Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/1.jpg)
2008 IEEE Swarm Intelligence SymposiumSt. Louis MO USA, September 21-23, 2008
A Fuzzy Ant Colony Optimization Algorithm for Topology Design of
Distributed Local Area Networks
Salman A. Khan and Andries P. Engelbrecht
Abstract—Ant colony optimization (ACO) is a powerful opti-mization technique that has been applied to solve a number ofcomplex optimization problems. One such optimization problemis network topology design of distributed local area networks(DLANs). The problem requires simultaneous optimization of anumber of objectives, such as monetary cost, average networkdelay, hop count between communicating nodes, and reliabilityunder a set of constraints. This paper presents a multi-objectiveant colony optimization algorithm to efficiently solve the DLANtopology design problem. The multi-objective aspect of the prob-lem is handled by incorporating fuzzy logic in the ACO algorithm.The performance of fuzzy ACO is evaluated through comparisonwith a fuzzy simulated annealing algorithm. Empirical resultssuggest that the fuzzy ACO produces results of equal qualitywhen compared with a fuzzy simulated annealing algorithm.
I. INTRODUCTION
ANT algorithms are multi-agent systems in which thebehavior of each agent, called an artificial ant (or simply
an ant), is inspired by the behavior of real ants [1]. TheAnt colony optimization (ACO) algorithm [2] is a relativelynew metaheuristic which defines a particular class of antalgorithms. The ACO has a combination of distributed com-putation, autocatalysis (positive feedback) and constructivegreediness to find an optimal solution for combinatorial op-timization problems [1]. The ACO algorithm mimics theforaging behavior of ants. Ant algorithms are one of themost successful examples of swarm intelligent systems [3],and have been applied to a variety of optimization problems.However, most applications of ACO have dealt with single-objective optimization (SOO) problems, where the aim is tooptimize a single objective. In contrast to SOO, multi-objectiveoptimization (MOO) requires simultaneous optimization ofseveral conflicting objectives, and a possible compromisebetween these objectives needs to be found by evaluatingthese objectives [4]. In MOO, the application of ACO hasbeen limited. A few MOO problems where ACO has beenapplied include the multi-objective flow shop problem [5],multi-objective portfolio selection [6], combinatorial circuitssynthesis [7], and multi-objective travelling salesman problem[8].
Many real-world optimization problems are multi-objectivein nature. One such problem is topology design of dis-tributed local area networks (DLANs). This problem requiressimultaneous optimization of a number of design objectives,
Salman A. Khan is with Computer Science Department, University ofPretoria, Pretoria 0002, South Africa (e-mail: engr [email protected]).
Andries P. Engelbrecht is with Computer Science Department, Universityof Pretoria, Pretoria 0002, South Africa (e-mail: [email protected]).
such as network delay, monetary cost, hop count betweencommunicating pairs, and network reliability, under a set ofdesign constraints. Attempts have been made earlier to solvethis problem with optimization techniques such as simulatedannealing (SA) [9], and simulated evolution (SimE) [10].However, application of ACO to the DLAN topology designproblem has not been reported in the literature.
This paper is concerned with the evaluation of a fuzzy multi-objective ACO algorithm for topology design of DLANs.The paper is organized as follows. Section II provides abrief background of the ACO algorithm. In Section III, adiscussion on MOO is provided, with focus on fuzzy logicfor MOO. Section IV briefly describes the multi-objectiveDLAN topology design problem. A detailed description ofthe proposed fuzzy multi-objective ACO (FACO) is given inSection V. Section VI focuses on the performance evaluationof FACO, along with a comparison with a multi-objectiveSA algorithm for the same problem. A conclusion is givenin Section VII.
II. THE ANT COLONY OPTIMIZATION ALGORITHM
The ACO algorithm [2] is inspired from the cooperativebehavior of ants. When an ant travels through a path, it releasespheromone. In the process of finding a path, ants are attractedby pheromone to follow links with the highest pheromoneconcentrations. As time elapses, shortest paths will be morefrequently visited and pheromone will accumulate faster onthem, which in turn causes more ants to select these paths.Thus, the pheromone deposits provide a positive feedback toants by reinforcing good choices.
For ACO, the optimization problem is formulated as agraph. Ants concurrently and asynchronously move throughadjacent states of the problem by building paths on the graph.By moving, ants incrementally construct solutions to theoptimization problem. The movement of an ant is governed bya stochastic local decision policy that makes use of pheromonetrails and heuristic information. At each step of construction ofthe solution, ant k selects the next node using a probabilisticaction selection rule, which dictates the probability with whichant k will choose to go from current node i to next node j:
pkij(t) =
[τij(t)]αant [ηij ]βant∑l∈Ni
[τil(t)]αant [ηil]βant(1)
where Ni is the set of links l available at decision node i,pk
ij(t), is the probability of selecting a link between nodes iand j for the kth ant, τij is the pheromone on link between iand j, and ηij is the heuristic value of link between i and j.αant and βant represent the influence of pheromone contentand heuristic respectively.
