Embed Size (px)
Citation preview

BEACHMED-e/OpTIMAL BeachErosionMonitoring
147
Assesment, validation and further uses of LiDAR survey in the Western
part of French Mediterranean sea
Hugues Heurtefeux, Audrey Lesaignoux, Cléa Denamiel
EID1-Mediterranee,DRE-LR2andAdministrativeDepartmentofHéraultarecurrentlydevelopingabeachsurveyintheGulfofAigues-Mortes(WesternpartoftheFrenchMediterraneansea)us-ingAirbornehydrographicLiDAR.ThistechniquehasbeenwidelyusedforcoastalsurveysintheUnitedStatesofAmericabutit’soneofthefirstexperimentationsinSouthofFrance.ThisstudypresentsananalysisoftheresultsofthisfieldtestingtoevaluatethecapabilitiesofHydrographicLiDARtomonitorcoastalevolution.Altimetryprecisionsanddensityobtainedareveryencourag-ingandcorrespondfullytotheexistingneeds.
IntroductionThetopo-bathymetriccampaignrealisedwiththeLiDARtechniqueontheGulfofAigues-Mortescoastiscentredonnewtechnologiesasapurposeinordertorealiseanaccurateandregularmoni-toringoftheshoreline.TheprovideroftheLiDARtechnologyistheSwedenCompanyBlomEnvironment&CoastalSurvey.TheLiDARpre-testflight(Mars2006)andcalibration(April2007)wererealisedbythiscompany.ThefinalflyingLiDARcampaigntookplacebetween24and26April2007andcoveredmostoftheGulfofAigues-Mortescoast.ThemainaimofthiscampaignwastovalidatetheuseofLiDARtech-nologyforthemonitoringofthetopographyandthebathymetryofthenearshorearea.Inafirstpart,thestudyarea,flyingcampaign,dataacquisitionandresultsprovidedbytheBlomEnvironment&Coastal SurveyABCompany (BECSAB)aredescribed.Theanalysis, checkingandvalidationoftheresultscarriedbyEIDMéditerranéearethenpresentedinthesecondpart.Finallyandtoconclude,anassessmentoftheresultsobtainedontheGulfofAigues-MorteswiththeLiDARprocedureisrealised.Thefutureoftheuseofsuchatechnologywiththeaimofdescribingtheevo-lutionofthecoastisalsodiscussed.
LiDAR mission: Flying campaign Description of the study areaThestudyareacovers47km²alongtheGulfofAigues-Mortescoast.ThisareaislocatedbetweentheFrontignanmunicipality(onthewesternpart)andtheGrande-Mottemunicipality(ontheeasternpart).Becauseoftheconvexformofthegulf,thesurveyarea-representedinblueinFigure1-wascutintothreeparts:zonesA,BandC.Indeed,theLiDARdataacquisitioncouldonlybedoneonrec-tilinearareasandinordertocovertheentireareaoftheGulfofAigues-Mortesthecut-outinthreerectilinearareaswasthebesttechnicalsolution.ThecoordinatesofthethreezonesweregiveninLambertIIISouthsystem.
1 EntentendeinterdépartementaledeDémoustication2 DirectionRégionaledel’EquipementLanguedoc-Roussillon

Heurtefeuxetal. Assesment,validationandfurtherusesofLiDARsurvey:WesternFrenchMediterraneansea
148
Figure 1 - Schematic representation of the 3 areas (zones A, B and C) covered by the flying LiDAR campaign on the Gulf of Aigues-Mortes.
Description of the final flying campaign and data acquisitionAlltheflyingcampaigns(pre-test,calibrationandfinalflights)wererealizedbytheBECSABCom-panywith theHawkEye II system (Figure2).This technologyallowsacquiring topographicandbathymetricdata.Inthebathymetricmode,LiDARemitsgreenlaserat532nmwitha4kHzfre-quency.Itisprojectedbyarotarymirrorwhichsweepswatersurfacewithswathwidthof120mandflightaltitudeof300m.AssociatedtotheLiDARsystem,navigationandpositionareprovidedbyanintegratedGPSandinertialreferencesystem(Figure2)whichdeliversaccuratecoordinatesinallthreedimensions.ThedataarereferencedonWGS84UTMprojectionsystemandtheacquisi-tionisrealisedwitha1Hzfrequency.
Figure 2 - LiDAR Hawkeye II system (left) and GPS station (right).

