Embed Size (px)
DESCRIPTION
Kinematics of rotating bodies, moments of inertia, parallel axis theorem
Citation preview

1 1 1 Equation Chapter 1 Section 1 HW07 - rotational kinematics and mechanics : 10-CQ10, 10-8, 10-20, 10-28, 10-40, 10-44, 10-56, 10-62, 10-66, 11-2, 11-4, 11-10, 11-12, 11-16, 11-18.
Pool of questions: 10-8, 10-44, 10-56, 10-66, 11-4, 11-10, 11-12, 11-18
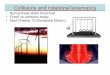
Chapter 10, Concept Question 10: Figure 10-26 shows three flat disks (of the same radius and mass) that can rotate about their centers like merry-go-rounds. Each disk consists of the same two materials, one denser than the other (density is mass per unit volume). In disks 1 and 3, the denser material forms the outer half of the disk area. In disk 2, it forms the inner half of the disk area. Forces with identical magnitudes are applied tangentially to the disk, either at the outer edge or at the interface of the two materials, as shown.
In the following questions, you will need to rank these disks based on various factors. If multiple disks rank equally, use the same rank for each, then exclude the intermediate ranking (i.e. if objects A, B, and C must be ranked, and A and B must both be ranked first, the ranking would be A:1, B:1, C:3). If all disks rank equally, rank each as '1'.
Rank the disks according to the torque about the disk center, greatest first.
, because , and
, and , and
,
Rank the disks according to the rotational inertia about the disk center, greatest first.
, because , and
(in which by
definition); in none of these is the applied force
or the lever-arm-vector .
Rank the disks according to the angular acceleration of the disk, greatest first.
, because the magnitude of the angular acceleration is given by due to .
Chapter 10, Problem 8: The angular acceleration of a wheel is , with
and . For the textbook problem, , , , and . At time t = 0, the wheel has an angular velocity of +2.0 rad/s and an angular position of +1.0 rad. Write expressions for (a) the angular velocity (rad/s) and (b) the angular position (rad) as functions of time (s).

(a) integrate angular acceleration using ( ); angular velocity is,
212\* MERGEFORMAT (.)
In 12, we have the following polynomial coefficients (with units indicated),
313\* MERGEFORMAT (.)
(b) Integrating 12, we obtain angular-displacement as a function of time,
414\* MERGEFORMAT (.)
One can obtain decimal-expressions of the polynomial coefficients as done in 13 quite easily.
515\* MERGEFORMAT (.)
Chapter 10, Problem 20: An object rotates about a fixed axis, and the angular position of a reference line on
the object is given by , in which and , where θ is in radians and t is in seconds. Consider a point on the object that is 8.0 cm from the axis of rotation. At t = 0, what are the magnitudes of the point's (a) tangential component of acceleration and (b) radial component of acceleration?
Expressions for the radial and tangential accelerations in terms of the derivatives of are,
616\* MERGEFORMAT (.)
Thus, we need,
717\* MERGEFORMAT (.)
Using 17 in 16, and , we get,
818\* MERGEFORMAT (.)

Chapter 10, Problem 28: In the figure, wheel A of radius rA = 10 cm is coupled by belt B to wheel C of radius rC = 25 cm. The angular speed of wheel A is increased from rest at a constant rate of 1.6 rad/s2. Find the time needed for wheel C to reach an angular speed of 64.5 rev/min, assuming the belt
does not slip. (Hint: If the belt does not slip, the linear (a.k.a., tangential) speeds at the two rims must be equal.)
Using , in which , which then implies (the 2nd
expression being a result from Problem 10.20; alternatively, we could posit the 3rd expression (
) from the results of the wallet-purse problem), we compute the time using as,
919\* MERGEFORMAT (.)
Chapter 10, Problem 40: The figure shows an arrangement of 15 identical disks that have been glued together in a rod-like shape of length L = 1.0000 m and (total) mass M = 100.0 mg. The arrangement can rotate about a perpendicular axis through its central disk at point O. (a) What is the rotational inertia of the arrangement about that axis? Give your answer to four significant figures.
(b) If we approximated the arrangement as being a uniform rod of mass M and length L, what percentage error would we make in using the formula in Table 10-2e to calculate the rotational inertia?
(a) Consider three of the disks (starting with the one at point O): ÅOO . The first one (the one at point O,
shown here with the plus sign inside) has rotational inertial . The next one (using the parallel-axis theorem) and the one after that is,
10110\* MERGEFORMAT (.)
There are seven such disks as 110, and so we calculate the rotational inertia using Mathematica’s ability to quickly carry out sums (not expected on quizzes—I am just fulfilling my own curiosity),
11111\*MERGEFORMAT (.)
For such disks (again to whet my curiosity), the total moment of inertia would be computed as,

