Embed Size (px)
Citation preview
RD-I65 146 NONLINER ELSTIC ND INELSTIC NLYSIS OF STRUCTURL /1I NMEMBERS IN THE PRE.. (U) YIRGINIA UNIV CHARLOTTESVILLE
'5 DEPT OF MECHANICAL AND, AEROSPAC.. R D PILKEY 20 DEC 85I UNCLSSIFIED UV/5-25387/NAE86ii61 NSD614-93-1(6392 F/G 20/11 NL
1*6
1. 114-'
L3.6111 11102.0
11111 l r) T~)~lS11-
%.F.1

.e.
Q.
SNonlinear Elastic and Inelastic Analysisof Structural Members in the
a Presence of High Temperature and Creep
DTIC
Final Report --
ONR Contract Number: N00014-83-K-0392
ONR Work Unit Number: 064-542
Walter D. PilkeyPrincipal Investigator
Submitted to
ONR Mechanics DivisionAlan Kushner, Scientific Officer
\December 1985
86 3 7 091
iit1 c if -A
SECURITY CLASSIFICATION OF THIS PAGE r11REPORT DOCUMENTATION PAGE
III. REPORT SECURITY CLASSIFICATION 1b. RESTRICTIVE MARKINGSunclassified
* 2& SECURITY CLASSIFICATION AUTHORITY 3. DISTRIBUTION/AVAILABILITY OF REPORT
21. OECLASSIFICATION/OOWNGRAOING SCHIEDULEunite .
A. PFAOMN ORGANIZATION REPORT. NUSRS $/i MONITORING ORGANIZATION REPORT NUMBER(SI
UVA/ 5-25387/MAE 6 /101
G& NAME OP PERFORMING ORIGANIZATION III. OFFICE SYMBOL 7& NAME Of MONITORING ORGANIZATION
* Department of Mech & Aero Eng (lahi.I)ONR, Mechanics DivisionUNiversity of Virg~inia _______ ______________________
6 C. ADDRESS (City. S91ft 40d ZIP Code) 7b. ADDRESS (City. Stae mul ZIP Code)
* Charlottesville, VA 22901 RO- lgn~y sr: 2 2
- So. NAME OFPFUNOING/SPONSORING Sb. OFFICE SYMBOL 9. PROCUREMENT INSTRUMENT IDENTIFICATION NUMBER%* ORGANIZATION (if aplicable)
ONR NOQ0l 4-83-K-0392
SC. ADDRESS (City. Statt ad ZIP Code) 10. SOURCE OF FUNDING NOS.
PROGRAM PROJECT TASK WORK UNIT0MR work unit number - 064-542 ELEMENT NO. No. NO. NO.
* 11. TI TLE (Include Secuity Clam, fetittn) 3* Nonlinear Elastic and Inelastic Analysis of S1______ ________________
* 12. PI RSONAL AUTNO A(S)Walter D. Pilkey
13&. TYPE OF REPORT j13b. TIME COVERED 114. OATS OF REPORAT I Y.. Mo.. Day) 15. PAGE COUNTFinal 1 FROM 1/10/84 To 30/9/85 December 20, 1985 12
14. SUPPLEMENTAR Y NOTATION
17. COSATI COCIES IL. SUBJEC'T TERMS (Continue on eege igi negmnw7 a"d identify by block OviubeeI
UIELD GROUP SUB. GA. _oElastic analysis; optimal design,,Inelastic analysis,; high temperature,Creep configurationless design
is. ABSTRACT (Continue an ou..rse if necee#ry and idenltify by block number)
- -- '-This research began with a mixed principle based creep analysis and was later redirected to a study
of limiting performance methodolo gy, Including a formulation for the limiting peformance analysisLof large systems. The formulations for dynamic systems apply to problems for which such variablesas maximum displacements or stresses, relative displacements, peak velocities or accelerations areof concern. 4
20. OISTRIBUTION/AVAiLASILITY OF ABSTRACT 21. ABSTRACT SecunRy CLASSIFICATION
* UNCLASSIPI60/UNLIMIO M SAMS AS P?. Q3OTIC USERS 03 unclassif led
* 22& NA-1 OF RESPONSIBLE INDIVIDUAL 22b. TELEPHONE NUMBER 2e FIESMODr AlnKuhe (include -A,, CodopPC SMO
Or Aa (202) 696-4307 OF2
00 FORM 1473.,It, APR7_ EDITION OF I JAN 73 IS OBSOLETE. unclassified
SACURITY CLASSIFICATION OF THIS P546
-. . *
ABSTRACr
This research began with a mixed principle based creep analysis.Then the work was redirected to a study of limiting performancemethodology, including a formulation for the limiting performanceanalysis of large systems.