BEACHMED-e/OpTIMAL BeachErosionMonitoring
149
AfterthecalibrationflightrealisedinSwedeninordertotestthesystem,the“AirCommander”planeequipped with LiDAR technology was ready for the final flying campaign in the Gulf of Aigues-Mortes.Between24and26April2007,threeflightswithatotaldurationof8h30allowedacquiringalldata.Meteorologicalconditionswereperfectduringthewholecampaign:1)watertemperaturewascirca18°C,2)airtemperaturewascirca22°C,3)windvelocitywascirca10km/hand4)turbiditymeasure-mentsshowedthatwaterqualityhadnoinfluenceonLiDARdataacquisitionwithavisibilityofcirca4m.
Description of the results and the dataAttheendofthecampaign,theBECSABCompanyprovidedtwotypesofdata:rawdata(morethan 80 million points and non geo-referenced orthophotos acquired each second during thewholecampaign)andthepost-processdata(7millionpointsandgeo-referencedorthophotos).TherawdatainLASandASCIIformatwasnotusedbyEIDMéditerranée. Infactonlythepost-processdataisreallyofinterestforoperationalstudies.Dataprocessingwasrealisedinthreesteps:
1) WGS84coordinatesweretransformedinLambertIIIsouthcoordinates;2) thetotalareacoveredduringthecampaignwascutinto23zones;3) datawerecleared(only30%ofthetotaldataisuseful)andtwoclassificationswereestablish:
groundpointsandhighvegetationpoints.Finallythepost-processdataprovidedbythecompanywere:1) theX,Y,ZpointsinASCIIformatgiveninLambertIIISouthcoordinates;2) theclassificationofthegroundandhighvegetationpoints;3) theregulargrids(withameshresolutionof2m,5mand10m)inASCIIandGeoTIFFformat
ofthetopographyandthebathymetry:digitalelevationmodel(DEM),digitalterrainmodel(DTM)anddigitalslopemodel(DSM);
4) the geo-referenced orthophotos (in Lambert III south coordinates) with a resolution of 1mand25cm.
Assessment of the technical course of the LiDAR 2007 mission Concerning the technical course of the campaign and the acquisition of data, the LiDAR 2007missionwasasuccess.MoreovertheexchangeswiththeBECSABCompanywereeasyanddatarestitutiontookplaceonly1monthafterthecampaign.Thisexperimentcanbethusreproducedwiththesamecompanyinthefuture.But, with the aim to show that the LiDAR technology is available to describe the nearshorebathymetryandtopographyandtoprovidebetterresultsthanothersmethods,allthepost-proc-essLiDARdataprovidedbythecompanyhadtobecarefullyanalysedandchecked.
LiDAR data analysis, checking and validation Checking and validation of the orthophotosThefirststepoftheLiDARdataanalysis,checkingandvalidationwastocomparetheorthophotosprovidedbythecompanytothoseproducedin2005byGaiaMapping.Thecomparisonconsistsingettingtheroads,houseroofs,vegetation,etc.,ofthetwotypesofphotostocoincide.OneexampleofthiscomparisondonebytheEIDMéditerranéewasrealisedwiththeorthophotosoftheFrontignanmunicipality(Figure3).Thetwoorthophotosareinnaturalcoloursandpresentthesameaestheticqualities.Moreoverthehouse roofs, the vegetation and the beach coincide with a great precision (Puissant andWeber,2006).Concerningthecontrasts,theLiDARortophotoshaveabetterqualitythanthatofortophotosprovidedbyGaiaMapping.TheLiDARtechnologyisthusvalidatedconcerningtheorthophotos.

Heurtefeuxetal. Assesment,validationandfurtherusesofLiDARsurvey:WesternFrenchMediterraneansea
150
Figure 3 - Comparison of the orthophotos obtained with the LiDAR technology in 2007 (top) and those provided by Gaia Mapping in 2005 (bottom) in the municipality of Frontignan.
Validation of the Delauney triangulation: problems of boundary artefacts Theregulargrids(DTM,DEMandDSM)–deliveredbytheBECSABCompanyandgeneratedbyEIDMéditerranée-wereobtainedwithDelauneytriangulation(Figures4and5).Thiskindofgeostatisticisaninterpolationwithspecificrules:threedatapointsdefineonecirclewhichnotcontainotherdatapoints(in2D).Thisinterpolationcanalsobetransposedin3D.
Figure 4 - Non-Delaunay triangle (a); Delaunay triangle (b). Figure 5 - Illustration of the Delaunay triangulation.
TheTIN(TriangleIrregularNetwork)waschosenbecauseitisnaturallyadaptedtothesloperestitu-tion(Swales,2002).Generally,whendata is interpolatedsomeproblemscanappearat theboundaries.Thesecondstep of the data analysis, checking and validation was thus to know if theTIN generated someboundaryartefacts.Thefollowingprocedurewasused:1) twoadjacentareaswereinterpolatedseparately;2) thetwoareaswereputtogether;3) thecoincidenceofthetwoareaboundariesandtheprofilesobtainedatthejunctionwere
checked.