978-1-4244-2705-5/08/$25.00 c©2008 IEEE
![Page 2: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/2.jpg)
After each iteration t of the algorithm (that is, when all antshave completed a solution) trails are updated using
τij(t) = �.τij(t − 1) + Δτij (2)
where � is a user-defined evaporation/forgetting constant, andΔτij represents the sum of the contributions of all antsthat used move ‘ij’ to construct their solution. The ants’contributions are proportional to the quality of the achievedsolutions. That is, the better the solution generated by an ant,the higher the trail contribution added to the moves it used.
III. MULTI-OBJECTIVE OPTIMIZATION
In multi-objective decision-making problems, a possiblecompromise between several conflicting objectives needs to befound by evaluating these objectives [4]. Many multi-objectiveoptimization problems are also constrained. Therefore, anyoptimization technique applied to solve these problems mustensure that all constraints are satisfied by the set of opti-mum solutions [11]. Multi-objective optimization problems areusually solved by scalarization (also referred to as weightedaggregation), where the problem is converted into a single or afamily of single objective problems, which is then solved usingsingle objective optimizers. Mathematically, a MOO problemcan be stated as follows:
Optimize : F(x) = (f1(x), f2(x), · · · , fK(x)) (3)subject to gm(x) ≤ 0, m = 1, · · · , n
hm(x)=0, m = n + 1,· · · , n + nh
where x ∈ S, and there are at least two (i.e. K ≥ 2)conflicting objective functions fK that need to be optimizedsimultaneously. Here x = (x1, x2, ..., xD) is called the vectorof decision variables, S is defined as the feasible region,{gm(x)} is the set of inequality constraints, and {hm(x)}is the set of equality constraints. Due to the contradictionof objectives, there does not exist a single solution thatwould optimize all the objectives simultaneously. In multi-objective optimization, vectors are regarded as optimal if theircomponents cannot be improved without deterioration of anyone of the other components [4]. This is usually referredto as Pareto optimality. Presence of multiple objectives inan optimization problem usually gives rise to a set of opti-mal solutions, commonly known as Pareto-optimal solutions.Mathematically, the MOO problem is considered to be solvedwhen a Pareto optimal set is found.
A. Fuzzy Logic and MOO
Several methods for handling the multi-objective aspectsby finding a Pareto set of solutions have been reported inliterature [4] [12]. In recent years, fuzzy logic has also receivednotable attention for MOO problems, with applications invarious areas, such as analog circuit design [13], war resourceallocation [14], direct current electromagnet design [15], andfacility location selection [16].
The theory of fuzzy logic [17] [18] is based on a multi-valued logic wherein a statement could be partly true and
partly false at the same time. A fuzzy logic approach differsfrom binary logic, in that binary logic allows a statement to beeither false or true. The binary logic approach mathematicallymaps to a crisp set X , where each element x ∈ X can eitherbelong to a set or not. In contrast to binary logic, fuzzy logicestablishes an approximate truth value of a proposition basedon linguistic variables and inference rules. Thus, in fuzzy sets,an element may partially belong to a set. This partial belongingis expressed by a membership function, μ, in the range [0,1],where μ is used to determine degree of membership to thefuzzy set. A linguistic variable is a variable whose valuesare words or sentences in natural or artificial language [17].An expert can form rules with linguistic variables, by usinghedges, e.g. ‘more’, ‘many’, ‘few’, and connectors such asAND, OR, and NOT. These rules will be used by an inferenceengine to facilitate approximate reasoning.
Like crisp sets, set operations such as intersection, union,and the complement, are also defined on fuzzy sets. Zadeh [19]first suggested to implement the ‘AND’ and the ‘OR’ as ‘min’and ‘max’ operations. However, in certain multi-objectiveapplications, Zadeh’s ‘AND’ and ‘OR’ operators appearedto be quite rigid [20]. Over the years, many refinementshave been proposed to Zadeh’s operators. Some of theserefinements resulted as probability operators [20], boundedoperators [20], Einstein’s operators [20], Hamacher’s operators[21], Yager’s ordered weighted average (OWA) operator [22],and the unified AND-OR (UAO) operator [23].
The OWA operator has been applied to a number of MOOproblems [24]- [28]. The logic behind developing OWA wasthat MOO problems generally have two extreme approachesin creating a single objective function from sub-objectivefunctions. In the first case, all objectives are required to besatisfied, which leads to the pure-ANDing operation. At theother extreme, any of the objectives can be satisfied, thussuggesting the pure-ORing operation. However, for many real-world problems, it is not desirable to formulate multi-objectivedecision functions with pure “ANDing” of t-norm operatorsnor the pure “ORing” of s-norm operators. The reason forthis is the complete lack of compensation of t-norm operatorsfor any partial fulfillment and complete submission of s-normoperators to fulfillment of any sub-objective. This observationled to the development of the Ordered Weighted Averaging(OWA) operator by Yager [22].
