-
8/6/2019 Hua Xia
1/85
UNIVERSITY OF CINCINNATI
Date:
I, ,
hereby submit this original work as part of the requirements for
the degree of:
in
It is entitled:
Student Signature:
This work and its defense approved by:
Committee Chair:
11/12/2010 1,173
2-Nov-2010
Xia Hua
Master of Science
Mechanical Engineering
Hypoid and Spiral Bevel Gear Dynamics with Emphasis on
Gear-Shaft-Bearing Structural Analysis
Teik Lim, PhDTeik Lim PhD
Xia Hua
-
8/6/2019 Hua Xia
2/85
Hypoid and Spiral Bevel Gear Dynamics with Emphasis on
Gear-Shaft-Bearing Structural Analysis
A thesis submitted to the
Division of Research and Advanced Studies
of the University of Cincinnati
in partial fulfillment of the requirements
for the degree of MASTER OF SCIENCE
in the Program of Mechanical Engineering
of the College of Engineering and Applied Science
November 2010
by
Xia Hua
B.S. Zhejiang University of Technology, Zhejiang, P.R. China,
2007
Academic Committee Chair: Dr. Teik C. Lim
Members: Dr. Ronald Huston
Dr. David Thompson
-
8/6/2019 Hua Xia
3/85
iii
ABSTRACT
Hypoid and spiral bevel gears, used in the rear axles of cars,
trucks and off-
highway equipment, are subjected to harmful dynamic response
which can be
substantially affected by the structural characteristics of the
shafts and bearings. This
thesis research, with a focus on gear-shaft-bearing structural
analysis, is aimed to develop
effective mathematical models and advanced analytical approaches
to achieve more
accurate prediction of gear dynamic response as well as to
investigate the underlying
physics affecting dynamic response generation and
transmissibility. Two key parts in my
thesis are discussed below.
Firstly, existing lumped parameter dynamic model has been shown
to be an
effective tool for dynamic analysis of spiral bevel geared rotor
system. This model is
appropriate for fast computation and convenient analysis, but
due to the limited degrees
of freedom used, it may not fully take into consideration the
shaft-bearing structural
dynamic characteristics. Thus, a dynamic finite element model is
proposed to fully
account for the shaft-bearing dynamic characteristics. In
addition, the existing equivalent
lumped parameter synthesis approach used in the lumped parameter
model, which is key
to representing the shaft-bearing structural dynamic
characteristics, has not been
completely validated yet. The proposed finite element model is
used to guide the
validation and improvement of the current lumped parameter
synthesis method using
effective mass and inertia formulations, especially for modal
response that is coupled to
the pinion or gear bending response.
Secondly, a new shaft-bearing model has been proposed for the
effective
supporting stiffness calculation applied in the lumped parameter
dynamic analysis of the
-
8/6/2019 Hua Xia
4/85
-
8/6/2019 Hua Xia
5/85
v
-
8/6/2019 Hua Xia
6/85
-
8/6/2019 Hua Xia
7/85
vii
CONTENTS
Chapter 1. Introduction
.......................................................................................................
1 1.1 Literature
Review......................................................................................................
2 1.2 Motivation, Objectives and Thesis
Organization......................................................
4
Chapter 2. Finite Element and Enhanced Lumped Parameter Dynamic
Modeling of Spiral Bevel Geared Rotor System
.....................................................................................
6
2.1 Introduction
...............................................................................................................
6 2.2 Proposed Dynamic Finite Element Model
................................................................ 7
2.3 Proposed New Lumped Parameter Synthesis Method for Existing
LumpedParameter Dynamic Model and Its Difference from the Old
Lumped ParameterSynthesis Approach
......................................................................................................
13
2.3.1 Spiral Bevel Gear 14-DOF Lumped Parameter Dynamic Model
.................... 13 2.3.2 Proposed New Lumped Parameter
Synthesis Method in Spiral Bevel Gear ... 16 14 DOF Lumped
Parameter
Model...........................................................................
16 2.3.3 Difference Between Old Lumped Parameter Synthesis Approach
and Proposed
New Lumped Parameter Synthesis Approach
.......................................................... 28 2.4
Comparison Results and Discussions
.....................................................................
28 2.5 Conclusion
..............................................................................................................
35
Chapter 3. Effect of Shaft-bearing Configurations on Spiral
Bevel Gear Mesh andDynamics
..........................................................................................................................
36
3.1 Introduction
.............................................................................................................
36 3.2 Mathematical Model
...............................................................................................
37
3.2.1 Mesh Model
.....................................................................................................
37 3.2.2 Spiral Bevel Gear 14-DOF Lumped Parameter Dynamic Model
.................... 38 3.2.3 Finite Element Modeling of 3-bearing
Straddle Mounted Pinion Configurationfor the Effective Lumped
Stiffness
Calculation........................................................
41
3.2.4 Axial Translational Stiffness Model Refinement
............................................ 44 3.3 Comparison of
3-bearing Straddle Mounted Pinion and 2-bearing OverhungMounted
Pinion on Gear Mesh and Dynamics
.............................................................
46
3.3.1 Analysis on Equivalent Shaft- bearing Stiffness Models and
Pinions Lum pedShaft-bearing Stiffness Matrices of Two Pinion
Configurations .............................. 49 3.3.2 Comparison
on Gear Dynamics
.......................................................................
52 3.3.3 Effect of 2-bearing and 3-bearing Configurations on Mesh
Model ................. 57
3.4 Conclusions
............................................................................................................
70 Chapter 4. Conclusions
.....................................................................................................
72 BIBLIOGRAPHY
.............................................................................................................
74
-
8/6/2019 Hua Xia
8/85
viii
LIST OF FIGURES
Figure2.1 Dynamic finite element model of spiral bevel geared
rotor system ................... 8 Figure2.2 Spiral bevel gear pair
dynamic model
............................................................. 11
Figure2.3 Spiral bevel gear 14 DOF lumped parameter dynamic model
....................... 16
Figure2.4 Static finite element modeling of 3-bearing straddle
mounted pinionconfiguration
.....................................................................................................................
19 Figure2.5 Axial translational stiffness model
...................................................................
20 Figure2.6 A design of beam with lumped mass
................................................................ 21
Figure2.7 Beam with lumped mass model of pinion with integrated
shaft ....................... 23 Figure2.8 Dynamic mesh forces
.......................................................................................
30 Figure2.9 Dynamic mesh forces
.......................................................................................
31 Figure2.10 Dynamic mesh forces
.....................................................................................
32 Figure2.11 Dynamic mesh forces
.....................................................................................
34 Figure2.12 Dynamic mesh forces
.....................................................................................
34 Figure2.13 Dynamic mesh forces
.....................................................................................
35
Figure3.1 Tooth load distribution generated from quasi-static
three-dimensional finiteelement tooth contact analysis program
...........................................................................
38 Figure3.2 Spiral bevel gear 14 DOF lumped parameter dynamic
model ........................ 41 Figure3.3 Static finite element
modeling of 3-bearing straddle mounted pinionconfiguration
.....................................................................................................................
44 Figure3.4 Axial translational stiffness model
...................................................................
45 Figure3.5 3-bearing straddle mounted pinion (upper) and
2-bearing overhung mounted
pinion (lower)
....................................................................................................................
49 Figure3.6 Finite element model of 3-bearing mounted pinion
(left) and finite element model of 2-bearing mounted pinion (right)
......................................................................
52 Figure3.7 Comparison of 2-bearing and 3-bearing configurations
on dynamic mesh
force
..................................................................................................................................
53
Figure3.8 Comparison of 2-bearing and 3-bearing configurations
on modal strain energydistribution
........................................................................................................................
54 Figure3.9 Comparison of 2-bearing and 3-bearing configurations
on dynamic bearingload
...................................................................................................................................
56 Figure3.10 Comparison of 2-bearing and 3-bearing configurations
on pinion response 57 Figure3.11 Effect of pilot bearing position
on mesh point for 3-bearing case ................. 58 Figure3.12
Effect of tapered roller bearing position on mesh point for
3-bearing case .. 59 Figure3.13 Effect of tapered roller bearing
position on mesh point for 2-bearing case .. 60 Figure3.14
Comparison of 2-bearing and 3-bearing configurations on mesh point
....... 61 Figure3.15 Effect of pilot bearing position on
line-of-action vector for 3-bearing case . 62
Figure3.16 Effect of tapered roller bearing position on
line-of-action vector for 3-bearing case
......................................................................................................................
63 Figure3.17 Effect of tapered roller bearing position on
line-of-action vector for 2-bearing case
......................................................................................................................
64 Figure3.18 Comparison of 2-bearing and 3-bearing configuration
on line-of-actionvector
.................................................................................................................................
65 Figure3.19 Effect of pilot bearing position on mesh stiffness
for 3-bearing case ............ 66
-
8/6/2019 Hua Xia
9/85
ix
Figure3.20 Effect of tapered roller bearing position on mesh
stiffness for 3-bearing
case...........................................................................................................................................
67 Figure3.21 Effect of tapered roller bearing position on mesh
stiffness for 2-bearing
case...........................................................................................................................................
67 Figure3.22 Comparison of 2-bearing and 3-bearing configuration
on mesh stiffness .... 68
Figure3.23 Comparison on dynamic mesh force without considering
the difference of mesh stiffness
....................................................................................................................
69 Figure3.24 Comparison on dynamic mesh force considering the
difference of meshstiffness
..............................................................................................................................
