Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 9th International Workshop on Discrete Event Systems - Goteborg, Sweden (2008.05.28-2008.05.30)] 2008 9th International Workshop on Discrete Event Systems - Performance](https://reader040.pdfslide.us/reader040/viewer/2022030222/5750a4cd1a28abcf0cad2353/html5/page/1.jpg)
Performance Analysis of Linear Systems over Semiring with AdditiveInputs
Laurent Hardouin, Bertrand Cottenceau, Sebastien Lagrange, Euriell Le Corronc
Abstract— This paper deals with the computation of amaximal flow in single input single output (max, +) linearsystems. Assuming known a system composed of some sub-systems - each one being described by a transfer function-and some secondary inputs interfering with the principal flowon consecutive sub-systems, the computation of a maximalprincipal output is addressed. Transfer functions, inputs andoutputs are represented by periodical series in a semiring offormal series, namely NminJδK. Previously, it is shown thatthe Hadamard product of such series allows to compute theaddition of inputs, and that this product is both residuatedand dually residuated. These properties are used to computethe maximal principal output. An example concludes the paperand allows to illustrate the efficiency of the proposed approach.
Keywords: Discrete Event Systems, Timed Event Graphs,(max, +) algebra, Residuation Theory.
I. INTRODUCTION
Timed event graphs are Timed Petri Nets of which eachplace has one and only one upstream transition and one andonly one downstream transition. TEGs enable to depict sys-tems characterized by synchronization and delay phenomenain a graphical way. These phenomena are often found inmanufacturing systems such as assembly lines, but also intransportation networks subject to connection and in com-puter networks. TEG behavior can be modelled by a dynamiclinear model in the (max, +) semiring, by associating foreach transition labelled xi a ”dater” function xi(k) whichrepresents the k-th firing date of this transition. Dually it ispossible to consider a counter function xi(t) which depictsthe number of firing occurred up to time t and then toobtain a dynamic linear model in the (min, +) semiring. Themethodology to build these models is exhaustively proposedin [2].
These mathematical models are used for the performanceevaluation of manufacturing systems, transportation networks[12] and computer networks [14]. For these linear systems acontrol theory has been constructed in an analogous wayto the control theory for classical linear systems. Non-exhaustively, we can cite the identification methods [4], [21],[17] and, among the control structures, the model predictivecontrol [22], the optimal control [6][19], and the closed loopcontrol [16], [7], [15], [11]. Some graph algorithms for boththe shortest path problem and for the maximum flow problemcan also be depicted in these particular semirings (see [9]).
This paper deals with the maximal output computation ina system composed of some sub-systems in which secondaryinputs interfere in an additive way. These results are basedon the Hadamard product of series, which is both residuatedand dually residuated.
Section II recalls useful algebraic tools. In particular, itgives necessary and sufficient conditions for a monotonicmapping f to be residuated.
Section III presents some semirings of formal power seriesand their Hadamard product. It is shown that this product isresiduated and dually residuated if the co-domain is restrictedto a given subset. Section IV briefly recalls how to model aTEG in a semiring, and the set of input series which leads tothe lowest output of the system is given. This output, calledimpulse response, corresponds to the maximal instantaneousnumber of tokens which can be put out of the correspond-ing TEG. A discussion about practical computation of theresiduals of the Hadamard product concludes the section.
Section V is devoted to the performance analysis of a sin-gle input single output (SISO) system subject to interferinginputs which act in an additive way. These inputs are notdisturbances in the sense of the one studied in [15], butflows added to the system. This means that the system is nolonger a TEG because some places have more than one inputtransition and others have more than one output transition.Nevertheless, assuming known these additive inputs, thelowest system output achievable and the greatest systeminput leading to this output are computed. An illustrativeexample concludes the paper.
II. ALGEBRAIC PRELIMINIARIES
This section aims at recalling some algebraic propertiesof idempotent semirings and to present some semirings offormal series used afterwards.
Definition 1 (Idempotent Semiring): An idempotentsemiring is a set S endowed with two inner operationsdenoted ⊕ and ⊗. The sum is associative, commutative,idempotent (i.e. ∀a ∈ S, a ⊕ a = a) and admits a neutralelement denoted ε. The product is associative, distributesover the sum and admits a neutral element denoted e. Theelement ε is absorbing for the product. When product ⊗ iscommutative, the semiring is said to be commutative. As inthe classical algebra, symbol ⊗ is often omitted.
