Embed Size (px)
Citation preview

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Identification of Interconnected Systemsby Instrumental Variables Method
Grzegorz Mzyk
Institute of Computer Engineering, Control and RoboticsWrocław University of Technology
Poland
3th-May-2012

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Structure of the presentation
1 Identification of single-element systems—MISO linear static element—SISO linear dynamic elementLeast squares (LS) method and instrumental variables(IV) method
2 Interconnected linear static systems—LS-based estimate and limit properties— IV-based estimate and limit properties—generation of instrumental variables
3 Nonlinear dynamic block-oriented systems—Hammerstein system—NARMAX system

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Structure of the presentation
1 Identification of single-element systems—MISO linear static element—SISO linear dynamic elementLeast squares (LS) method and instrumental variables(IV) method
2 Interconnected linear static systems—LS-based estimate and limit properties— IV-based estimate and limit properties—generation of instrumental variables
3 Nonlinear dynamic block-oriented systems—Hammerstein system—NARMAX system

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Structure of the presentation
1 Identification of single-element systems—MISO linear static element—SISO linear dynamic elementLeast squares (LS) method and instrumental variables(IV) method
2 Interconnected linear static systems—LS-based estimate and limit properties— IV-based estimate and limit properties—generation of instrumental variables
3 Nonlinear dynamic block-oriented systems—Hammerstein system—NARMAX system

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
MISO linear static block
(1)x(2)x
( )sx
y*a
z
Figure: MISO linear static block
a∗ =
a∗1a∗2...a∗s
Assumptions:
Ez = 0, varz < ∞x (i ), z — independent !!!
XN =
xT1xT2...xTN
=x (1)1 x (2)1 .. x (s)1x (1)2 x (2)2 .. x (s)2...
.........
x (1)N x (2)N .. x (s)N

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
MISO linear static block (continued)
YN =
y1y2...yN
, ZN =z1z2...zN
Measurement equation
YN = XNa∗ + ZN
Model
YN (a) = XNa
Least squares criterion∥∥YN −YN (a)∥∥22 → mina
Normal equation
XTNXNa = XTNYN
Uniqueness of the solution
rankXN = s
LS estimate
aN=(XTNXN
)−1XTNYN = X
+NYN
aNp.1→ a∗, as N → ∞

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
FIR linear dynamics
kyku kvkε
)( 1−qB
Figure: Linear dynamic object MA(s)
vk = b∗0uk + ...+ b
∗s uk−s
yk = vk + εk
yk = b∗0uk + ...+ b
∗s uk−s + zk
zk = εk

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
FIR linear dynamics (2)
ku
ky*b
kz1ku −
k su −
Figure: MA object
b∗ =
b∗0b∗1...b∗s
Assumptions:
Ez = 0, varz < ∞{uk} , {zk} — independent !!!
ΦN =
φT1
φT2
...φTN
=u1 u0 .. u1−su2 u1 .. u2−s...
.........
uN uN−1 .. uN−s
YN = ΦNb∗ + ZN bN=
(ΦTNΦN
)−1ΦTNYN

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
IIR linear dynamics
kyku ( )( )
1
1
B q
A q
−
−
kvkε
Figure: Linear dynamic object ARMA(s,p)
vk = b∗0uk + ...+ b
∗s uk−s + a
∗1vk−1 + ....+ a
∗pvk−p
yk = vk + εk
yk = b∗0uk + ...+ b
∗s uk−s + a
∗1yk−1 + ....+ a
∗pyk−p + zk
zk = εk − a∗1εk−1 − ...− a∗pεk−p

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
IIR linear dynamics (2)
ku
ky*θ
kz1ku −
k su −
1ky −
k py −
Figure: ARMA object
θ∗ =
b∗0b∗1...b∗sa∗1a∗2...a∗p
Ez = 0, varz < ∞
uk−i , zk — independentyk−i , zk — correlated !!!

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
IIR linear dynamics (3)
ΦN =
φT1
φT2
...φTN
=u1 u0 · · · u1−s y0 y−1 · · · y1−pu2 u1 · · · u2−s y1 y0 · · · y2−p...
......
......
......
...uN uN−1 · · · uN−s yN−1 yN−2 · · · yN−p
YN = ΦN θ∗ + ZN θN=
(ΦTNΦN
)−1ΦTNYN

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Instrumental variables approach
θIVN =
(ΨTNΦN
)−1ΨTNYN
Consistency conditions(a) dimΨN = dimΦN , i.e. ΨN = (ψ1, ...,ψN )
T ,dimψk = s + p + 1(b) PlimN→∞
( 1N ΨT
NΦN)exists and is not singular
(c) PlimN→∞( 1N ΨT
NZN)= 0
θIVN
p→ θ∗, as N → ∞
Generation of the instruments ψk
1) ψk = (uk , uk−1, ..., uk−s , uk−s−1, ..., uk−s−p)T
2) ψk =(uk , uk−1, ..., uk−s , y k−1, ..., y k−p
)T , where y k−i —model output (e.g. L.S.)