69
-
8/6/2019 Hua Xia
10/85
1
Chapter 1. Introduction
Hypoid and spiral bevel gears are widely used as final set of
reduction gear pairs
in the rear axles of trucks, cars and off- highway equipment to
transmit engines power to
the drive wheels in non-parallel directions. The hypoid and
spiral bevel gear dynamics
becomes more and more significant for the concern of noise and
durability, because
under dynamic condition the mesh force acting on gear teeth are
amplified which
potentially reduces the fatigue life of gears and the large
dynamic force can be
transmitted to housing which causes structure-born gear whine.
Accordingly, it is needed
to perform in-depth investigation on hypoid and spiral bevel
geared system dynamic
response and resonance characteristics to form a deeper
understanding in the physics
controlling dynamic force generation and transmissibility to
achieve superior design for
quiet and durable driveline. Though it is the fact that much is
known about dynamic
characteristics in parallel axis gear system, research on the
dynamics of nonparallel axis
geared systems such as hypoid and spiral bevel gears is not
mature.
Most previous analytical work mainly focuses on gear mesh
modeling and its
application to analyze gear pair dynamics, nonlinear
time-varying gear pair dynamic
analysis considering gear backlash, time-varying mesh
characteristics, mesh stiffness
asymmetry effects and friction, coupled multi-body gear pair
dynamic and vibration
analysis and so on. Very little amount of attention is given to
the gear-shaft-bearing
structure of the geared rotor system. The goal of this thesis is
to gain a better
understanding on the effect of gear-shaft-bearing structural
design on hypoid and spiral
bevel gear system dynamics and to establish new computational
models more accurately
accounting for gear-shaft-bearing dynamic characteristics.
-
8/6/2019 Hua Xia
11/85
2
1.1 Literature Review
Dynamics of parallel axis geared rotor system has been studied
extensively[1-14].
Papers by Ozguven and Houser[1] and Blankenship and Singh[2]
provide a
comprehensive review of mathematical models used to investigate
dynamics of parallel
axis geared rotor system. Among these studies, a special
attention has been paid on gear-
shaft-bearing structure rather than the dynamics of the gear
itself. In 1975, Mitchell and
Mellen[3] indicate the torsional-lateral coupling in a geared
rotor system by conducting
experiment study. In 1981, Hagiwara, Ida[4] analytically and
experimentally studied the
vibration of geared shafts due to run-out unbalanced and run-out
errors and it is observed
that both torsional and lateral modes could be excited by gear
errors and unbalanced
forces. In 1984, Neriya, Bhat and Sankar[5] studied the effect
of coupled torsional-
flexural vibration of a geared shaft system on dynamic tooth
load by using lumped
parameter dynamic model in which equivalent lumped springs were
used to represent the
flexibility of shaft-bearing structure. In 1985, Neriya, Bhat
and Sankar[6] used finite
element method to model the geared rotor system and introduced
the coupling between
torsion and flexure at the gear pair location. In 1991, Lim and
Singh[7] developed linear
time-invariant, discrete dynamic models of a generic geared
rotor system based on their
newly proposed bearing matrix formulation by using lumped
parameter and dynamic
finite element techniques to predict the vibration
transmissibility through bearing and
mounts, casing vibration motion, and dynamic response of the
internal rotating system. In2004, Kubur and Kahraman[8] proposed a
dynamic model of a multi-shaft helical gear
reduction unit formed by N flexible shafts by finite elements.
This model has an accurate
-
8/6/2019 Hua Xia
12/85
3
representation of shafts and bearings as well as gears, which is
used to study the influence
of some key gear-shaft-bearing structure parameters.
Though large numbers of research has been done on parallel axis
gear dynamics,
the research on dynamics of right-angle geared rotor system such
as bevel and hypoid
gear is still scanty. In recent years, a group led by Lim[15-19]
began to develop the
dynamic model of right-angle hypoid and spiral bevel geared
rotor system and analyze
the dynamic characteristics of hypoid and spiral bevel geared
rotor system. In one of the
study, Cheng and Lim[15] developed the single-point gear
mesh-coupling model based
on both unloaded and loaded exact gear tooth contact analysis.
This mesh model is thenapplied to develop multiple
degrees-of-freedom, lumped parameter model of the hypoid
and spiral bevel geared rotor system for linear time-invariant
and nonlinear time-varying
analysis. In 2002, Wang, H. and Lim[16] developed a multi-point
gear mesh-coupling
model based on Cheng single point gear mesh -coupling model and
applied it to dynamic
analysis of hypoid and spiral bevel geared rotor system. In the
same year, Jiang and
Lim[17] formulated a low degrees of freedom torsional dynamic
model to analyze the
nonlinear phenomenon through both analytical and numerical
solutions. In 2007, based
on the low degrees of freedom torsional dynamic model, Wang, J.
and Lim[18] extended
Jiangs work and further investigated the influence of time
-varying mesh parameters and
various nonlinearities on gear dynamics. In 2010, through
developing various more
accurate high degrees of freedom lumped parameter dynamic
models, Tao and Lim[19]
examines torque load effect on gear mesh and nonlinear
time-varying dynamic responses,
coupled multi-body dynamics and vibration, influence of the
typical rotor dynamic factor
-
8/6/2019 Hua Xia
13/85
4
on hypoid gear vibration, effect of manufacturing error or
assembly error on gear
dynamics and the interaction between internal and external
excitations.
1.2 Motivation, Objectives and Thesis Organization
From above literature review, it could be observed that most of
the research on
hypoid and bevel geared rotor system dynamics is concerned with
gear mesh dynamics so
the flexibility of gear-shaft-bearing structure is simply
represented by equivalent
supporting springs or even ignored in much study only focusing
on the effect of gear
mesh characteristics. Very little attention has been paid to the
detailed modeling and
analysis of gear-shaft-bearing structure for the concern of
dynamics of the whole geared
rotor system. Therefore, in this thesis, an attention will be
given to the gear-shaft-bearing
structural analysis to achieve more accurate prediction of gear
dynamic response and to
investigate the effect of shaft and bearing design on gear
dynamics.
Chapter 1 presents the general introduction, literature review,
motivation and
objective for this thesis research. It discusses current
progress in gear dynamics research
and the limitations of the research on hypoid and spiral bevel
gear dynamics. The
discussion further illustrates the objectives of this thesis,
which is to perform study on
dynamics of hypoid and spiral bevel geared rotor system with
emphasis on the gear-shaft-
bearing structural modeling and analysis.
Chapter 2 proposes a finite element dynamic model of hypoid and
spiral bevelgeared rotor system to fully account for dynamic
characteristics of gear-shaft-bearing
structure. In addition, the proposed finite element dynamic
model is used to guide the
improvement of the existing lumped parameter dynamic model using
effective mass and
-
8/6/2019 Hua Xia
14/85
5
inertia formulations, especially for modal response that are
coupled to the pinion or gear
bending.
Chapter 3 proposes a new shaft-bearing model for the effective
supporting
stiffness calculation for the lumped parameter dynamic analysis
of the hypoid and spiral
bevel geared rotor system with 3-bearing straddle-mounted pinion
configuration. In
addition, two typical gear-shaft-bearing configurations used in
automotive application are
compared for their different contribution to the hypoid and
spiral bevel gear mesh and
dynamics. Parametric study is also performed to analyze the
effect of gear-shaft-bearing
configuration on gear mesh and dynamics.Chapter 4 gives a
summary of the significant achievement of this thesis research
and the recommendations for future work.
-
8/6/2019 Hua Xia
15/85
6
Chapter 2. Finite Element and Enhanced Lumped Parameter
Dynamic
Modeling of Spiral Bevel Geared Rotor System
2.1 Introduction
Along with the operating speed of geared rotor system growing
higher, the
dynamics of geared system becomes more and more significant for
the concern of noise
and durability, because under dynamic condition the mesh force
acting on gear teeth are
amplified which potentially reduces the fatigue life of gears
and the large dynamic force
can be transmitted to housing which causes structure-born gear
whine.
Dynamics of gear systems have been studied extensively [1-14].
Though it is the
fact that much is known about dynamic characteristics in
parallel axis gear system,
research on the dynamics of nonparallel axis geared systems such
as hypoid and spiral
bevel gears is not mature. In recent years, a group led by Lim
[15-19] began to develop
the dynamic model of spiral bevel geared rotor system and
analyze the dynamic
characteristics of spiral bevel geared rotor system. In one of
the study, Cheng and Lim
[15] developed the single-point gear mesh-coupling model based
on the exact spiral bevel
gear geometry. This mesh model is then applied to develop
multiple degrees-of-freedom,
lumped parameter model of the spiral bevel geared rotor system.
Later, based on this
model, Tao and Lim [19] investigated the influence of various
gear system parameters on
dynamic characteristics of the spiral bevel geared rotor system.
However, due to limiteddegrees of freedom, the lumped parameter
model may not fully take into account the
shaft-bearing dynamic characteristics and also the lumped
parameter synthesis method
used in this model is not mature.
-
8/6/2019 Hua Xia
16/85
7
In this paper, two modeling methods of spiral bevel geared rotor
dynamic system,
i.e. the finite element dynamic modeling and the enhanced
equivalent lumped parameter
synthesis, are introduced and compared. This first objective of
this paper is to develop a
dynamic finite element model which could better take into
account and describe the
shaft-bearing dynamic characteristics than the multiple
degrees-of-freedom, lumped
parameter dynamic model [15]. The second objective is to develop
a more accurate
lumped point parameter synthesis method fully considering the
shaft-bearing structural
characteristics in existing lumped parameter model [15] and
compare with the proposed
dynamic finite element model.