BEACHMED-e/OpTIMAL BeachErosionMonitoring
151
TheprofilesgeneratedwiththisprocedurewereallcontinuousandthustheDelauneytriangula-tionwasverifiednottoproduceartefactsattheboundaries(Populus,2003).TheuseoftheDelauneytriangulationtogeneratetheDTM,DEMandDSMwasvalidated.
Checking and validation of the X, Y, Z bathymetric dataInordertovalidatetheX,Y,ZbathymetricdatadeliveredbytheBECSABCompany,EIDMéditer-ranéecomparedthesedatawiththoseobtainedwiththesinglebeamtechnologyinseveraldis-tinctareasoftheGulfofAigues-Mortes.Thecomparisonofthebathymetricdataobtainedwiththetwotechnologiesrequiresthegenera-tionofDTM(DigitalTerrainModel).EIDMéditerranéechosetogeneratetheLiDARDTMwiththeX,Y,ZdatadeliveredbytheBECSABCompanyandnottousetheLiDARDTMdeliveredbytheCompany.ThegenerationoftheLiDARandthesinglebeamDTMswasrealisedwithMapInfousingtheDe-launeytriangulationmethod.Concerningthesinglebeammeasurements,thedepthdatamustbecorrected-followingwatertemperatureandsalinity -beforethegenerationoftheDTM. Indeed, thevelocityof thesingle-beamsignalisdirectlylinkedtowatertemperaturefollowingtheformulabelow[1]:
Gapinmeters=(1/VT1-1/VT2)*d10*VT2[1]Where:- T1andT2arethetemperaturesat10mabovethebottomoftwoprofilesrealisedinthesame
locationbutnotunderthesameconditions- VT1andVT2arethesoundvelocitiesattemperaturesT1andT2- d10=10m
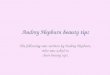
ThesoundvelocityinthewaterfollowingwatertemperatureisgivenbythecurveinFigure6.
Figure 6 - Sound velocity in the water (m/s) following water temperature (°C).
Thecomparisonbetweenprofilesmeasuredatdifferenttemperatureshadshownthatthegapthe-oryiswellcorrelatedtomeasurements.Thisgapincreaseswithdepthandprofilesslowlychangeclosetotheexternbar.Themeasurementerrorinthedepthneartheclosuredepththusresultsfromthecaptorerrorduetothevariationsoftemperature.Finally,thetemperaturecorrectioncanbeap-pliedonthesinglebeamdataandtheDTMisgeneratedwiththesecorrecteddata.TheX,Y,ZLiDARdataused in thiscomparisonare thepost-processeddata inLambert IIISouthcoordinates.

Heurtefeuxetal. Assesment,validationandfurtherusesofLiDARsurvey:WesternFrenchMediterraneansea
152
AlthoughseveralcomparisonsoftheLiDARandmonobeamdataweredone,wejustpresentoneexamplehere.OneoftheareaswherethevalidationofthebathymetricX,Y,ZLiDARdatawasdoneistheVille-neuve-Lès-Maguelonezone(Figure7,Table1).
Figure 7 - Villeneuve-Lès-Maguelone zone.
Table 1 - Lambert III South Co-ordinates of the Villeneuve-Lès-Maguelone zone.
X1,Y1 723780m,134000m
X2,Y2 723920m,134100m
X3,Y3 724740m,132940m
X4,Y4 724590m,132890m
ThegenerationoftheDTMwithMapInfointhisareausingthetwotypesofdataandtheir3Drep-resentations(Figure8)allowedcomparingandvalidatingtheLiDARtechnologyconcerningbathy-metricdata.Indeed,thetwoDTMs(Figure7)aresimilar.MoreovertheLiDARDTMrepresentsthelittoralbarswithprecisionwhilethesinglebeamDTMgivesaresultwithasmoothersurface.TheLiDARtechnologycharacterisedthebottomirregularitiesandreliefbetterthansinglebeam.Itisthusagoodtoolforthemorphologicdescriptionofthenearshorearea.Inordertocomparewithmoreprecisionthetwotypesofdata,somebathymetricprofileswereex-tractedfromtheLiDARandthesinglebeamDTMs(Figure9).Afterseveralcomparisonsitcanbeestablishedthat:1) between0mand4.5mofdepththegapbetweenthetwotypesofdataislowerthan10cm;2) after4.5mofdepththisgapisbetween10cmand60cm.Theincreaseofthegapfollowingdepthbetweenthetwotypesofdatacanbeexplainedbythein-creaseofturbidityorbythenatureofthebottom.TheLiDARprecisionthusdependsonturbidityandthenatureofthebottom.Indeedwhenthebottomroughnessincreasesthereflectanceandtheampli-tudedecrease(Lesaignoux,2006).Forexample,inthezoneofVilleneuve-Lès-Maguelonethepresenceofarockyreliefbetween8mand11mofdepthcanexplainthelargegapbetweenthetwotypesofdata.TheLiDARdataarethuslesspreciseonthisareathanthesinglebeamdata.