12112\* MERGEFORMAT (.)
One can then plug in numbers if they wish, like so,
13113\* MERGEFORMAT (.)
(b) the moment of inertia of a rod of mass and length , in terms of
both and , is,
14114\* MERGEFORMAT (.)
One can already see the percent-error:
15115\* MERGEFORMAT (.)Chapter 10, Problem 44: Four identical particles of mass 0.50 kg each are placed at the vertices of a 2.0 m x 2.0 m square and held there by four massless rods, which form the sides of the square. What is the rotational inertia of this rigid body about an axis that (a) passes through the midpoints of opposite sides and lies in the plane of the square, (b) passes through the midpoint of one of the sides and is perpendicular to the plane of the square, and (c) lies in the plane of the square and passes
through two diagonally opposite particles?
(a) Each mass is r = 1.0 m from the A-axis,
16116\* MERGEFORMAT (.)
(b) The two masses nearest the B-axis are r1 = 1.0 m away from it, but the two furthest from the axis are
from it,
17117\* MERGEFORMAT (.)

(c) Two masses are on the axis (with r = 0) and the other two are a distance away,
18118\* MERGEFORMAT (.)
Chapter 10, Problem 56: The figure shows particles 1 and 2, each of mass m, attached to the ends of a rigid massless rod of length L1 + L2, with L1 = 20 cm and L2 = 80 cm. The rod is held horizontally on the fulcrum and then released. What
are the magnitudes of the initial accelerations of (a) particle 1 and (b) particle 2?
With counterclockwise positive, the angular acceleration for both masses satisfies
19119\* MERGEFORMAT (.)
Using SI units, we plug stuff into 119,
20120\* MERGEFORMAT (.)
The negative sign indicates the system starts turning in the clockwise sense. The magnitude of the acceleration vector involves no radial component (yet) since it is evaluated at t = 0 when the instantaneous velocity is zero. Thus, for the two masses, we use 120 to compute:
(a) (b)
Chapter 10, Problem 62: In the figure, three 0.0100 kg particles have been glued to a rod of length L = 6.00 cm and negligible mass and can rotate around a perpendicular axis through point O at one end. How much work is required to change the rotational rate (a) from 0 to 20.0 rad/s, (b) from 20.0 rad/s to 40.0 rad/s, and (c) from 40.0 rad/s to 60.0 rad/s? (d) What is the slope of a plot of the
assembly's kinetic energy (in joules) versus the square of its rotation rate (in radians-squared per second-squared)?
Before beginning the problem, we write (1) the rotational inertia of the object pictured above, and (2) the
expression for the work done to change the rotational kinetic energy of an object of rotational inertia from an
initial velocity to a final velocity ,