2.2 Proposed Dynamic Finite Element Model
As shown in Figure2.1, the mass/inertia of the pinion head and
ring gear is
separately lumped at one node and the two nodes have mesh
coupling between them.
The mass/inertia of the differential is lumped at one node. The
pinion shaft and gear shaft
are modeled with beam elements, for which consistent mass matrix
is used. The bearings
are modeled as stiffness matrices according to a bearing
stiffness formulation[21,22]. The
engine and load are separately represented by one node. All
nodes of the system
respectively have 6 DOFs except for the two nodes representing
the engine and load
which only have torsional DOFs. The system totally has 17 nodes
and accordingly
922*115*6 DOFs.
-
8/6/2019 Hua Xia
17/85
8
Figure2.1 Dynamic finite element model of spiral bevel geared
rotor system
The stiffness and mass matrices of each beam element are
determined and
assembled to form stiffness ][ spK and mass ][ sp M matrices of
pinion shaft and stiffness
][ sgK and mass ][ sg M matrices of gear shaft. Overall shaft
stiffness and mass matrices
of the system are then assembled as ]][][[][ sgsps K K DiagK
and
].][][[][ sgsps M M Diag M
The engine and load are separately connected to one node at
pinion shaft and one
node at gear shaft with torsional springs. The stiffness
matrices of the torsional spring
elements used to connect the engine and pinion shaft and to
connect the load and gear
-
8/6/2019 Hua Xia
18/85
9
shaft could be written in terms of individual torsional spring
stiffness as ][ tspK and ][ tsgK ,
both of which are 7 by 7. The overall stiffness matrices of
torsional spring elements of
the whole system could be written as ]].[][[][ tsgtspts K K
DiagK The overall mass
matrices of engine and load of the whole system could be written
in terms of torsional
moment of inertia of engine and load L E I I , as ].[][ , L E L
E I I Diag M
In industry, pinion shaft is usually supported by 2 or 3
bearings and gear shaft is
usually supported by 2 bearings. Suppose that the system has a
total of n bearings, the
overall bearing stiffness matrix of the whole system could be
written by assembling the
individual bearing element stiffness matrices )1]([ ntoiK bi
as
].][][][][[][ 321 bnbbbb K K K K K
The gear stiffness coupling matrix which represents the mesh
coupling between
the two nodes representing pinion head and ring gear could be
derived from the free
vibration equations of motion of spiral bevel gear pair. The
dynamic model of the spiral
bevel gear pair is shown in Figure2.2. The pinion and gear,
which are both built as rigid
body, are connected by linear gear mesh spring and damper. Using
a quasi-static three-
dimensional finite element tooth contact analysis program[23,24]
and concept of contact
cells[15], the averaged mesh point, averaged line-of-action,
averaged mesh stiffness and
loaded transmission error are obtained to represent the mesh
spring connecting point,
mesh spring direction , mesh spring stiffness and transmission
error excitation between
pinion and gear. Pinion and gear are both allowed to move in 6
directions so the gear pair
dynamic system totally has 12 degrees of freedom. The
generalized coordinates of pinion
and gear are separately expressed as
-
8/6/2019 Hua Xia
19/85
10
T gzgygxggg pz py px p p p pg z y x z y xq },,,,,,,,,,,{}{ . The
undamped free vibration
equations of motion for this gear pair dynamic system could be
expressed as:
0
0
00
0
0
0
0
0
0
0
0
gmgxmgmgymgzgz
gmgzmgmgxmgygy
gmgymgmgzmgxgx
gzmgg
gymgg
gxmgg
pm pxm pm pym pz pz
pm pzm pm pxm py py
pm pym pm pzm px px
pzm p p
pym p p
pxm p p
y pnk x pnk I
x pnk z pnk I
z pnk y pnk I pnk zm
pnk ym
pnk xm
y pnk x pnk I
x pnk z pnk I
z pnk y pnk I
pnk zm
pnk ym
pnk xm
(1)
where, ),,( lzlylx nnn is the line-of-action vector, ),,( lmlmlm
z y x ),( q pl is the
mesh point vector. q pl , refers to pinion and gear local
coordinate systems
respectively. mk is mesh stiffness. p is relative displacement
between pinion and gear
along line-of-action and is expressed as:
px pm pz py pm pz pz pm py px pm py
py pm px pz pm px pz p py p px pgxgmgzgygmgz
gzgmgygxgmgygygmgxgzgmgxgzggyggxg
n yn xn xn z
n zn yn zn yn xn yn x
n xn zn zn yn zn yn x p
(2)
Combining equations (1-2), a clearer equation of motion could be
obtained as:
0}]{[}]{[ pg pg pg pg qk qm (3)
here,
],,,,,,,,,,,[][ gzgygxggg pz py px p p p pg I I I mmm I I I
mmmdiagm (4)
-
8/6/2019 Hua Xia
20/85
11
}{}{}{}{
}{}{}{}{
][
gT
gm pT
gm
gT
pm pT
pm
pg
hhk hhk
hhk hhk
k (5)
Here, }{ ph and }{ gh are the coordinate transformation vectors
between the spiral
bevel gear line-of-action direction and generalized coordinate
directions for pinion and
gear separately. They are expressed as:
),(},,,,,{}{ q plnnnh lzlylxlzlylxl , (6)
),(},,-{},,{ q pln yn xn xn zn zn y lxllyllzllxllyllzllzlylx .
(7)
Figure2.2 Spiral bevel gear pair dynamic model
The gear mesh stiffness matrix ][ pgk and the mass matrix ][ pgm
of the gear pair
can be obtained from Equations (3-7). The overall gear mesh
stiffness and mass matrices
of the whole system could be obtained as ]][[][ pg pg k DiagK
and
]][[][ pg pg m Diag M .
-
8/6/2019 Hua Xia
21/85
12
The mass and stiffness matrices of the whole dynamic finite
element system are
derived as ][][][][ , L E s pg M M M M , ].[][][][][ tsbs pg K K
K K K
The system proportional damping is assumed in this model as
][])[][]([][ pgmtsbss K K K K C (8)
where, s is the system damping ratio, m is the mesh damping
ratio.
The excitation of the whole system could be written as
)()(]}{}{[)}({ t e jck hht F mmT
g p
(9)
The equation of motion of the whole spiral bevel geared rotor
system could be
expressed as
)}({)}(]{[)}(]{[)}(]{[ t F t X K t X C t X M . (10)
The direct method is applied here to calculate the steady state
forced response as
)}({)]([)}({ 1 t F H t X . (11)
The dynamic response of pinion head and ring gear could be
derived from )(t X as
}.{}, g p X X The dynamic transmission error is expressed as
}.}{{}}{{ gg p pd X h X h (12)
The dynamic mesh force in line-of-action direction is expressed
as
)()( 00 d md mm ck F .(13)
where, mk is mesh stiffness; mmm k c is mesh damping; 0 is
loaded
transmission error.
The given spiral bevel geared rotor system in Figure2.1 is an
example used to
explain proposed dynamic finite element modeling theory. The
same theory could be
-
8/6/2019 Hua Xia
22/85
13
applied to spiral bevel geared rotor system with other kinds of
pinion or gear
configurations.
2.3 Proposed New Lumped Parameter Synthesis Method for Existing
Lumped
Parameter Dynamic Model and Its Difference from the Old Lumped
Parameter
Synthesis Approach
2.3.1 Spiral Bevel Gear 14-DOF Lumped Parameter Dynamic
Model
The spiral bevel gear 14-DOF lumped parameter dynamic model[15]
used in
this study comprises of a spiral bevel gear pair, an engine
element and a load element
as shown in Figure2.3. Engine and load respectively have 1 DOF
which is torsional
coordinate. Pinion and gear are both modeled as rigid body which
separately have 6
DOFs. Torsional springs are used to connect pinion and engine as
well as to attach
gear and load. Pinion and gear have mesh coupling. mk is the
averaged mesh stiffness
and TE is the static transmission error. Since pinion and gear
are built as rigid body,
their mass and inertia are lumped at each lumped point. Lumped
shaft-bearing springs
are connected to each lumped point of pinion and gear to support
pinion and gear.
The equation of motion could be expressed as:
)}({}]{[}]{[}]{[ t F qK qC q M
(14)
The generalized coordinates are expressed as:
T L
T g
T p E qqq },}{,}{,{}{
(15)
T lzlylxllll z y xq },,,,,{}{ . (l = p, g) . (16)
The lumped mass matrix is described as:
-
8/6/2019 Hua Xia
23/85
14
],,,,,,,
,,,,,,[][
Lgzgygxgzgygx
pz py px pz py px E
I I I I M M M
I I I M M M I diag M
(17)
]][][[]][[]][[][ tsgtsp pgll K K DiagK DiagK DiagK
(18)
Here, ][ llK is the lumped shaft-bearing stiffness matrix of
pinion and gear.
][ pgK is the gear mesh coupling stiffness matrix. ][ tspK is
the coupling stiffness
matrix of the torsional spring used to connect pinion and
engine. ][ tsgK is the
coupling stiffness matrix of the torsional spring used to
connect gear and load.
The damping [C] is assumed to be system proportional, which is
expressed as:
]][[]])[][[]][[(][ pgmtsgtsplls K DiagK K DiagK DiagC (19)
where s is system damping ratio and m is mesh damping ratio.
The force vector )}({ t F at the right side of Equation (14)
is,
)()(]}{},{[)}({ t e jck hht F mmT
g p
(20)
Here,
}{ ph
and }{ gh are the coordinate transformation vectors between
the
spiral bevel gear line-of-action direction and generalized
coordinate directions for
pinion and gear separately. They are expressed as,
},,,,,{}{ lzlylxlzlylxl nnnh , (21)
},,-{},,{ lxllyllzllxllyllzllzlylx n yn xn xn zn zn y . (22)
Here {nlx , n ly , n lz } is the line-of-action vector; {xl , y
l , z l } is the mesh point
vector; l = p, g refers to pinion and gear local coordinate
systems seperately.