BEACHMED-e/OpTIMAL BeachErosionMonitoring
153
Figure 8 - 3D representation (with MapInfo) of the Maguelone MNT generated with the X, Y, Z LiDAR data and with the X, Y, Z singlebeam.
Figure 9 - Bathymetric profiles of the Maguelone zone generated with LiDAR data (red) and with singlebeam (green).
TheLiDARX,Y,ZbathymetricdataarethusvalidatedontheGulfofAigues-MortesandalthoughLiDARprecisiondecreaseswhenthedepthincreases,theLiDARtechnologyprovidegoodresultsconcerningthebottomrelief.
Checking and validation of the X, Y, Z topographic dataValidation of the LiDAR DTM generated with these dataInordertovalidatetheX,Y,ZtopographicdatadeliveredbytheBECSABCompany,EIDMéditer-ranéecomparedthesedatatothoseobtainedwithD-GPStechnologyinseveraldistinctareasoftheGulfofAigues-Mortes.Suchasforthebathymetricdata,thecomparisonofthetopographicdataobtainedwiththetwotechnologiesrequiresthegenerationofDTMs(DigitalTerrainModel).EIDMéditerranéechosetogeneratetheLiDARDTMwiththeX,Y,ZdatadeliveredbytheBECSABCompanyandnottousetheLiDARDTMdeliveredbytheCompany.ThegenerationoftheDTMsfromLiDARandD-GPStechnologieswasrealisedwithMapInfousing

Heurtefeuxetal. Assesment,validationandfurtherusesofLiDARsurvey:WesternFrenchMediterraneansea
154
theDelauneytriangulationmethod.AlthoughseveralcomparisonsoftheLiDARandD-GPSdataweredone,wejustpresenthereoneexample.OneoftheareaswherethevalidationofthetopographicX,Y,ZLiDARdatawasdoneisthezoneofVilleneuve-Lès-Maguelone(Figure10,Table2).
Figure 10 - Location of topographic measurements (in red) in the Villeneuve-lès-Maguelone zone.
Table 2 - Lambert III South coordinates of the area of topographic measurements.
X1 723573m Y1 134124mX2 723616m Y2 134254mX3 723886m Y3 134146mX4 723723m Y4 134011m
ThegenerationoftheDTMwithMapInfointhisarea,usingthetwotypesofdataandtheir3Drep-resentations(Figure11),allowedtocompareandtovalidatetheLiDARtechnologyconcerningthetopographicdata.Indeed,thetwoDTMs(Figure11)presentsimilarities.MoreovertheLiDARDTMrep-resentsthedunereliefwithprecisionwhiletheD-GPSDTMgivesaresultwithasmoothersurface.Forexample,thebermiswelldescribedbytheLiDARDTMwhileitdoesnotappearontheD-GPSDTM.MoreovertheinterpolationofthedatameasuredwithD-GPSgeneratesalargeareaofartefacts(redcircleontherightofFigure11).InfactthisareacouldnotbecoveredbythemeasurementsandtheDTMisextrapolated.Withthesamenumberofdata(approximately4.000pointsforeachmethod–seeFigure12atthebottom)-butnotthesamerepartitionofthedata-thequalityofthetwotypesofmeasurementsisnotthesame.IndeedtheregulardistributionoftheLiDARdataallowsdescribingthebottomir-regularitieswithprecision.TheirregulardistributionoftheD-GPSdatadescribedsomeareaswithgreatprecision(areaswithnumerousdata)anddidnotdescribesomeothersareas(areaswithoutdata).Becauseofthislackofdatainsomeareas,theinterpolationneededforthegenerationoftheDTMcreatessomeartefactsandsmoothesthedata.