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Instrumental variables approach
θIVN =
(ΨTNΦN
)−1ΨTNYN
Consistency conditions(a) dimΨN = dimΦN , i.e. ΨN = (ψ1, ...,ψN )
T ,dimψk = s + p + 1(b) PlimN→∞
( 1N ΨT
NΦN)exists and is not singular
(c) PlimN→∞( 1N ΨT
NZN)= 0
θIVN
p→ θ∗, as N → ∞
Generation of the instruments ψk
1) ψk = (uk , uk−1, ..., uk−s , uk−s−1, ..., uk−s−p)T
2) ψk =(uk , uk−1, ..., uk−s , y k−1, ..., y k−p
)T , where y k−i —model output (e.g. L.S.)

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
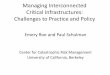
Interconnected systems
1u
1y
nuiu
11,ba
nn ba ,ii ba ,
H
nyiy
1x
nxix
1δ iδ nδ
1ξ
iξ
nξ
Figure: Interconnected MIMO linear static system

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Identification of i-th element
yi = aixi + biui + ξ i (i = 1, 2, ..., n)
xi = Hiy + δi
YiN = (ai , bi )WiN + ξ i
YiN = [y (1)i , y (2)i , ..., y (N )i ]
WiN = [w (1)i ,w (2)i , ...,w (N )i ], where wi = (xi , ui )T ,

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Least squares based approach
(al .s .i , bl .s .i ) = YiNWTiN
(WiNW
TiN
)−1WiN = [w
(1)i , w (2)i , ..., w (N )i ]
wi = (xi , ui )T , where xi = Hiy = xi − δi .
The estimation error
(al .s .i , bl .s .i )− (ai , bi ) = ΘiNWiN
(WiNW
TiN
)−1does not tend to zero, as N → ∞.

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Instrumental variables estimate
(ai .v .i , bi .v .i ) = YiNΨTiN
(W TiNΨT
iN
)−1ΨiN = [ψ
(1)i ,ψ
(2)i , ...,ψ
(N )i ]
ψ(k )i =
(ψ(k )i ,1 ,ψ
(k )i ,2
)TTheoremThe optimal instruments with respect to the value of
Q(ΨiN ) = ‖∆(ΨiN )‖ = λmax(
∆(ΨiN )∆T (ΨiN ))
has the form
ψ∗i = w i = (x i , ui )T , where x i = E (xi |u) = HiKu.

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Hammerstein system
ku kykz
kw( )⋅μ { } 0i iγ ∞
=kv
Figure: Hammerstein system
A1: |uk | 6 umax, ∃ p.d.f. ν(u)A2:
|µ(u)| 6 wmaxA3:
∞
∑i=0|γi | < ∞
A4: µ(u0) is known for someu0 and γ0 = 1
A5:
zk =∞
∑i=0
ωi εk−i
{εk} — i.i.d. process,independent of {uk}, E εk = 0,|εk | 6 εmax{ωi}∞
i=0 —unknown,∑∞i=0 |ωi | < ∞

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Nonparametric regression
Regression function
E (yk |uk = u) = µ (u)
Kernel estimate
µ(u) =N
∑k=1
K (u − ukh(N)
) · yk
/N
∑k=1
K (u − ukh(N)
)
Orthogonal estimate (wavelet-based)
µ (u) =2M−1∑n=0
αMnϕMn (u) +K−1∑m=M
2m−1∑n=0
βmnψmn (u)
αMn =k
∑l=1
yl∫ ulul−1
ϕMn (u) du βmn =k
∑l=1
yl ·∫ ulul−1
ψmn (u) du

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Parametric knowledge
ku kykz
kw( )*,cuμ { } 0i iγ ∞
=
kv
Figure: Hammerstein system (parametric model of the static nonlinearity)
given µ(u, c), such that µ(u, c∗) = µ(u), wherec∗ = (c∗1 , c
∗2 , ..., c
∗m)
T —true parametersµ(u, c) —differentiable with respect to cfor each u ∈ [−umax, umax] it holds that
‖5cµ(u, c)‖ 6 Gmax < ∞, c ∈ O(c∗)c∗ is identifiable, i.e. there exits the sequence u1, u2, ..., uN0such that
µ(un, c) = µ(un, c∗), n = 1, 2, ...,N0 ⇒ c = c∗

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Nonlinearity estimation
QN0(c) = ∑N0n=1 [wn − µ(un, c)]
2 c∗ = argminc QN0(c)
Stage 1:wn,M = RM (un)− RM (0)
Stage 2:
QN0,M (c) =N0
∑n=1
[wn,M − µ(un, c)]2 → min
c

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Limit properties
TheoremIf
RM (un) = R(un) +O(M−τ) in probability, as M → ∞
then
cN0,M = c∗ +O(M−τ) in probability, as M → ∞.

