Embed Size (px)
DESCRIPTION
octacopter design by alex
Citation preview
HYBRID OCTACOPTER PROJECT
PREAMBLE.
During the last few years the improvement of the control technology resulted in the appearance of smaller, more powerful and less expensive IMU (inertial measurement unit) and control units for aerial flight. This fact added to a significant improvement of the battery life and a decreasment of its weight with the LIPO technology had made possible the emergence of many new devices designed for operate in the airspace and exploit the possibilities of this underused space as never before.
Due to the emerging technologies related with the UAVs (unmanned aerial vehicles) and the niche market that this new devices open ahead us it's a must for any robot and/or first line technologies company to study the possibilities of taking advantage of this moment.
The aim of this research is to find a possible solution for the designing of a multi rotor UAV with high time flight and good stability and flight characteristics.
INTRODUCTION AND PRESENT SCENARIO.
At the present moment the market is starting to provide a wide range of devices as each time more and more companies decide to take advantage of the niche market.
The UVA design that has improved and grown up more in either designs and added features is the multi rotor system. This system gives the advantages of an Helicopter, like taking off and landing in a very small space and the possibility of remaining virtually static in a point of the space, but with an improved stability, which makes easier performing other actions like taking photos or recording videos.
At the present moment the main disadvantage for those systems is the short operating time: since they use brush less motors for lifting and controlling the UVA and those motors have a high current consumption added to the fact that Lipo batteries have a limited capacity those systems can not be designed for higher times. In other words, the fly time is limited due to the battery capacity.
After a deep research on the net we have found several options in the market that provide electric multi rotor for different proposals:
Microdrones:
md4-200 UAV platform with 35 minutes flight time and 200g payload. Rain and dust resistant.
Price starts from € 20,000.
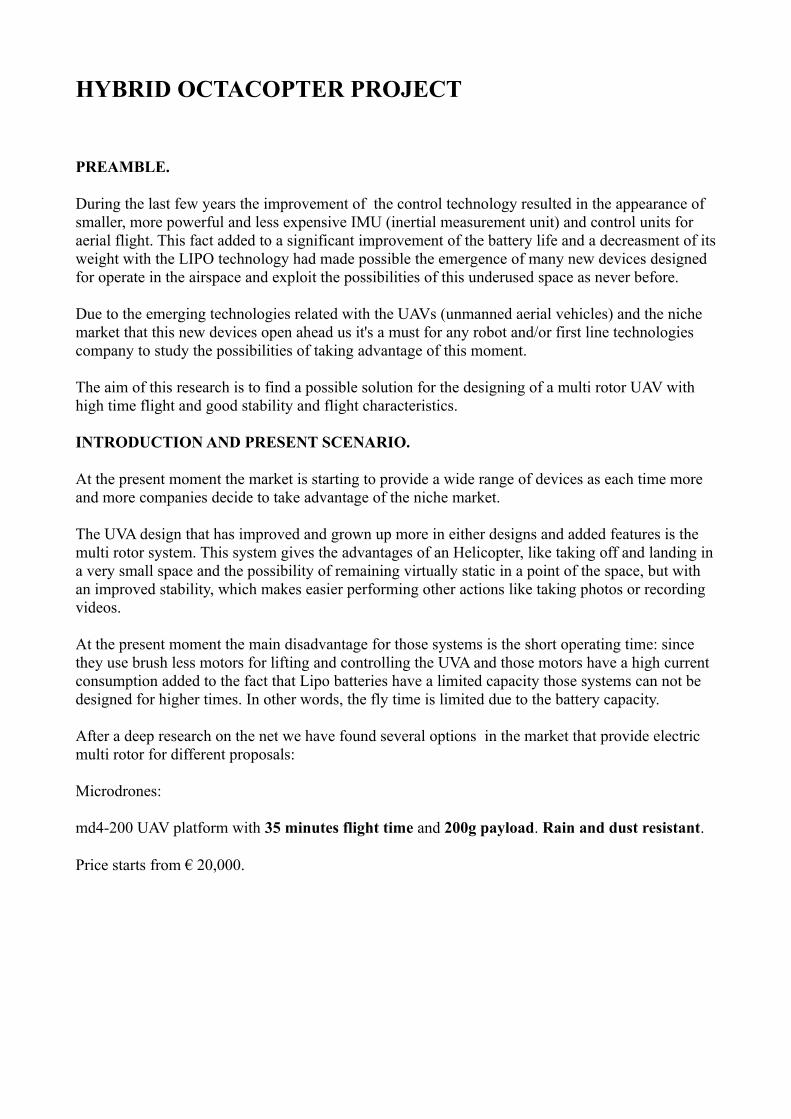
md4-1000 UAV platform with 88 minutes flight time and 1200g payload. Rain and dust resistant.
