-
8/8/2019 Huang Research
1/34
Servo - Large
motor
motion actuator
rotation
A rotation is a moving thing a movement of anobject in a
circular motion. An object rotates around acenter (or point) of
rotation. A three-dimensional objectrotates always around an
imaginary line called an axisas the Eulers rotation theorem shows.
If the axis ofrotation is within the body, the body is said to
rotateupon itself, or spinwhich implies relative speed andperhaps
free-movement with angular momentum. Acircular motion about an
external point.
CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.0CH.09
-
8/8/2019 Huang Research
2/34
Navigation by the Soles of Your Feet
vibration motor h t t p : / / w w w . s p a r
k f u n . c
o m / c o m m e r c e / p r o d u c
t_ i n f o
. p h p ? p r o
d u c t s_
i d = 8
4 4 9
h t t p : / / s p e c
t r u m . i e
e e . o
r g / r o b o t i c s /
h o m e - r o b o t s / n a v i g a t
i o n -
b y - t h e - s o
l e s -
o f - y o u r - f e e
t - a n d - t h e - s e a t - o
f - y o u r - p a n
t s e r s . a
s p
motion actuation:
vibration actuator
CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Description: A vibration motor! This itty-bitty,
shaftless vibratory motor is perfect for non-audible
in-dicators. Use in any number of applications to indicateto the
wearer when a status has changed. All movingparts are protected
within the housing. With a 2-3.6Voperating range, these units shake
crazily at 3V. Onceanchored to a PCB or within a pocket, the unit
vibratessoftly but noticeably. This high quality unit comes with
a3M adhesive backing and reinforced connection wires.
-
8/8/2019 Huang Research
3/34
stroke tubular actuator
Firgelli PQ Series with Position Feeback
motion actuation:
linear actuation
A linear actuator is an actuator that, whendriven by a
non-linear motion, creates linear mo-tion (as opposed to rotary
motion, e.g. of an electricmotor). Mechanical and hydraulic
actuation are themost common methods of achieving the linear
mo-tion.
Typically, a rotary driver (e.g. electric motor)is mechanically
connected to a lead screw so thatthe rotation of the electric motor
will make the leadscrew rotate. A lead screw has a continuous
heli-cal thread machined on its circumference running
along the length (similar to the thread on a bolt).Threaded onto
the lead screw is a lead nut withcorresponding helical threads. The
nut is preventedfrom rotating with the lead screw (typically the
nutinterlocks with a non-rotating part of the actuatorbody).
Therefore, when the lead screw is rotated,the nut will be driven
along the threads. The direc-tion of motion of the nut will depend
on the direc-tion of rotation of the lead screw. By
connectinglinkages to the nut, the motion can be converted
to usable linear displacement. Most current actua-tors are built
either for high speed, high force, ora compromise between the two.
When consideringan actuator for a particular application, the
mostimportant speci cations are typically travel, speed,force,
accuracy, and lifetime.
CH.09CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
-
8/8/2019 Huang Research
4/34
hydraulic actuator
hydraulic actuator h t t p : / / w w w . a i r o
i l . c o m
/ p r o
d u c t s / v i e w
/ 4 9 8 / v r x - p n e u m a t
i c - r o
t a r y - a c t u a
t o r .
h t m
l
h t t p : / / w w w . s p
i r a x s a r c o . c
o m / r e s o u r c e s / s t e a m - e n g
i n e e r i n g -
t u t o r i a
l s /
c o n t r o
l - h a r
d w a r e - e l - p n - a c
t u a t
i o n / c o n t r o l - v a l v e - a c t u a
t o r s - a n d - p o s
i t i o n -
motion actuation:
hydraulic actuator
CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Hydraulic actuators or hydraulic cylinders typi-
cally involve a hollow cylinder having a piston insertedin it.
The two sides of the piston are alternately
pressur-ized/de-pressurized to achieve controlled precise
lineardisplacement of the piston and in turn the entity con-nected
to the piston. The physical linear displacementis only along the
axis of the piston/cylinder. This designis based on the principles
of hydraulics. A familiar ex-ample of a manually operated hydraulic
actuator is ahydraulic car jack. Typically though, the term
"hydraulicactuator" refers to a device controlled by a
hydraulic
pump.