The dynamic transmission error d is solved in frequency domain
and
expressed as,
-
8/6/2019 Hua Xia
24/85
15
}{}{ gg p pd qhqh
. (23)
The dynamic mesh force along line-of-action direction is
expressed as:
)()(00
d md mmck F
.(24)
Here, mk is mesh stiffness; mmm k c is mesh damping; 0 is
loaded
transmission error.
The deficiency of this model lies in that it is a lack of a
fully validated method
to synthesize the lumped point parameters, i.e. the lumped
shaft-bearing stiffness
matrix ][ llK , lumped mass/inertia of pinion pz py px pz py px
I I I M M M ,,,,, and lumped
mass/inertia of gear gzgygxgzgygx I I I M M M ,,,,, , which is
key to representing shaft-
bearing structural dynamic characteristics. It may cause
inaccurate dynamic response
prediction if the lumped point parameters are not well
determined.
-
8/6/2019 Hua Xia
25/85
16
Figure2.3 Spiral bevel gear 14 DOF lumped parameter dynamic
model
2.3.2 Proposed New Lumped Parameter Synthesis Method in Spiral
Bevel Gear
14 DOF Lumped Parameter Model
The basic idea of proposed lumped parameter synthesis method is
to
approximate the continuous parameter models of pinion and gear
to lumped
parameter models while having the same 1st
order pinion and gear bending modes.
2.3.2.1 Equivalent Lumped Shaft-bearing Stiffness
Calculation
Static finite element model of 3-bearing straddle mounted
pinion
configuration is shown in Figure2.4. The reason to do this
static finite element
-
8/6/2019 Hua Xia
26/85
17
modeling is to calculate the pinions equivalent shaft -bearing
stiffness relative to
the lumped point. The pinion with integrated shaft is modeled
with several
uniform cross-section beam elements. Bearing is modeled as
bearing stiffness
matrix calculated following a bearing stiffness
formula[21,22].
Add a unit load at lumped point and then the equation for this
static finite
element model could be expressed as:
}{}{}{ S RP (25)
Here ,{P} represents the external load exerted at all the nodes;
{R}
represents the reaction load at all the nodes; [ S] is the
assembled stiffness matrix;
{ } represents the displacements of all the nodes.
A more detailed equation could be drawn from (25) as:
S
F
SSSF
FSFF
S
F
S
F
SS
SS
R
R
P
P(26)
Here, P F means the external load exerted at the nodes at the
part of pinion
with integrated shaft. P S means the external load at the nodes
at the bearing outer
races. RF represents the reaction load at the nodes at the part
of pinion with
integrated shaft. RS represents the reaction load at the nodes
at the bearing outer
races. F represents the displacement of the nodes at the part of
pinion with
integrated shaft. S represents the displacement of the nodes at
the bearing outer
races.
Since the reaction load is only exerted at the nodes at the
bearing outer
races and the nodes at the bearing outer races are fixed, RF and
S in equation (26)
could be set to be zeros,
-
8/6/2019 Hua Xia
27/85
18
0
0 F
SSSF
FSFF
SS
F
SS
SS RP
P
.(27)
Thus, (28) could be drawn from (27) as:
F FF F PS 1 . (28)
The lumped point displacement { l1 } could be got from {F }.
The
relationship among the unit external load at the lumped point {
lP1 }, the
displacement of the lumped point{ l1 } and the equivalent
shaft-bearing stiffness
relative to the lumped point ][ llK could be expressed as:
}{}{ 11 llll K P . (29)
Following above procedure, by adding a unit load in other five
directions
separately to the lumped point, the lumped point displacements
corresponding to
each unit load could be calculated and obtained, which are
written as
)6,5,4,3,2(}{ ili . The unit load at the lumped point in each of
other 5 directions
could be written as )6,5,4,3,2(iP li . Similarly, the following
formulation
could be obtained as:
)6,5,4,3,2(}{}{ iK P lillli (30)
Combining (29) and (30),
]][[][ 654321654321llllllllllllll K PPPPPP (31)
So, the equivalent shaft-bearing stiffness relative to the
lumped point
][ llK could be calculated as:
1654321654321 ]][[][
llllllllllllll PPPPPPK (32)
-
8/6/2019 Hua Xia
28/85
19
Figure2.4 Static finite element modeling of 3-bearing straddle
mounted pinionconfiguration
However, the equivalent shaft-bearing stiffness calculated from
static
finite element model may not accurately describe the equivalent
axial translational
stiffness. So the axial translational stiffness model of
3-bearing straddle mounted
pinion configuration shown in Figure2.5 is developed in order to
refine the axial
translational stiffness described by equivalent shaft-bearing
stiffness ][ llK
calculated from static finite element model. In Figure2.5, K b1
and K b2 are axial
translational stiffness of bearing1 and bearing2. K s1 is shaft
axial stiffness from
load point to center of bearing1. K s2 is shaft axial stiffness
from center of bearing1
to center of bearing2. K c is additional cascade stiffness with
bearing2 to represent
the shaft-bolt-york between the center of bearing2 and inner
race of bearing2. K hb
is housing bolt stiffness.
-
8/6/2019 Hua Xia
29/85
20
Figure2.5 Axial translational stiffness model
The axial translation stiffness of ][ llK calculated from static
FE model
does not take K c and K hb into account. The refinement should
be made according
to Figure2.5 in the following way. Before doing finite element
calculation, the
cascade stiffness K s3 should be added into the axial
translation stiffness of
bearing2 K b2. After doing static finite element modeling, the
temporary equivalent
shaft-bearing stiffness is obtained. Then the temporary
equivalent shaft-bearing
stiffness should add K hb into its axial translation stiffness
to get the eventual
-
8/6/2019 Hua Xia
30/85
21
equivalent lumped shaft-bearing stiffness of the 3-bearing
straddle mounted
pinion.
The equivalent lumped shaft-bearing stiffness of other pinion
and gear
configurations could be calculated in the similar way[19].
2.3.2.2 Effective Lumped Mass and Inertia Calculation
The first step is to generate the first bending mode shape
functions of
pinion with integrated shaft and gear with integrated shaft. The
Initial Parameter
Method[20] used in this paper to calculate first bending mode
shape function is
described using the coordinate system I defined below as Figure
2.6. This methodhas been proved to be valid for dynamical
calculation for beam with arbitrary
peculiarities and different boundary conditions.
Figure2.6 A design of beam with lumped mass
In Figure 2.6., the dotted line at y=0 which is the left end
represents an
arbitrary type of support. Transverse displacement 0 z , angle
of rotation 0 ,
bending moment 0 M and shear force 0Q at y=0 are called initial
parameters.
State parameters transverse displacement z(y), angle of rotation
)( y , bending
-
8/6/2019 Hua Xia
31/85
22
moment )( y M , shear force )( yQ at any position y may be
presented in the
following forms (Bezukhov et al, 1969; Babakov, 1965; Ivovich,
1981)[20].
)]([)]([)]([11
)()()()()(
22
2
302000
iiiiiiii y yk U J y yk V z M k y yk V R
k EI k
EI k
kyV Q
EI k
kyU M
k
kyT kyS z y z
(33)
)]([)]([)]([11
)()()()()(
22
20000
iiiiiiii y yk T J y yk U z M k y yk U R
k kEI
EI k
kyU Q
kEI kyT
M kySk kyV z y
(34)
)]([)]([)]([1
)()()()()(
22
0002
0
iiiiiiii y yk S J y yk T z M k y yk U R
k
k kyT
QkyS M EIk kyV EIk kyU z y M
(35)
)]([)]([)]([)()()()()(
22
002
03
0
iiiiiiii y yk V J k y yk S z M y yk S R
kySQk kyV M EIk kyU EIk kyT z yQ
(36)
Where M i = lumped masses (note: M 0 = bending moment at
x=0)
Ji = moment of inertia of a lumped mass
R i =concentrated force (active or reactive)
yi = distance between origin and point of application R i or M
i
zi, i = vertical displacement and slope at point where
lumped
mass M i is located
S(y), T(y), U(y), V(y) = Krylov-Duncan functions
-
8/6/2019 Hua Xia
32/85
23
)sin(sinh2
1)(
)cos(cosh2
1)(
)sin(sinh2
1)(
)cos(cosh2
1)(
kykykyV
kykykyU
kykykyT
kykykyS
k= 4 2 EI m
, m is line density of the uniform beam, is radian
natural frequen cy, E is Youngs Modulus, I is rotary inertia of
the cross -sectional
area.
This theory could generally be applied to the pinion and gear of
spiral
bevel geared rotor system. Here, take an overhung mounted and
simply supported
pinion for example as Figure 2.7. The pinion is modeled as a
uniform beam with a
lumped mass at the lumped point a .