Price starts from € 40.000
(http://www.microdrones.com/purchase/purchase-a-microdrone-platform-at-microdrones.php)
SteadiDrone EI8HT RTF
Payload - ideal 1kg to 6kg / max 10kg (over and above drone weight)Speed - zero up to 70km/h (depends on payload) / Range - up to 1.5kmFlight Time - up to 15min (depending on payload, batteries, props, weather, altitude etc)Dimensions - diameter 1200mm / width 1100mm / height 415mm / weight 4.8kg (no battery) - See more at: http://uavdronesforsale.com/index.php?page=item&id=248#sthash.tivKfuvk.dpuf
9950.00 Dollar US$
Zero Steadicam470
746.00 Dollar US$
1: Max take-off weight: 2.8kg
2: Max valid payload: 300-400g(Sony 5N, Panasonic GH2)
3: Hover time: 18 mins(no-load), 10-12 mins(full load)
4: Cruise speed: 10.2m/s max
(http://uavdronesforsale.com/)
More information can be found in the net but as far as we have seen the prices vary between 600$ up to 40.000€, depending on several factors being the two most important max valid payload and max fly time.
We'd like to recall your attention over this point: The hovering time only refers to the multi rotor staying in the same place without movement or payload. For the microdrones product md4-1000, for example, 88 minutes is for hovering and without payload, once you add some payload and supposing you use it for moving around, the max fly time will decrease to 40-45 minutes if not less.
A part from the listed professional UAVs there is an almost limitless amount of information regarding to hobby projects related with multi copters or drones.
Even though all projects seem to have the same problematic at the time of achieving long flying times due to the limitations listed above there has been other ways of facing the problem with relatively success. The most interesting example is the hybrid pentacopter.
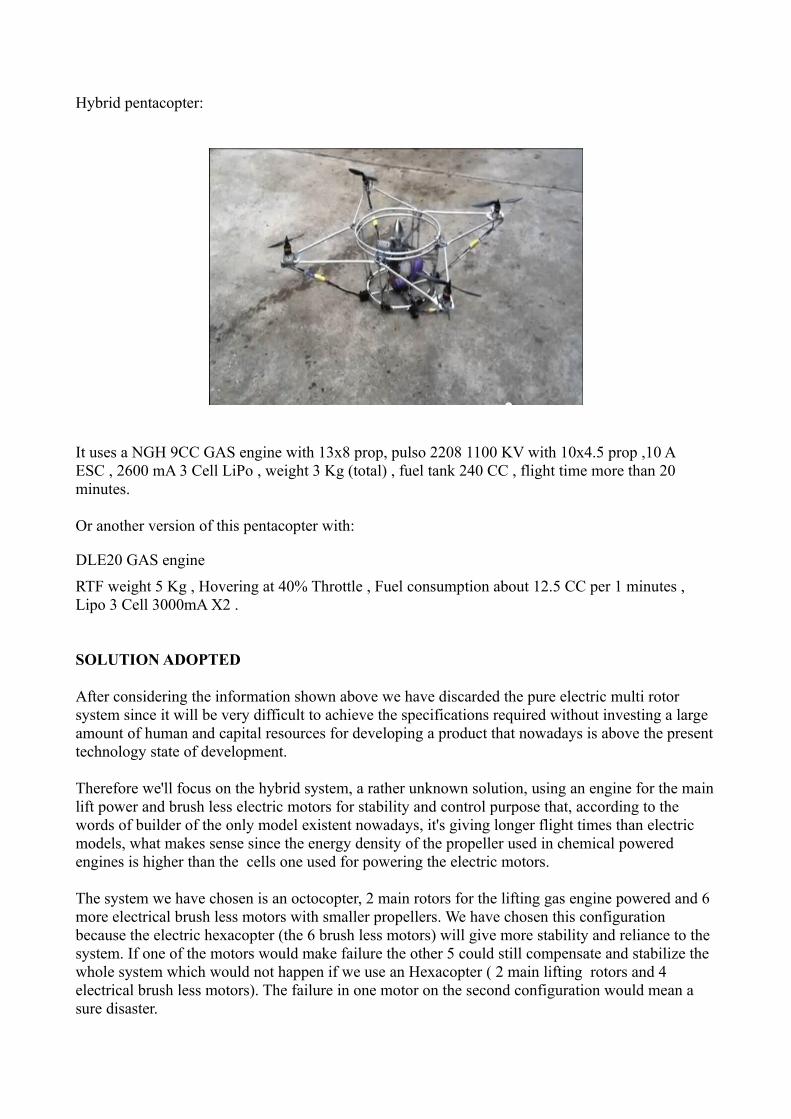
Hybrid pentacopter:
It uses a NGH 9CC GAS engine with 13x8 prop, pulso 2208 1100 KV with 10x4.5 prop ,10 A ESC , 2600 mA 3 Cell LiPo , weight 3 Kg (total) , fuel tank 240 CC , flight time more than 20 minutes.
Or another version of this pentacopter with:
DLE20 GAS engine
RTF weight 5 Kg , Hovering at 40% Throttle , Fuel consumption about 12.5 CC per 1 minutes , Lipo 3 Cell 3000mA X2 .
SOLUTION ADOPTED
After considering the information shown above we have discarded the pure electric multi rotor system since it will be very difficult to achieve the specifications required without investing a large amount of human and capital resources for developing a product that nowadays is above the present technology state of development.