-
8/8/2019 Huang Research
5/34
typical piston actuators
typical piston actuators
motion actuator:
pneumatic actuator
Pneumatic actuators are powered by com-pressed air. They offer
rapid point-to-point linearpositioning and have a high
load-carrying capac-ity relative to their size; they are also
cheap, me-chanically simple and easy to maintain.
Pneumatic systems are extensively used inindustry, where
factories are commonly plumbedwith compressed air or other
compressed inertgases. This is because a centrally-located
andelectrically-powered compressor that powers cyl-inders and other
pneumatic devices through sole-
noid valves is often able to provide motive powerin a cheaper,
safer, more exible, and more reli-able way than a large number of
electric motorsand actuators.
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
-
8/8/2019 Huang Research
6/34
muscle wire rotate actuator
typical muscle wire
h t t p : / / w w w . a c
t i v e - r o
b o t s
. c o m
/ p r o d u c t s / m o t o r s a n d w h e e
l s / l i n e a r -
a c t u a t o r . s
h t m
l
h t t p : / / w w w .
j a m e c o . c o m
/ w e b a p p / w c s / s t o r e s
/ s e r v l e
t /
P r o d u c
t D i s p l a y ?
l a n g
I d = -
1 & s t o r e I
d = 1 0 0 0 1 & c a
t a l o g I
d = 1 0 0 0 1 & p a = 3
5 7 5 9 5
& p r o
d u c t
I d = 3
5 7 5 9 5 & k e y C o d e =
W S F & C I D = G M C
motion actuator:
muscle wire
A shape memory alloy (SMA, smart metal,memory metal, memory
alloy, muscle wire, smartalloy) is an alloy that remembers its
original, cold-forged shape: returning the pre-deformed shape
byheating. This material is a lightweight, solid-state al-ternative
to conventional actuators such as hydraulic,pneumatic, and
motor-based systems. Shape memoryalloys have applications in
industries including medi-cal and aerospace.
The three main types of shape memory alloysare the
copper-zinc-aluminium-nickel, copper-alumin-
ium-nickel, and nickel-titanium (NiTi) alloys but SMAscan also
be created by alloying zinc, copper, gold, andiron. NiTi alloys are
generally more expensive andchange from austenite to martensite
upon cooling; Mfis the temperature at which the transition to
Martensiteis nished during cooling. Accordingly, during heatingAs
and Af are the temperatures at which the trans-formation from
Martensite to Austenite starts and n-ishes. Repeated use of the
shape memory effect maylead to a shift of the characteristic
transformation tem-
peratures (this effect is known as functional fatigue,as it is
closely related with a change of microstructuraland functional
properties of the material).
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
-
8/8/2019 Huang Research
7/34
memory alloy starter kits
Image Caption
motion actuator:
shape momory alloy
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
A shape memory alloy (SMA, smart metal,memory metal, memory
alloy, muscle wire, smartalloy) is an alloy that "remembers" its
original, cold-forged shape: returning the pre-deformed shape
byheating. This material is a lightweight, solid-statealternative
to conventional actuators such as hy-draulic, pneumatic, and
motor-based systems.Shape memory alloys have applications in
indus-tries including medical and aerospace.
The three main types of shape memory al-loys are the
copper-zinc-aluminium-nickel, copper-aluminium-nickel, and
nickel-titanium (NiTi) alloys
h t t p : / / w w w . a c
t i v e - r o
b o t s
. c o m
/ p r o d u c t s / m o t o r s a n d w h e e
l s / l i n e a r -
a c t u a t o r . s
h t m
l
h t t p : / / w w w . m
i d e . c o m
/ p r o
d u c t s / s m a_
k i t / s m a_ s t a r
t e r_
k i t . p
h p
-
8/8/2019 Huang Research
8/34
lego gears
gears connectionh t
t p : / / s c
i e n c e .
h o w s
t u f f w o r
k s . c
o m / t r a n s p o r t / e n g i n e s - e q u i p m e n
t / g e a r .
h t m
mechanics of movement:
gears
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Gears are used in tons of mechanical devices.
