Embed Size (px)
Citation preview
IAT 800
Braitenberg Vehicles
Oct 31, Fall 2006 IAT 800 2
Outline
Braitenberg vehicles– Concept behind vehicles– Introduce several vehicles– Look through major code sections– Talk about possible project ideas
Oct 31, Fall 2006 IAT 800 3
Braitenberg Vehicles
Valentino Braitenberg– Vehicles: Experiments in Synthetic Psychology– Neuro-psychologist interested in how primitive
neural structures can give rise to complex behavior
– He developed a simple model of robots with sensors and motors to show how complex behavior can arise from simple mechanisms
We're interested in his vehicles as a simple autonomous agent framework we can play with– Build ecosystems of interacting agents and
sensory sources
Dr. B’s homepage: http://www.kyb.mpg.de/~braitenb
Oct 31, Fall 2006 IAT 800 4
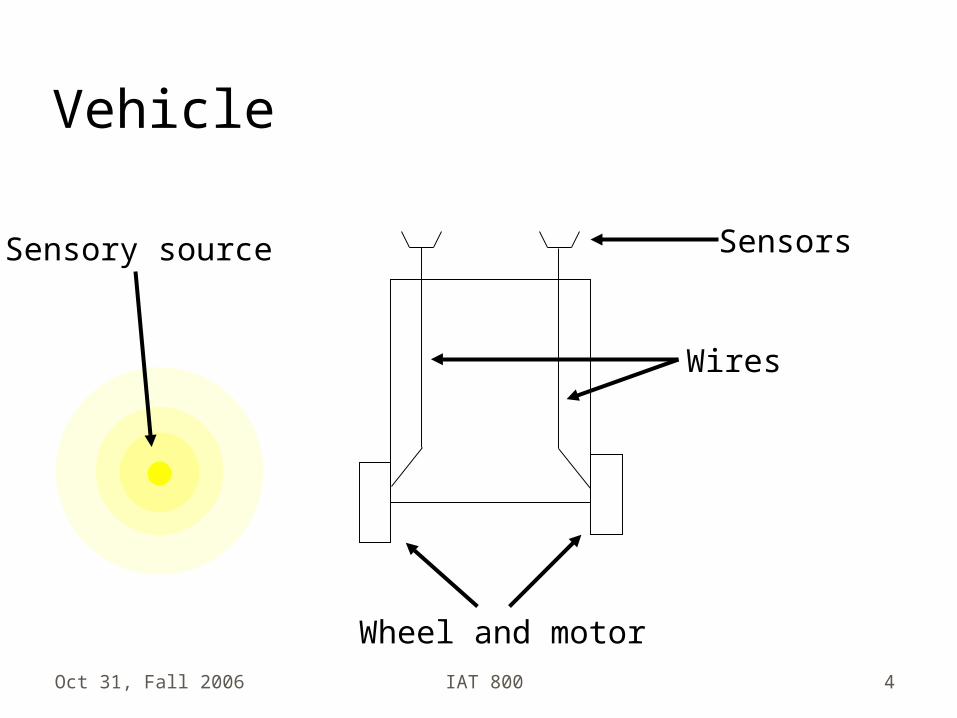
Vehicle
Sensors
Wheel and motor
Wires
Sensory source
Oct 31, Fall 2006 IAT 800 5