Therefore we'll focus on the hybrid system, a rather unknown solution, using an engine for the main lift power and brush less electric motors for stability and control purpose that, according to the words of builder of the only model existent nowadays, it's giving longer flight times than electric models, what makes sense since the energy density of the propeller used in chemical powered engines is higher than the cells one used for powering the electric motors.
The system we have chosen is an octocopter, 2 main rotors for the lifting gas engine powered and 6 more electrical brush less motors with smaller propellers. We have chosen this configuration because the electric hexacopter (the 6 brush less motors) will give more stability and reliance to the system. If one of the motors would make failure the other 5 could still compensate and stabilize the whole system which would not happen if we use an Hexacopter ( 2 main lifting rotors and 4 electrical brush less motors). The failure in one motor on the second configuration would mean a sure disaster.
A part from that 6 brush less motors will give 1/3 plus of lift power on the electrical side, if the engine will suddenly fail or run out of gas the remaining 6 motors would eventually be able to save the multi rotor.
STUDY AND DESIGN
Propellers.
At the time of choosing the propeller we have take in consideration as main factor the efficiency, being Propeller efficiency the ratio of the thrust power output to the engine power input.
The work done (the energy expended) by the propeller is the kinetic energy imparted to the slipstream = ½mv², so less energy is expended if the mass (of the air) is increased and the velocity decreased.
Thus, the most efficient system is to utilize the greatest propeller diameter possible at lowest rpm.
Searching for the greatest diameter possible fitting in our design we found restrictions due to the the fact that the market offer a wide range of propellers for aircrafts but the offer for multi rotor propellers hasn't grown up during this last years that much and the choices are limited.
Since we need a cw and ccw pair propellers, we found that the biggest diameter in the market was 18x5.5 inch (http://www.goodluckbuy.com/1855-18x5-5-carbon-fiber-propeller-prop-cw-ccw-for-quadcoptor-multicopter-dji-style-2-pair-.html), 17x5.5 inch (http://tienda.stockrc.com/17x55-Carbon-Fiber-Props-pair-Slow-Fly) and 16x5.5 (http://tienda.stockrc.com/16x55-Carbon-Fiber-Props-pair-Slow-Fly/en and http://www.goodluckbuy.com/1655-16x5-5-carbon-fiber-propeller-prop-cw-ccw-for-quadcoptor-2-pair-.html).
After matching the few information found in the net regarding to this propellers, a first glance makes us reject the 17x5.5 propellers since it's clear from the pictures (lacking any other additional source of information) that the chord is very small compared to the length of the blade (and thus the area of the blade and the mas of air moved per revolution will be lower and therefore the efficiency too), for this reason this propeller is rejected.
Remaining the 18x5.5 and 16x5.5 propellers, my opinion is to keep both options opened since this is a research project and would be interesting being able to study the multi copter performance under both conditions, if this can't be accomplished we'll keep working in the efficiency direction and thus the 18x5.5 propeller will be chosen.
Engine.
When choosing the engine we rejected the glow engines (using methanol and other chemical propellers) since the efficiency of those is the half of the gas engines one.
Once chosen gas engines we have two possibilities, 2 strokes or 4 strokes engine. Even though 4 strokes engines are more efficient than 2 strokes they are used for larger applications thus starting its availability range from a higher power output and higher weight than 2 strokes ones. For this reason we chose 2 strokes gas engines for our light weight application.
Once chosen the type of engine and the propeller the next step is estimate the thrust related to the rpm and the power needed to work within this values.
After several days searching and due to my limited experience on aerodynamics theory the best option was choosing a propeller thrust calculator. For this reason I chose two calculators and tried to match the results and obtain an average estimation.
Thrust calculators used are listed below:
from (http://www.rcuniverse.com/forum/m_10933735/anchors_10945114/mpage_1/key_/anchor/tm.htm#10945114): calc1- http://www.mae.my/download/ThrustEstimator2.xlsm
and
calc2- http://mvvs.nl/prop-power-calculator.xls
At this moment, we have two variables with winch we need to play for achieve our goal. We need to know the rpm needed for lifting our multi copter weight (with the rpm and the type of propeller we can estimate the thrust generated and the HP needed from the engine) and we need to choose an engine that will provide the needed power.
We choose the 6.500-8.500 rpm range since those values will give an average thrust of 2.7-6kg (calc1) and 2.7-6.1 kg (calc2) for each one of the propellers, what means that we will have a total thrust of 5.4-12 kg and our multi copter weight is estimated to be within those values.
In the other hand the given power needed to drive our propeller at this rpm is 0.74-2HP (calc1) and 1.01-2.26HP (calc2). As we see, there is a significant variation between calc1 and calc2 results regarding to the needed power. Since this is an estimation and until we build the device it will be very difficult to have an accurate knowledge about its real characteristics we'll pick the higher value so we make sure that we will have enough power with the given engine.
Those specifications will give us the needing for our engine: 2.26HPx2 = 4.42HP max.