Figure2.7 Beam with lumped mass model of pinion with integrated
shaft
-
8/6/2019 Hua Xia
33/85
24
Accordingly, transverse displacement z(y), angle of rotation )(
y ,
bending moment )( y M , shear force )( yQ at any position y of
the pinion model
shown in Figure2.7 could be expressed by using the Initial
Parameter Method[20]
as:
)]([)()]([)(1
)]([1
)]([11
)()()()()(
22
2
212
302000
a yk U a J a yk V a Mzk EI k
c yk V Rk
b yk V Rk EI k
EI k kyV
Q EI k kyU
M k kyT
kyS z y z
(37)
)]([)()]([)(1
)]([1
)]([11
)()()()()(
22
21
20000
a yk T a J a yk U a Mzk kEI
c yk U Rk
b yk U Rk kEI
EI k kyU Q
kEI kyT M kySk kyV z y
(38)
)]([)(
)]([)()]([1
)]([1
)()()()()(
2
2
21
0002
0
a yk Sa J
a yk T a Mzk c yk U Rk b yk U Rk
k kyT
QkyS M EIk kyV EIk kyU z y M
(39)
)]([)(
)]([)()]([)]([
)()()()()(
2
221
002
03
0
a yk V akJ
a yk Sa Mzc yk S Rb yk S R
kySQk kyV M EIk kyU EIk kyT z yQ
(40)
The boundary condition could be described as:
0)(;0)(;0)(;0)(;0;0 00 d Qd M c zb zQ M .
Substitute the boundary condition into (37-40) and get the
following
equation.
-
8/6/2019 Hua Xia
34/85
25
0)]([)()]([)(1
)()()(
22
2
00
abk U a J abk V a z M
k EI k
k kbT
kbS zb z
(41)
0)]([)()]([)()]([1
1)()()(
22
1
200
ack U a J ack V a z M
k bck V R
k
EI k k kcT
kcS zc z
(42)
0)]([)()]([)()]([1
)]([1
)()()(
22
2
102
0
ad k Sa J ad k T a z M k
cd k T Rk
bd k T Rk
kd EIkV kd U EIk zd M
(43)
0)]([)()]([)()]([
)]([)()()(22
2
12
03
0
ad k V akJ ad k Sa z M cd k S R
bd k S Rkd U EIk kd T EIk zd Q
(44)
Displacement and angle of rotation at y=a are expressed as:
k kaT
kaS za z)(
)()( 00 (45)
)()()(00
kaSk kaV za (46)
Therefore, the homogeneous system of equations is obtained. If
and only
if the following determinant, which represents the frequency
domain, is zero, the
system has a non-trivial solution.
0][ 4321T r r r r (47)
where,
-
8/6/2019 Hua Xia
35/85
26
T
kaSabk JU EI k
kaT abk MV EI k k
kbT
kaV abk JU kEI
kaSabk MV EI k
kbS
r
00
)()]([)()]([)(
)()]([)()]([)(
2
2
4
2
2
3
2
1
(48)
T
EI k
bck V
kaSack JU EI k
kaT ack MV EI k k
kcT
kaV ack JU kEI
kaSack MV EI k
kcS
r
0
)]([
)()]([)()]([)(
)()]([)()]([)(
3
2
2
4
2
2
3
2
2
(49)
T
cd k T k
bd k T k
kaSad k JSkaT ad k T k M
kd EIkV
kaV ad k JSk
kaSad k MT kd U EIk
r
)]([1
)]([1
)()]([)()]([)(
)()]([)()]([
)(
2
2
2
22
2
3
(50)
T
cd k S
bd k S
kaSad k kJV k
kaT ad k MSkd U EIk
kaV ad k JV k kaSad k MSkd T EIk
r
)]([
)]([
)()]([)()]([
)(
)()]([)()]([)(
22
2
2223
4
(51)
Multiple solutions of k which are expressed as k 1, k 2, k 3, k
4, k 5 could be
solved from above equation. k 1, the smallest value of k, is for
the first bending
mode. Substitute the value of k 1 to the equation. After
cleaning, then 0 z , 1 R , 2 R
-
8/6/2019 Hua Xia
36/85
27
could be expressed in terms of 0 . Substitute the relationship
),( 00 f z
)(),( 0201 f R f R to (37,38) to solve mode shape function z(y),
)( y .
Then according to balance of kinetic energy at the first bending
mode, the
first equation could be expressed as:
)(5.0)(5.0
)(5.0)(5.0)()(5.0
22
222
0
a I a z M
a J a z M dy y z ym
effectiveeffective
d
(52)
Where, effective M and effective I are pinions effective mass
and effective
moment of inertia that need to be solved.
As for the model in Figure2.7, the lumped stiffness relative to
Point a and
the first bending natural frequency could be obtained as 22][ aK
and 1 . As the
continuous parameter model in Figure2.7 and its equivalent 2DOF
lumped
parameter model should have the same first bending nature
frequency 1 . The
second equation could be expressed according to 1 as:
00
0][
21
effective
effectivea I
M K (53)
According to equation (52) and (53), the effective mass
effective M and
effective moment of inertia effective I could be obtained.
Then, in equation (17), the lumped mass and inertia of pinion
could be
express as:
effective pz px M M M , effective pz px I I I (54)
total py M M , torsion py J I (55)
-
8/6/2019 Hua Xia
37/85
28
Where, total M is the total mass of pinion. torsion J is the
torsional moment of
inertia of pinion. Note, x is in horizontal direction, y is in
axial direction, z is in
vertical direction.
torsiontotal J M , are directly used for py py I M , since
pinion does not have
torsional and axial translational deformation when the geared
rotor system is
excited at relatively low frequency.
The lumped mass and inertia of pinion or gear with other kinds
of
configurations could also be calculated by following the
procedure above, which
is not explained in detail here.
2.3.3 Difference Between Old Lumped Parameter Synthesis Approach
and Proposed
New Lumped Parameter Synthesis Approach
The new lumped parameter synthesis approach and the old lumped
parameter
synthesis approach have the same process of equivalent lumped
shaft-bearing
stiffness calculation. While, the old lumped synthesis approach
simply treats the total
mass/inertia of pinion or gear as lumped mass/inertia, and by
contrast, the new
lumped synthesis approach calculates and uses the effective
mass/inertia of pinion or
gear as the lumped mass/inertia.
2.4 Comparison Results and Discussions
First of all, by using exactly the same spiral bevel geared
rotor system, the
proposed finite element dynamic model and the old lumped
parameter dynamic model are
compared on dynamic mesh force. Three different cases are taken
for example here. In
Case 1, pinion and gear are both overhung mounted and simply
supported, which
-
8/6/2019 Hua Xia
38/85
29
corresponds to Figure2.8. In Case 2, pinion and gear are both
overhung mounted and
flexibly supported, which corresponds to Figure2.9. In Case 3,
pinion is straddle mounted
and flexibly supported while gear is overhung mounted and
flexibly supported, which
corresponds to Figure2.10.
From the comparison results, it could be easily observed that
dynamic mesh
forces of two models are different at some modes. In Figure2.8,
dynamic responses
cannot match at Mode a and Mode b, and by observing the mode
shapes of Mode a and
Mode b of old lumped parameter model, Mode a and Mode b are both
coupled to
component 5 and 7, which are pinion bending components. In
Figure2.9, Mode a, Mode band Mode c of old lumped parameter model
fail to match finite element dynamic model.
The mode shapes of the three modes show that they are all
coupled to pinion bending,
which are represented by component 5 and 7. In Figure2.10, Mode
a of old lumped
parameter model matches very well with finite element model
while Mode b and Mode c
of old lumped parameter model show certain discrepancy with
finite element model. It
could be observed from the mode shapes that Mode a is not
coupled to pinion bending
represented by component 5&7 or to gear bending represented
by component 11&13,
Mode b is coupled to large pinion bending and Mode c is coupled
to large gear bending.
Three cases show the same phenomenon that dynamic responses of
finite element
dynamic model and old lumped parameter dynamic model may not
match well at the
modes that are coupled to pinion bending or gear bending.
-
8/6/2019 Hua Xia
39/85
30
0 500 1000 1500 2000 2500 3000 3500 400010
-1
10
0
101
102
103
10 4
105
Frequency(Hz)
M a g n
i t u
d e
( N )
Figure2.8 Dynamic mesh forces , dynamic finite element model
, old equivalent lumped parameter model
a b
a. b.
-
8/6/2019 Hua Xia
40/85
-
8/6/2019 Hua Xia
41/85
32
0 500 1000 1500 2000 2500 3000 3500 400010 -1
100
101
102
103
104
105
Frequency(Hz)
M a g n
i t u
d e
( N )
Figure2.10 Dynamic mesh forces , dynamic finite element
model
,old equivalent lumped parameter model
Figure2.11, Figure2.12 and Figure2.13 show the comparison of
finite element
model and new lumped parameter model on dynamic mesh force
separately for Case 1,
a b c
a. b. c.
-
8/6/2019 Hua Xia
42/85
33
Case 2 and Case 3. All of the three cases show that two models
have reasonably close
dynamic responses. Especially at low frequency, two models
almost show perfect match.
In the old lumped parameter model, the lumped parameter
synthesis method
simply treats total mass/inertia as lumped mass/inertia which
leads to inaccurate
representation of shaft-bearing dynamic characteristics and
leads to inaccurate modal
responses that are coupled to pinion or gear bending. In the new
lumped parameter
model, by using the effective mass/inertia instead of total
mass/inertia, the shaft-bearing
dynamic characteristics is more accurately considered and the
modal responses that are
coupled to pinion or gear first bending show better match with
finite element dynamicmodel.
However, at higher frequency range, finite element dynamic model
and new
lumped parameter dynamic model still show certain minor
discrepancies which may be
caused by the following reasons.
(a). The process to calculate effective lumped shaft-bearing
stiffness and effective
mass/inertia may not be perfect, in which minor computational
errors may exist.
(b). Since new lumped parameter synthesis approach is developed
based on the
first bending mode of pinion and gear, the new lumped parameter
model cannot
accurately predict modes that are coupled to more complicated
pinion or gear bending at
relatively high frequency range.