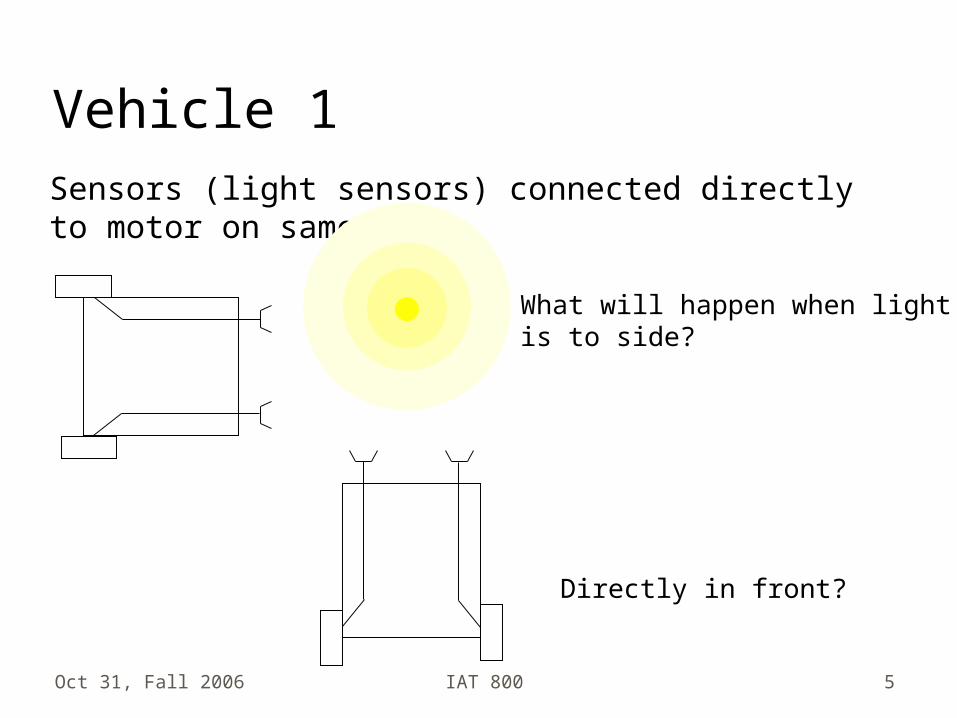
Vehicle 1Sensors (light sensors) connected directly to motor on same side
What will happen when light is to side?
Directly in front?
Oct 31, Fall 2006 IAT 800 6
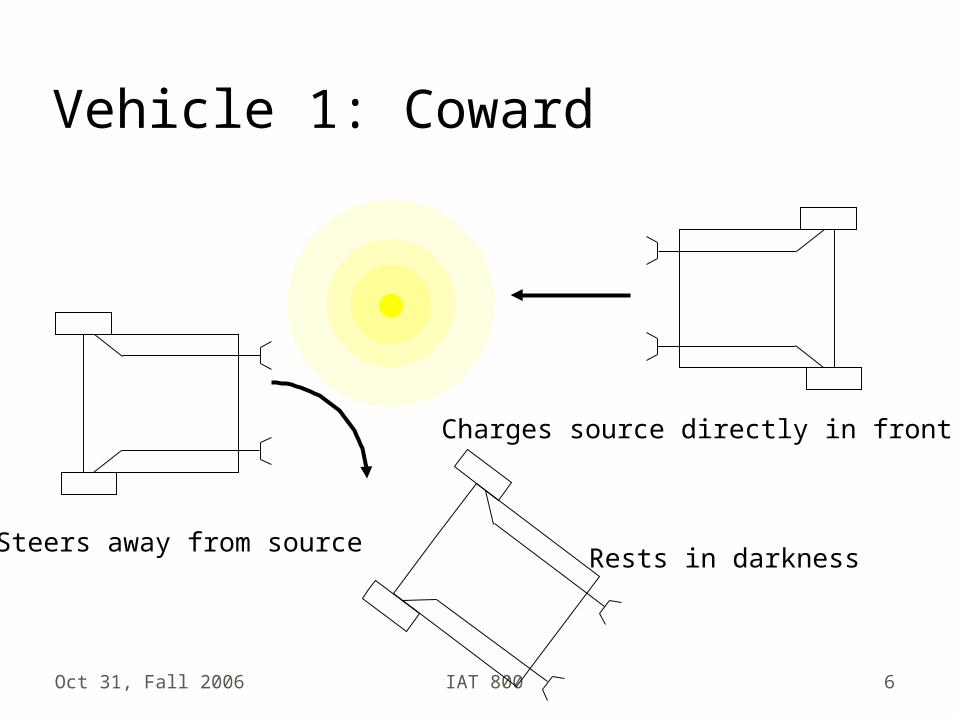
Vehicle 1: Coward
Steers away from source
Charges source directly in front
Rests in darkness
Oct 31, Fall 2006 IAT 800 7
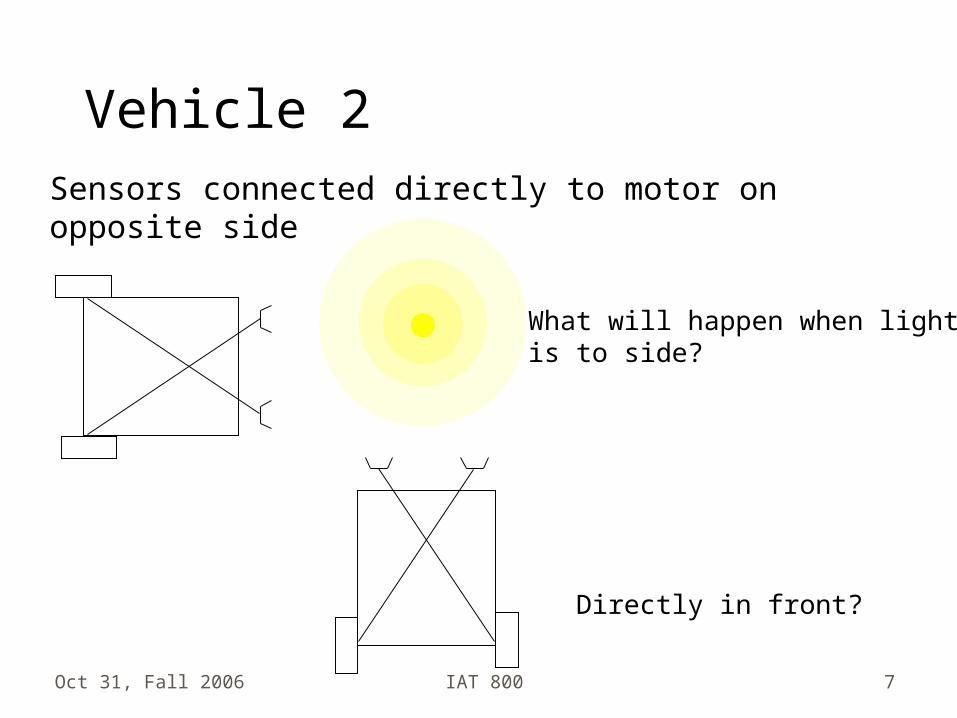
Vehicle 2Sensors connected directly to motor on opposite side