The UAO operator [23] is a slight modification of the OWAoperator. The main difference between the two operators isthat the OWA has two separate equations to represent the ANDand the OR functions. However, UAO uses a single equation,yet the operator is capable of behaving either as the OWA-AND or the OWA-OR operator. The behavior is controlled bya variable ν ≥ 0, whose value decides whether the functionwill behave as AND or OR. The operator is defined as
f(a, b) =ab + ν max{a, b}ν + max{a, b} =
{I� = μA∪B(x) if ν > 1I∗ = μA∩B(x) if ν < 1 (4)
where a represents the membership value of μA (i.e. a = μA),b represents the membership value of μB (i.e. b = μB), andf(a, b) represents the value of the overall objective function
![Page 3: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/3.jpg)
(i.e. f(a, b) = μAB). I∗ represents the AND operation usingthe UAO operator, and I� denotes the OR operation usingthe UAO operator. For further details of the UAO operator,interested reader is referred to Khan et al. [23].
IV. DLAN TOPOLOGY DESIGN PROBLEM
The DLAN topology design problem requires finding aquality feasible tree topology under a given set of designobjectives and constraints. This tree topology will interconnectall nodes (LANs) in the network, thus forming a backbonetopology of a DLAN. The term “feasible topology” refers toa solution that satisfies all design principles and constraints.The term “quality topology” refers to a solution that optimizesthe design objectives. In this paper, the quality of a topologyis evaluated based on four design objectives: monetary cost,average network delay per packet (network latency), maximumnumber of hops between any source-destination pair, and net-work reliability. The search targets feasible topologies whichminimizes cost, average network delay, and maximum hops,while maximizing network reliability. In fuzzy logic, the aboverequirements can be combined using the following fuzzy rule:
IF a solution X has low cost AND low delay AND lowhops AND high reliability THEN it is a good topology.
The expressions “low cost”, “low delay”, “low hops”, “highreliability”, and “good topology” are linguistic values, eachdefining a fuzzy subset of solutions. For example, “high reli-ability” is the fuzzy subset of topologies of high reliabilities.Each fuzzy subset is defined by a membership function, μ.The membership function returns a value in the interval [0,1]which describes the degree of satisfaction with the particularobjective criterion. Using the UAO operator, the above fuzzyrule can be mathematically represented as
μ(x)I� =∏4
i=1 μi(x) + ν max{μ1(x), μ2(x), μ3(x), μ4(x)}ν + max{μ1(x), μ2(x), μ3(x), μ4(x)}
(5)In Equation (5), μ(x)I� represents the membership value
of solution x in the fuzzy set good topology using theUAO operator. Moreover, μi for i = {1,2,3,4} represents themembership values of solution x in the fuzzy sets low cost,low delay, low hops, and high reliability respectively. Thesolution which results in the maximum value for Equation(5) is reported as the best solution found. However, it is alsopossible to get a set of best solutions having equal membershipvalues (i.e. Pareto optimal solutions), in which case any oneof such solutions is taken as the best solution. As an example,consider μ1 = 0.5, μ2 = 0.7, μ3 = 0.85, and μ4 = 0.2. Alsoassume that ν = 0.5. Then, the resulting membership usingthe UAO operator would be μ(x)I� = 0.374. Of course, therewould be many other solutions where the membership valuesfor individual objectives would be different, but the overallmembership would be the same as obtained above. This wouldresult in Pareto set of solutions, and any of the Pareto solutionscould be chosen.
A detailed description on computation of objective values,constraints, and formation of membership functions for indi-vidual objectives can be found in [23] [29].
V. FUZZY ANT COLONY OPTIMIZATION OF DLANTOPOLOGY DESIGN
The ACO maintains a population of ants, where each ant isresponsible for building a feasible network topology. The antstarts with the root node and incrementally builds a topology.The guiding factors in the process of decision and selection ofa particular path are the heuristic value, pheromone trail, andevaporation. A complete tour by an ant results in a completefeasible network topology. Below, each step of the proposedfuzzy ACO is presented.
A. Initialization
Since ACO is a population based algorithm, initializationconsists of generating a set of solutions. These initial solu-tions are generated randomly. That is, each ant produces asolution without any feedback or previous information aboutthe paths. However, while an ant is generating a solution, theconstraints are checked at each step to ensure feasible initialsolutions. Algorithm parameters such as pheromone depositand evaporation rates, as well as values of αant and βant arealso initialized in this phase.