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Two-stage identification of linear dynamics
ku kykz
kw( )μ ( )( )
1
1
B q
A q
−
−
kv
kε
{ } 0i iω ∞
=
Figure: Hammerstein system (parametric model of the linear component)
vk = b0wk + ...+ bswk−s + a1vk−1 + ....+ apvk−pθ = (b0, b1, ..., bs , a1, a2, ..., ap)T
ϑk = (wk ,wk−1, ...,wk−s , yk−1, yk−2, ..., yk−p)T
yk = ϑTk θ + zk , zk = zk − a1zk−1 − ...− apzk−pYN = ΘN θ + ZN , ΘN = (ϑ1, ..., ϑN )
T , ZN = (z1, ..., zN )T

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Nonparametric instrumental variables
θ(IV )N ,M = (Ψ
TN ,M ΘN ,M )
−1ΨTN ,MYN
where
ΘN ,M = (ϑ1,M , ..., ϑN ,M )T
ϑk ,M = (wk ,M , ..., wk−s ,M , yk−1, ..., yk−p)T
ΨN ,M = (ψ1,M , ..., ψN ,M )T
ψk ,M = (wk ,M , ..., wk−s ,M , wk−s−1,M , ..., wk−s−p,M )T

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Limit properties
TheoremIt holds that
θ(IV )N ,M → θ in probability
as N,M → ∞, provided that NM−τ → 0. In particular, forM ∼ N (1+α)/τ, α > 0, the asymptotic convergence rate is∥∥∥∥θ
(IV )N ,M − θ
∥∥∥∥ = O(N−min( 12 ,α)) in probability.

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Optimal instruments
∆(IV )N (ΨN ) , θIVN − θ∗ Z ∗N ,
1√NZN
zmax
Q (ΨN ) , max‖Z ∗N‖2≤1
∥∥∥∆(IV )N (ΨN )∥∥∥22
TheoremIt holds that
limN→∞
Q(ΨN ) > limN→∞
Q(Ψ∗N ) with probability 1
where Ψ∗N = (ψ∗1,ψ
∗2, ...,ψ
∗N )T , and
ψ∗k = (wk , ...,wk−s , vk−1, ..., vk−p)T .

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
NARMAX system
ku ky
kz
kw( )µ { }n
ii 0=γ
( )η { }p
jj 1=λkw'
kv
kv'
Figure: The NARMAX system
Λ = (λ1, ..,λp)T
Γ = (γ0, ...,γn)T
c = (c1, ..., cm)T
d = (d1, ..., dq)T

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Over-parametrization method
θ = (γ0c1, ...,γ0cm , ...,γnc1, ...,γncm ,
λ1d1, ...,λ1dq , ...,λpd1, ...,λpdq)T
= (θ1, ..., θ(n+1)m , θ(n+1)m+1, ..., θ(n+1)m+pq)T
φk = (f1(uk ), ..., fm(uk ), ..., f1(uk−n), ..., fm(uk−n),
g1(yk−1), ..., gq(yk−1), ..., g1(yk−p), ..., gq(yk−p))T
yk = φTk θ + zk YN = ΦN θ + ZN

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Two-stage estimate
Stage 1. Instrumental variables
θ(IV)N = (ΨT
NΦN )−1ΨT
NYN
Θ(IV)Λd , and Θ(IV)
Γc of the matrices ΘΛd = ΛdT and ΘΓc = ΓcT
Stage 2. Singular value decomposition (S.V.D.)
Θ(IV)Λd =
min(p,q)
∑i=1
δi ξ i ζTi Θ(IV)
Γc =min(n,m)
∑i=1
σi µi νTi
Λ(IV)N = sgn(ξ1[κξ1 ])ξ1
Γ(IV)N = sgn(µ1[κµ1])µ1
c (IV)N = sgn(µ1[κµ1])σ1 ν1
d (IV)N = sgn(ξ1[κξ1 ])δ1 ζ1

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Theorem
If det{EψkφTk } 6= 0 and Eψkzk = cov(ψk , zk ) = 0 then it holdsthat
Λ(IV)N → Λ
Γ(IV)N → Γ
c (IV)N → c
d (IV)N → d
with probability 1 as N → ∞.

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Summary
1 Consistent estimates under correlated excitations anddisturbances
2 Problem decomposition with the use of nonparametricmethods
3 Broad class of models (non-linear-in-parameters static blocks+ I.I.R. linear filters)

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Summary
1 Consistent estimates under correlated excitations anddisturbances
2 Problem decomposition with the use of nonparametricmethods
3 Broad class of models (non-linear-in-parameters static blocks+ I.I.R. linear filters)

Intro Single-elements Interconnected systems Hammerstein system NARMAX system Summary
Summary
1 Consistent estimates under correlated excitations anddisturbances
2 Problem decomposition with the use of nonparametricmethods
3 Broad class of models (non-linear-in-parameters static blocks+ I.I.R. linear filters)