They do several important jobs, but most important, theyprovide
a gear reduction in motorized equipment. Thisis key because, often,
a small motor spinning very fastcan provide enough power for a
device, but not enoughtorque. For instance, an electric screwdriver
has a verylarge gear reduction because it needs lots of torque
toturn screws, bu t the motor only produces a small amountof torque
at a high speed. With a gear reduction, the out-put speed can be
reduced while the torque is increased.
Another thing gears do is adjust the direction of ro-tation. For
instance, in the differential between the rearwheels of your car,
the power is transmitted by a shaft thatruns down the center of the
car, and the differential has toturn that power 90 degrees to apply
it to the wheels.
-
8/8/2019 Huang Research
9/34
Ball Caster Omni-Directional Metal
Ball Caster Omni-Directional Metal h t t p : /
/ w w w . s
p a r k
f u n . c o m / c o m m e r c e
/ p r o
d u c t
_ i n f o .
R e l e v a n t w e
b s i t e o f
t h e p r o v
i d e r
R e l e v a n t y o u t u b e v i d e o w e
b a d d r e s s
Description: A metal caster used for omni-direc-tional
robots.
Omni-what? Imagine a robot with the dual-motor gear box. The
robot can pivot in one spot, butit must also allow the other wheels
on the drive trainto move or slide during a turn. This caster
allows therobot to rotate and pivot in all directions -
omni-direc-tional - without the need for complex steering
mecha-nisms.
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
mechanics of movement
GEARS
-
8/8/2019 Huang Research
10/34
h t t p : / / s c
i e n c e .
h o w s
t u f f w o r
k s . c
o m / t r a n s p o r
t / e n g
i n e s - e q u
i p m e n
t / g e a r .
h t m
mechanics of movement
GEARS
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
On any gear, the ratio is determined by the dis-tances from the
center of the gear to the point of con-tact. For instance, in a
device with two gears, if onegear is twice the diameter of the
other, the ratio wouldbe 2:1.
One of the most primitive types of gears wecould look at would
be a wheel with wooden pegssticking out of it.
The problem with this type of gear is that thedistance from the
center of each gear to the point ofcontact changes as the gears
rotate. This means thatthe gear ratio changes as the gear turns,
meaning thatthe output speed also changes. If you used a gear
likethis in your car, it would be impossible to maintain aconstant
speed -- you would be accelerating and de-celerating
constantly.
Many modern gears use a special tooth pro lecalled an involute.
This pro le has the very importantproperty of maintaining a
constant speed ratio between
the two gears. Like the peg wheel above, the contactpoint moves;
but the shape of the involute gear toothcompensates for this
movement. See this section fordetails.
PEG WHEEL GEAR
-
8/8/2019 Huang Research
11/34
Image Caption
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
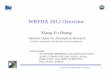
Spur gears are the most common type of gears.They have straight
teeth, and are mounted on parallelshafts. Sometimes, many spur
gears are used at onceto create very large gear reductions.
Spur gears are used in many devices that youcan see all over
HowStuffWorks, like the electric screw-driver, dancing monster,
oscillating sprinkler, windupalarm clock, washing machine and
clothes dryer. Butyou wont nd many in your car.
This is because the spur gear can be really loud.Each time a
gear tooth engages a tooth on the othergear, the teeth collide, and
this impact makes a noise.It also increases the stress on the gear
teeth.
To reduce the noise and stress in the gears,most of the gears in
your car are helical.
SPUR GEAR
-
8/8/2019 Huang Research
12/34
helical gears
gekucak gears
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Helical Gears
The teeth on helical gears are cut at an angle to theface of the
gear. When two teeth on a helical gear systemengage, the contact
starts at one end of the tooth andgradually spreads as the gears
rotate, until the two teethare in full engagement.