21121\* MERGEFORMAT (.)(a) we have,
22122\* MERGEFORMAT (.)(b) Now, f = 40 rad/s and i = 20 rad/s,
23123\* MERGEFORMAT (.)(c) In this case, f = 60 rad/s and i = 40 rad/s. This gives W = 56.0 mJ.
24124\* MERGEFORMAT (.)
(d) Since (using the from 121), the slope of a plot of vs. is obviously , and has units of mass times length squared.
Chapter 10, Problem 66: A uniform spherical shell of mass M = 4.5 kg and radius R = 8.5 cm can rotate about a vertical axis on frictionless bearings (see the figure). A massless cord passes around the equator of the shell, over a pulley of rotational
inertia , and radius , and is attached to a small object of mass m = 0.60 kg. There is no friction on the pulley's axle; the cord does not slip on the pulley. What is the speed of the object when it has fallen a distance 0.713 m after
being released from rest? Use energy considerations.
From Table 10-2, the rotational inertia of the spherical shell is: , so the kinetic energy (after the object has descended distance h) is,
25125\* MERGEFORMAT (.)In 125, the condition of the cord not slipping (“conservation of string”, in a sense) tells us,
26126\* MERGEFORMAT (.)
Putting 126 into 125, eliminating all ’s for ’s, and using , we then have,
27127\* MERGEFORMAT (.)Plugging in numbers, we finally have,

28128\* MERGEFORMAT (.)
Chapter 11, Problem 2: An automobile traveling 80.0 km/h has tires of 75.0 cm diameter. (a) What is the angular speed of the tires about their axles? (b) If the car is brought to a stop uniformly in 30.0 complete turns of the tires, what is the magnitude of the angular acceleration of the wheels? (c) How far does the car move during the braking? (Note: automobile moves without sliding).Converting the initial speed of the car to having units of meters per second, and the diameter to a radius having units of meters,
29129\* MERGEFORMAT (.)(a) The initial speed of the car is the initial speed of the center of mass of the tire, so the angular velocity obviously is,
30130\* MERGEFORMAT (.)
(b) “Thirty complete turns of the tire” is an angular displacement of . Dividing both
sides of by , in which , , , and , we have,
31131\* MERGEFORMAT (.)
(c) Above, we asserted , and this question asks us for ,
32132\* MERGEFORMAT (.)
Chapter 11, Problem 4: A uniform solid sphere rolls down an incline. What must be the incline angle (deg) if the linear acceleration of the center of the sphere is to have a magnitude of 0.10g?
We write Newton’s 2nd Law for rotation and translation for a sphere-center acceleration of , where
. Let the sphere be of mass , and “down” be positive. Then,
33133\* MERGEFORMAT (.)
We look up the moment of inertia of a sphere of radius and mass rotating about an axis passing through
its center: . We combine the two equations in 133 in such a manner as to eliminate (i.e., the 1st
equation yields , and work to solve for ,
/s R

34134\* MERGEFORMAT (.)
Chapter 11, Problem 10: A hollow sphere of radius 0.15 m, with rotational inertia I = 0.040 kg·m2 about a line through its center of mass, rolls without slipping up a surface inclined at 30° to the horizontal. At some initial position, the sphere's total kinetic energy is 20 J. (a) How much of this initial kinetic energy is rotational? (b) What is the speed of the center of mass of the sphere at the initial position? When the sphere has moved 1.0 m up the incline from its initial position, what are (c) its total kinetic energy and (d) the speed of its center of mass?
(a) It follows from looking up that the rotational kinetic energy is . Furthermore, it rolls without slipping, vcom = R, and we find the kinetic energy fraction (for both rotational and translational, which is handy to have) as,
35135\* MERGEFORMAT (.)
Simplifying the above ratio, we find Krot/K = 0.4. Thus, 40% of the kinetic energy is rotational, or Krot = (0.4)(20 J) = 8.0 J.
(b) We want to calculate the mass of the sphere. We look up the moment of inertia of a hollow sphere of radius
R and mass M rotating about an axis passing through its center: . We then calculate the apparently-unknown mass of the hollow sphere,
36136\* MERGEFORMAT (.)
We find the center of mass velocity using and 135 with ,
37137\* MERGEFORMAT (.)
(c) We note that the inclined distance of 1.0 m corresponds to as the change in height. Mechanical energy conservation leads to,
38138\* MERGEFORMAT (.)
Plugging in numbers as appropriate yields,