After searching in the net we came up with several options:
The jC30 evo gas engine: http://www.hobbyking.com/hobbyking/store/__25424__JC30_EVO_Gas_engine_w_CD_Ignition_30cc_4hp_9_000rpm.html
The engine max power is 4HP at 9000RPM, it will be a little bit under our design specifications but for hovering and lifting should be enough if we don't need a very high vertical acceleration.Regarding to previous buyers feedbacks it's a good choice. Very low weight (1kg). price $185 Unfortunately there isn't any information about it's fuel consumpion and we can't do further research in this sense. At the time of this research (25/5/2012) it's not available in the shop.
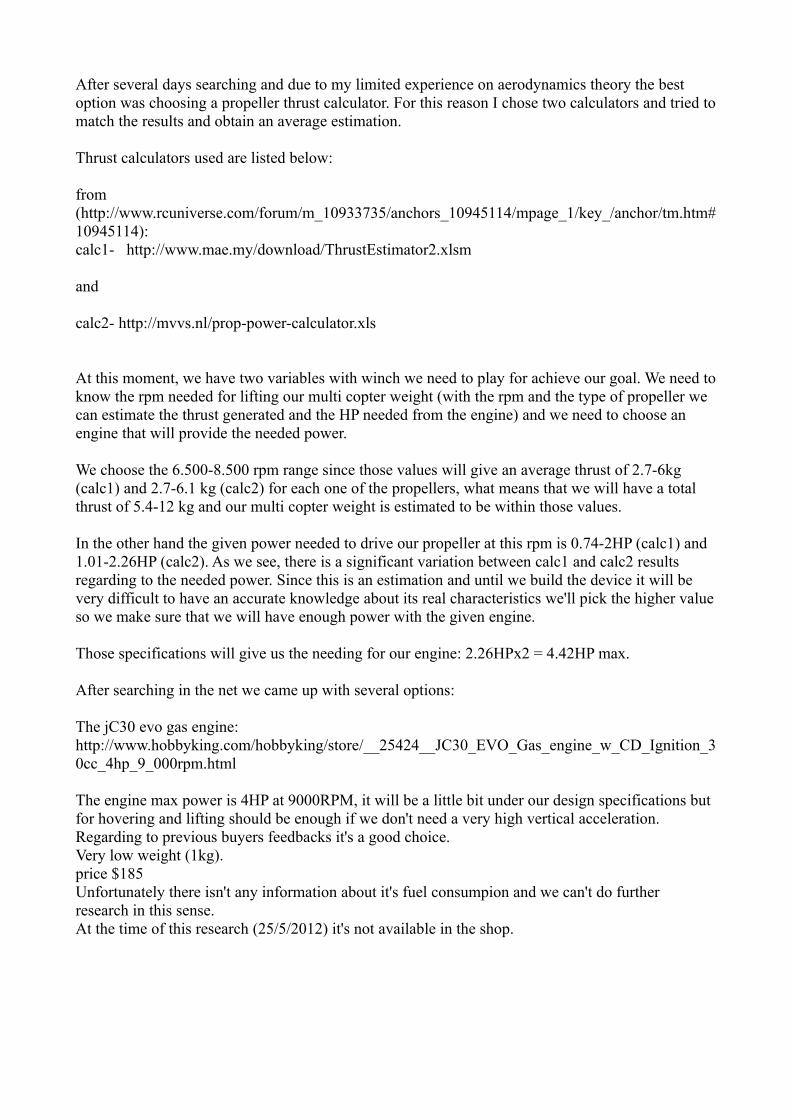
RCG 50cc Gas Engine 5.2HP/7500RPM: http://www.hobbyking.com/hobbyking/store/__9616__RCG_50cc_Gas_Engine_5_2HP_7500RPM.html
Performance: 5.2hp at 7500rpm (far enough for our needed specifications) Weight: 1360g price: $206.64 Unfortunately there isn't any information about it's fuel consumption and we can't do further research in this sense.
After researching on the net we came up with the conclusion that most two-strokes engine builders are not aiming at improving efficiency, but at cramming more fuel into the cylinder, therefore small, high output engines have a higher consumption per horsepower than less highly tuned ones.According to this last information we decide to chose the RCG 50cc Gas Engine.