B. Ants Activity
Once the initial set of solutions is generated, the next stepis to find the probability of selecting link l between nodes iand j for the kth ant, and to apply pheromone deposit andpheromone evaporation rules. The approach adopted in thiswork is to update pheromone values based on the solutiongenerated by the “elitist” ant only. Several variations of theelitist ant approach have been reported in literature [30]-[33]. The approach adopted in this paper is as follows. Inevery iteration following initialization, each ant constructs asolution using the link selection probability function given inEquation (1). Once each ant has finished its tour and found avalid solution, the ant which generates the highest value forEquation (5) is taken as the elitist ant. This ant is allowed toupdate the pheromone value. For each link that occurs in thesolution of the elitist ant, pheromone is updated by addingΔτij to the current pheromone concentration of that link.Pheromone evaporation takes place on all links, irrespective ofwhether the links are part of the elitist ant or not. The updatedvalues of pheromone are then passed to following ants, and theabove cycle is repeated until a predefined stopping conditionis met.
The prime advantage of the above elitist ant approach isthat the approach forces the ants to search more rigorouslynear the best solution that has been found so far. However,the approach can have a disadvantage of exploiting too much,and exploring less.
C. Fuzzy Heuristic Value
A fuzzy heuristic value is incorporated in Equation (1).The heuristic value ηij basically provides an insight into thestructure of the individual elements of the solution. In thecontext of DLAN topology design, each element is a link
![Page 4: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/4.jpg)
between any two nodes i and j. The heuristic value of a linkis calculated as given by the following rule:
IF a link is near optimum cost AND near optimum depthAND near optimum reliability THEN it has high heuristicvalue.
The above rule can be represented mathematically usingOWA operator as follows:
ηij = βe× min{μ1(li), μ2(li), μ3(li)}+(1−βe)×13
3∑i=1
μi(li)
(6)In Equation (6), ηij is the fuzzy set of high heuristic value
and βe is a constant in the range [0,1]. μ1(li), μ2(li), andμ3(li) respectively represent memberships in the fuzzy setsnear optimum monetary cost, near optimum depth, and nearoptimum reliability respectively.
The membership of a link with respect to near optimummonetary cost is determined as follows. From the cost matrix,which gives the costs of each possible link, the minimum andmaximum costs among all the link costs are found. Theseminimum and maximum costs are taken as the lower (LCMin)and upper (LCMax) bounds. Then, the membership of a linkis calculated with respect to these bounds using the followingequation
μ1(li) =
⎧⎨⎩
1 if LC ≤ LCMinLCMax−LC
LCMax−LCMin if LCMin < LC ≤ LCMax
0 if LC > LCMax(7)
where “LC” represents the current cost of the link. Themembership function of near optimum depth, μ2, can bedefined in a similar way. The lower limit, “LDMin”, is takento be a depth of 1 with respect to the root. The upper limit,“LDMax”, is taken to be the maximum depth generated in theinitial solution or a maximum of a user specified limit. 1 Themembership function for near optimum depth is representedby
μ2(li) =
⎧⎨⎩
1 if LD ≤ LDMinLDMax−LD
LDMax−LDMin if LDMin < LD ≤ LDMax
0 if LD > LDMax(8)
where “LD” represents the current depth of the link withrespect to the root node. Finally, the membership functionfor reliability, μ3, can be determined by finding the maximum(LRMax) and the minimum (LRMin) bounds for the reliability.The membership value for reliability is determined as
1This user specified limit may be a design constraint. e.g., if each hoprepresents a router that uses the routing information protocol (RIP) in whichcase a reasonable limit would be 7. That is, a branch of the tree should nothave more than 7 routers.
TABLE INETWORK CHARACTERISTICS ASSUMED FOR EXPERIMENTS
Parameter Characteristic
Cost of fiber optic cable $ 5 per meterDelay per bit due to networking device 250µsec.
Maximum traffic on a link allowed 60Average packet size 500 bytes
Type of networking device Router, switch, or hubNumber of ports on a networking device 4, 8, or 12
μ3(li) =
⎧⎨⎩
1 if LR ≥ LRMaxLRMax−LR
LRMax−LRMin if LRMin < LR ≤ LRMax
0 if LR < LRMin(9)
where “LR” represents the current reliability of the link.
VI. RESULTS AND DISCUSSION
The fuzzy ACO was applied to five test cases. For these testcases, the number of local sites ranged between 15 (denotedby n15) and 50 (denoted by n50). Traffic generated by eachlocal site for these test cases was collected from real sites,and costs of the network cables were collected from vendors.Other characteristics, such as the number of ports on a networkdevice, its type, etc. are listed in Table I.
TABLE IIPARAMETER SETTINGS FOR FUZZY ACO USED IN EXPERIMENTS. DEP =DIFFERENCE BETWEEN PHEROMONE DEPOSIT AND EVAPORATION RATES.