Definition 2 (Order Relation): An order relation can beassociated with S by the following equivalence:∀a, b ∈ S, a º b ⇐⇒ a = a⊕ b. Therefore, ε is the bottomelement of S .
Definition 3 (Complete Idempotent Semiring): SemiringS is complete if it is closed for infinite sums and if theproduct distributes over infinite sums too. In particularT =
⊕x∈S x is the greatest element of S (T is called
the top element of S). The greatest lower bound of everysubset C of a complete semiring S always exists, and a ∧ b
Proceedings of the 9th InternationalWorkshop on Discrete Event SystemsGöteborg, Sweden, May 28-30, 2008
WeM2.3
978-1-4244-2593-8/08/$25.00 ©2008 IEEE 43
![Page 2: [IEEE 2008 9th International Workshop on Discrete Event Systems - Goteborg, Sweden (2008.05.28-2008.05.30)] 2008 9th International Workshop on Discrete Event Systems - Performance](https://reader040.pdfslide.us/reader040/viewer/2022030222/5750a4cd1a28abcf0cad2353/html5/page/2.jpg)
denotes the greatest lower bound between a and b. S is saiddistributive if it is complete and if for all subset C of S ,(∧
x∈C x)⊕ a =∧
x∈C(x⊕ a).Definition 4 (Sub Semiring): A subset C of a semiring S
is called a sub semiring of S if ε ∈ C and e ∈ C and if C isclosed for ⊕ and ⊗.
Example 1 (Zmin,Nmin): Set Zmin = Z ∪ {−∞, +∞},endowed with the min operator as sum and the classical sum(operation +) as product, is a complete idempotent semiring,where ε = +∞, e = 0 and T = −∞. According to definition3, one has 5⊕3 = 3 hence 3 º 5. The order relation of Zmin
is the reversed order of Z. In this particular semiring theproduct distributes over ∧, i.e. , (a∧b)⊗c = (a⊗c)∧(b⊗c).According to definition 4, Nmin = N∪{+∞} endowed withthe same operators is a sub semiring of Zmin, which will bealso considered afterwards.
Theorem 1 ([2] 4.5.3): Over a complete idempotentsemiring S , the implicit equation x = ax⊕b admits x = a∗bas least solution, where a∗ =
⊕i∈N ai (Kleene star operator)
with a0 = e.The residuation theory provides, under some assumptions,
optimal solutions to inequalities such as f(x) ¹ b (resp.f(x) º b), where f is an order-preserving mapping definedover ordered sets. Some theoretical results are recalled below.Complete presentations are given in [3] [2].
Definition 5 (Isotone mapping): A mapping f definedover ordered sets is isotone if a ¹ b ⇒ f(a) ¹ f(b).
Definition 6 (Residuated and dually residuated mappings):Let f : E → F an isotone mapping, where (E ,¹) and(F ,¹) are ordered sets. Mapping f is said residuated if forall y ∈ F , the least upper bound of subset {x ∈ E|f(x) ¹ y}exists and belongs to this subset. It is then denoted f ](y).Mapping f ] is called the residual of f . When f is residuated,f ] is the unique isotone mapping such that
f ◦ f ] ¹ IdF and f ] ◦ f º IdE , (1)
where IdF (respectively IdE ) is the identity mapping on F(respectively on E). Mapping f is said dually residuated if forall y ∈ F , the greatest lower bound of subset {x ∈ E|f(x) ºy} exists and belongs to this subset. It is then denoted f [(y).Mapping f [ is called the dual residual of f . When f is duallyresiduated, f [ is the unique isotone mapping such that
f ◦ f [ º IdF and f [ ◦ f ¹ IdE . (2)
If ∃x ∈ E such that f(x) = y, then f ](y) (respectivelyf [(y)) yields the greatest solution (respectively the lowestsolution).
Theorem 2 ([2]): Let f : E → F where E and F arecomplete idempotent semirings of which bottom (respec-tively top) elements are denoted εE (respectively TE ) and εF(respectively TF ). Mapping f is residuated iff f(εE) = εFand ∀A ⊂ E f(
⊕x∈A x) =
⊕x∈A f(x). And, mapping
f is dually residuated iff f(TE) = TF and ∀A ⊂ Ef(
∧x∈A x) =
∧x∈A f(x).
Corollary 1: Mappings La : x 7→ ax and Ra : x 7→xa defined over a complete idempotent semiring S are both
residuated. Their residuals are usually denoted respectively(La)] : x 7→ a◦\x and (Ra)] : x 7→ x◦/a in (max,+) literature.
