sparse data sets: ={sin 20 0 cos 20}uncertain:ties are explicitly calculated so that the ac-curacy of the velocity estimates is quantified on a bi = {O,-sin20,cos20}profile by profile basis. The method i:s applied to 4 {-sin 20,0, cos 20}.data collected in a region of extremely high fishconcentrations (at ties in excess of 1 fish per cubic Each beam measures a velocity componett (relative tometer). By appropriately choosing threshold param- the instrument) given by,eters it is possible to extract both the fish and thewater velocity froom the same data,. ^ V=b- - V: (2)
L IN3TRRODUCTION Iwhere V is the water velocity and i = 1,2,3,4 is theDoppler profilers operate by assuming that the water beam number. These measurements are combined to
flow is homogeneous Over the sampling volume of the extract the velocity relative to the instrumetnt ass:instrument. Component velocity measuremen;ts from theindividual beams are combined to determirne the over- =4T (V& - Vb4) / (2 sin 20),all water velocity. Given that these instrumnents haveacoustic beams that are directed at of order 50' to 1 -Vb)/(2sin 2each other (in the vertical sense), the samnple volume (Vb1 + Vb2 + V3 + V64) /(4 cos 20)}can be many 1O's of meters across. There are circum-stances where data from one or more of the beams The instrument referenced values can be averaged di-will be corrupted while other beams still contain good rectly if the instrument is not free to move (for exam-data. In this situation, the velocity estimate is rejected ple in ai bottom mounted confguraion). Itn general theeliminlating not onlyt the bad data from thSe effcted instrument is free to move and sXo the individual in-beams, but also anly good dIatta that mLight hav been strument referenced: vaues are corrected for instrument
1-4244-1486-51081$25.OO ©2008 IEEE 39
![Page 2: [IEEE 2008 IEEE/OES 9th Working Conference on Current Measurement Technology - Charleston, SC, USA (2008.03.17-2008.03.19)] 2008 IEEE/OES 9th Working Conference on Current Measurement](https://reader031.pdfslide.us/reader031/viewer/2022020213/5750a6931a28abcf0cba984a/html5/thumbnails/2.jpg)
Proceedings ofthe IEEEI/OES/CIItC Ninth Working Conference on Current ¶kleasurement Technofogy
orifentation and it is these corrected values that can Data need not be restricted to the sampling depthsthen be averaged, of the Doppler profiler. W re-bin the data into regu-
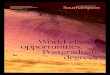
If using (3) to extract velocities it is clear that if lar depth intervals and in this process account for anyone of the component values is missing, the resulting shift in sample depth associated with instrument pitchvector estimate is incomplete. The advantage of the and roll. Similarlly, separate sample time intervals canfour beam system is that even with the loss of data be chosen.from one beam, a unique solution is still possible withonly three beams (the so called three beam solution). II. EXAMPLE DATA SETHowever, in the occurrence of additional beam failuresor with a three beam system, no solution is possible. During the winter of 2004-05, a pair of RDI 150 kHizThat data point cannot be added into the en-semble WorkHorse ADCP's were deployed in Smith Soundd onaverage. the East coast of Newfoundland (see Fig. 1). SrmithA different approach to solving for the un-derlying Sound is a long narrow inlet (about 30 km long and
Velocity is to treat the data from each beam as inde- 2 km wide) with a depth of around 200 m. Smithpendent of the other beams. Each velocity estimate is Sound is known as an over-wintering area for Northernconsidered as a unique component sample of some un- Cod And the deployment site, indicated by the x inknown velocity field. Any sample can then be expressed Fig. 1, Was selected With the goal of extracting veloc-as: ity measureements of the fish rather than that of the
tF= V w k = KY ± V k2 + K k. (4) water. For this purpose data were collected in instru-I I tS x XII zjment coordinates using small depth bins (1.2 m). Data
where V = {1,V4K} is the velocity to be measured were averaged over 15 pings with no delay betweenand k= {k, jkz} is a uit votor defining e pings tat tre e ired in un-instantaneous orientation of the j th component mea- der 2 seconds. The deployment geometry is showvn insurement (in world coordinates). In this approach, k Fi 2, two instruments were used becse of the rangeincorporates both the beam sample geometry and the limitation of the instruments (reduced by the use ofinstrument orientation (as distinct from the instrument small depth bins) and data storage restrictions. Profilesreferenced beam vectors identified in (1)). were sampled every 3 anid 5 minutes for the down-The mathematical problem now is to find the best ward and upward looking instruments respectively: the
choice of the utnknown 17, !, atnd K that can explain instrument configurations are summarized in Table I.the observed v;'s. We have chosen as our goodness-of- The instruments were deployed for a 6 month periodfit measure the summed squared error: starting on Decem-ber 1, 2004.