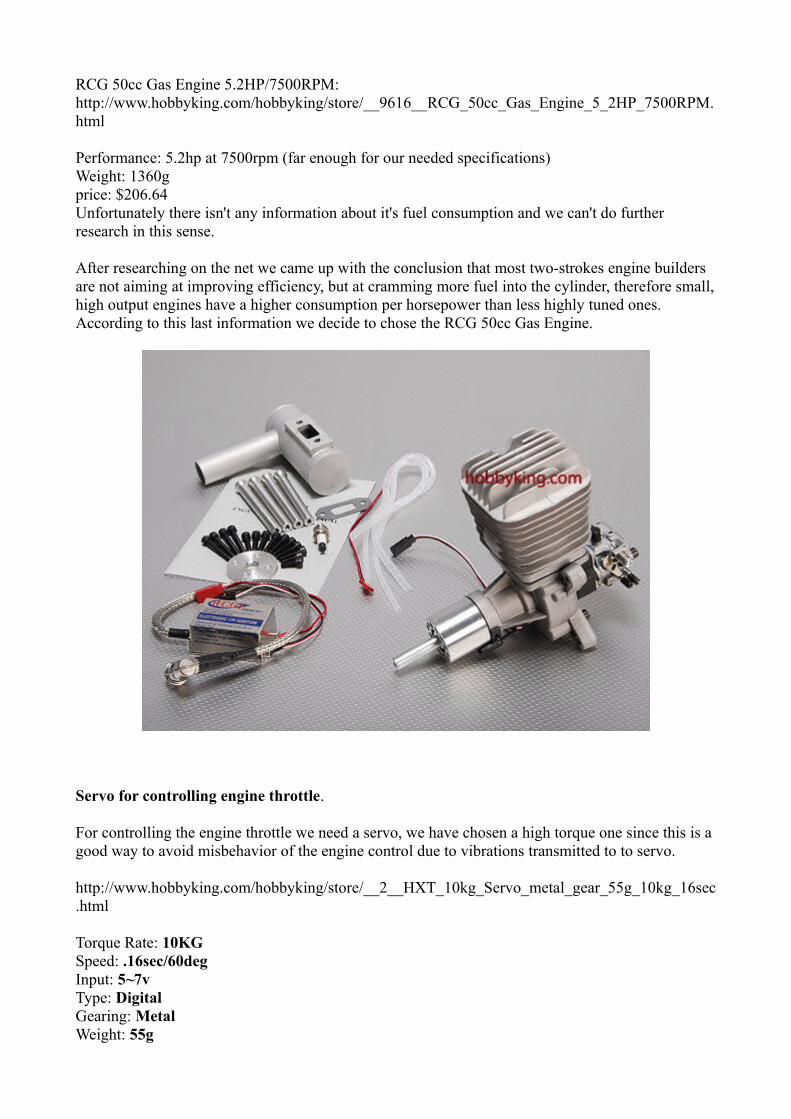
Servo for controlling engine throttle.
For controlling the engine throttle we need a servo, we have chosen a high torque one since this is a good way to avoid misbehavior of the engine control due to vibrations transmitted to to servo.
http://www.hobbyking.com/hobbyking/store/__2__HXT_10kg_Servo_metal_gear_55g_10kg_16sec.html
Torque Rate: 10KG Speed: .16sec/60degInput: 5~7v Type: DigitalGearing: MetalWeight: 55g

1x$7.97
Voltage regulator.
For powering the servos for the engine and camera control we need a voltage regulator to get 5-6V output.
http://www.hobbyking.com/hobbyking/store/__18521__Turnigy_HV_SBEC_5A_Switch_Regulator_8_42V_input_.html
8-42V input5-6V output5A Max current
1x$8.48
Gear rate.
Ultralight two-strokes tend to run very roughly at speeds below 2500 rpm and achieve their rated power at rotational speeds in the 5500 to 6500 rpm range. They achieve their rated power at 6500 rpm and 75% power at around 5300 rpm. Fuel efficiency drops off very quickly as rpm is reduced below the 75 %. According to this information we'll try to keep our engine allways above 5600rpm (75% of its max rpm).
For doing this we have to play with the pulleys diameters. Being 6500rpm the minimum speed for lifting 5kg we'll need to build a reduction system which will rotate the propeller at 6500RPM when the engine is working at 5600 rpm, thus the reduction ratio will be: 6500/5600=1.16, this means that the engine pulley must be 1.16 times bigger than the propeller pulley. TransmissionPulley/PropellerPulley = 1.16.
