Embed Size (px)
Citation preview
![Page 1: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - Study on Neural Networks](https://reader031.pdfslide.us/reader031/viewer/2022030105/57509f7f1a28abbf6b1a3635/html5/thumbnails/1.jpg)
Study on Neural Networks Control Algorithms for
Automotive Adaptive Suspension SystemsL.J.Fu, J.G.Cao
School of Automobile Engineering, ChongqingInstitute of Technology,
Xingsheng Road No.04 Yangjiaping,Chongqing, China 400050E-mail: [email protected]
Abstract-The semi-active suspension, which consists ofpassive spring and active shock absorber in the light ofdifferent road conditions and automobile running conditions, isthe most popular automotive suspension because activesuspension is complicated in structure and passive suspensioncannot meet the demands of various road conditions andautomobile running conditions. In this paper, a neurofuzzyadaptive control controller via modeling of recurrent neuralnetworks of automotive suspension is presented. The modelingof neural networks has identified automotive suspensiondynamic parameters and provided learning signals toneurofuzzy adaptive control controller. In order to verifycontrol results, a mini-bus fitted with magnetorheological fluidshock absorber and neurofuzzy control system based on DSPmicroprocessor has been experimented with various velocityand road surfaces. The control results have been comparedwith those of open loop passive suspension system. Theseresults show that neural control algorithm exhibits goodperformance to reduction of mini-bus vibration.
I. INTRODUCTION
The main functions of automotive suspension system areto provide support the weight of automobile, to providestability and direction control during handling maneuversand to provide effective isolation from road disturbances.These different tasks lead to conflicting design requirements.The semi-active suspension, which consists of passivespring and active shock absorber with controllable dampingforce in the light of different road conditions and automobilerunning conditions, is the most popular automotivesuspension because the active suspension is complicated instructure and conventional passive suspension cannot meetthe demands of different road conditions and automobilerunning conditions. Simi-active suspension with variablemagnetorheological(MR) fluid shock absorbers has someadvantages in reducing automobile vibration at relative lowcast and power. So far, there are a number of controlmethods that have been developed for semi-activesuspension, start with skyhook method described byKarnoopp, et al.[l] This method attempts to make the shockabsorber exert a force that is proportional to the absolutevelocity between sprung masses. Some investigations use
C. R. Liao, B. ChenSchool ofAutomobile Engineering, Chongqing
Institute ofTechnology,Xingsheng Road No.04 Yangjiaping,
Chongqing, China 400050E-mail: chenbao(cqit.edu.cn
linear suspension model, which is linearized around theoperational points, and control algorithm are derived usinglinear models, such as LQG and robust control [2,3]. Thesecontrol methods cannot make a full exploitation ofsemi-active suspension resources because of automotivesuspension is inherent non-linear performance. In order toimprove performance of nonlinear suspension system, someintelligent control techniques, such as fuzzy logic control,neural networks control and neurofuzzy control, have beenrecently applied to nonlinear suspension control byresearchers [4,5].
In this paper, a neurofuzzy adaptive control controller isapplied to control suspension vibration via modeling ofrecurrent neural networks of automotive suspension andcontinuously variable MR shock absorbers. The controllerstructures design and neurofuzzy control algorithms arepresented in section 2. A recurrent neural networksdynamics modeling of suspension are shown respectively insection3. The control system experimentations are given insection 4 and some conclusions are finally drawn in section5.