. _YU i (5)48.4
This is a standdard fitting problerm where the values of Smith SouV1, ;, and are chosen to minimize Zc2, that is we ndrequire: aaz4
& 0
E;e f0 de1
(see for example [2]). 48.2u ~~~(6) 42
09 -J 48.1 4OK '
(see for examnple [2]). 48EVariance in the x-component velocity estimate is 54 53.8 53.6 53.4
found by forming Longitude ( VV
2 (OK{0TW 2 Figure 1: Inset shows location of Smith Sound on Newfound-V. = cr2 J (7) land coast, and X identifies the morn location in Smitht
k~~ OVJ /~~~Sound.
where the sum is over all observations and ar2 is theobserved variance in individual (beam referenced) veloc- An overview of the 6 month deployment is providedity estimates: e;xpressions for 1t a,nd K variane,? are in Fig. 3 from the backscatter intensity records offound by replacing the x-component with the y- and the Doppler profilers. This data has been calibratedz-component re<spectively. The assumuption ofS a commonl to abisolulte lbackscatlter ulsinlg the= method d>escribed invalue for cr2 is reasonab}le beicaulse all beams sample [3]. The oveerwinterinag cod (tiden:tifiedX by regionls of in-with the s:ame operating paramneters. creasedl backscatter in FZig. 3) typically remainz within:
40
![Page 3: [IEEE 2008 IEEE/OES 9th Working Conference on Current Measurement Technology - Charleston, SC, USA (2008.03.17-2008.03.19)] 2008 IEEE/OES 9th Working Conference on Current Measurement](https://reader031.pdfslide.us/reader031/viewer/2022020213/5750a6931a28abcf0cba984a/html5/thumbnails/3.jpg)
Proceedings ofthe IEEEI/OES/CYItC [inth Working Conference on Current fMeasurement Technofogy
Surface Backscatter Strength S (dB re 1 mi1)
as ~~~~~~~~~~~~~~-40Floatation 9 - 25 m 80
A 1 W S I~~~~~~~~~~~~~~~~~~~~~S ~~~~~-60Floatation - 5Cm ?f II YE
z ID~~~~~~~~~~~~~~~ 140 8
==0 -90ADCP2479 - 152m16
Floatation - 154m 180ADCOP 879 156m -110
20001101 02/20 04/11 05/31
Month/Day of 2005
Figuure 3: Backscatter record for both upwrard and downwardlooking Doppler profilers. The instruments are located near
Acoustic 155 m depth and this accounts for the lack of data in theRelease- 200Gm band between 150 and 158 m. The bottom is at 203 m.Anchor m - 20m Overwintering cod appear as regions of increased backscatter
near the bottom between 01/01, and 02/20 and then againFigure 2: Schematic diagram of Smith Sound mooring:- depDths near 04/11.(in mieters) are provided for each component. Note the largegap between flotation at 50 m and ADCP 2479 at 152 m.