What will happen when light is to side?
Directly in front?
Oct 31, Fall 2006 IAT 800 8
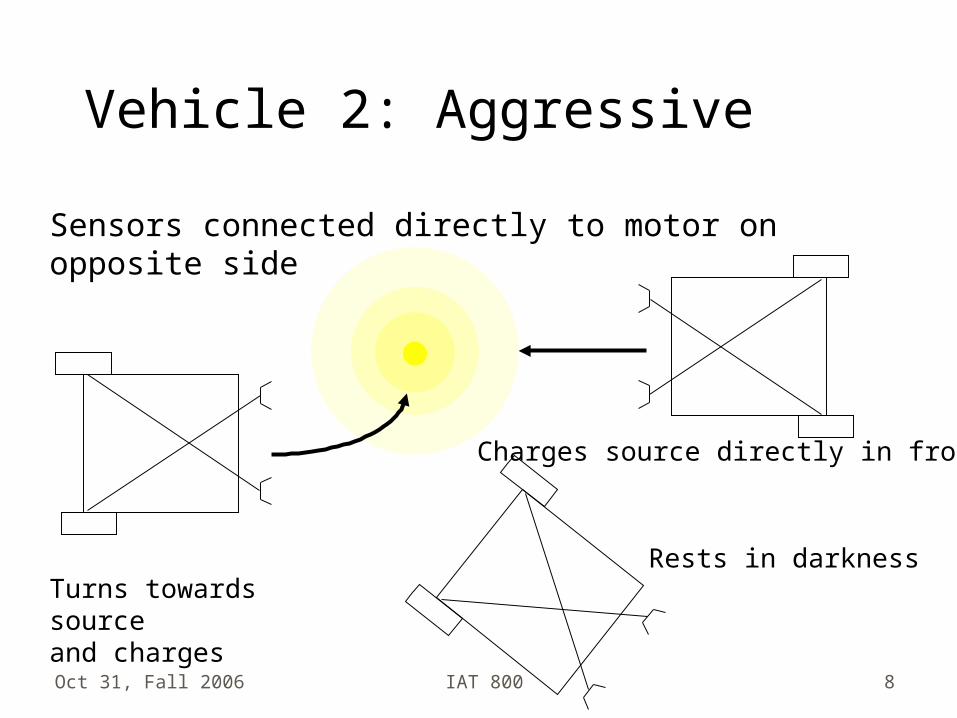
Vehicle 2: Aggressive
Sensors connected directly to motor on opposite side
Turns towards sourceand charges
Charges source directly in front
Rests in darkness
Oct 31, Fall 2006 IAT 800 9
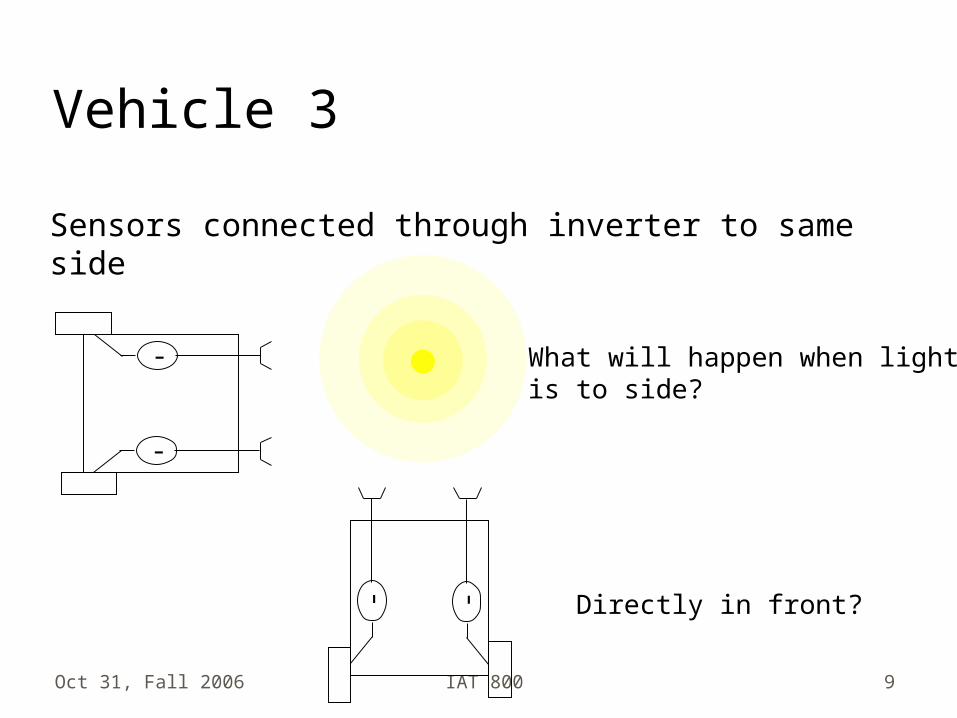
Vehicle 3
Sensors connected through inverter to same side
What will happen when light is to side?
Directly in front?