Proof: According to definition 3, if S is a completeidempotent semiring then the product distributes over infinitesums and ε is absorbing, therefore the requirements oftheorem 2 are satisfied.
Definition 7 (Restricted mapping): Let f : E → F amapping and A ⊆ E . We will denote f|A : A → F themapping defined by f|A = f◦Id|A where Id|A : A → E , x 7→x is the canonical injection. Identically, let B ⊆ F withImf ⊆ B. Mapping B|f : E → B is defined by f = Id|B◦B|f ,where Id|B : B → F , x 7→ x is the canonical injection.
III. SEMIRING OF POWER SERIES
Definition 8 (Formal power series): A formal power se-ries in p (commutative) variables, denoted z1 to zp, withcoefficients in a semiring S, is a mapping s defined from Zp
or Np in S: ∀k = (k1, ..., kp) ∈ Np or Zp, s(k) representsthe coefficient of zk1
1 ...zkpp and (k1, ..., kp) are the exponents.
Another equivalent representation is
s(z1, ..., z2) =⊕
k∈Zp
s(k)zk11 ...zkp
p .
Definition 9 (Support, degree, valuation): The supportsupp(s) of a series s in p variables is defined as
supp(s) = {k ∈ Zp|s(k) 6= ε}.The degree deg(s) (respectively valuation val(s)) is theupper bound (respectively lower bound) of supp(s).
The set of formal series endowed with the following sumand Cauchy product:
s⊕ s′ : (s⊕ s′)(k) = s(k)⊕ s′(k), (3)
s⊗ s′ : (s⊗ s′)(k) =⊕
i+j=k
s(i)⊗ s′(j), (4)
is a semiring denoted SJz1, ..., zpK. If S is complete,SJz1, ..., zpK is complete. A series with a finite support iscalled a polynomial, and a monomial if there is only oneelement.
The greatest lower bound of series is given by :
s ∧ s′ : (s ∧ s′)(t) = s(t) ∧ s′(t). (5)
A. Semirings ZminJδK and NminJδKThe particular semiring of formal power series with co-
efficients in Zmin and exponents in Z, denoted ZminJδK, isnow considered. A series s ∈ ZminJδK is defined as follows:
s =⊕
t∈Zs(t)δt,
where s(t) ∈ Zmin. The sequence {s(t)}∀t ∈ Z representsa trajectory and series s is called the δ-transform of thistrajectory which is analogous to the z-transform used torepresent discrete-time trajectories in classical system theory.
Usually sequence {s(t)} represents a counter of events ,hence number of events s(t) is greater or equal than s(t−1),i.e. that this is a non decreasing trajectory. According to theorder in Zmin (see example 1), sequence {s(t)} satisfies the
44
![Page 3: [IEEE 2008 9th International Workshop on Discrete Event Systems - Goteborg, Sweden (2008.05.28-2008.05.30)] 2008 9th International Workshop on Discrete Event Systems - Performance](https://reader040.pdfslide.us/reader040/viewer/2022030222/5750a4cd1a28abcf0cad2353/html5/page/3.jpg)
monotonicity property : ∀t, s(t) ¹ s(t − 1) ⇔ s(t − 1) =s(t − 1) ⊕ s(t). Hence, thanks to theorem 1, the followingequivalence holds true
s = s⊕ δ−1s ⇐⇒ s = (δ−1)∗s.
This means that the sequences belong to semiring(δ−1)∗ZminJδK. In this complete semiring ε = (δ−1)∗ ⊗(+∞δ−∞), e = (δ−1)∗ ⊗ (0δ0), and T = (δ−1)∗ ⊗(−∞δ+∞). Afterwards all the series are assumed to be nondecreasing, in order to simplify notations the semiring willbe simply denoted ZminJδK ((δ−1)∗ will be omitted). Dueto the monotonicity property of trajectories, the followingcalculation rules between monomials of ZminJδK come :
nδt ⊕ nδt′ = nδmax(t,t′), (6)nδt ⊕ n′δt = min(n, n′)δt. (7)
Definition 10: The Hadamard product of series ofZminJδK is defined as follows :
s¯ s′ : (s¯ s′)(t) = s(t)⊗ s′(t).