L. INTRODU O,
The usual design of dynamic systems, e.g., shock and vibration-
* isolation systems for ship foundations, requires the a priori choice of
a particular system of fixed configuration. The structural elements
'"forming the chosen system are then optimized to meet prescribed criteria.
The possibilities for optimization are limited, however, by the class of
Selements selected at the outset.
The concept and value of configurationless or true optimal design
of dynamic systems have often been recognized by the designer but almost
Snever successfully implemented, especially for large-scale systems. The
proposed formulations for dynamic systems, e.g., isolation systems, will
.!apply to problems for which such variables as maximum displacements or
stresses, relative displacements, peak velocities or accelerations, etc.
are of pacing concern. It is plausible that other optimal design
* criteria such as minimuhm weight can be incorporated.
II. FOP14ULATION
Ideally, system design should follow directly from the design
criteria with no a priori comnitment on the designer's part to a
particular design configuration. In practice, of course, this is not
achieved. A procedure is sketched here for the confirgurationless study
*-of large systems subject to dynamic loading.
2
For a multidegree of freedom system with multiple " "
configurationless elements, the equations of motion become
[m]{xl + [c]{x} + [k]{k} + [U]{u} - [F]{f} (i)
where LU]{u} contains that portion of the system being designed. These
relationships require linear global kinematics, but no linearity
requirements are placed on the elements being designed. These elements
can be considered to be active vibration isolation elements.
The problem is to compute {.uJ such that certain design objectives .
are achieved. Subsequently, it is possible that system identification
procedures can be used to select (design) the near-optimal isolation
system.
More specifically, the systems design problem of interest here is
one where we choose portions of the system such that a performance index
I of certain reponses hr is extremized and certain response constraints
ck are satisfied. Typically, the problem is to find {u} such that
= max h (2)r
is minimized subject to
Ck S (3) "%
where the bounds on the constraints are prescribed.
The calculation of (u}, suc~h that the optimization problem is