-
-
- -
Oct 31, Fall 2006 IAT 800 10
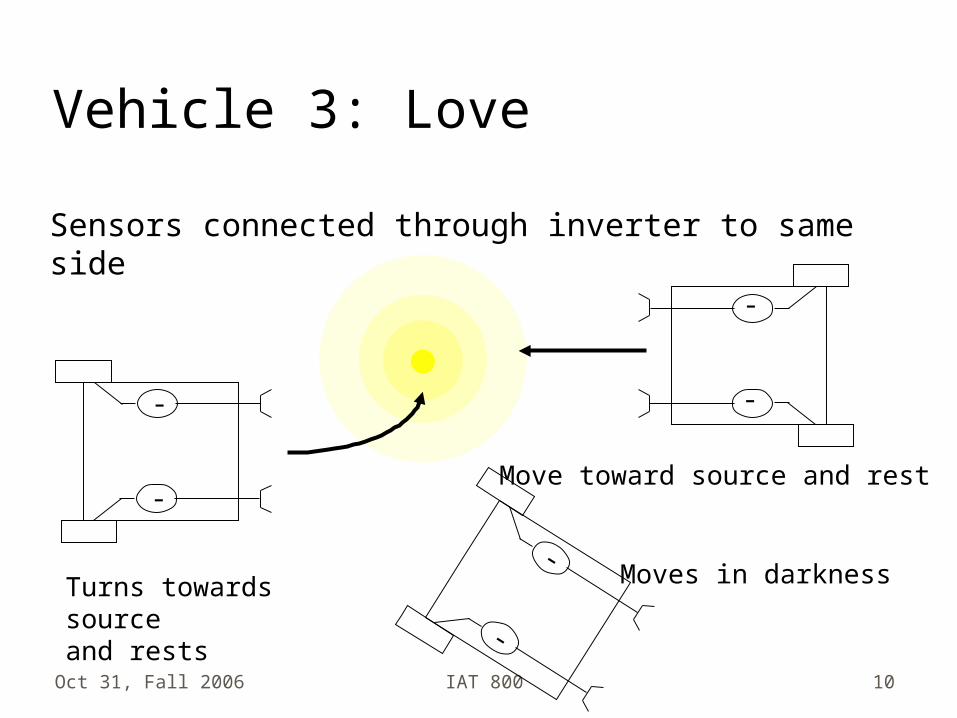
Vehicle 3: Love
Sensors connected through inverter to same side
-
-
-
-
Turns towards sourceand rests
Move toward source and rest
Moves in darkness-
-
Oct 31, Fall 2006 IAT 800 11
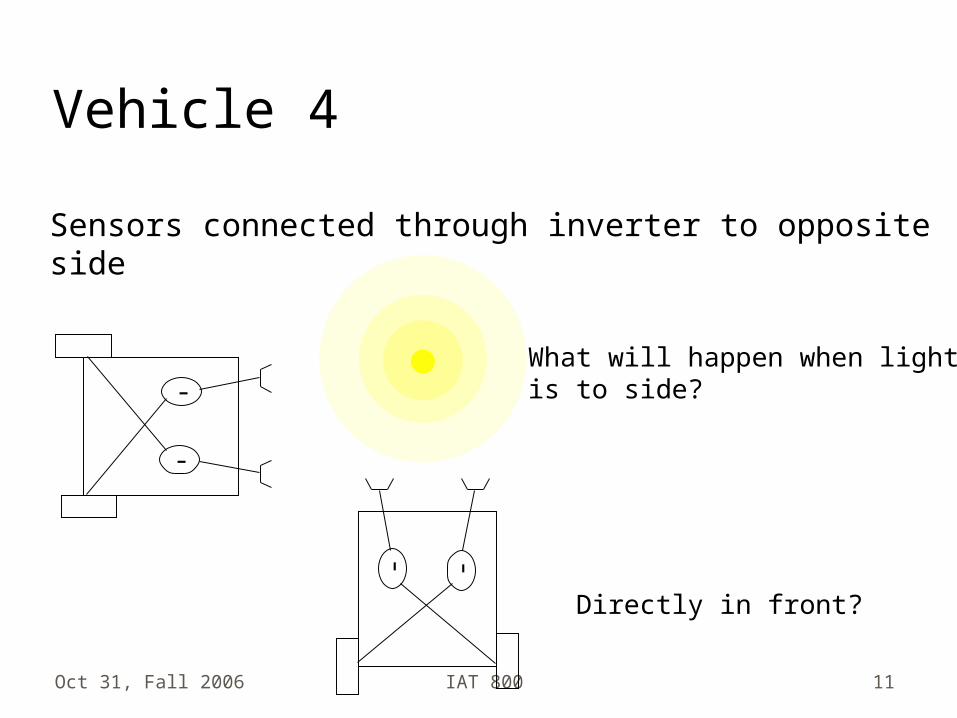
Vehicle 4
Sensors connected through inverter to opposite side
What will happen when light is to side?