HI. NEUROFUZZY ADAPTIVE CONTROL ALGORITHMS FORAUTOMOTIVE SUSPENSIONS
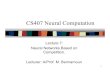
The neurofuzzy control system presented in this paper,shown in Figure 1, is composed of a neurofuzzy networkand a recurrent neural network modeling of mini-bussuspension. The neurofuzzy network is defined as adaptivecontroller, which has function of learning and control. Thefunction of recurrent neural network is to identify mini-bussuspension model parameters. y(t) and yd(t) are systemactual output and system desire output respectively in Figure1. xl(t) is system error of system actual output betweensystem desire output, x2(t) is system error rate of systemactual output between system desire output. xi (t)and x2 (t)are defined as fellows:
xI (t) e(t)= y(t)- Yd (t) (1)X2 (t)= e(t)= e(t + 1)- e(t) (2)
0-7803-9422-4/05/$20.00 C2005 IEEE1795
![Page 2: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - Study on Neural Networks](https://reader031.pdfslide.us/reader031/viewer/2022030105/57509f7f1a28abbf6b1a3635/html5/thumbnails/2.jpg)
Fig. 1. structure of neural networks control system for suspension
networks control system .The global sets of linguisticvariables are defined respectively as fellows: - = [- E,E],
1= [-AtJ] u U[-U,U]. The neurofuzzy controller hasfour layers ne-urons, in which the first and the second layerscorrespond to the fuizzy rules if-part, the third layercorresponds to the inference and the forth layer correspondsto the fuzzy rules then-part. The sets xl, x2and u arerespectively divined into seven fuzzy subsets ofwhich fuzzysets X1, X2 U are composed as fallows rules:
X1 = {NB,NM,NS,ZE,PS,PM,PB}X2 = {NB,NM,NS,ZE,PS,PM,PB}U = {NB,NM, NS,ZE, PS,PM,PB}In this paper, the Gaussian membership function are used
in elements of fuzzy sets X1 X2 and the elements offuzzy set U is defined as following membership function
'ci(u)J0 (otherwise)
0(3) = I(3) k = 1,2,3 ... 49 j = 13,23,3 ... 749 49
Layer4:(4) - (3)wk and 0(4) = I(4) / 0(3)k=1 k=1
Where xl(t) x2(t) are the inputs of neural networks,wk is weight of neural network, 0(4) iS the output ofneural networks in which 0(4) = U, ai, b,j are the centralvalues of Gaussian membership function. Learningalgorithms of the neural networks controller is based ongradient descent by means of error signal back-propagationmethod. The error back-propagation algorithm.s accomplishsynaptic weight adjustment through minimization of costfunction [5].
m. ALGORITHM FOR RECURRENT NEURAL NETWORKSSUSPENSION DYNAMICAL MODELING
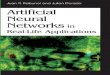
A recurrent neural network designed to approximate tothe actual output of suspension y(t) is three-layer neuralnetwork with one local feedback loop in the hidden layer,whose architectures are shown in Figure 3. The property thatis ofprimary significance for recurrent neural network is theability of the network to learn from its environment and toimprove its performances by means of process ofadjustments applied to its weights. The recurrent networkwith input signal II (t) = u(t) and I2 (t) = y(t -1) hasoutput y(t) by local feedback loop neuron in the hiddenlayer whose output sum is Sj (t) corresponding to the
neuron jth .(3)
Fig. 2. schematic ofneural networks controller for adaptive suspension
Where U * E u . The input/output is presented as followsaccording to Figure 2.
Layer 1: I(1)x(t) and O ) xi(t) i = 1,2Layer 2: I -2) ((t)-ai )2 /b 2 and
O.. epx()) i = 1,2 j=1,2,3 ... 7Layer 3: I[13) = t u(X2 Q))I and
Fig. 3. schematic ofneural networks modeling of suspension system
(4)Sy()=,w.*i (t)+ WJD _ Xj (t-_1)i1=
(i(t)+wj Xj(t_lq
yj(t)= 1w° xi(t)j=l
(5)
(6)
1796
![Page 3: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - Study on Neural Networks](https://reader031.pdfslide.us/reader031/viewer/2022030105/57509f7f1a28abbf6b1a3635/html5/thumbnails/3.jpg)
where w'I , , w° are weight of the recurrent neural
network, Xj(t)is output of neuron with local feedbackloop neuron in the hidden layer, p , q are input neuronnumber and feedback neuron number respectively. Theactivation function for both input neurons and outputneurons is linear function, while the activation for neuronsin the hidden layer is sigmoid function.
he objective function E(t) can be defmed in the terms ofthe error signal e(t) as:
E(t) = _[y(t)- .y(t)]2 = 1e2(t) (7)2 2
That is, E(t) is the instantaneous value of the errorenergy. The step-by-step adjustments to the synaptic weightsof neuron are continued until the system reach steady state,i.e. the synaptic weights are essentially stabilized.Differentiating E(t) with respect to weight vector wyields.
