Embed Size (px)
Citation preview

37INSTRUMENTATION VIEWPOINT- 18 - MARTECH 15 INSTRUMENTATION VIEWPOINT - 18 - MARTECH 15
ID20- AUTOMATIC READING OF INTERMODAL CONTAINERS ID NUMBERS(OWNERSHIP CODES)Fernando Martín-Rodríguez73,195, Xulio Fernández Hermida79, José Carlos Torres-Barragáns76
Abstract - This paper is about the design of an automated system to read the “Own-ership Code” [1] of intermodal containers as they are being loaded down from the ship. The system used machine vision with cameras attached to the crane to get im-ages of container to be processed. Usefulness of this system lies in the implementa-tion of an early detection system for handling errors. It is a huge problem that crane operator picks up the wrong container. If we discover it late, when the ship has gone, it becomes almost a catastrophe for the handler. Nowadays, there are human oper-ators checking manually the correctness of loading/unloading. This new system ar-rives to help them, generating alarms that could be issued before the crane releases its load. Human supervision will still be necessary but will become more effective.
Keywords: container, handling, machine vision, mathematical morphology, O.C.R.
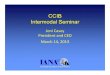
I.INTRODUCTIONAs we have commented at the abstract, our main aim here is the automatic reading of container ownership code. Cameras are to be installed in the han-dling cranes, so that we get as soon as possible images useful for recognizing the required number. With this number, we can check if that particular container was scheduled to be unloaded in our terminal and in the opposite case, we will issue an alarm for checking. If this indeed is an error, we can correct it before releasing the container from the crane (or, at least, shortly after). So this system gets an important efficiency improvement in the terminal work. We also get an important error protection measure.This system was jointly designed by “University of Vigo” and Tranformaciones Globales S.L.” (Transglobal Inc.) that is the corporation responsible for container handling at Vigo terminal. Cameras were attached to Transglobal’s cranes and test images belong to containers handled by them.The main camera is now placed in the side part of a crane, capturing images like that in figure 1. An electronic signal is issued by the crane to trigger camera system. Camera system is built by a commercial camera and an Odroid [2] com-puter. When the Odroid receives the trigger signal, a HD (1920x1080) image is captured.Crane also produces a TCP/IP connection that is used to inform the Odroid of the container size present in the image. Crane knows this information because of the position of its spreader (the part that claps the container). We are currently supporting the most frequent sizes: 20, 40 and 45 feet long.
II. IMAGE PREPROCESSINGAs software knows camera position and also container size, a region of inter-est (ROI) can be defined into the image so that the desired number appears in the new (smaller) image and in this manner we remove much of the unwanted information of the whole HD capture.In figure 2 (left) we can see the original image cropped to the defined ROI (de-fined for a 40 feet container from lateral camera). In the right we can see the same image where we have made a contrast enhancement via an automatic histogram stretching [3].
Fig 1. Example container photo, taken at the terminal.
Fig 2. ROI: original (left) and enhanced (right).

38 INSTRUMENTATION VIEWPOINT- 18 - MARTECH 15
At this point, image is ready to be processed.
IV. SEGMENTATIONFirst, image is analyzed to determine if we have bright characters in a dark back-ground or vice versa. This is performed through histogram analysis [3,4].Afterwards, mathematical morphology [3] is used to: first emphasize characters and afterwards to segment them. In figure 3, we show some stages of this pro-cess.The last image (figure 3, right) defines some rectangles that are “possible charac-ters”. Now, we must crop the corresponding sub-images from the enhanced ROI (figure 2, right) and a O.C.R. must determine if we have a true character and, in that case, recognize it. This process is aided by the fact that the true characters are always lined up (horizontally or vertically), making possible to remove some false ones now.
V. RECOGNITIONRecognition is performed by an open source O.C.R. We use “Tesseract O.C.R.” [5] with appropriate configuration. We provide Tesseract with individual, pre-seg-mented characters. Each is accompanied by an appropriate white list.
VI. CONCLUSIONSWe have implemented an automatic reader system for ownership codes of inter-modal containers. System is already functional and it is just now in the process of being integrated with the other terminal systems.
IV. REFERENCES[1] ISO 6346: standard defining ownership codes for intermodal containers.[2] http://www.hardkernel.com/main/main.php[3] R.C. González, R.E. Woods, “Digital image processing using MATLAB”, Steven L. Eddins, Upper Saddle River: Gatesmark Publishing, cop. 2009.[4] N. Otsu, “A Threshold Selection Method for Gray-Level Histograms”, IEEE Transac-tions on System, Man and Cybernetics, vol. 9, N.1 (1979).[5] https://code.google.com/p/tesseract-ocr/
(below) Fig 3. Segmentation process (left to right): enhancing, binarization [4] and segmantation.
Picture: Universidad Politécnica de Cartagena