Parameter set Pheromone rates DEPDeposit Evaporation
Set 1 0.2 0.0 0.2Set 2 0.4 0.1 0.3Set 3 0.6 0.2 0.4Set 4 0.8 0.3 0.5
To give equal importance to pheromone level on a linkand the heuristic value of the link, both αant and βant weretaken as 0.5. The main focus of the experiments was to studythe effect of the population size of ants and the effect ofpheromone deposit and evaporation on the quality of solutions.Table II shows the combinations of pheromone deposit andevaporation rates used in the experiments. Population size wastaken as 10, 15, 20, 25, and 30 ants. The process for findingminimum and maximum limits of link cost and link depth havealready been explained in Section V-C. For link reliability, fivevalues were used. These values were 0.99, 0.95, 0.9, 0.85, and0.8, as used by Altiparmak et al. [34] in a similar study. ThusLRMin = 0.8 and LRMax = 0.99. 30 runs were made foreach parameter setup, and the average of best solutions foundin each run was reported, with the standard deviation. Eachtest instance was run for 100 iterations.
A. Effect of Pheromone Deposit and Evaporation
An objective of the work was to study the effect ofpheromone deposit and evaporation. In the original ACO
![Page 5: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/5.jpg)
algorithm, the trail is updated proportional to the quality ofsolution as given in Equation (2). This does not provideenough insight into the effect of high and low pheromone de-posit and evaporation rates. Therefore, pheromone deposit andevaporation were statically assigned to links. The parametersin Table II were used to study the effect of pheromone depositand evaporation. These parameters depict different rates ofpheromone deposit and evaporation, as given in columns 2and 3 respectively. Column 4 of the table depicts the differencebetween the pheromone deposit and evaporation rate, denotedby DEP. Note that in Table II, the gap between pheromonedeposit and evaporation rates (i.e. DEP) increases with eachset. For example, in Set 1, the difference between deposit andevaporation was 0.2. DEP gradually increased in each set andreached a maximum of 0.5 in Set 4. Experiments were doneusing 20 ants.
TABLE IIIRESULTS FOR MAXIMUM AND MINIMUM AVERAGE OVERALL GOODNESS
AND THEIR RESPECTIVE PHEROMONE DEPOSIT AND EVAPORATION RATE
SETUP USING UAO. MAX GOOD AND MIN GOOD RESPECTIVELY
REPRESENT MAXIMUM AND MINIMUM OVERALL AVERAGE GOODNESS.%IM REPRESENTS PERCENTAGE IMPROVEMENT. ONE-WAY ANOVA WAS
PERFORMED WITH F0.01,1,58 = 7.093
Case Max Results Min Results %ImDEP Max Good DEP Min Good
n15 0.5 0.333 ±0.000 0.2 0.312 ±0.009 6.21n25 0.3 0.360 ±0.009 0.2 0.289 ±0.004 19.81n33 0.5 0.347 ±0.004 0.2 0.268 ±0.007 22.75n40 0.4 0.346 ±0.006 0.2 0.290 ±0.003 16.30n50 0.4 0.334 ±0.002 0.2 0.264 ±0.006 20.93
TABLE IVRESULTS FOR UAO FOR DIFFERENT POPULATION SIZE, PHEROMONE
DEPOSIT RATE, AND EVAPORATION RATE. GOODNESS = AVERAGE
OVERALL GOODNESS WITH STANDARD DEVIATION
Case Ants DEP Goodnessn15 30 0.5 0.334 ±0.002n25 30 0.3 0.363 ±0.008n33 25 0.5 0.349 ±0.006n40 30 0.4 0.352 ±0.006n50 30 0.4 0.336 ±0.004
Table III depicts the maximum and minimum overall good-ness achieved using UAO. Column 1 of this table showsthe five test cases. Column 3 shows the maximum overallgoodness obtained for each test case, while column 2 showsthe associated DEP. Similarly, column 5 shows the minimumoverall goodness, with column 4 showing the DEP associatedwith the minimum overall goodness. The last column of thetable depicts the percentage improvement (denoted by % Im)obtained when the maximum overall goodness was comparedwith the minimum overall goodness. As an example, considerthe case of n33, where the overall goodness of 0.347 wasobtained with DEP = 0.5 (i.e. deposit = 0.8 and evaporation= 0.3), while for DEP = 0.2 (representing deposit = 0.2,and evaporation = 0.0), the overall goodness was 0.268.This resulted in improvement of 22.75% which was achievedwhen the gap between deposit and evaporation was high. As
obvious from the table, a noticeable improvement of over15% was achieved for almost all cases. An exception was inthe case of n15, where a slight improvement of 6.21% wasobserved. A general trend obvious in this table is that forall test cases, the minimum overall goodness was obtainedwhen the difference between the deposit and evaporation wasthe lowest (i.e. deposit = 0.2, evaporation = 0.0). One wayANOVA was also performed to statistically validate the resultsby testing the hypothesis whether the best and worst resultswere significantly different from each other. The ANOVAresults were obtained at 1% significance level, with 2 levelsof treatments. The outcome of ANOVA suggested that thedifference between the maximum and minimum goodness wasstatistically significant for all test cases, with the exception ofn15.