BEACHMED-e/OpTIMAL BeachErosionMonitoring
155
Figure 11 - 3D representation of the DTM (realised with MapInfo) measured in the Maguelone zone with LiDAR technol-ogy (left) and with D-GPS (right); red area: artefacts.
Figure 12 - Repartition of data (realised with MapInfo) measured in the Maguelone zone with the LiDAR technology (left) and with D-GPS (right).
Figure 13 - Topographic profiles in the Maguelone zone measured with LiDAR technology (red) and with D-GPS (green).
TheLiDARtechnologycharacterisedthebottomirregularities(Figure13)andreliefbetterthantheD-GPStechnology.Itisthusagoodtoolforthetopographicdescriptionofthenearshoreareaal-thoughthemeasurementerroriscirca15cm.
Results at the land-sea interfaceEIDMéditerranéewasinterestedinvalidatingtheLiDARDTMattheland-seainterface.Indeedthestudyoftheshorelineisoneofthemainobjectivesinbeachprotection.AshorelineareawasselectedintheMaguelonezoneattheland-seainterface.This area contains 156 data measurements (Zmin= - 0.276 m and Zmax= 0.635 m) and 128 data

Heurtefeuxetal. Assesment,validationandfurtherusesofLiDARsurvey:WesternFrenchMediterraneansea
156
measurements (Zmin= -0.38mandZmax=0.76m)obtainedrespectivelywithD-GPSandLiDARtechnology(Figure13).ThespatialrepartitionofdataseemstobesimilarandtheLiDARdatadidnotcoverthefullshorelineduetothelaserimprecisioninthisarea.ThegenerationoftheDTMwithMapInfointheshorelineareausingthetwotypesofdataandtheir3Drepresentations(Figure14)allowedcomparingandvalidatingtheLiDARtechnologyconcerningthetopographicdataattheland-seainterface.
Figure 14 - 3D representation of the DTM (realised with MapInfo) of the Maguelone zone at the land –sea interface meas-ured with the LiDAR technology (left) and with D-GPS (right). Repartition of points at the bottom.
TheprofilesextractedfromtheDTM(Figure15)allowstudyingthelocationoftheshorelinewiththetwotypesofmeasurements.TheresultofthiscomparisonisthatLiDARtechnologycannotre-producetheshoreline.Indeedtheerrorofmeasurementsiscloseto40cmwhichisveryrelevantinthisfield(Figure15,redline).D-GPSmeasurements(Figure15,greenline)arethusmorepreciseconcerningtheshoreline.Finally,theLiDARX,Y,ZtopographicdatawerevalidatedintheGulfofAigues-MortesandalthoughLiDARisnotadaptedforthedescriptionoftheshoreline,LiDARtechnologyprovidegoodresultsconcerningtherelief.
Figure 15 - Topographic profiles at the land-sea interface meas-ured with LiDAR technology (red) and with D-GPS (green).