satisfied, can be formulated as a linear programming problem. To
observe this, note that the objective function (2) is equivalent to
• imposing the constraint 03
Ihrl < for all t (4) ..............The problem is now to minimize v subject to the constraints
-wlhl < r 12f ... (5)• - -ity Codesv as well as the constraints of Eq. (3)..alo
. . . . . . . .. . • - ,. --, -, - - - -. .,-'. . .... .. ..... .. ... . .. . -- "-." " " " ":7.. -an -- --I or
.7 k7 -. 7 70
|3 ". ___-
3-
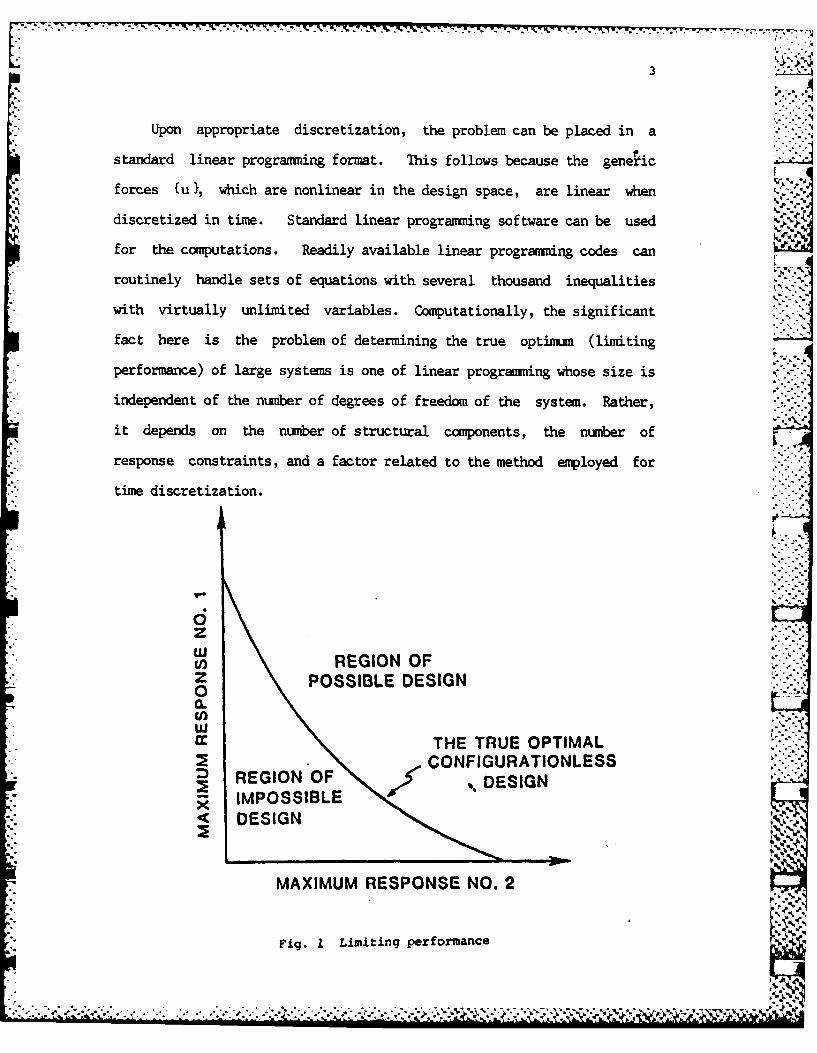
Upon appropriate discretization, the problem can be placed in a
standard linear programming format. This follows because the genetic
forces {u }, which are nonlinear in the design space, are linear when
discretized in time. Standard linear programming software can be used
for the computations. Readily available linear programming codes can
routinely handle sets of equations with several thousand inequalities
with virtually unlimited variables. Computationally, the significant.35]
fact here is the problem of determining the true optimum (limiting
performance) of large systems is one of linear programming whose size is
independent of the number of degrees of freedom of the system. Rather,
it depends on the number of structural components, the number of
response constraints, and a factor related to the method employed for
time discretization.
W REGION OFZ POSSIB3LE DESIGN0
RF CONFIGURATIONLESSREGION OF DESIGN, PIMPOSSIBLESI DESIGN
MAXIMUM RESPONSE NO. 2
Fig. I Limiting performance
p.......;
I 4
A typical result for a limiting performance study is shown in Fig.
1, where a tradeoff between two peak responses (one a performance
function and the other a constraint) is illustrated. The value of such
information is clear. It is not possible, regardless of configuration,
to design an isolation system with performances below the true optimalg .. , . ".
curve. The actual design configuration can be sought as a second step
in the design process such that its response approaches that of the true
optimal response. Both passive and active configuration can be
considered. For steady state problems, one axis of the limiting
performance curve of Fig. 1 may portray frequency.
The study done under this grant concentrated on the formulation of
this problem for large scale systems represented by finite element
models.