-
8/6/2019 Hua Xia
43/85
-
8/6/2019 Hua Xia
44/85
35
0 500 1000 1500 2000 2500 3000 3500 400010-1
100
101
102
103
104
105
Frequency(Hz)
M a g n
i t u
d e
( N )
Figure2.13 Dynamic mesh forces , dynamic finite element
model
, equivalent lumped parameter model
2.5 Conclusion
A finite element dynamic model of spiral bevel geared rotor
system is proposed in
this study, which could better account for shaft-bearing dynamic
characteristics than
existing lumped parameter model. The finite element dynamic
model is also used to
provide guide and reference for the enhancement of equivalent
lumped parameter
synthesis theory to be used in existing lumped parameter model.
Dynamic responses of
two models have been compared and show good consistency at
relatively low frequency.
Both models could be used not only to predict the dynamic
response of the spiral bevel
geared rotor system, but also to help engineers figure out the
best designs from the
viewpoint of vibration and noise.
-
8/6/2019 Hua Xia
45/85
36
Chapter 3. Effect of Shaft-bearing Configurations on Spiral
Bevel Gear
Mesh and Dynamics
3.1 Introduction
Dynamics of gear systems have been studied extensively [1-19].
It is known that
spiral bevel gear dynamics may not be accurately predicted by
ignoring the flexible
components such as shafts and bearings. In industry, different
kinds of shaft-bearing
configurations of rear axles exist. For example, pinion could be
overhung mounted with 2
bearings which is typically used in light or medium duty rear
axle, while pinion could
also be straddle mounted with 3 bearings which is typically used
in the heavy duty rear
axle. The effect of shaft-bearing configurations on spiral bevel
gear mesh and dynamics
therefore needs attention. In this study, a new shaft-bearing
model has been proposed for
the effective supporting stiffness calculation for the lumped
parameter dynamic analysis
of the spiral bevel geared rotor system with 3-bearing
straddle-mounted pinion
configuration. Also, the 3-bearing straddle mounted pinion
configuration and the 2-
bearing overhung mounted pinion configuration are compared on
dynamic
characteristics, i.e. natural frequency, dynamic mesh force and
dynamic bearing force,
and on mesh model parameters, i.e., mesh point, line-of-action
vector, mesh stiffness,
using 14-DOF lumped parameter dynamic model and quasi-static
three-dimensional
finite element tooth contact analysis program. Moreover,
parametric study of bearing
position and bearing type is performed to analyze the effect of
shaft-bearing
configuration on spiral bevel gear mesh and dynamics.
-
8/6/2019 Hua Xia
46/85
37
3.2 Mathematical Model
3.2.1 Mesh Model
Mesh model is the basis of the spiral bevel gear dynamic model.
The key step
to develop the spiral bevel gear dynamic system is to
effectively model the gear pair
meshing relationship. In this paper, a theory[15] of
synthesizing the lumped mesh
model based on the tooth load distributions generated from
quasi-static three-
dimensional finite element tooth contact analysis program[23,24]
is applied to
calculate the mesh point, line-of-action vector, mesh stiffness
and static transmission
error.
The contact zone shown in Figure3.1 is divided into N grids. For
each grid i, r i
(rix, r iy, r iz) is the position vector; n i (n ix, n iy, n iz)
is the normal vector; f i is the load.
Static mesh force could be computed as:
222
111
,,, z y xtotali N
iiz zi
N
iiy yi
N
iix x F F F F f nF f nF f nF . (1)
The line-of-action vector could be calculated as:
total z ztotal y ytotal x x F F nF F nF F n / , / , / . (2)
The mesh position could be calculated as:
x z y y x z N
ii
i
N
iiy
F xF M zF yF M x f
f r y / )(, / )(,
1
1 (3)
where, iyixixiy N
ii zixizizix
N
ii y r nr n f M r nr n f M
11
, .
The mesh stiffness could be expressed as:
0 / Ltotalm eF k (4)
-
8/6/2019 Hua Xia
47/85
38
where, e L is loaded translation transmission error and 0 is
unloaded translation
transmission error.
Figure3.1 Tooth load distribution generated from quasi-static
three-dimensional finiteelement tooth contact analysis program
3.2.2 Spiral Bevel Gear 14-DOF Lumped Parameter Dynamic
Model
The spiral bevel gear 14-DOF lumped parameter dynamic model[15]
used in
this study comprises of a spiral bevel gear pair, an engine
element and a load element
as shown in Figure3.2 Engine and load respectively have 1 DOF
which is torsional
coordinate. Pinion and gear are both modeled as rigid body which
separately have 6
DOFs. Torsional springs are used to connect pinion and engine as
well as to attach
gear and load. Pinion and gear have mesh coupling. K m is the
mesh stiffness and TE isthe static transmission error, which are
actually time-varying. Since pinion and gear
are built as rigid body, their mass and inertia are lumped at
each lumped point.
-
8/6/2019 Hua Xia
48/85
39
Lumped shaft-bearing springs are connected to each lumped point
of pinion and gear
to support pinion and gear. The equation of motion could be
expressed as:
}{}]{[}]{[}]{[ F qK qC q M . (5)
The generalized coordinates are expressed as:
T L
T g
T p E qqq },,,{}{ , (6)
T lzlylxllll z y xq },,,,,{}{ . (l = p, g) . (7)
The mass matrix and stiffness matrix are described as:
],,,,,,,,,,,,,[][ Lgzgygxggg pz py px p p p E
I I I I M M M I I I M M M I diag M ,
]][][[]][[][ tsgtspll K K DiagK DiagK
(8)
][ tspK is the coupling stiffness matrix of the torsional spring
used to connect
pinion and engine. ][ tsgK is the coupling stiffness matrix of
the torsional spring used
to connect gear and load. ][ llK is the lumped shaft-bearing
stiffness matrix of pinion
and gear calculated through shaft-bearing stiffness models which
would be described
in detail later. The damping [C] is assumed to be component
proportional.
The force vector {F} at the right side of Equation (5) is,
T Lmgm p E T F hF hT F ],,,[}{ . (9)
Here, T E and T L are torques exerted on the engine and load. F
m is the dynamic
mesh force in line-of-action direction. h pF m and hgF m are
equivalent mesh forces and
moments exerted on the pinion and the gear in generalized
coordinate directions, and
h p and hg are the coordinate transformation vectors between the
spiral bevel gear line-
-
8/6/2019 Hua Xia
49/85
40
of-action direction and generalized coordinate directions for
pinion and gear
separately. They are expressed as,
},,,,,{lzlylxlzlylxl
nnnh
, (10)
},,-{},,{ lxllyllzllxllyllzllzlylx n yn xn xn zn zn y
. (11)
Here {nlx , n ly , n lz } is the line-of-action vector; {xl , y
l , z l } is the mesh point
vector; l = p, g refers to pinion and gear local coordinate
systems seperately.
If the model is nonlinear time-varying, the dynamic transmission
error d is
solved by numerical integration in time domain and expressed
as,
T gz pygygxgggg
T pz px p p p pd R z y xh z y xh }, / ,,,,{},0,,,,{
.
(12)
Here, R is the gear ratio.
If the model is reduced to linear time-invariant, the dynamic
transmission
error d is solved in frequency domain and expressed as,
}{}{ gg p pd qhqh
. (13)
If the model is nonlinear time-varying, the dynamic mesh force F
m can be
expressed as:
cd d mcd m
cd c
cd d mcd m
m
bif cbk
bbif
bif cbk
F
000
0
000
)()(
0
)()(
. (14)
If the model is reduced to be linear time-invariant, the dynamic
mesh force is
expressed as:
)()( 00 d md mm ck F . (15)
-
8/6/2019 Hua Xia
50/85
41
Here, K m is mesh stiffness; C m is mesh damping; 0 is unloaded
transmission
error; bc represents gear backlash.
Figure3.2 Spiral bevel gear 14 DOF lumped parameter dynamic
model
3.2.3 Finite Element Modeling of 3-bearing Straddle Mounted
Pinion Configuration
for the Effective Lumped Stiffness Calculation
As shown in Figure3.3, static finite element model of 3-bearing
straddle
mounted pinion configuration is developed based on static finite
element model of 2-
bearing overhung mounted pinion configuration[19] to calcul ate
the pinions
equivalent shaft-bearing stiffness relative to the lumped point.
The pinion with
-
8/6/2019 Hua Xia
51/85
42
integrated shaft is modeled with several uniform cross-section
beam elements.
Bearing is modeled as stiffness matrix calculated according to
the bearing stiffness
formulation[21,22]. The model totally consists of 9 nodes, 5
uniform cross-section
beam elements, and 3 bearing elements.
Add a unit load at the lumped point in one direction and then
the equation for
this static finite element model could be expressed as:
}{}{}{ S RP (16)
Here ,{P} represents the external load exerted at all the nodes;
{R} represents
the reaction load at all the nodes; [ S] is the assembled
stiffness matrix; { }
represents the displacements of all the nodes.
A more detailed equation could be drawn from (16) as:
S
F
SSSF
FSFF
S
F
S
F
SS
SS
R
R
P
P(17)
Here, P F means the external load exerted at the nodes at the
part of pinion with
integrated shaft. P S means the external load at the nodes at
the bearing outer races. RF
represents the reaction load at the nodes at the part of pinion
with integrated shaft. RS
represents the reaction load at the nodes at the bearing outer
races. F represents the
displacement of the nodes at the part of pinion with integrated
shaft. S represents
the displacement of the nodes at the bearing outer races.