aE(t) __ 8=-e(t) 0Y() (8)
From expression (1), (2) and (3), differentiating A(t)0 D Iwith respect to the weight vector w1 w,- , w,-Y respectively
yields.
aS(t)= x (t)
As(t) wo ax1Q)
-( W aXI (t)aWj J aWj
From (4), (5) and (6), analyzing
value of synaptic weight is determined by
w(t + 1) = w(t)+ q * e(t) 89(t) (12)
where q the leaning-rate parameter, A detailedconvergence analysis of the recurrent training algorithm israther complicated to acquire the leaning-rate parametervalue. According to expression (13), the weight vector wfor recurrent neural network can be adjusted. We establish athe Lyapunov function as follows V(t) = 1/2 * e2 (t),whose change value AV(t) can be determined after somet iterations, in the sense that
(13)
We have noticed that the error signal e(t) after some titerations can be expressed as follows from expression (13)and(14),ae(t) ao(t) ae(t) ae(t)-- ~,Aw=-qe(t)~ =77e(t) ~,theaw "O"w aw 'O"wLyapunov function increment can determined after some titerations as follows
(14)Mtt)= --q- &(t) +v2.e(t)-- =-V(t)where
^(t) 2 2jt 1> 6(t) 2A = 1 0'()lp q 2-5l 0(t)ll >]2 ql[2-77'] >O°2 20w
(9) ?7 maxa~(t) 29 if <q'f< 2, then AV(t)<O,w
ax1(t)D andaWj
x1 (t)uxi
yields respectively recurrent formulas.ax1 (t) a-f[S (t)]FX.x(tt 1) 1
ax1 (O) =,WjD
=
axi (t)aNi
af S(t)] [ + w a t- i)
&4 L aN'iax1(o) (11)avn =0
Having computed the synaptic adjustment, the updated
namely the recurrent training algorithm is convergent.
IV. ROAD TEST AND RESULTS ANALYSES
To make a demonstration the validity of neural controlalgorithm proposed in the paper, an experimental mini-bussuspension with MR fluid shock absorber has beenmanufactured in China. The mini-bus adaptive suspensionsystem consists of a DSP microprocessor, 8 accelerationsensors, 4 MR fluid shock absorbers, and 1 controllableelectric current power with input voltage 12V. The DSPmicroprocessor receives suspension vibration signal inputfrom accelerometers mounted respectively sprung mass andun-sprung mass. In accordance with vibration signal andcontrol scheme in this paper, the DSP microprocessoradjusts damping of adaptive suspension by applicationcontrol signal to the controllable electric current powerconnected to electromagnetic coil in MR fluid shockabsorbers. Magnetic field produced by the electromagneticcoil in MR fluid shock absorbers can d vary damping forcein both compression and rebound by adjustment of flow
1797
I I
,&V(t) = 1 2 (t +1)-e2 (t2
![Page 4: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - Study on Neural Networks](https://reader031.pdfslide.us/reader031/viewer/2022030105/57509f7f1a28abbf6b1a3635/html5/thumbnails/4.jpg)
behaviors ofMR fluids in damping channels.Raod test on mini-bus adaptive suspension based neuralnetworks control presented in this paper are carried out in Dclass road surfaces respectively in running velocity30,40,50km/h. During road test, experimental mini-bus runseach test condition at a constant speed. The test experimentsof adaptive suspension with neural networks and passivesuspension system were carried out repeatedly under sameroad surface and running velocity. Test results listed in Table1 have shown that the adaptive suspension with neuralnetworks can reduce vibration power spectral densities ofboth sprung mass and un-sprung mass.
Figure 4 is the min-bus suspension vibration power
spectral densities of both sprung mass and un-sprung masswith passive and adaptive suspension system by D classroad surface. It is clear that neural networks controlimproves performances of mini-bus suspension with mainlyimprovements occurring about sprung mass resonance peak.The power spectral densities indicate that the adaptivesuspension system with neural networks control can reducemini-bus vibration greatly compared with passivesuspension. If excellent fizzy control rules and rationalmodeling of shock absorber and suspension can be obtained,the adaptive suspension system with neural networks controlwill improve farther ride comfort and road holding andhandling stability of automobile in the future.