Series s ¯ s′ describes the classical sum of counter since(s ¯ s′)(t) = s(t) + s′(t). The series e¯ = 0δ+∞ is theneutral element of this product, and ε is absorbing for thislaw (s ¯ ε = ε). Afterwards the following mapping will bealso considered
Πa : ZminJδK→ ZminJδK, x 7→ a¯ x.Proposition 1: The Hadamard product of series of
ZminJδK satisfies the following distributivity properties:
(s1 ⊕ s2)¯ s3 = (s1 ¯ s3)⊕ (s2 ¯ s3) (8)
(s1 ∧ s2)¯ s3 = (s1 ¯ s3) ∧ (s2 ¯ s3). (9)Proof: According to definitions 3 and 10, the first
statement leads to
((s1 ⊕ s2)¯ s3)(t) = (s1 ⊕ s2)(t)⊗ s3(t)= (s1(t)⊕ s2(t))⊗ s3(t)= (s1(t)⊗ s3(t))⊕ (s2(t)⊗ s3(t)),
since ⊗ distributes over ⊕ in Zmin. Therefore by consideringdefinition 10 again, the following equalities hold true,
((s1 ⊕ s2)¯ s3)(t) = (s1 ¯ s3)(t)⊕ (s2 ¯ s3)(t)= ((s1 ¯ s3)⊕ (s2 ¯ s3))(t).
By considering the same arguments (distributivity of ⊗ over∧ in Zmin, see example 1) equality 9 is obtained.This proposition (equation (8)) implies that mapping Πa isa ⊕-morphism (i.e. Πa(s1 ⊕ s2) = Πa(s1) ⊕ Πa(s2) andΠa(ε) = ε), then it is an isotone mapping.
Proposition 2: The mapping Πa : x 7→ a ¯ x definedover ZminJδK is residuated. The residual will be denoted(Πa)] : x 7→ a ¯] x. (Πa)](b) is the greatest series x ofZminJδK such that a¯ x ¹ b.
Proof: First, series ε is absorbing for the Hadamardproduct, then Πa(ε) = ε and the distributivity of ¯ over⊕ leads to ∀C ⊆ ZminJδK, Πa(
⊕x∈C x) =
⊕x∈C Πa(x),
therefore theorem 2 yields the result.
5
1 2
Fig. 1. A Single Input Single Output.
All the previous results stay valid in semiring NminJδK,which is defined as the set of formal power series withcoefficient in Nmin and exponent in N. A series s ∈ NminJδKis defined as follows :
s =⊕
t∈Ns(t)δt,
where s(t) ∈ Nmin. Semiring NminJδK is a sub semiring ofZminJδK and the top element is
⊕x∈NminJδK x = TNminJδK =
0δ+∞. Just remark that the top element is then equal to theneutral element of the Hadamard product (see definition 10).
Proposition 3: Let a be a series of NminJδK and Ca ={y|y ¹ a} be a subset of NminJδK. The mapping Ca|Πa :NminJδK → Ca, x 7→ a ¯ x is dually residuated. The dualresidual will be denoted (Ca|Πa)[ : x 7→ a ¯[ x. If b ∈ Ca
then (Ca|Πa)[(b) is the lowest series of NminJδK such thata¯ x º b.
Proof: First just note that ImΠa ⊆ Ca indeed Πa isan isotone mapping and ∀s ∈ NminJδK, s ¹ e¯ = TNminJδK,therefore ∀s ∈ NminJδK,Πa(s) ¹ Πa(e¯) = a. Further-more, the top element of Ca is TCa = a and Πa(TNminJδK) =Πa(e¯) = a = TCa . According to the distributivity property(see equation (9)) the following equality holds true, ∀A ⊆NminJδK, Πa(
∧x∈A x) =
∧x∈AΠa(x). The requirements of
theorem 2 are then satisfied, and yields the result.
IV. TIMED EVENT GRAPH DESCRIPTION
Timed event graphs can be seen as linear discrete eventdynamical systems in some semirings [6] [2]. For instance,by associating to each transition xi a “counter” function{xi(t)}t∈N, in which xi(t) is equal to the number of firing fortransition xi to time t, it is possible to obtain a linear staterepresentation in Zmin. As in conventional system theory,output {y(t)}t∈N of a SISO TEG is then expressed as a(min, +) convolution of its input {u(t)}t∈N by its impulseresponse1 {h(t)}t∈N. Counter {xi(t)}t∈N can be representedby a formal series in ZminJδK. For instance, considering theTEG drawn in figure 1, counters u, x1 and x2 are related asfollows over Zmin:
x1(t) = 2⊗ x1(t− 5)⊕ 1⊗ x2(t)⊕ u(t).
Their respective δ-transforms, expressed over ZminJδK, arethen related as:
x1 = 2δ5x1 ⊕ 1x2 ⊕ u.