Directly in front?
-
-
- -
Oct 31, Fall 2006 IAT 800 12
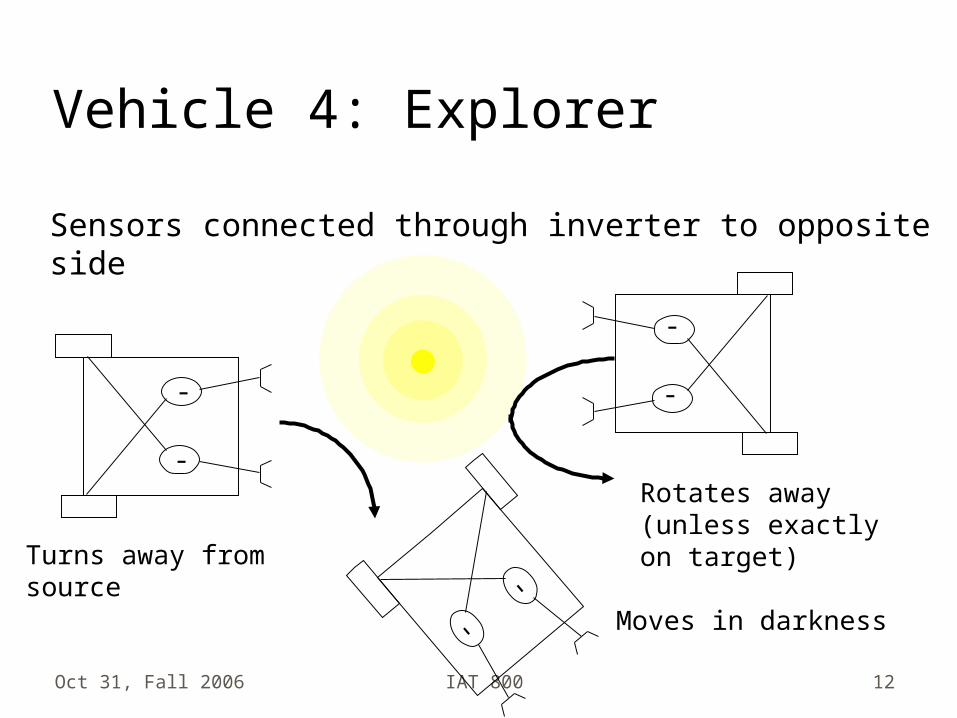
Vehicle 4: Explorer
Sensors connected through inverter to opposite side
-
--
-
-
-
Turns away from source
Rotates away (unless exactly on target)
Moves in darkness
Oct 31, Fall 2006 IAT 800 13
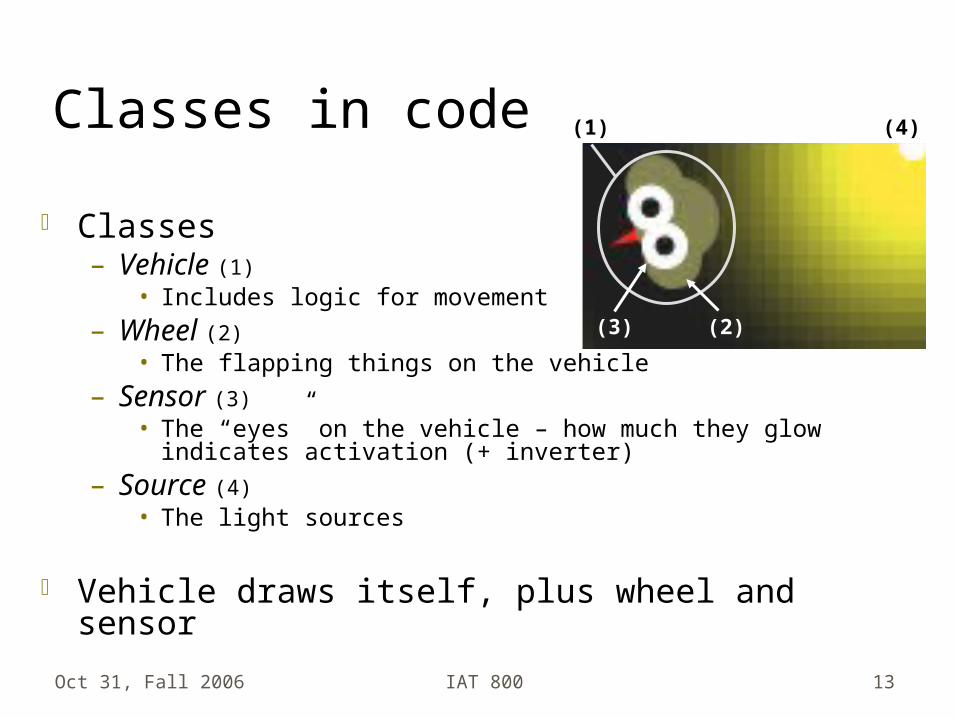
Classes in code
Classes– Vehicle (1)
• Includes logic for movement– Wheel (2)
• The flapping things on the vehicle– Sensor (3)
• The “eyes” on the vehicle – how much they glow indicates activation (+ inverter)
– Source (4)• The light sources
Vehicle draws itself, plus wheel and sensor
(1)
(2)(3)
(4)
Oct 31, Fall 2006 IAT 800 14
Vehicles All vehicles are currently vehicles of the same type– Initialized in setup()
• Up/down arrow displays/hides vehicles
– To create multiple types of vehicles, subclass Vehicle instead of commenting in and out different doSenseLogic() methods
Draw() repeatedly calls move() and drawMe() methods on vehicle– To change the way the vehicle looks, change the drawMe() methods
– move() contains call to doSenseLogic(), which contains the relationship between sensors and wheels
Oct 31, Fall 2006 IAT 800 15
Ground
The ground (background) is a PImage - different sources change the pixels of the ground
This is the mechanism for summing different sources together– updateGround() sums light sources to produce background pixels
Sensing takes place by asking the ground what the summed sense value is (rather than by directly asking the sources)