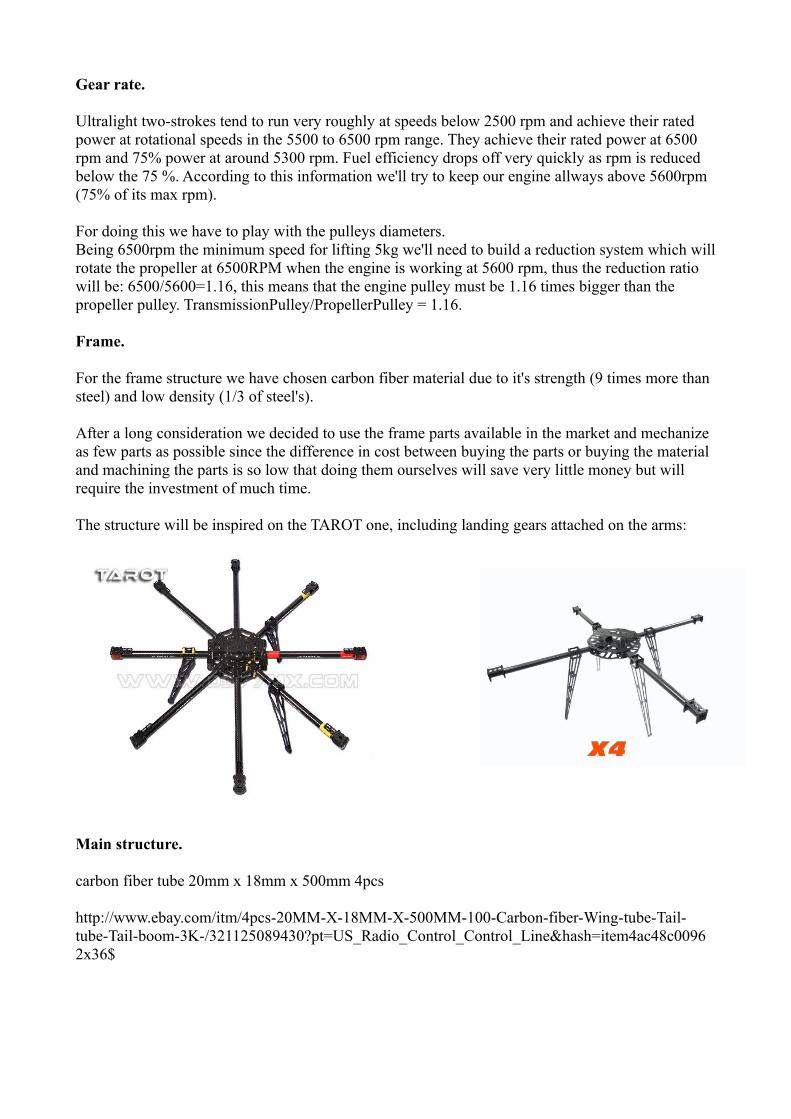
Frame.
For the frame structure we have chosen carbon fiber material due to it's strength (9 times more than steel) and low density (1/3 of steel's).
After a long consideration we decided to use the frame parts available in the market and mechanize as few parts as possible since the difference in cost between buying the parts or buying the material and machining the parts is so low that doing them ourselves will save very little money but will require the investment of much time.
The structure will be inspired on the TAROT one, including landing gears attached on the arms:
Main structure.
carbon fiber tube 20mm x 18mm x 500mm 4pcs
http://www.ebay.com/itm/4pcs-20MM-X-18MM-X-500MM-100-Carbon-fiber-Wing-tube-Tail-tube-Tail-boom-3K-/321125089430?pt=US_Radio_Control_Control_Line&hash=item4ac48c0096 2x36$
carbon fiber tube 18mm x 16mm x 500mm 2pcs
http://www.ebay.com/itm/2pcs-18MM-OD-X-16MM-ID-X-500MM-Carbon-fiber-wing-tube-Quadcopter-arm-Hexrcopter-/321127913556?pt=US_Radio_Control_Control_Line&hash=item4ac4b71854
1x19.9$
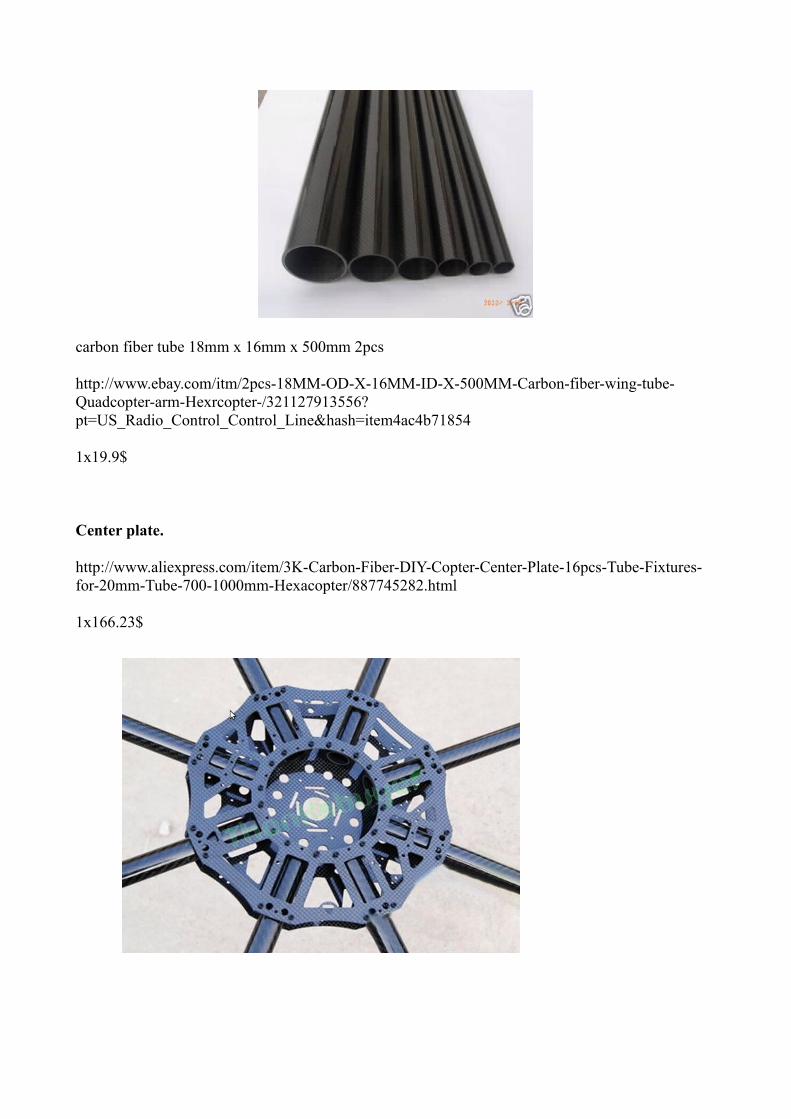
Center plate.