1which is the output due to an infinity of input firings at date zero [18].
45
![Page 4: [IEEE 2008 9th International Workshop on Discrete Event Systems - Goteborg, Sweden (2008.05.28-2008.05.30)] 2008 9th International Workshop on Discrete Event Systems - Performance](https://reader040.pdfslide.us/reader040/viewer/2022030222/5750a4cd1a28abcf0cad2353/html5/page/4.jpg)
Consequently, by considering state vector x =(
x1
x2
), the
following representation over ZminJδK can be obtained :
x =(
2δ5 1δ 1δ2
)x⊕
(ee
)u
y =(ε e
)x.
In a general way, TEG model can be expressed as:
x = Ax⊕Bu
y = Cx,
where x ∈ ZminJδKn with n the number of internal transi-tions, u ∈ ZminJδKp with p the number of input transitionsand y ∈ ZminJδKq with q the number of output transitions.Matrices A, B and C are of appropriate size with their entriesin ZminJδK. According to theorem 1, this state system leadsto a transfer relation y = CA∗Bu, then in ZminJδK semiringthe transfer matrix of the TEG depicted in figure 1, is givenby :
CA∗B = (δ ⊕ 1δ3)(2δ5)∗. (10)
Entries of the transfer matrix are periodic series [1] whichare usually represented by2 p ⊕ q(νδτ )∗. The asymptoticslope3 of a periodic series s = p⊕ q(νδτ )∗ denoted σ∞(s)is defined as the ratio σ∞(s) = ν
τ .For a SISO system, input4 u = e yields output y =
(CA∗B)e = CA∗B which is called the impulse response ofthe system. This output is the lowest which can be achieved,i.e. the maximal number of tokens which can come out ofthe system at each time t. Thanks to corollary 1, it is possibleto compute the greatest input u which leads to this lowestoutput. This greatest input is given by :
u =⊕
{x|(CA∗B)u¹(CA∗Be)}x = (CA∗B)◦\(CA∗Be). (11)
This input represents the minimal number of tokens whichare necessary to achieve the lowest output.
Algorithms and software tools5 are available in order tohandle such periodic series (see [10] and [8] for algorithms).In particular, the last version allows to compute Hadamardproduct and its residuals (see propositions 2 and 3). Practicalcomputations can be obtained by considering the followingremark.
Remark 1: Let s and s′ be two series of NminJδK, let s”be a series defined as follows :
s” : s”(t) = s(t)− s′(t).
Series s” is not necessarily a monotonic series. Seriess¯] s′ can be obtained from s” by considering the greatest
2p is a polynomial that represents the transient and q is a polynomial thatrepresents a pattern which is repeated each τ time units and each ν firingsof the transition
3Asymptotic slope in a manufacturing context can be viewed as theproduction rate of the system.
4series e = 0δ0⊕1δ0⊕ ... represents an infinity of tokens at time t = 0.5Note that another library which handle ultimately pseudo periodic
functions is under development, see [5].
0 1 2 3 4 5 6 7 8 9 10 11 12 1312
1
2
3
4
5
6
7
8
9
10
11
12
13
s’
s
s s’#
time
s s’
t
event
num
ber
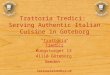
Fig. 2. Series s, s′, s¯] s′ and s¯[ s′.
monotonic series lower than or equal to s”, and dually s¯[s′
can be obtained by considering the lowest monotonic seriesgreater than or equal to s”.
Hereafter asymptotic slope resulting from operations be-tween series is given. If ν, ν′ 6= 0 and τ, τ ′ 6= 0, then
σ∞(s⊕ s′) = min(σ∞(s), σ∞(s′)),σ∞(s⊗ s′) = min(σ∞(s), σ∞(s′)),σ∞(s¯ s′) = σ∞(s) + σ∞(s′),
if s′ ¹ s then σ∞(s¯[ s′) = σ∞(s)− σ∞(s′),if σ∞(s) ≤ σ∞(s′) then σ∞(s¯] s′) = σ∞(s)− σ∞(s′),if σ∞(s) ≤ σ∞(s′) then σ∞(s′◦\s) = σ∞(s), else s′◦\s = ε.