TABLE I
min-bus suspension road test results:
sprung mass and un-sprung mass acceleration r.m.s. Values (D class road)
Speed 30(1km/h) 40(1m/h) 50(kmlh)
Passive Control reduce Passive Control reduce Passive Control reduce
| mass 1 0.3756 0.3252 13.4 0.4140 0.3449 16.7 0.4694 0.3966 15.5mass
pg 1.6011 14266 10.9 1.8975 1.6603 12.5 2.3468 2.0652 12.0mass
IC, -'4 a
|1 -#, ~~~~~~~~~~~- t0
ri-01 10.1.lo1
Fr y-
0Q gco1okaId -e
la.r 10f 1FrcqvO
Fig. 4. min-bus suspension vibration power spectral densities of sprung mass (left)
and un-sprung mass (right) with control and passive (running speed 40km/h)
V. CONCLUSIONS
In this paper, a new recurrent neural networks-orientedsuspension model and neurofuzzy control schemes for themini-bus suspension system were investigated. Upon the
requirement of using 8 acceleration sensors, a DSPcontroller with gain scheduling was developed.Considering the complexity of the MR fluid shockabsorber, the actuator dynamics has been incorporatedduring the hardware-in-the-loop simulations. It wasdemonstrated that the adaptive control system could
1798
![Page 5: [IEEE 2005 International Conference on Neural Networks and Brain - Beijing, China (13-15 Oct. 2005)] 2005 International Conference on Neural Networks and Brain - Study on Neural Networks](https://reader031.pdfslide.us/reader031/viewer/2022030105/57509f7f1a28abbf6b1a3635/html5/thumbnails/5.jpg)
achieve a competitive control performance by adopting theneurofuzzy control schemes and recurrent neuralnetworks-oriented suspension. Because the control lawdesign, the gain scheduling strategy, and thehardware-in-the-loop simulation method developed in thispaper are restricted to a min-bus suspension system withspecific parameters, the entire strategy can be extended toother semi-active system if suspension parameters arechanged. Road test results show that neurofizzy controllercan effectively improve mini-bus ride comfort and roadholding. It is feasible to employ DSP control to suppresswhole vehicle vibration, including in sprung massvibration and un-sprung mass vibration. The neurofuzzycontroller shows some robust capability and can minimizeinfluences on suspension model parameters changes,which are important factors to improve control systemperformance.
REFERENCES
[1] Kanopp D. (1995) Active and Semi-active Vibration Isolation,Transactions ofASME, Journal of Special 50th Anniversary DesignIssue, Vol.117, pp1 17-125.
[2] Chantrnuwathhana,S. and Peng,H. (1999) Adaptive Robust Controlfor Active Suspension, proceedings of the American ControlConference, San Diego, California, pp.l702-1706
[3] Yu, F. and Crolla,D.A.(1998) An Optimal Self-Tuning Controller forActive Suspension, Vehicle System Dynamics, vol.29, pp.51-65
[4] Zadeh,A., Fahim,A., and El-Gindy,M. (1997) Neural Networks andFuzzy Logic Applications to Vehicle System, International Journal ofVehicle Design, vol.18(2), pp.132-193
[5] Wuwei Chen, James K. Mills and Le Wu,(2003) Neurofuzzy andFuzzy Control ofAutomotive Semi-Active Suspensions, InternationalJournal of Vehicle Autonomous Systems ,vol.1(2),pp.222-236
1799














![Deep Parametric Continuous Convolutional Neural Networks€¦ · Graph Neural Networks: Graph neural networks (GNNs) [25] are generalizations of neural networks to graph structured](https://img.pdfslide.us/doc/110x75/5f7096c356401635d36dbe30/deep-parametric-continuous-convolutional-neural-networks-graph-neural-networks.jpg)