http://www.aliexpress.com/item/3K-Carbon-Fiber-DIY-Copter-Center-Plate-16pcs-Tube-Fixtures-for-20mm-Tube-700-1000mm-Hexacopter/887745282.html
1x166.23$
Fixtures for the motors.
20mm
http://www.ebay.com/itm/Glass-fiber-Motor-Mounting-Plate-Multi-Rotor-aircraft-F-16MM-25MM-Fixture-clamp-/130785351356?pt=US_Radio_Control_Control_Line&hash=item1e736a16bc
6X$3.98
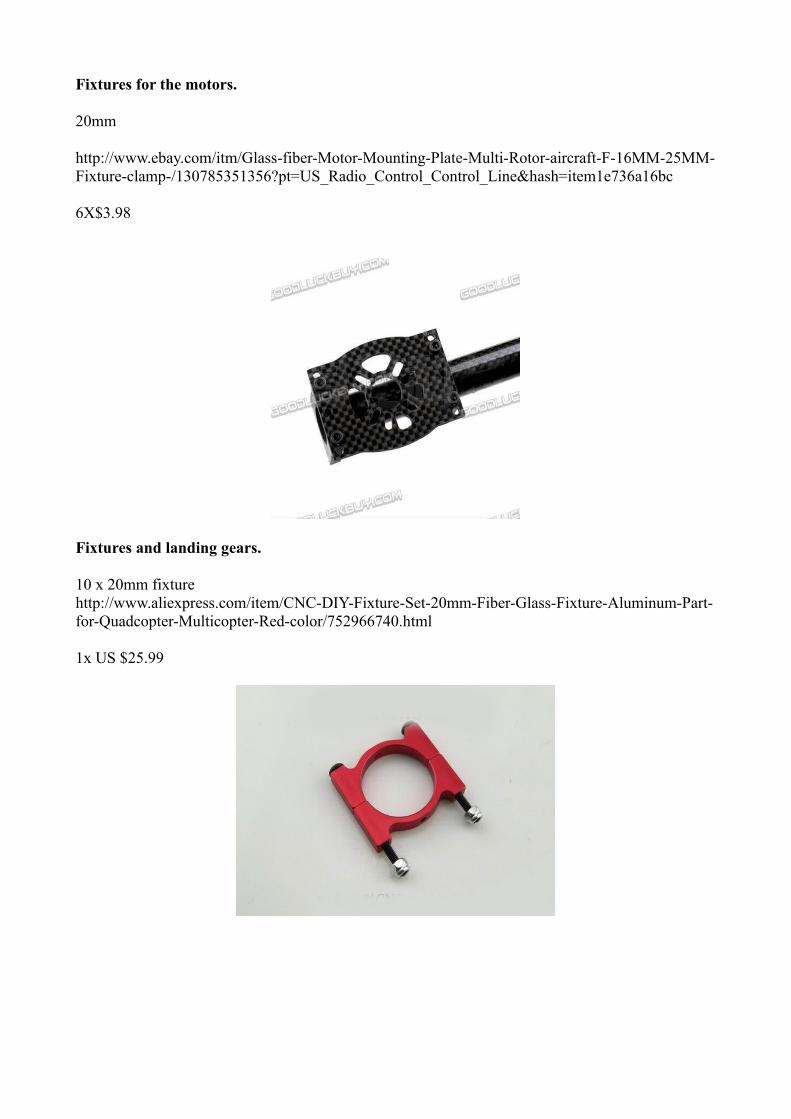
Fixtures and landing gears.
10 x 20mm fixture http://www.aliexpress.com/item/CNC-DIY-Fixture-Set-20mm-Fiber-Glass-Fixture-Aluminum-Part-for-Quadcopter-Multicopter-Red-color/752966740.html
1x US $25.99

Tubes for landing gears:
1xcarbon fiber tube 16mm x 14mm x 330mm 4pcs
http://www.ebay.com/itm/4pcs-16MM-OD-X-14MM-ID-X-330MM-Carbon-fiber-wing-tube-Quadcopter-arm-Hexrcopter-/221232813176?pt=US_Radio_Control_Control_Line&hash=item338280d478
2xUS $18.00
Camera mounting.