Example 2: Let s′ = δ3⊕4δ8⊕8δ+∞ and s = e⊕2δ2⊕7δ5 ⊕ 13δ+∞ be two series representing counters of events.Series s′ can be read as no event has occurred until timet = 3, 4 events have occurred until time t = 8, and 8 eventsuntil time t = +∞, that means that the following events havenever occurred. Figure 2 proposes a graphical representationof s, s′, s ¯] s′ = e ⊕ 2δ2 ⊕ 7δ5 ⊕ 9δ+∞ and s ¯[ s′ =e⊕ 2δ2 ⊕ 3δ5 ⊕ 5δ+∞. Furthermore, it can be checked that(s ¯] s′) ¯ s′ = e ⊕ 2δ2 ⊕ 7δ3 ⊕ 11δ5 ⊕ 13δ8 ⊕ 17δ+∞ islower than s and dually that (s¯[ s′)¯s′ = e⊕2δ2⊕3δ3⊕7δ5 ⊕ 9δ8 ⊕ 13δ+∞ is greater than s.
V. MAXIMAL FLOW FOR LINEAR SYSTEMS
The problem addressed now is to compute the lowestoutput of a system made up of several SISO sub-systems, inthe presence of cross-inputs, and the greatest input allowingto achieve this lowest output. First, the case of one interferinginput is considered and algorithms, which generalize theapproach, are given in a second step.
A. One interfering input on a SISO system
Figure 3 depicts the system studied. Two inputs α1 and α2
put tokens in a system which is characterized by a transferrelation denoted β, then the system output is given by :
y = β ⊗ (α1 ¯ α2).
46
![Page 5: [IEEE 2008 9th International Workshop on Discrete Event Systems - Goteborg, Sweden (2008.05.28-2008.05.30)] 2008 9th International Workshop on Discrete Event Systems - Performance](https://reader040.pdfslide.us/reader040/viewer/2022030222/5750a4cd1a28abcf0cad2353/html5/page/5.jpg)
a
a
1
b
Fig. 3. A system with two convergent inputs.
Trajectories α1, α2, u and y are depicted by series ofNminJδK. Input α2 and output y = βu are assumed to beknown. The problem considered is to compute the greatestinput α1 which must be added to α2 in order to achieveoutput y. Furthermore the flows are assumed to be blindlymultiplexing, roughly speaking this means that the worst casemust be considered for input α1 (see [20] for a discussionin the network calculus context).
Then, this problem consists in computing the greatestα1 such that β(α1 ¯ α2) ¹ y. Thanks to corollary 1 andproposition 2, this input is given by :
α1 =⊕
{x|β(x¯α2)¹y}x = (β◦\y)¯] α2. (12)
As said previously, for a SISO system, the best output (thelowest series) is given by the impulse response y = β, andthe greatest input allowing to achieve this output is given by :β◦\β (see equation (11)). Therefore, by considering equation(12), the greatest series α1 which leads to the lowest outputy = β is given by :
α1 = (β◦\β)¯] α2. (13)
This bound characterizes the minimal number of tokenswhich must be added to α2 to obtain output y = β, it isnot necessary to introduce more tokens, they would not beprocessed by the system, in other words α1 is the maximalflow which can be added to this system.
b
a1
a
Fig. 4. A system with two divergent outputs.
Figure 4 presents a dual problem to the previous one. Theoutput of a system y = βu is assumed to be known, a partof the output flow is devoted to output α2. This output isassumed to be known and satisfying condition α2 º y. Theproblem arising is to know what maximal flow α1 can beachieved. This problem can be expressed as the computationof the lowest series α1 which is such that (α1 ¯ α2) º y,formally:
α1 =∧
{x|(α2¯x)ºy}x.
Conditions about dual residuation of the Hadamard productbeing fulfilled (see proposition 3), the lowest series is givenby :
α1 = y ¯[ α2. (14)
It characterizes the maximal flow which can go towardsoutput α1 while preserving output α2.
B. Several interfering inputs on several SISO sub-systems
Now, let us consider a principal flow α(s1,en)1 , crossing
sub-systems β1, ..., βn in that order. Let α(sd,.) be the inputinterfering with α
(s1,en)1 , in the front of sub-system βd with
d ∈ {1, .., n} and let α(.,eq) be the output leaving the systemafter sub-system βq with q ∈ {1, .., n}.
For each stage i, the system input is denoted ui and thesystem output is denoted yi = βiui. Secondary inputs α(si,.)
and outputs α(.,ei) are assumed to be known.On each node, the flows are linked by a kind of monotonic
version of the Kirchhoff law, which can be expressed asfollows:
yi ¯ α(si+1,.) = ui+1 ¯ α(.,ei). (15)
The following condition is assumed to be fulfilledα(.,ei) º (yi ¯ α(si+1,.)), it means that the flow leaving thenode is lower than or equal to the flow coming in the node.Therefore the lowest input ui+1 satisfying equality (15) isgiven by (see equation (14)):
ui+1 = (yi ¯ α(si+1,.))¯[ α(.,ei). (16)
This signal represents, at each time t, the maximal numberof tokens which can go towards ui+1, while preservingoutput α(.,ei).