Since the reaction load is only exerted at the nodes at the
bearing outer races
and nodes at the bearing outer races are rigidly fixed, RF and S
in equation (17)
could be set to be zeros,
-
8/6/2019 Hua Xia
52/85
43
0
0 F
SSSF
FSFF
SS
F
SS
SS
RP
P(18)
Thus, (19) could be drawn from (18) as:
F FF F PS 1 (19)
The lumped point displacement { l1 } could be got from {F }.
The
relationship among the unit external load at the lumped point {
lP1 }, the displacement
of the lumped point{ l1 } and the equivalent shaft-bearing
stiffness relative to the
lumped point ][ llK could be expressed as:
}{}{ 11 llll K P . (20)
Following above procedure, by adding a unit load in other five
directions
separately to the lumped point, the lumped point displacements
corresponding to each
unit load could be calculated and obtained, which is written as
)6,5,4,3,2(}{ ili .
The unit load at the lumped point in each of other 5 directions
could be written as
)6,5,4,3,2(iP li . Similarly, the following formulation could be
obtained as:
)6,5,4,3,2(}{}{ iK P lillli (21)
Combining (20) and (21),
]][[][ 654321654321llllllllllllll K PPPPPP (22)
So, the equivalent shaft-bearing stiffness relative to the
lumped point ][ llK
could be calculated as:
1654321654321 ]][[][llllllllllllll PPPPPPK . (23)
-
8/6/2019 Hua Xia
53/85
44
Figure3.3 Static finite element modeling of 3-bearing straddle
mounted pinionconfiguration
3.2.4 Axial Translational Stiffness Model Refinement
The equivalent shaft-bearing stiffness calculated from static
finite element
model ][ llK may not accurately describe the equivalent axial
translational stiffness.
So the axial translational stiffness model of 3-bearing straddle
mounted pinion
configuration shown in Figure3.4 is developed based on the axial
translational
stiffness model of 2-bearing overhung mounted pinion
configuration[19] in order to
correct the axial translational stiffness described by
equivalent shaft-bearing stiffness
calculated from static finite element model ][ llK . In
Figure3.4, K b1 and K b2 are axial
translational stiffness of bearing1 and bearing2. K s1 is shaft
axial stiffness from load
point to center of bearing1. K s2 is shaft axial stiffness from
center of bearing1 to
-
8/6/2019 Hua Xia
54/85
45
center of bearing2. K c is additional cascade stiffness with
bearing2 to represent the
shaft-bolt-york between the center of bearing2 and inner race of
bearing2. K hb is
housing bolt stiffness.
Figure3.4 Axial translational stiffness model
The axial translation stiffness of ][ llK calculated from FE
model does not
include K s3 and K h. The refinement should be made according to
Figure3.4 in the
following way. Before doing finite element calculation, the
cascade stiffness K c
-
8/6/2019 Hua Xia
55/85
-
8/6/2019 Hua Xia
56/85
47
supporting gear. A bearing stiffness formulation[21,22] is
applied here to calculate
stiffness of these bearings. As for pinion, D refers to
Bearing#1 to pinion back side
distance. L refers to Bearing#1 to Bearing#2 distance. S refers
to Bearing#0 to pinion
back side distance and this is only applicable to 3-bearing
mounted pinion. As for gear, D
refers to Bearing#3 to ring gear back side distance. L refers to
Bearing#3 to Bearing#4
distance.
Table 1. System Parameters
Gear ParametersPinion Gear
Number of teeth 14 45Offset (m) 0 0Pitch angle (rad) 0.391
1.282Pitch radius (m) 0.067 0.215Spiral angle (rad) 0.478 0.478Face
width (m) 0.063 0.063Type Left Hand Right HandLoaded side Concave
Convex
Shaft Parameters3-brg Pinion Shaft 2-brg Pinion Shaft Gear
Shaft
Outer diameter(m) 0.09 0.09 0.12Inner diameter(m) 0 0 0D(m)
0.028 0.028 0.026L(m) 0.115 0.15 0.055S(m) 0.1Backcone thickness(m)
0.01 0.01 0.048Youngs modulus 2.07e11 2.07e11 2.07e11 Poissons
ratio 0.3 0.3 0.3
Bearing Parameters
Bearing#0 Bearing#1 Bearing#2Kxx (N/m) 8.599e9 8.823e9
8.599e9Kxy (N/m) 0 1.095e2 -1.671e2Kxz (N/m) 4.236 1.277e1 4.236Kxx
(N/rad) 4.101e -1 2.457e-1 4.101e-1Kxz (N/rad) -1.521e8 1.452e8
-1.521e8Kyy (N/m) 0 8.887e8 1.721e9Kyz (N/m) 0 -2.138e1 1.73e1
-
8/6/2019 Hua Xia
57/85
-
8/6/2019 Hua Xia
58/85
49
Figure3.5 3-bearing straddle mounted pinion (upper) and
2-bearing overhung mounted pinion (lower)
3.3.1 Analysis on Equivalent Shaft-bearing Stiffness Models and
P inions Lumped
Shaft-bearing Stiffness Matrices of Two Pinion
Configurations
Static finite element models of 2-bearing mounted pinion and
3-bearing
mounted pinion are shown in Figure3.6. The pinion with
integrated shaft is modeled
with several uniform cross-section beam elements and the
bearings are modeled with
linear springs. The finite element model of 3-bearing mounted
pinion consists of 9
nodes, 5 uniform cross-section beam elements and 3 linear spring
elements. The finite
element model of 2-bearing mounted pinion consists of 7 nodes, 4
uniform cross-
section beam elements and 2 linear spring elements. The axial
translation stiffness
-
8/6/2019 Hua Xia
59/85
50
models for two kinds of configurations are identical as
Figure3.4, since the pilot
bearing of 3-bearing configuration cannot stand the axial
load.
It could be predicted that the lumped shaft-bearing stiffness of
two
configurations will be different. As for the 2-bearing mounted
pinion, the equivalent
lumped shaft-bearing stiffness could be derived as:
078432038100637509802081404
038100078432081404003163750
6375008140409644889154689
9802003189150901318788
0814046375046898788096448
][
E ...-.- E .-
. E . E ..-.
.- E . E ..-.
.-.-.- E ..
E .-... E .
k k k k k
k k k k k
k k k k k
k k k k k
k k k k k
K
ll z z
ll x z
ll zz
ll zy
ll zx
ll z x
ll x x
ll xz
ll xy
ll xx
ll z z
ll x z
ll zz
ll zy
ll zx
ll z y
ll x y
ll yz
ll yy
ll yx
ll z x
ll x x
ll xz
ll xy
ll xx
ll
.
As for the 3-bearing mounted pinion, the equivalent lumped
shaft-bearing
stiffness could be derived as:
-
8/6/2019 Hua Xia
60/85
51
07140.502771052040441207294.7
02771.007140.507294.78690.05204.0
5204007294.710585.153.1493.12
44128690.0531409015190.84
07294.75204093.1290.8410585.1
][
E ..-.- E -
E E -
.- E E -
.--.- E .
E -. E
k k k k k
k k k k k
k k k k k
k k k k k
k k k k k
K
ll z z
ll x z
ll zz
ll zy
ll zx
ll z x
ll x x
ll xz
ll xy
ll xx
ll z zll x zll zzll zyll zx
ll z y
ll x y
ll yz
ll yy
ll yx
ll z x
ll x x
ll xz
ll xy
ll xx
ll
Certain stiffness elements change significantly from 2-bearing
to 3-bearing
configuration. They arell
xxk ,ll
zzk ,ll
x xk ,ll
z zk ,ll
x zk andll
z xk .ll
xxk ,ll
zzk are horizontal
and vertical translational stiffness, which becomes larger. ll x
xk ,ll
z zk are both bending
stiffness, which also becomes larger. ll z xk ,ll
x zk are both representing the coupling
between translation and bending, which becomes smaller. The
significant change of
these stiffness elements may lead to the change of modal
frequency and dynamic
response.
-
8/6/2019 Hua Xia
61/85
52
Figure3.6 Finite element model of 3-bearing mounted pinion
(left) and finite element model of 2-bearing mounted pinion
(right)
3.3.2 Comparison on Gear Dynamics
Here, two configurations are compared from the viewpoint of the
dynamics of
spiral bevel geared rotor system, by using the 14-dof lumped
parameter dynamic
model and it is assumed that the dynamic system parameter
affected by
2-bearing and 3- bearing configurations only lies in pinions
lumped shaft -bearing
stiffness.
As shown in Figure3.7, the dynamic mesh forces of 2-bearing case
and 3-
bearing case show obvious difference, including certain main
peak. For example, by
changing 2-bearing configuration to 3-bearing configuration, the
peak at about 800
Hz is shifted to the left and the peak amplitude is increased.
Thus, it could be
concluded that effect of 2-bearing configuration and 3-bearing
configuration on
dynamic mesh force could be significant.
-
8/6/2019 Hua Xia
62/85
53
500 1000 1500 2000 250010
2
103
104
freqenceny(Hz)
D y n a m
i c M e s
h F o r c e
( N )
Figure3.7 Comparison of 2-bearing and 3-bearing configurations
on dynamic mesh force
, 2-bearing case; ,3-bearing case
Figure3.8 shows the comparison on system modes. As for
2-bearing
configuration case, at low frequency range, there are many
pinion bending modes
which have large pinion bending strain energy, such as Mode 6,
Mode 7, Mode 8 and
Mode 9. While at high frequency range, there are few pinion
bending modes. By
contrast, as for 3-bearing configuration case, at low frequency
range, there are few
pinion bending modes, while at high frequency range, there exist
pinion bending
modes which are dominated by pinion bending strain energy. Thus,
the effect of 2-
bearing and 3-bearing configurations on dynamic system modes is
significant and
pinion bending modes are at lower frequency for 2-bearing
configuration case. This
phenomenon may be caused by the increased lumped shaft-bearing
bending stiffness
from 2-bearing configuration to 3-bearing configuration.