Ground will need to be modified to handle multiple source types– Separate by color (r, g, b), but then can only have three– Better – lay multiple sensory grounds on top of each other
• Transparency will make them all visible• Different sensor types will look at different grounds (sound, light
sources, etc.)
Instead of PImage, we will make a 2D array for ground instead(drawing optional => MUCH FASTER on slower machines!)
Oct 31, Fall 2006 IAT 800 16
Sources
The only source currently implemented is light sources– Strength determines brightness– Max_radius determines how far out influence extends
Sources only draw the little circle in the middle – The light gradient around them is actually in the ground
getReading() is used by ground to sample a light source (to determine how much a light source effects a given pixel)
Oct 31, Fall 2006 IAT 800 17
Extensions
Make vehicles also be sources (vehicles start following each other, are repelled by each other, etc.)
Implement other sources (e.g. sound, smell…), other objects in the world
Add more complex sensor response curves (everything we’ve looked at so far is linear)
Add more interactions between different types of vehicles
Oct 31, Fall 2006 IAT 800 18
Project ideas
Braitenberg vehicles provide a simple framework for exploring autonomous behavior in computational ecosystems
Text machines – autonomous words and letters
Drawing machines – brush interacts with vehicles, spawns vehicles, vehicles interact with each other
Ecosystem responds to data (sources represent web data, vehicles spawned in response to data, etc.)
Miniature worlds – alien, aesthetically interesting worlds





