This gradual engagement makes helical gears op-erate much more
smoothly and quietly than spur gears.For this reason, helical gears
are used in almost all cartransmissions.
Because of the angle of the teeth on helical gears,
they create a thrust load on the gear when they mesh. De-vices
that use helical gears have bearings that can sup-port this thrust
load.
One interesting thing about helical gears is thatif the angles
of the gear teeth are correct, they can bemounted on perpendicular
shafts, adjusting the rotationangle by 90 degrees.
chanics of movement:
gears
-
8/8/2019 Huang Research
13/34
bevel gears
bevel gears
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
Bevel GearsBevel gears are useful when the direction of a
shafts rotation needs to be changed. They are usuallymounted on
shafts that are 90 degrees apart, but canbe designed to work at
other angles as well.
The teeth on bevel gears can be straight, spiralor hypoid.
Straight bevel gear teeth actually have thesame problem as straight
spur gear teeth -- as eachtooth engages, it impacts the
corresponding tooth allat once.
Just like with spur gears, the solution to thisproblem is to
curve the gear teeth. These spiral teethengage just like helical
teeth: the contact starts at oneend of the gear and progressively
spreads across thewhole tooth.
On straight and spiral bevel gears, the shaftsmust be
perpendicular to each other, but they mustalso be in the same
plane. If you were to extend thetwo shafts past the gears, they
would intersect. Thehypoid gear, on the other hand, can engage with
theaxes in different planes.
This feature is used in many car differentials.The ring gear of
the differential and the input pinion
gear are both hypoid. This allows the input pinion to bemounted
lower than the axis of the ring gear. Figure 7shows the input
pinion engaging the ring gear of thedifferential. Since the
driveshaft of the car is connectedto the input pinion, this also
lowers the driveshaft. Thismeans that the driveshaft doesnt intrude
into the pas-senger compartment of the car as much, making moreroom
for people and cargo.
mechanics of movement:
gears
h t t p : / / s c
i e n c e .
h o w s
t u f f w o r
k s . c
o m / t r a n s p o r
t / e n g
i n e s - e q u
i p m e n
t / g e a r .
h t m
h t t p : / / s c
i e n c e .
h o w s
t u f f w o r
k s . c o m
/ t r a n s p o r
t / e n g
i n e s - e q u
i p m e n
t / g e a r .
h t m
-
8/8/2019 Huang Research
14/34
worm gears
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Worm GearsWorm gears are used when large gear reduc-
tions are needed. It is common for worm gears to havereductions
of 20:1, and even up to 300:1 or greater.
Many worm gears have an interesting propertythat no other gear
set has: the worm can easily turnthe gear, but the gear cannot turn
the worm. This isbecause the angle on the worm is so shallow that
whenthe gear tries to spin it, the friction between the gearand the
worm holds the worm in place.
This feature is useful for machines such as con-veyor systems,
in which the locking feature can act asa brake for the conveyor
when the motor is not turn-ing. One other very interesting usage of
worm gears isin the Torsen differential, which is used on some
high-performance cars and trucks.
mechanics of movement:
gears
h t t p : / / s c i e n c e .
h o w s
t u f f w o r
k s . c
o m / t r a n s p o r
t / e n g
i n e s - e q u
i p m e n
t / g e a r .
h t m
-
8/8/2019 Huang Research
15/34
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
rotoary--liner
The rack and pinion is used to convert between rotaryand linear
motion. The rack is the at, toothed part, the pinionis the gear.
Rack and pinion can convert from rotary to linearof from linear to
rotary.
The diameter of the gear determines the speed that therack moves
as the pinion turns. Rack and pinions are com-monly used in the
steering system of cars to convert the ro-tary motion of the
steering wheel to the side to side motion inthe wheels.
Rack and pinion gears give a positive motion especial-ly
compared to the friction drive of a wheel in tarmac. In therack and
pinion railway a central rack between the two railsengages with a
pinion on the engine allowing the train to bepulled up very steep
slopes.
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
16/34
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
CH.09 CH.08 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Cams are used to convert rotary motion into reciprocat-ing
motion. The motion created can be simple and regular orcomplex and
irregular.