-
8/6/2019 Hua Xia
63/85
54
Figure3.8 Comparison of 2-bearing and 3-bearing configurations
on modal strain energydistribution
(a) Description of x-axis in (b) and (c); (b) 2-bearing
configuration case; (c) 3-bearingconfiguration case
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 1(0.0 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 2(16.3 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 3(47.3 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 4(421.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 5(430.3 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 6(673.8 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 7(793.9 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 8(1252.9 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 9(1739.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 10(1754.8 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 11(1920.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 12(1975.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 13(4062.8 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 14(4139.6 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 1(0.0 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 2(16.3 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 3(47.3 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 4(420.4 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 5(430.3 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 6(583.8 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 7(620.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 8(678.5 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 9(830.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 10(1273.4 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 11(1920.2 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 12(1970.7 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 13(3145.5 Hz)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
Mode 14(3246.8 Hz)
(a)
(b)
(c)
-
8/6/2019 Hua Xia
64/85
-
8/6/2019 Hua Xia
65/85
56
0 1000 2000 30000
100
200
300
400
freqenceny(Hz)
M a g n
i t u
d e ( N m
)
0 1000 2000 3000
0
10
20
30
40
50
60
freqenceny(Hz)
M a g n
i t u
d e ( N m
)
Figure3.9 Comparison of 2-bearing and 3-bearing configurations
on dynamic bearing
load (a) Bearing1:Dynamic bearing moment around z-axis; (b)
Bearing2: Dynamic bearing
moment around x-axis; , 2-bearing case; ,3-bearing case
As shown in Figure3.10, generally, pinion response in 2-bearing
configuration
case is larger than pinion response in 3-bearing configuration
case, especially in low
frequency range. And the change of pinion response matches the
change of system
modes. This is because, by changing 2-bearing configuration to
3-bearing
configuration, horizontal, vertical translation and bending
stiffness increase
significantly and pinions translational and bending motion is
large ly restrained.
Therefore, pinions vibration could be significantly reduced
through changing 2 -
bearing configuration pinion to 3-bearing configuration
pinion.
(a) (b)
-
8/6/2019 Hua Xia
66/85
57
0 1000 2000 30000
2
4
6x 10
-6
freqenceny(Hz)
M a g n i t u
d e
( m )
0 1000 2000 3000
0
2
4
6x 10
-6
freqenceny(Hz)
M a g n
i t u d e ( m
)
0 1000 2000 30000
0.5
1
x 10-4
freqenceny(Hz)
M a g n
i t u
d e ( r a
d )
0 1000 2000 3000
0
0.5
1
x 10-4
freqenceny(Hz)
M a g n
i t u
d e ( r a
d )
Figure3.10 Comparison of 2-bearing and 3-bearing configurations
on pinion response(a) Horizontal x-axis translation displacement;
(b) Vertical z-axis translation
displacement; (c)Rotation displacement around x-axis; (d)
Rotation displacement
around z-axis , 2-bearing case; ,3-bearing case
3.3.3 Effect of 2-bearing and 3-bearing Configurations on Mesh
Model
The difference of shaft-bearing compliance between two kinds
of
configurations may lead to the difference of mesh model. By
using Quasi-static
Three-dimensional Finite Element Tooth Contact Analysis Program,
the effect of
shaft-bearing configurations on mesh model, i.e. mesh point,
line-of-action, mesh
stiffness, is studied here.
From Figure3.11, it could be concluded that for 3-bearing
configuration case,
the effect of pilot bearing position on mesh point is very
slight.
(a) (b)
(c) (d)
-
8/6/2019 Hua Xia
67/85
58
0 10 20 30-0.064
-0.062
-0.06
-0.058
-0.056
-0.054
-0.052
RollAngle in One Mesh Cycle(Degree)
M e s h
P o
i n t X C o o r d
i n a
t e ( m )
0 10 20 300.174
0.176
0.178
0.18
0.182
0.184
0.186
RollAngle in One Mesh Cycle(Degree)
M e s h
P o
i n t Y C o o r d
i n a
t e ( m )
0 10 20 30-0.012
-0.01
-0.008
-0.006
-0.004
-0.002
0
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t Z C o o r d i n a
t e ( m )
Figure3.11 Effect of pilot bearing position on mesh point for
3-bearing case , S =0.002 inch; , S =1.18 inch. , S =2.36 inch.
, S =3.36 inch; , S =4.36 inch; , S =5.36 inch;
From Figure3.12 and Figure3.13, it could be concluded that both
for 3-bearing
configuration case and 2-bearing configuration case, the effect
of tapered roller
bearing position on mesh point is very slight.
-
8/6/2019 Hua Xia
68/85
59
0 10 20 30-0.064
-0.062
-0.06
-0.058
-0.056
-0.054
-0.052
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t X C
o o r d
i n a
t e ( m )
0 10 20 300.174
0.176
0.178
0.18
0.182
0.184
0.186
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t Y C o o r d
i n a t e ( m
)
0 10 20 30-0.012
-0.01
-0.008
-0.006
-0.004
-0.002
0
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t Z C o o r
d i n a
t e ( m )
Figure3.12 Effect of tapered roller bearing position on mesh
point for 3-bearing case
, L =5.965 inch; , L =4.445 inch. , L =2.925 inch.
0 10 20 30-0.064
-0.062
-0.06
-0.058
-0.056
-0.054
-0.052
RollAngle in One Mesh Cycle(Degree) M
e s h P o
i n t X C o o r d
i n a
t e ( m )
0 10 20 300.174
0.176
0.178
0.18
0.182
0.184
0.186
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t Y C o o r d
i n a t e
( m )
-
8/6/2019 Hua Xia
69/85
60
0 10 20 30-0.012
-0.01
-0.008
-0.006
-0.004
-0.002
0
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t Z
C o o r d
i n a t e
( m )
Figure3.13 Effect of tapered roller bearing position on mesh
point for 2-bearing case
, L =5.965 inch; , L =4.445 inch. , L =2.925 inch.
Comparison of 2-bearing and 3-bearing configurations on mesh
point in
Figure3.14 shows that there exists certain small influence of
2-bearing and 3-bearing
configurations on mesh point. In other words, by changing
2-bearing configuration to
3-bearing configuration, the mesh point is influenced a little
and obviously this
influence comes from adding a pilot bearing to the rear end of
pinion rather than
changing the distance between the tapered roller bearings.
0 10 20 30-0.064
-0.062
-0.06
-0.058
-0.056
-0.054
-0.052
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t X C o o r d
i n a
t e ( m )
0 10 20 300.174
0.176
0.178
0.18
0.182
0.184
0.186
RollAngle in One Mesh Cycle(Degree)
M e s
h P o
i n t Y C o o r d
i n a
t e ( m )
-
8/6/2019 Hua Xia
70/85
61
0 10 20 30-0.012
-0.01
-0.008
-0.006
-0.004
-0.002
0
RollAngle in One Mesh Cycle(Degree)
M e s h
P o
i n t Z C o o r d
i n a
t e ( m )
Figure3.14 Comparison of 2-bearing and 3-bearing configurations
on mesh point , 2-bearing configuration case; ,3-bearing
configuration case.
Figure3.15 shows that, as for 3-bearing configuration case,
there is little effect
of pilot bearing position on line-of-action vector.
0 10 20 300.2
0.22
0.24
0.26
0.28
RollAngle in One Mesh Cycle(Degree) L i n e - o
f - a c t
i o n
X D i r e c
t i o n a
l C o s
i n e
0 10 20 300.5
0.52
0.54
0.56
0.58
RollAngle in One Mesh Cycle(Degree) L i n e - o
f - a c
t i o n
Y d i r e c
t i o n a
l c o s
i n e
-
8/6/2019 Hua Xia
71/85
62
0 10 20 300.76
0.78
0.8
0.82
0.84
RollAngle in One Mesh Cycle(Degree) L i n e - o
f - a c
t i o n
Z d i r e c t
i o n a
l c o s i n e
Figure3.15 Effect of pilot bearing position on line-of-action
vector for 3-bearing case , S =0.002 inch; , S =1.18 inch., S =2.36
inch.
, S =3.36 inch; , S =4.36 inch; , S =5.36 inch;
It could be concluded from Figure3.16 and Figure3.17 that, both
for 3-bearing
configuration case and 2-bearing configuration case, the effect
of tapered roller
bearing position on line-of-action vector is very tiny.
0 10 20 300.2
0.22
0.24
0.26
0.28
RollAngle in One Mesh Cycle(Degree ) L i n e - o
f - a c
t i o n
X D i r e c
t i o n a l
C o s
i n e
0 10 20 30
0.5
0.52
0.54
0.56
0.58
RollAngle in One Mesh Cycle(Degree) L i n e - o
f - a c t
i o n
Y D i r e c
t i o n

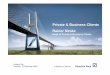




![Linux XIA: An Interoperable Meta Network Architecture to ...XIA, a native implementation of XIA [12] in the Linux ker-nel, as a candidate. We first describe Linux XIA in terms of](https://img.pdfslide.us/doc/110x75/5ee11665ad6a402d666c1866/linux-xia-an-interoperable-meta-network-architecture-to-xia-a-native-implementation.jpg)