39139\* MERGEFORMAT (.)
(d) Notice that 135 is still true, no matter where the sphere has rolled upon the incline (so long as the sphere does not slip). Therefore, we trudge through the set of steps identical to 137, but this time using 139,
40140\* MERGEFORMAT (.)
Chapter 11, Problem 12 SN: In the figure, a solid brass ball of mass 0.280 g = m will roll smoothly along a loop-the-loop track when released from rest along the straight section. The circular loop has radius R, and the ball has radius r << R. (a) What is h if the ball is on the verge of leaving the track when it reaches the top of the loop? (b) If the ball is released at height h = 6.00R, what is the magnitude
of the horizontal force component acting on the ball at point Q? State your answers in terms of the given variables, using g where applicable.
“On the verge of leaving the track” means the normal force at the apex of the track is zero. Newton’s 2nd Law
and energy conservation (in which and looking up ) yields
41141\* MERGEFORMAT (.)
In 141, the former equation eliminates in the latter, subsequently permitting an expression for ,
42142\* MERGEFORMAT (.)
(b) Following the same procedure as in 141 except with a normal force, and no gravity,
43143\* MERGEFORMAT (.)
Again, we eliminate in either equation to get a normal force of,
44144\* MERGEFORMAT (.)

Chapter 11, Problem 16 (Nonuniform cylindrical object): In the figure, a cylindrical object of mass M and radius R rolls smoothly from rest down a ramp and onto a horizontal section. From there it rolls off the ramp and onto the floor, landing a horizontal distance d = 0.506 m from the end of the ramp. The initial height of the object’s center of mass is H = 0.90 m; the end of the ramp is at height h = 0.10 m. The object consists of an outer cylindrical shell (of a certain uniform density) that
is glued to a central cylinder (of a different uniform density). The rotational inertia of the object can be
expressed in the general form , but β is
not 0.5 ( ) as it is for a cylinder of uniform density. Determine β.
At all times and positions, the cylinder rolls without slipping, so if ever the cylinder has a velocity ,
45145\* MERGEFORMAT (.)
This problem then has a “projectile problem” grafted onto it. The cylinder falls a distance in a time each given by calculations largely similar to those of Chapter 4,
46146\* MERGEFORMAT (.)
Let the cylinder have an initial x-velocity of ; then, its kinetic energy is , the kinematic
, in which (see schematic from text), and the work-energy theorem yields the following three (3) equations,
47147\* MERGEFORMAT (.)
One can combine these three equations in such a manner as to isolate ; we have a symbolic expression for
as a function of (note: all of these can be measured with a ruler). Using , and
as indicated in the problem-statement,
48148\* MERGEFORMAT (.)
Chapter 11, Problem 18 (Flying Circus of Physics): In 1980, over San Francisco Bay, a large yo-yo was
released from a crane. Suppose the yo-yo was , and it consisted of two uniform disks of radius
connected by an axle of radius . What was the magnitude of the acceleration of the yo-yo during (a) its fall and (b) its rise? (c)What was the tension in the cord on which it rolled?

(a) The yo-yo’s center of mass accelerates due to a tension (for which , where is the
Newton’s 3rd Law pair of in the rope!), and it is subject to angular acceleration (for no slipping,
(note: !)), so Newton’s 2nd Law in both translational and rotational form with the no-slipping-condition appears as,
49149\* MERGEFORMAT (.)
Using the 1st equation to say to eliminate in the 2nd equation,
50150\* MERGEFORMAT (.)
For the numbers in the problem, we have , which is close to zero. (What does the limit correspond
to, and what is the acceleration of the yo-yo in this case?). Plugging in numbers yields .
(b) Our calculations with Newton’s 2nd Law, 149, made no reference to the direction of the velocity of the yo-yo (and indeed, nor does Newton’s 2nd Law ever reference velocity). Thus, the acceleration is the same as it is for part-a.
(c) This is kind of annoying to calculate, but it can be done. Using 149,
51151\* MERGEFORMAT (.)