As the cam turns, driven by the circular motion, the camfollower
traces the surface of the cam transmitting its motionto the
required mechanism.
mechanics of movement:
movement conversion
CH.07
-
8/8/2019 Huang Research
17/34
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
Reciprocating motion is back and forth motion. In theexample to
the left the reciprocating motion of the piston isconverted to the
rotary motion in the crank.
Reciprocating motion is measured by its throw (thedistance
between the two extremes of motion) and by its pe-riod (the length
of time for each cycle)
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
18/34
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Geneva Stop
The Geneva stop is named after the Geneva cross,a similar shape
to the main part of the mechanism.
The Geneva stop is used to provide intermittent mo-tion, the
orange wheel turns continuously, the dark blue pinthen turns the
blue cross quarter of a turn for each revolu-tion of the drive
wheel.
The crescent shaped cut out in dark orange sectionlets the
points of the cross past, then locks the wheel inplace when it is
stationary.
The Geneva stop mechanism is used commonly in lm projectors to
move the lm on one frame at a time.
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
19/34
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
Irregular MotionIrregular motion is motion which has no
obvious
pattern to its movement. It is often needed in automata
torecreate the movements of living things.
Irregular motion is usually created using a cam orseries of
cams
Irregular motion is not often used as the startingpoint for a
mechanism. It can, however be translated andtransormed as shown
below.
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
20/34
mechanics of movement:
movement conversion
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
PulleysOn the left is a simple pulley. As the rope is
pulled down the weight moves up by the same dis-tance.
In the compound pulley on the right the ropeis wrapped around
two pulleys. As the rope is pulledthe weight, this time attached to
the lower pulley rath-er than direct to the rope, moves up slower
than thespeed that the rope is pulled.
Corresponding to this reduction in speed is anincrease in the
force on the weight.
The amount of increase in the force dependson how many times the
rope wraps round the pulleys.By wrapping the rope several times
around the pul-leys it is easily possible to lift your own weight
off theground!
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
21/34
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
Belt Drives
Belt drives are used transfer rotational mo-tion from one place
to another.
On the left, both pulleys are the same size.Drive can be
transfered by friction of the belt onthe pulley or, if required,
buy using a toothed belt.Chain drives work in a similar way.
By crossing the belt the direction of drivecan be changed.
On the right two sizes of pulley are used toshow how speed of
rotation can be changed.
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
22/34
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
Ratchet
The ratchet can be used to move a toothed wheelone tooth at a
time. The part used to move the ratchet isknown as the pawl.
The ratchet can be used as a way of gearingdown motion. By its
nature motion created by a ratchetis intermittent. By using two
pawls simultaniously this in-termittent effect can be almost, but
not quite, removed.
Ratchets are also used to ensure that motion
only occurs in only one direction, useful for windinggear which
must not be allowed to drop. Ratchets arealso used in the freewheel
mechanism of a bicycle.
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
23/34
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
Invented by Girolamo Cardano in the 16th centu-
ry the Cardan gear is a way of converting rotary motioninto
straight line motion. Watch how the red dot on theinner purple gear
exactly follows the vertical dotted line.
The outer gear has a diameter exactly twice aslarge as the inner
gear. In the above example they have40 and 20 teeth
respectively.
Cardano also invented a type of universal jointand investigated
the mathematics of probability. Under-standing the mathematics of
risk helped him make a liv-
ing from gambling until eventually he could
nd no-oneto gamble with and had to move onto new pastures...
mechanics of movement:
movement conversion
-
8/8/2019 Huang Research
24/34
Levers are an essential part of many mecha-nisms. They can be
used to change the amount, thestrength and the direction of
movement.
The position of the force and the load are inter-changeable and
by moving them to different points onthe lever, different effects
can be produced.
The xed point of the lever about which it movesis known as the
fulcrum.
In this example the force and the load move inopposite
directions.
With the force three times closer to the fulcrum
them the load lifted is only one third of the force but itmove
three times as far.