The results and observations presented in Table III can beattributed to the following explanation. When the pheromonedeposit rate is low, and no evaporation takes place (a situationassociated with DEP = 0.2), then the pheromone contentson links present in the elitist ant are not much differentthan the pheromone contents on links not present in theelitist ant. Consequently, there will be a little differencebetween the probabilities, pk
ij(t), which makes selection oflinks more random. In general, this situation would persist astime elapses. There might be very few links which would haveaccumulated a noticeable amount of pheromone, and thereforewould be selected again and again. On the other hand, if thepheromone deposit rate is high, and pheromone evaporationalso takes place on links (a situation associated with DEP =0.3, 0.4, and 0.5), then the amount of pheromone depositedon links in the elitist ant will be substantially higher thanthe pheromone on links not present in the elitist ant. Thus,there will be a significant difference between the probabilities,pk
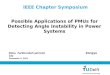
ij(t). Therefore, links with high pheromone content wouldbecome strong candidates for selection, resulting in the searchto be more directional. Therefore, for the same amount of time,FACO will converge faster towards a sub-optimal solutions forsituations where DEP is high as compared to instances whereDEP is low. The above claim is supported by plots in Figure(1). This figure shows a typical behavior of FACO with DEP= 0.2 and DEP = 0.5 for test case n50. It is observed in thisfigure that with DEP = 0.5, the improvement in the overallgoodness is much higher than that obtained with DEP = 0.2for the same number of iterations.
B. Effect of Number of Ants
As mentioned earlier, the number of ants was varied from 10to 30. Table IV shows the best overall goodness of the solutionusing the UAO operator along with the number of ants. It isclear from the table that the best results were obtained whenthe number of ants was the highest (i.e. 30). There was oneexception of n33 where 25 ants produced the best results.
The above trends appear to be logical. Note that each antis independent in generating its solution, although the elitistant influences the pheromone concentrations on the links ofthe solution represented by the ant. Increasing the number ofants initially enhances diversity in solutions, thus increasing
![Page 6: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/6.jpg)
TABLE VCOMPARISON OF FACO AND FSA. DEP = DIFFERENCE IN PHEROMONE DEPOSIT AND EVAPORATION RATE. EXECUTION TIME IS IN SECONDS. % IMP
REFERS TO PERCENTAGE IMPROVEMENT. ONE-WAY ANOVA WAS PERFORMED WITH F0.01,1,58 = 7.093.
Case FACO FSA % ImpAnts DEP Overall Exec. time α Overall Exec. time
goodness goodnessn15 30 0.5 0.334 ±0.002 31.33 0.99 0.335 ±0.003 83.00 0.298n25 30 0.3 0.363 ±0.008 68.53 0.75 0.345 ±0.034 256.30 2.029n33 25 0.5 0.349 ±0.006 128.13 0.75 0.339 ±0.092 786.57 2.950n40 30 0.4 0.352 ±0.006 1261.87 0.85 0.374 ±0.068 1192.47 -2.941n50 30 0.4 0.336 ±0.004 6478.83 0.85 0.350 ±0.053 2634.33 -4.571
Effect of different pheromone deposit and evaporation rate on overall goodness
0.220.240.260.280.3
0.320.340.36
1 20 40 60 80 100
Iterations
Ove
rall
Goo
dnes
s
DEP = 0.2
DEP = 0.5
Fig. 1. Plot for overall goodness for test case n50 using FACO with DEP =0.2 and DEP = 0.5
the probability of finding a new elite ant of better quality. Thisin turn allows the elitist ant to pass information of links havinghigher quality to ants in the next iteration.
C. Comparison with Fuzzy Simulated Annealing Algorithm
The proposed FACO was compared with a fuzzy simulatedannealing (FSA) algorithm adapted for the DLAN topologydesign problem [29]. Simulated annealing (SA) is a well-known optimization algorithm and has been successfully ap-plied to a number of complex optimization problems. In FSAfor DLAN topology design problem, the four design objectivesare aggregated using the same approach as described inSection IV. However, the main difference between FACO andFSA is that in FACO, a number of solutions are constructed ineach iteration, while in FSA, a single solution is maintainedand perturbed during the execution of the algorithm.
FSA has two main steps: initialization and the metropolisprocedure. During initialization, a feasible solution is gener-ated randomly. This solution is then passed to the metropolisprocedure which perturbs the solution. If the overall goodnessof the new solution (i.e., perturbed solution) is higher thanthat of the current solution, then the new solution is definitelyaccepted. If the overall goodness of the new solution is lessthan the overall goodness of the current solution, then the newsolution is accepted probabilistically based on the metropoliscriterion given by the probability P (random < e−Δh/T ),
where random is a random number in the range 0 to 1, Δhrepresents the difference in the overall goodness of currentsolution and new solution, and T represents the annealingtemperature. However, if any of the constraints are violated,or if the new solution does not pass the metropolis criterion,then the new solution is not accepted and the current solutionis restored.