TABLE I6
PROFILER SAMPLING CONFIGURATIONS
Instrument Bin Pings per Sample Binis17Depth Size Ensemble interval E
(i) (in) (mm)
152 1.20 15 5 76 190156 1.20 15 3 41
200
31 36 41 46 5110 or 20 im of the bottom but there are large varia- Day of 2005tionts both in depth interval and concentration (based Figure 4: Backscatter record from the downvward lookingon backscatter strength) of the fish. Doppler profiler from the 20 day period beginning JanuaryWith the data calibrated to absolute backscatter 1ev- 31, 2005 (UTC). Light shades indicate greater backscatter. The
els, the presence of fish in any of the beams can baiids labeld a-e identify the depth intervals from which veloc-bO dOttihiiedbybacksater lvOls.W6 ha usod
ities shown in Fig. 5 have been extracted.bew determined by b}ackWscatter levels. We have useda backscatter strength threshold of S, > -55 dB (re1 m-1) to distinguish the presence of fish. Based on shows a diurnal signal with the fish tending to staythis criterion, data were sorted into observations of fish close to the bottom during daylight hours.and observations of water. These data sets were then Bands labeled a through e in Fig. 4 identify in-converted into final velocities with the least-squares al- tervals where velocities have been extracted, the Eastgorithm using 3 mn depth bins, and 30 minute time component of these velocities is shown in panels e ofaverages. Fig. 5. For each interval, both water and fish veloc-
In order to demonstrate the data recovery, a 20 day ities are shown: water velocities are displaced upwardperiod starting on January 31, 2005 has been analyzed. by 10 cm sil and fish velocities are displaced downThis timie period corresponds to a time wheni fish are by 10 cm,,-,' Velocities are only plotted if the calcu-present in the data record and the velocity processing lated standard deviation is less than 5 cm s-. Fartheralgorithm can be assessed under a variety of conditions. from the bottom (panels a and b), fsh velocities be-Fig. 4 prrovides a backscatLter overview for thfis 20 day comev sparse due to the intermittent presSence of fish.saple periodl. This record provides a, more detailed This situation is reversedt close to the b5ottom (panel e)vieJw of the vriability in fish concentrations ad also wherie w<ater observatio.ns become scarce.
41
![Page 4: [IEEE 2008 IEEE/OES 9th Working Conference on Current Measurement Technology - Charleston, SC, USA (2008.03.17-2008.03.19)] 2008 IEEE/OES 9th Working Conference on Current Measurement](https://reader031.pdfslide.us/reader031/viewer/2022020213/5750a6931a28abcf0cba984a/html5/thumbnails/4.jpg)
(Proceedings ofthe IEEEI/OES/CIItC Ninth Working Conference on Current !Measurement Technofogy
a)20
b)~~~~~~~~~~~~~~~~s-10
-i t. _ -1'0td)
2010 rtu ,'e.s '&1r -1 60ns.2,0
W10 4 A
31 36 41 46 51
Figure 5: East comfponenlt of velocity extr:acted for deplthsof 182.5, 185.5, 188.5, 191.5, and 194.5 (panels a through e). 201_Wter) velocities arc displaced ulp by 10 cm s 1, fish velocities 2are dlisplaiced down bWy10 cmYs-1 E /120
lFig. 5 demonstLrates the- ability to e:xtract velocitiesin the presence of inconsistent dlata but it. is difficult to North (mini/s) -0 20East (minis)assess the degree of success. Another view of the dlatais provided by considering an avrage over the 20 day Figurte 6: V;elocity profiles: light vectors writh enLds joined inrecord beoing considlered. The resulting average profi0les a profile are water velocities derived usin:g conventional process-
shown in * ing7 bold vectors arSe least-squares water veloc=ities, anld dashedae shwll3Fig. 6 wWhere the ligjht vectors (joined vrectors are least-squarnes fish velocities. Error bars indicate stan-at thie end1s) shlow thze velociti0es derived usiXng a toii- dard dleviationls for least-squlares comrputed velocitifes.ventionlal processinlg approach (with nlo attempt to re-ject fish contamlinjated data), thle bold vectors are least speeds (for example at 18,:00 to 21:00 UTC). Whesquares water velocities anxd the dashedl vectors are iLsi hr r ofshrsn teitra rm1:0tvelocities. For the least-squaes exVtracted velocities, er- 17 00 UTC) the least-squares water spee=d agrees withror bars shown at the tip ofx each vector indicate the conlventionally processed speeds.computed standard d1eviation. The conventitonally pro-cessed: dlata sho1w:s a flow reversal withinr the bottom 10m of7 the profile. Thiis reversal is not conlsistenlt withthe water movement in the Sounld: a genleral North- a) Beam 1 Backscatter
10~~~~~~~~~~~~~~~~~~~~~~~~6