BEACHMED-e/OpTIMAL BeachErosionMonitoring
157
Checking and validation of the DTM LiDAR dataIn1982SHOM3measured–withthetraditionaltools-thetopo-bathymetryofanareaof160km²locatedbetweenthemunicipalitiesofFrontignanandPalavas-les-Flots.Thenumberofdatameas-uredbySHOMwasapproximately15.000pointsinthisarea.Thehorizontalandverticalprecisionsarecirca30cmforadepthgreaterthan30m.In the Villeneuve-lès-Maguelone zone, 5.000 data measurements were realised by SHOM and3.000.000datameasurementswererealisedwithLiDARtechnology.ThecomparisonbetweentheDTMprovidedbySHOMandtheLiDARDTM(Figure16)showsthatLiDARtechnologyallowstohaveaverygoodprecisionfortherelief. IndeedtheinnerbariswellreproducedontheLiDARDTMwhileitdoesnotappearontheSHOMDTM.MoreovertherockyreliefandtheouterbararebetterrepresentedontheLiDARDTM.Thesedifferencesareessentiallyduetothedensityofdatameasurements. Indeedtheinterpola-tionisalwaysbetterforalargedatasetandLiDARtechnologyprovides600timesmorepointsthanSHOMintheareaofMaguelone.
Figure 16 - 3D representation (realised with MapInfo) of the LiDAR 2007 DTM (left) and of the SHOM 1982 DTM (right).
ConclusionThetechnicalcourseofthecampaignandthedataacquisitionaswellastheanalysisoftheresultsoftheLiDAR2007missionwasasuccess.IndeedEIDMéditerranéeshowedthatLiDARtechnologyprovidesbetterresultsthanthetraditionalmethodsfortopo-bathymetricmeasurements.Thepreci-sionofLiDARdataisalwayssatisfyingexceptconcerningtheshorelinedescription.ConcerningtheuseofLiDARtechnologyintheGulfofAigues-Mortesitisthuspossibletoconcludethat:- LiDARtechnologyallowstodescribethetopo-bathymetryofnearshoreareas;- acquisitionoftopo-bathymetricdataandorthopohotoswithLiDARtechnologyis30%lessex-
pensivethanbytraditionalways;- acquisitionofaverylargedatasetbyLiDARtechnologyallowstoimprovethequalityandthe
precisionofDTMs,DEMsandDSMs.Concerning the prospects of the use of LiDAR data, many forms can be explored in the Gulf ofAigues-mortes.First,theanalysisoftopo-bathymetricdataallowsdescribingthesedimentarystructureswithpreci-
3 SHOM:ServiceHydrographiqueetOcéanographiquedelaMarine.

Heurtefeuxetal. Assesment,validationandfurtherusesofLiDARsurvey:WesternFrenchMediterraneansea
158
sion(Populusetal.,2001).Thelong-termacquisitionofLiDARdatainthesameareashouldbeinter-estinginordertocomparetheevolutionofthesestructuresfollowingtheseasonsandtheyears.Second,LiDARdataallowsdescribingthesubmersionofthelandduetosealevelrise(becauseofstormsorclimatechanges).Indeed,theanalysisofstaticsubmersionmaps(exampleinFigure17)shouldprovideafirstassessmentoftheimpactofsealevelriseonthelandscape.
Figure 17 - Static submersion due to a sea level rise of 1m (“Surfer” 8 software) – DTMs of the Villeneuve-lès-Maguelone area before submersion (left) and after submersion (right), generated with LiDAR data (top) and D-GPS and singlebeam data (bottom). The red circles represent the numerical artefacts.
Third, the use of hydrodynamic models generating the currents following meteorological condi-tions,swell,submersionandtopo-bathymetry(obtainedwithLiDARtechnology)shouldprovideafirstassessmentoftheeffectsofcurrentsonthesedimentarytransport.Fourth,LiDARdatacanbepost-processedwiththeaimtodetermineecologicalunits:forexampletodeterminethepresenceandtheconcentrationofsomehabitatsorspecies.Andatlast,acomparisonamongwebcamimages,satelliteimagesandLiDARdatashouldbedonewiththescopeofdeterminingthebestwaytodescribeshorelineevolution.
AcknowledgmentThe topo-bathymetriccampaign realisedwith theLiDARtechnique in theGulfofAigues-Mortescoast(WesternpartoftheFrenchMediterraneansea)wascarriedwithintheframeworkoftheOCRINTERREGIIICBEACHMED-eProgramme.Thisprogrammeisaresearchschedulecentredonnewtechnologieswiththepurposeofrealisingapreciseandregularmonitoringoftheshoreline.ThefinancialpartnersofthisambitiousprojectaretheEuropeanCommission,“Conseilgénéraldel’Hérault”andthe“DirectionRégionaledel’équipementLanguedocRoussillon”.

BEACHMED-e/OpTIMAL BeachErosionMonitoring
159
ReferencesLesaignouxA.(2006)-Modélisation et simulations de trains d’ondes LiDAR «vert»: application à la dé-
tection de faibles lames d’eau en rivière.Master’sThesis,UMII.PopulusJ.,BarreauG.,FazilleauJ.,KedreuxM.andL’YavancJ.(2001)-Assessment of the LiDAR topo-
graphic technique over a coastal area.CoastGIS2001.PopulusJ.(2003)-Les modèles numériques de terrain en zone intertidale.REBENT,Décembre2003.PuissantA.andWeberC.(2003)-Les images à très haute résolution, une source d’information géogra-
phique en milieu urbain ? Etat des lieux et perspectives.L’espacegéographique,pp.345-356.SwalesA.(2002)-Geostatistical estimation of short-term changes in beach morphology and sand bud-
get.JournalofCoastalResearch,18:338-351.