III. SUMMARY OF WORK PERFORMED
A. Numerical Solution for Creep Problems
A new simpler solution procedure was devised for the finite elementanalysis of creep problems. The creep strains were eliminated ascomputation variables. At each time step a system is solved for thestresses and velocities alone. This is in contrast to the usualtechnique, such as used in ADINA, which solves for the stresses, creepstrains, and displacements at each time step. In numerical tests thisnew procedure has been significantly faster than the techniques used inADINA. See Publication No. 1.
B. A Modal Aproach for the Formulation of the LimitingNitformance Problem
The limiting performance problem is formulated in terms of the modalresponse of a system. This permits truly large systems, for whichanalytically or experimentally determined modal characteristics are "available, to be handled. This sets the stage, for example, forcoupling a limiting performance study to a shock isolation system beingdesigned with the Navy's DDAM procedures. This limiting performance
* formulation is implemented using linear programming, which does notimpose linearity on a control force yet permits a problem of immensesize to be solved. See Publication No. 4.
%%%-..'..
C. Development of Equations of Motion of the Limitin
Perormanc eStuy o Complex Systems 'nc&udi seFormed of Subsystems Iv
This effort addressed the problem of preparing limiting performancegoverning differential equations when control forces are embedded in alarge system or when the control forces connect subsystems for which,nodal characteristics are available. This expands the capability oflimiting performance to include larger and more complex systems, such asthose performed by several systems. See Publication No. 2. ,
D. Modal Representation of Control Forces
The size of the computational solution of a limiting performanceproblem does not depend on the number of degrees of freedom of thesystem. Rather, it is a function of the number of constraints and themanner in which the generic forces are discretized. This is a study ofthe effect of replacing time disretization of the generic forces with atime series representation based on the natural frequencies of thesystem. Implementation of a formulation such as this can substantiallyreduce the computational burden of a limiting performance solution. SeePublication No. 3.
E. Analytical Determination of the Limiting Performance
This is the development of a graphical solution for the limitingperformance of single-degree-of-freedom systems. Such an analyticalapproach permits an in-depth study of the characteristics of limiting -performance, such as the effect of different excitations. For example, asensitivity study can be performed of the improvement in responseachieved if there is some knowledge beforehand of the excitation.
IV. INDEX OF PUBLICATIONS
1. "An Improved Solution Procedure for Creep Problems", to appear,International Journal of Numerical Methods in Engineering, 1986'
2. "Application of Limiting Performance Concepts to StructuralControl Problems", Chapter in Structural Control, Ed: H.H.E. Leipholz,North-Holland, N.Y., 1985.
3. 'limiting Performance of Transient Systems by a Modal Analysis,Modal Control Approach", submitted for publication.
4. 'limiting Performance of Shock Isolation Systems by a ModalApproach", to appear Eart e Engineering and Structural Dyamics,1986.
5. "A Direct Method for Estimating Lower and Upper Bounds of theFundamental Frequency", Shock and Vibration Bulletin, 1985.
I-k -F"'e e- ' e. '' , " , " ," ..- -- , •-- . .,
P.~~~'~ 7-.I .....'W.W
DISTRIBUTION LIST *~fj
15 Alan Kushner ONR -
6 OSP7 SEAS Administration8-9 W.D. Plkey10 L. MansfieldI1I SEAS Publication files
ONR Structural Mechanics Distribution List (attached)
S..
ONR Distribution List - Structural Mechanics
Office of Naval Research800 N. Quincy StreetArlington, VA 22217Attn: Code 432 (4 copies)
Defense Documentation Center (12 copies)Cameron StationAlexandria, VA 22314
Naval Research LaboratoryWashington, DC 20375Attn: Code 6370
Code 6380Code 5830Code 6390Code 2620
David W. Taylor Naval Ship Researchand Development Center
Bethesda, MD 20084Attn: Code 1700
Code 1720Code 1720.4Code 1844
Naval Air Development CenterWarminster, PA 18974
*Attn: Code 6043Code 6063
Naval Surface Weapons CenterWhite Oak, MD 20910Attn: Code K20
Code R13Technical Library
Naval Surface Weapons CenterDahlgren, VA 22448Attn: Technical Library
Naval Underwater Systems Center
New London, CT 06320Attn: Code 44
Technical Library
Naval Underwater Systems CenterNewport, RI 02841Attn: Technical Library
.