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p
i g . c
o . u k
/ m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
25/34
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
Bell Crank The bell crank is used to convert the direction
of reciprocating movement. By varying the angle of thecrank
piece it can be used to change the angle of move-ment from 1 degree
to 180 degrees.
The bell crank was originally used in large houseto operate the
servants bell, hence the name.
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
-
8/8/2019 Huang Research
26/34
Oscillating motion is motion which moves alonga path, then
returns along that same path backwardsand forwards, backwards and
forwards.
In this example the drive wheel is used to powera waving
machine, notice how the left to right move-ment is slower than the
right to left. This is becausethat left to right motion takes place
over a longer partof the drive wheels turn.
By moving the drive wheel closer to the pivot
point this effect can be exaggerated. The same mech-anism is
used in mechanical saws to provide a quickreturn after the cutting
stroke.
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
mechanics of movement:
movement conversion
h t t p : / / w w w .
y i n g - p i g . c o . u
k / m e c
h a n i s m s /
p a g e s / c a m . h
t m l
-
8/8/2019 Huang Research
27/34
mechanics of movement:
joints
ball joints are spherical bearings that connectthe control arms
to the steering knuckles. More spe-cically, a ball joint is a steel
bearing stud and socketenclosed in a steel casing. The bearing stud
is taperedand threaded. It ts into a tapered hole in the
steeringknuckle. A protective encasing prevents dirt from get-ting
into the joint assembly. Motion control ball jointstend to be
retained with an internal spring, which helpsto prevent vibration
problems in the linkage. Common-ly found in automotive throttle
linkages, throttle bodyset ups, these are also widely used on
construction
equipment, the end of gas springs and in childrenstoys.
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
-
8/8/2019 Huang Research
28/34
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01
h t t p : / / w e
b . m
i t . e d u / m e c
h e n g
/ p m
l / s p e c
_ c o n
g .
h t m
mechanics of movement:
joints
Revolute joint seen in 3-dimensional, notingthat the joint may
only move in one direction.A revolute
joint (also called pin joint or hinge joint) is a one de-gree of
freedom kinematic pair used in mechanisms.[1] Revolute joints
provide single-axis rotation func-tion used in many places such as
door hinges, foldingmechanisms, and other uni-axial rotation
devices.
-
8/8/2019 Huang Research
29/34
mechanics of movement:
joints
This type of joint is also called a Hooke-typecoupling as it was
developed from the joint inventedby Robert Hooke in the seventeenth
century. This jointis commonly used today. The joints in Fig.A and
B rep-resent the basic and developed forms respectively.They use
two yokes set at 90 degrees to each otherand a cross-shaped
trunnion block joins these yokes.
CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
h t t p : / / w w w .
t h e - c r a n
k s h a f t . i n f o / 2 0 0 9 / 0 9 / u n i v e r s a l - j
o
i n t s
. h t m l
h t t p : / / w w w .
t h e - c r a n
k s h a f t . i n f o / 2 0 0 9 / 0 9 / u n
i v e r s a l - j o
i n t s
. h t m l
-
8/8/2019 Huang Research
30/34
CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01CH.09
echanics of movement:
joints
A prismatic joint (also called sliders) is a onedegree of
freedom kinematic pair used in mecha-nisms.[1] Prismatic joints
provide single-axis slidingfunction used in places such as
hydraulic and pneu-matic cylinders.
-
8/8/2019 Huang Research
31/34
rezeppa joint
rzeppa joint
h t t p : / / w w w . m o t o m a x . p
l / e n g
/ d i v . D S
. h t m l
h t t p : / / w w w . e a r l m o r s e . o
r g / s t e a m
b o a t
i n g p a g e s / s t e a m
h a p p e n s 5
/ s t e a m -
h a p p e n s 5 . h
t m
mechanics of movement:
joint
A Rzeppa joint consists of a spherical inner with6 grooves in
it, and a similar enveloping outer shell.Each groove guides one
ball. The input shaft ts in thecenter of a large, steel,
star-shaped gear that nestsinside a circular cage. The cage is
spherical but withends open, and it typically has six openings
aroundthe perimeter. This cage and gear t into a groovedcup that
has a splined and threaded shaft attached toit. Six large steel
balls sit inside the cup grooves and t into the cage openings,
nestled in the grooves ofthe star gear. The output shaft on the cup
then runs
through the wheel bearing and is secured by the axlenut. This
joint is extremely exible and can accom-modate the large changes of
angle when the frontwheels are turned by the steering system;
typical Rz-eppa joints allow 45-48 degrees of articulation,
whilesome can give 52 degrees. At the outboard end ofthe driveshaft
a slightly different unit is used. The endof the driveshaft is
splined and ts into the outer joint.It is typically held in place
by a circlip.