West flow as seen) at 0 m depth is expected. Theleast-;squaresx extrac!ted waJter velocitie^s agree with the= 180 ,=.,S.. ==gconventio0nal processin:g abov 180 m, below that depth 2they continue to show the expected North West drift. bBa akcteThele astsquoaresfishvelocities are not resovd above187s
of180 m, below, that depth, they show5(agnersalShouthe).is20ar morDlaed detaibyled vie of th2rcsigreut0a9
be seen bJy expanldinlg a sinsgle time series from one c) EResolved Speedsday of data. Fig. 7 shows the 24 hour record fromitiebruarye11b 2005 UITC (year day 42): Fig. 7a showds F wiitends i
the hackscatterdlaIta with lines beraacketinlgthe187-190 t 5Lnse;t-bnl proces;m depth interval being considered. This depth anrd 3 6 9 12 15time isterawl were selected because itg shtows a ranige of Hour,eFebruary11w2l00sampling conditions. Fig. Tb shows just the backscat-te.r frol the 187-190 m depth interval being sampled. F r 7: a) E d saple of backscatter taken from
FDebruar 11,r 2005plIT (yar80day 420 UT).Lie Wdetfhen
Figq. Te showw s speeda time series fom conventionaldefpth interal 187-190 m om which sample speeds ha beenDoppler processing6 (dotted line) least-squares water extracted. b) Barckscater only from the 187-190 m depth iter-speed (solid line), and least-squares fish speeds (dashed a1.c)7 Extracted speeds: consvenional result, detted line; leastline). At times when both fish and water speeds can be sqtaresvater speed, solid line; least squares fish speed, dashedextracted, the conventionally processes speed appears torrive at an average value between the fsh andwNater
42
![Page 5: [IEEE 2008 IEEE/OES 9th Working Conference on Current Measurement Technology - Charleston, SC, USA (2008.03.17-2008.03.19)] 2008 IEEE/OES 9th Working Conference on Current Measurement](https://reader031.pdfslide.us/reader031/viewer/2022020213/5750a6931a28abcf0cba984a/html5/thumbnails/5.jpg)
Proceedings ofthe IEEEI/OES/CIItC Ninth Working Conference on Current fMeasurement Technofogy
III. DISCUSSION AND CONCLUSIONS of fish. Water velocities were detfermined from obser-vations outside of the fish school. An additional ad-
W have presented a least-squares approach to in- vantage of the least squares approach presented is thatwrting Doppler sonar beam velocity data into a world it is easily modified to any beam geometry. Also, thecoordinate system. In this approach individual beam method directly provides urncertairAy for each velocitydata need not be formed into inistrument referenced estimate.profiles before forming averaged velocity profiles. Thespccific advantage of this inversion approach is that it ACKNOWLEDGMENTworks with sparse data.The method has been demonstrated using data from This work was supported by the National Sciences
a deploymenrt where high concentrations of fish occur and Engineering Research Council. Mr. Jack Foley de-such that reliafble velocity profiles could not normally ployed and recovered the instrumentation with logisticalbe recovered using a conWntional processing algorithm. support provided by Coastal Connections Limited.Both fish and water velocities have been extracted fromthe samme data set by idenitifying the presence of fish REFERENCESwhen backscatter in individual beams exceeded -55 dBz -1 AP l t * 1 * * o 1 ~~~~~[1]Freltdg, H P., M.J. McPhaden aiid P.E. Pull0en GF'sh-id4uced(re 1 m1). Often what this approach gives is fish ve- bias in acoustic Doppler current profiler data', in Proceedingslocities or water velocities depending on the concentra- Oceans '92 pp. 712-717, 2, 1992.tion of fish. However, in the detailed examiple presented [2] Press, W.H., B.P. Flaniiery, S.A. Teukolsky, W.T. Wtter-in Fig. Tc, there arre times when both fish and wa- lnIg, "NumericAl Recipes, The Art of Sietififc Computing",
velocities can be extracted at the same time (see Cambridge Untiersity Press, Cambridge, 818 pp, 1986.ter ve.SOCltlES can e extractec t t ze saroe terne see 03] Deines, K., "B3ackscatter estimation using broadband acousticbetween 18:00 and 21:00 in Fig. 7e). Doppler current profilers," in Proceedings of the IEEE Sixth
It is importA to contrast the present approach Working Conference on Current Measurement, 1999.with the method used by [4] where both fish and wa- [4] Demer, DA., M. Barange, and A.j. Boyd, "Measurements
of three-dimensional fish school velocities with an acousticter Velocities are extracted. in that study. only when Doppler current profiler", Fisheries Research 47, 201-214,backscatter in all four beams of the Doppler profiler 2000.were anomalously high were velocities idenltified as that
43