Servo 2 axis
http://www.goodluckbuy.com/navigator-two-axis-gimbal-camera-mount-ptz-for-multicopter-fpv-w-2-servos.html
1x $49.18
or
Brushless two axis (motors included)
http://www.goodluckbuy.com/2-axis-aluminum-brushless-camera-mount-gimbal-w-motor-for-gopro3-dji-phantom-fpv-aerial-photography.html $81.97
+
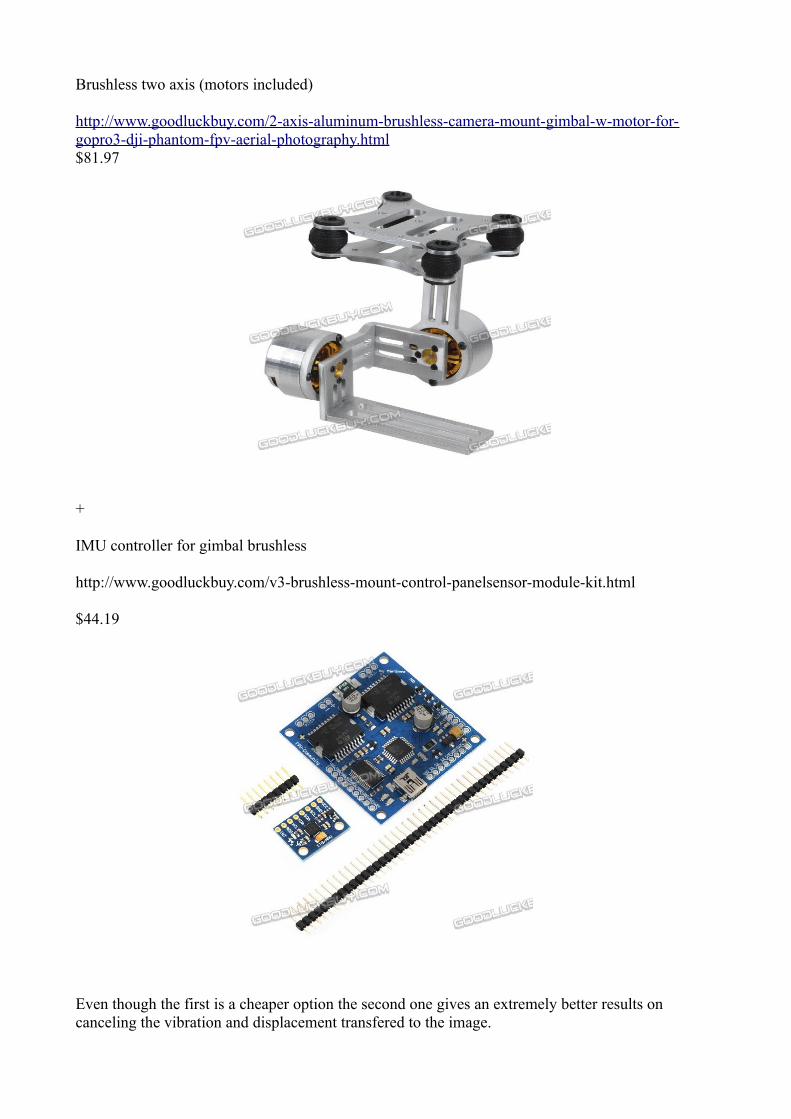
IMU controller for gimbal brushless
http://www.goodluckbuy.com/v3-brushless-mount-control-panelsensor-module-kit.html
$44.19
Even though the first is a cheaper option the second one gives an extremely better results on canceling the vibration and displacement transfered to the image.
Controller.
The controller chosen is ardupilot, due to the large amount of information about it on the net it's a good board for starting a project of this characteristics but in addition to that, a very important feature that this controller offers is it's own open source technology. For a research and development project it's compulsory to be able to fully access to the internal configuration of the controller, since we are attempting to control a multi rotor with an atypical configuration the current controllers on the market may not be enough for finding a satisfactory solution thus ardupilot board will be a right choice.
http://store.3drobotics.com/products/apm-2-5-kit-1
1x US $179.99
Transmitter & receiver.
Turnigy 9X 9Ch Transmitter without Module
http://www.hobbyking.com/hobbyking/store/__20976__Turnigy_9X_9Ch_Transmitter_without_Module_Mode_2_v2_Firmware_.html
$49.95

FrSky DF 2.4Ghz Combo Pack for JR w/ Module & RX
$52.21
Rubber anti-vibrating mount for engine box.
http://www.hobbyking.com/hobbyking/store/__34769__Camera_Mount_Vibration_Dampener_Ball_for_FPV_Models.html
12x0.99

Audio video transmitter-receiver.
http://www.goodluckbuy.com/5-8g-fpv-2w-12-ch-2000mw-wireless-audio-video-transmitter-av-sender-rc805-receiver-kit.html
$114.75
This emitter can be changed for another one from the same house but with less power so we'll be able to save more battery. In any case the frequency used will be 5.8 GHz so we make sure we don't interfere with the controlling signal of 2.4GHz.
FURTHER IMPLEMENTATION
For amplify the range of control it's recommended to build a tracking system using the GPS data through the telemetry from the emitter-receiver and two patch antennas, one on 2.4GHz attached to the RF emitter for increase the control range and other on 5.8GHZ attached to the video receiver for increasing the video receiving.
Some information can be found in the net showing that this kind of devices are not particularly difficult to build.