CH.01 CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
-
8/8/2019 Huang Research
32/34
A cylindrical joint is a two degrees of freedomematic pair used
in mechanisms.[1] Cylindricalnts provide single-axis sliding
function as well as agle axis rotation, providing a way for two
rigid bod-to translate and rotate freely. This can be picturedan
unsecured axle mounted on a chassis, as it mayely rotate and
translate.
CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09CH.09
h t t p : / / w w w .
t h e - c r a n
k s h a f t . i n f o / 2 0 0 9 / 0 9 / u n i v e r s a l - j
o
i n t s
. h t m l
chanics of movement:
joints
1
-
8/8/2019 Huang Research
33/34
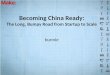
The Thompson constant velocity joint
Image Caption
h t t p : / / w w w . c e n t r a
l w e s
t e r n
d a i l y
. c o m . a
u / n e w s
/ l o c a
l / n e w s / g e n e r a
l /
t h o m p s o n - i n - a - j o
i n t - v e n
t u r e - w
i t h - b o e
i n g /
1 3 7 3 8 2 5 . a s p x
h t t p : / / w w w .
t r a n g . c
o m . a
u / c o n c e p
t s . h
t m
mechanics of movement:
research sub-topic
The Thompson constant velocity joint (TCVJ),also known as a
Thompson coupling, is a constantvelocity universal joint that can
be loaded axially andcontinue to maintain constant velocity over a
rangeof input and output shaft angles with low friction
andvibration. It consists of two cardan joints assembledwithin each
other, thus eliminating the intermediateshaft, along with a control
yoke that geometricallyconstrains their alignment. The control yoke
maintainsequal joint angles between the input shafts and a
rela-tive phase angle of zero to ensure constant angular
velocity at all input and output shaft angles. While
thegeometric con guration does not maintain constantvelocity for
the control yoke (aka intermediate cou-pling) that aligns the pair
of cardan joints, the controlyoke has minimal inertia and generates
virtually novibration. Eliminating the intermediate shaft and
keep-ing the input shafts aligned in the homokinetic planevirtually
eliminates the induced shear stresses andvibration inherent in
traditional double cardan shafts.
The use of cardan joints within the ThompsonCoupling also
reduces the wear, heat and frictionwhen compared with Rzeppa type
constant velocity
joints. Cardan joints, including Thompson couplings,utilise
roller bearings running circumferentially, where-as Rzeppa constant
velocity joints use balls which rolland slide axially along
grooves.
CH.02 CH.03 CH.04 CH.05 CH.06 CH.07 CH.08 CH.09
-
8/8/2019 Huang Research
34/34
A screw joint is a one degree of freedom kine-matic pair used in
mechanisms.[1] Screw joints pro-vide single-axis translation by
utilizing the threads ofthe threaded rod to provide such
translation. This typeof joint is used primarily on most types of
linear actua-tors and certain types of cartesian robots.
CH.09 CH.08 CH.07 CH.06 CH.05 CH.04 CH.03 CH.02 CH.01CH.09
h t t p : / / w e
b . m
i t . e d u / m e c h e n g
/ p m
l / s p e c_ c o n g .
h t m
h t t p : / / w w w .
t h e - c r a n
k s h a f t . i n f o / 2 0 0 9 / 0 9 / u n
i v e r s a l - j o
i n t s
. h t m l
mechanics of movement:
joints