FSA has a number of control parameters which have animpact on the performance of the algorithm. These parametersinclude the initial temperature, T0, the cooling rate, αSA,the constant, βSA, and the length of markov chain, M ,which represents the time until the next parameter update.Inappropriate values for these parameters may result in non-optimal solutions. For the purposes of this paper, the followingparameter values were used: the initial temperature was set atT0 = 1000. For the cooling rate, α, values of 0.6, 0.75, 0.85,0.95, and 0.99 were considered. The length of the markovchain was set at M =10. The annealing constant was set at β= 1.1. For a detailed description and results of FSA, refer toKhan et al. [29].
Table V summarizes the results of FACO and FSA. Thetable shows results for the best parameter combination forFACO, which is exactly the same as given in Table IV. ForFSA, the best results along with the corresponding coolingrate α are also given in the table. It is observed from TableV that the average goodness found by the two algorithms areapproximately the same for all test cases. FACO had a veryslight improvement for test cases n15, n25, and n33, and had aslight deterioration for n40 and n50. A one-way ANOVA wasalso performed to statistically validate the results by testingthe hypothesis whether the two averages were significantlydifferent from each other. The ANOVA results were obtainedat 1% significance level, with 2 levels of treatments. Theoutcome of ANOVA suggested that the results produced byFACO and FSA did not have a significant difference in termsof the quality of solutions produced by the two algorithms.Table V also lists the execution time (average of 30 runs) forFSA and FACO, where it is observed that the execution timefor FACO for cases n15, n25, and n33 was quite less thanthat of FSA. For n40, FACO had slightly higher executiontime than FSA, while for n50, FACO had significantly higherexecution time than FSA. Thus, the general observation is that,as far as computational time is concerned, FACO had muchbetter performance than FSA for small and medium size test
![Page 7: [IEEE 2008 IEEE Swarm Intelligence Symposium (SIS) - St. Louis, MO, USA (2008.09.21-2008.09.23)] 2008 IEEE Swarm Intelligence Symposium - A fuzzy ant colony optimization algorithm](https://reader036.pdfslide.us/reader036/viewer/2022082509/575095b61a28abbf6bc42fbd/html5/thumbnails/7.jpg)
cases, but for bigger cases, FSA showed lesser execution timethan FACO.
VII. CONCLUSION
This paper presented an approach for topology design ofdistributed local area networks based on a multi-objectiveant colony optimization algorithm. The multi-objective aspectswere addressed by incorporating fuzzy logic in the algorithm.The performance of the fuzzy ACO was evaluated with respectto different algorithm parameters. A comparison with fuzzysimulated annealing algorithm showed that the fuzzy ACOproduced solutions of the same quality as that of fuzzysimulated annealing.
REFERENCES
[1] M. Dorigo, M. Maniezzo, and A. Colorni. The Ant Systems: AnAutocatalytic Optimizing Process. Technical Report 91-016, MilanPolytechnic, 1991.
[2] M. Dorigo and T. Stutzle. The Ant Colony Optimization Metaheuris-tic. D. Corne and M. Dorigo and F. Glover, Editors, New Ideas inOptimization, McGraw-Hill, pp. 11-32, 1999.
[3] E. Bonabeau, M. Dorigo, and G. Thraulaz. From Natural to ArtificialSwarm Intelligence. Oxford University Press, 1999.
[4] K. Miettinen. Some Methods for Nonlinear Multi-objective Optimiza-tion. In First International Conference on Evolutionary Multi-CriterionOptimization, LNCS, Springer, pages 1 – 20, 2001.
[5] J. Li and W. Zhang. Solution to Multi-objective Optimization of FlowShop Problem Based on ACO Algorithm. In International Conferenceon Computational Intelligence and Security, pages 417–420, 2006.
[6] K. Doerner, W. Gutjahr, R. Hartl, C. Strauss, and C. Stummer. AntColony Optimization in Multiobjective Portfolio Selection. In 4thInternational Conference on Metaheuristics, pages 125–131, 2001.
[7] B. Sarif, M. Abd-El-Barr, S. Sait, and U. Al-Saiari. Fuzzified Ant ColonyOptimization Algorithm for Efficient Combinational Circuits Synthesis.In IEEE Congress on Evolutionary Computation, pages 1317 – 1324,2004.
[8] D. Angus. Crowding Population-based Ant Colony Optimization forthe Multi-objective Travelling Salesman Problem. In IEEE Symposiumon Computational Intelligence in Multicriteria Decision Making, pages333–340, 2007.
[9] S. Kirkpatrick, C. Gelatt Jr., and M.Vecchi. Optimization by SimulatedAnnealing. Science, pages 498–516, May 1983.
[10] R. Kling and P. Banerjee. Empirical and Theoretical Studies of theSimulated Evolution Method Applied to Standard Cell Placement. IEEETransactions on Computer-Aided Design, 10(10):1303–1315, October1991.