Naval Weapons CenterChina Lake, CA 93555Attn: Technical Library
Chief of Npvpl Cperations -Department of the NavyWashington, DC 20350Attn: Code OP-098
CommanderNaval Sea Systems CommandWashington, D.C. 20362Attn: Code 05R25
Code 05R26Code 55YCode 55Y2
CommanderNaval Air Systems CommandWashington, DC 20361Attn: Code 03D
Code 7226Code 310ACode 310B
U. S. Naval AcademyMechanical Engineering DepartmentAnnapolis, MD 21402
Naval Postgraduate SchoolMonterey, CA 93940Attn: Technical Library
Mr. Jerome PershStaff Specialist for Materials and StructuresOUSDR&E, The PentagonRoom 3D1089 ,,'.Washington, DC 20301
Dr. CLifford AstillSolid Mechanics ProgramNational Science FoundationWashington, D.C. 20550
Dr. A. AmosAerospace Sciences DirectorateAir Force Office of Scientific ResearchBolling Air Force BaseWashington, DC 20332
N:
. . . . .. . . . .. . . . . ... . . . . . . . . . . ...... . . . . . .'
N.* .. *.. *

Professor J.C.S. YangUniversity of MarylandDepartment of Mechanical Engineering e -e
College Park, Maryland 20742
Professor J.F. AbelCornell UniversityDepartment of Theoretical and Applied MechanicsIthica, New York 14853
Dr. R.D. MindlinP.O. Box 385Grantham, NH 03753
Dr. T.L. GeersLockheed Missiles and Space Company3251 Hanover StreetPalo Alto, California 94304
Professor R.L. PlunkettUniversity of MinnesotaDepartment of Aerospace Engineeringand Mechanics
Minneapolis, Minnesota 55455
Professor A.R. RobinsonUniversity of IllinoisDepartment of Civil EngineeringUrbana, Illinois 61803
Dr. R.S. DunhamAnatech International Corp.3344 North Torrey Pines CourtSuite 320LaJolla, CA 92037
Professor S.W. LeeUniversity of MarylandDepartment of Aerospace EngineeringCollege Park, MD 20742
Dr. R.F. JonesDavid W. Taylor Naval Ship R&D CenterCode 172Bethesda, MD 20084
. . . . . .
... . . .. . ... ... ....... . II. .. Ill / .. . . .. I
J
Professor J.T. OdenUniversity of Texas at AustinDepartment of Aerospace Engineering and 1
Engineering MechanicsAustin, Texas 78712-1085
Professor P. PinskyStanford UniversityDepartment of Civil Engineering ... 1Stanford, CA. 94305
Professor T.J. R. HughesStanford UniversityDivision of Applied MechanicsStanford, CA 94305 -. .
Dr. Harold Liebowitz, DeanSchool of Engineering and Applied ScienceGeorge Washington UniversityWashington, DC 20052
Professor B. BudianskyHarvard UniversityDivision of Applied SciencesCambridge, MA 02138
Professor S.N. Atluri ..
Georgia Institute of TechnologySchool of Engineering and MechanicsAtlanta, GA 30332
Professor P.G. Hodge, Jr.University of MinnesotaDepartment of Aerospace Engineering and MechanicsMinneapolis, MN 55455
. '
'i". d

* ~
UV~*~- .~. 4.
..
4~. *4'*
4. i '.-..
4....,1.'-~-**
"4
1 .4--.
2- '-* ~-
.4-,
'V
FILMED".4
-~ 1~*'~- ,1~.4 4'- 4--.
.4..
~
V4r~~
~4
4 DTIC'4 4~ "~'~ -
* 4.... . .**- **.* *' ~... '