Dually, the greatest output yi satisfying equation (15) isgiven by :
yi = (ui+1 ¯ α(.,ei))¯] α(si+1,.). (17)
This signal represents, at each time t, the minimal numberof tokens which are necessary to satisfy equality (15).
The signal due to the principal flow in the front ofsystem βi is denoted α1i. By considering, in a first step,that the principal flow is characterized by an impulse input,i.e. α11 = e, it is possible to compute recursively systeminputs ui, system outputs yi and to obtain the lowest signalα1(n+1) characterizing the maximal instantaneous flowwhich can go towards this output (see forward algorithm 1based on equation (14)).
Algorithm 1: Forward computation of the lowest princi-pal output α1(n+1)
Data: Series βi, α(si,.), α(.,ei).Result: Series ui, yi, α1(n+1).begin
u1 = α(s1,.) ¯ e;y1 = β1u1;for i = 2 to i = n do
ui = (yi−1 ¯ α(si,.))¯[ α(.,ei−1);yi = βiui;
α1(n+1) = yn ¯[ α(.,en).end
Conversely, by considering the backward algorithm 2,based on equation (12), it is possible to compute the greatest
47
![Page 6: [IEEE 2008 9th International Workshop on Discrete Event Systems - Goteborg, Sweden (2008.05.28-2008.05.30)] 2008 9th International Workshop on Discrete Event Systems - Performance](https://reader040.pdfslide.us/reader040/viewer/2022030222/5750a4cd1a28abcf0cad2353/html5/page/6.jpg)
b b
a
b
a14
(., )e2
( ,.)s2
33
1
b b
aa
bb( ,.)s
(., )e
1
1
2
( ,.)s2
3
33
a(., )e3
a
a
Fig. 5. A system with two interfering inputs.
input α11 allowing to satisfy the lowest output α1(n+1). Thissignal characterizes the minimal number of tokens whichmust be introduced in the system to obtain output α1(n+1),it is not necessary to introduce more tokens, they would notbe processed by the system.
Algorithm 2: Backward computation of the greatestprincipal input α11.
Data: Series βi, ui, α(si,.), α(.,ei), α1(n+1).Result: Series α11.begin
yn = α1(n+1) ¯ α(.,en);un = βn◦\yn ;for i = n− 1 to i = 1 do
yi = (ui+1 ¯ α(.,ei))¯] α(si+1,.) ;ui = βi◦\yi ;
α11 = u1 ¯] α(s1,.).end
Figure 5 depicts the system studied to illustrate the results.The system is composed of three sub-systems of whichtransfer are assumed to be given by :β1 = (δ ⊕ 1δ3)(2δ5)∗, β2 = δ5(2δ6)∗, β3 = δ7(8δ5)∗.Secondary inputs and outputs trajectories are assumed tobe known. The upstream input of system 1 is given byα(s1,.) = e ⊕ 2δ10 ⊕ 4δ19 ⊕ 5δ+∞, the upstream input ofsystem 2 is given by α(s2,.) = e ⊕ 1δ9 ⊕ 2δ15 ⊕ 3δ+∞,the downstream output of system 2 is given by α(.,e2) =δ6⊕2δ18⊕4δ26⊕5δ+∞ and the downstream output of system3 is given by α(.,e3) = δ30⊕1δ33⊕2δ39⊕3δ+∞. Algorithm1 allows to compute the lowest series for the principal flow:α14 = (δ36 ⊕ 1δ37)(2δ6)∗.Algorithm 2 yields the greatest series allowing to achieveα14 while preserving secondary outputs:α11 = δ6 ⊕ (1δ24 ⊕ 2δ28)(2δ6)∗.
VI. CONCLUSION
In this paper is computed the maximal flow which canbe added to a system composed of many (max,+) linearsubsystems with exogenous inputs interfering in additiveway. The next step will be to compute the maximal flowin a network of (max,+) systems. Usually the networksconsidered are with constant capacity. Therefore this resultswould be a generalization of the classical case (see [9]).An avenue is to formalize this problem such as a constraintsatisfaction problem (see [13]).
ACKNOWLEDGEMENT
The authors are grateful to V. Reverdy for her valuablelinguistic help.