[11] J. Wright and H. Loosemore. An Infeasibility Objective for Use inConstrained Pareto Optimization. In First International Conference onEvolutionary Multi-Criterion Optimization, LNCS, Springer, pages 256–268, 2001.
[12] C. A. Coello Coello. A Comprehensive Survey of Evolutionary-BasedMultiobjective Optimization Techniques. Knowledge and InformationSystems, 1(3):269 – 308, 1999.
[13] G. Oltean, C Miron, and E. Moccan. Multiobjective Optimization forAnalog Circuits Design based on Fuzzy Logic. In 9th InternationalConference on Electronics, Circuits and Systems, pages 777 – 780, 2002.
[14] S. Palaniappan, S. Zein-Sabatto, and A. Sekmen. Dynamic Multiobjec-tive Optimization of War Resource Allocation using Adaptive GeneticAlgorithms. In IEEE SoutheastCon, pages 160 – 165, 2001.
[15] M. Chiampi, C. Ragusa, and M. Repetto. Fuzzy Approach for Multi-objective Optimization in Magnetics. IEEE Transactions on Magnetics,32(3):1234 – 1237, 1996.
[16] C. Kahraman, D. Ruan, and I. Doan. Fuzzy Group Decision-making forFacility Location Selection. Information Sciences, 157:135–153, 2003.
[17] L. A. Zadeh. Fuzzy Sets. Information Contr., 8:338–353, 1965.[18] L. A. Zadeh. The concept of a linguistic variable and its application to
approximate reasoning. Information Sciences, 8:199–249, 1975.[19] L. Zadeh. Optimality and Non-Scalar-Valued Performance Criteria.
IEEE Transactions on Automatic Control, 8:59 – 60, 1963.[20] H. Li and V. Yen. Fuzzy Sets and Fuzzy Decision-Making. CRC Press,
1995.
[21] H. Hamacher. Ueber logische Verknupfungen Unschalfer Aussagen undderen Zugehoerige Bewertungs-funktione. Progress in Cybernetics andSystems Research, 3:276–288, 1978.
[22] Ronald Y. Yager. On Ordered Weighted Averaging Aggregation Oper-ators in Multicriteria Decision-making. IEEE Transactions on Systems,Man, and Cybernetics, 18(1):183–190, Jan 1988.
[23] Salman A. Khan and Andries P. Engelbrecht. A new fuzzy operatorand its application to topology design of distributed local area networks.Information Sciences, 177(12):2692–2711, 2007.
[24] G. Bordogna, M. Fedrizzi, and G. Pasi. A Linguistic Modelling ofConsensus in Group Decision Making based on OWA Operators. IEEETransactions on Systems, Man and Cybernetics, Part A, 27(1):126–133,January 1997.
[25] T. Murata, H. Oshida, and M. Gen. Rule-based Weight Definition forMulti-objective Fuzzy Scheduling with the OWA Operator. In 26thAnnual Conference of the Industrial Electronics Society, pages 2756 –2761, 2000.
[26] S. Sait, M. Ali, and A. Zaidi. Multiobjective VLSI Cell Placementusing Distributed Simulated Evolution Algorithm. In IEEE InternationalSymposium on Circuits and Systems, Kobe, Japan, pages 6226–6229,May 2005.
[27] S. Sait, M. Faheemuddin, M. Minhas, and S. Sanaullah. MultiobjectiveVLSI Cell Placement Using Distributed Genetic Algorithm. In Geneticand Evolutionary Computation Conference, Washington DC, USA, pages1585 – 1586, 2005.
[28] V. Torra. Weighted OWA Operators for Synthesis of Information. InFifth IEEE International Conference on Fuzzy Systems, pages 966 – 971,1996.
[29] Salman A. Khan and Andries P. Engelbrecht. Fuzzy Hybrid SimulatedAnnealing Algorithms for Topology Design of Switched Local AreaNetworks. Soft Computing, Springer-Verlag, 2008.
[30] M. Dorigo, V. Maniezzo, and A. Colorni. The Ant System: Optimizationby a Colony of Cooperating Agents. IEEE Transactions on Systems,Man, and Cybernetics Part B, 26:29–42, 1996.
[31] D. Merkle, M. Middendorf, and H. Schmeck. Ant Colony Optimizationfor Resource-Constrained Project Scheduling. IEEE Transactions onEvolutionary Computation, 6(4):333 – 346, 2002.
[32] J. Gu, Q. Tan, N. Li, J. Zhang, and N. Mao. A New ACO with ImmuneAbility. In Fifth International Conference on Machine Learning andCybernetics, pages 4278 – 4281, 2006.
[33] D. Angus. The Current State of Ant Colony Optimization Applied toDynamic Problems. Technical Report TR 009, University of Melbourne,Australia, 2006.
[34] B. Dengiz, F. Altiparmak, and A. Smith. Local Search GeneticAlgorithm for Optimal Design of Reliable Network. IEEE Transactionson Evolutionary Computation, pages 179–188, September 1997.