REFERENCES
[1] F. Baccelli, G. Cohen, and B. Gaujal. Recursive equations and basicproperties of timed Petri nets. J. of Discrete Event Dynamic Systems,1(4):415–439, 1992.
[2] F. Baccelli, G. Cohen, G.J. Olsder, and J.P. Quadrat. Synchronisationand Linearity: An Algebra for Discrete Event Systems. John Wileyand Sons, New York, 1992.
[3] T.S. Blyth and M.F. Janowitz. Residuation Theory. Pergamon Press,Oxford, 1972.
[4] J.L. Boimond, L. Hardouin, and P. Chiron. A Modeling Method ofSISO Discrete-Event Systems in max Algebra. pages 2023–2026,Roma, 1995.
[5] A. Bouillard and E. Thierry. Optimal routing for end-to-end guar-antees: the price of multiplexing. Discrete Event Dynamic Systems,18:3–49, 2008.
[6] G. Cohen, P. Moller, J.P. Quadrat, and M. Viot. Algebraic Toolsfor the Performance Evaluation of Discrete Event Systems. IEEEProceedings: Special issue on Discrete Event Systems, 77(1):39–58,January 1989.
[7] B. Cottenceau, M. Lhommeau, L. Hardouin, and J.-L. Boimond.On Timed Event Graph Stabilization by Output Feedback in Dioid.Kybernetika, 39(2):165–176, 2003.
[8] S. Gaubert. Theorie des Systemes Lineaires dans les Dioıdes. These,Ecole des Mines de Paris, July 1992.
[9] M. Gondran and M. Minoux. Graphes et algorithmes. Eyrolles, Paris,1979. Engl. transl. Graphs and Algorithms, Wiley, 1984.
[10] L. Hardouin, B. Cottenceau, and M. Lhommeau. Soft-ware Tools for Manipulating Periodic Series. http://www.istia-angers.fr/˜hardouin/outils.html., 2001.
[11] L. Hardouin, E. Menguy, J.-L. Boimond, and J.-L. Ferrier. SISODiscrete Event Systems Control in Dioids Algebra. Special issue ofJournal Europeen des Systemes Automatises (JESA), 31(3):433–452,1997.
[12] B. Heidergott, G.-J Olsder, and J. van der Woude. Max Plus at Work: Modeling and Analysis of Synchronized Systems: A Course on Max-Plus Algebra and Its Applications. Princeton University Press, 2006.
[13] L. Jaulin, S. Ratschan, and L. Hardouin. Set computation for non-linear control. Reliable Computing, 10:1–26, 2004.
[14] J.-Y LeBoudec and P. Thiran. Network Calculus. Springer Verlag,2002.
[15] M. Lhommeau, L. Hardouin, and B. Cottenceau. Disturbance De-coupling of Timed Event Graphs by Output Feedback Controller.In WODES’2002, Workshop on Discrete Event Systems, Zaragoza,Espagne, Octobre 2002.
[16] C.A. Maia, L. Hardouin, R. Santos-Mendes, and B. Cottenceau. Onthe Model Reference Control for Max-Plus Linear Systems. In 44thIEEE CDC-ECC’05, Sevilla, Spain, 2005.
[17] C.A. Maia, R. Santos-Mendes, and L. Hardouin. Some Resultson Identification of Timed Event Graphs in Dioid. In 11th IEEEMediterranean Conference on Control and Automation, MED’2003,Rhodes, Grece, Juin 2003.
[18] MaxPlus. Second Order Theory of Min-linear Systems and itsApplication to Discrete Event Systems. In Proceedings of the 30thCDC, Brighton, England, December 1991.
[19] E. Menguy, J.-L. Boimond, and L. Hardouin. Adaptive control forlinear systems in max-algebra. In 4th International Workshop onDiscrete Event Systems, WODES’98, pages 481–488, Cagliari, Italie,Aout 1998.
[20] J.B. Schmitt, F.A. Zdarsky, and I. Martinovic. Performance boundsin feed-forward networks under blind multiplexing. Technical Re-port, http://disco.informatik.uni-kl.de/publications/SZM06-1.pdf, (349-06), 2006 .
[21] G. Schullerus, V. Krebs, B. De Schutter, and T. van den Boom.Input signal design for identification of max-plus-linear systems.Automatica, 42(6):937–943, June 2006.
[22] B. De Schutter and T. van den Boom. Model predictive control formax-plus linear discrete event systems. Automatica, vol. 37(7), July2001.
48