Embed Size (px)
Citation preview

How to simulate in Simulink: DAE, DAE-EKF,MPC & MHE
Tamal Das
PhD CandidateIKP, NTNU
24th May 2017

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Outline
1 Differential algebraic equations (DAE)
2 Extended Kalman filter (EKF) for DAE
3 Moving horizon estimation (MHE)
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 1 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Differential algebraic equations (DAE)
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 2 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Types of DAEs: Fully implicit and Semi-explicit
Notation
x : Differential variables
z : Algebraic variables
y =[xT zT
]
Fully implicit DAE
F
(y ,
dy
dt
)= 0
y (0) = y0
Semi-explicit DAE
dx
dt= f (x , z)
0 = g (x , z)
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 3 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAEs in Chemical Engineering
In ChemEng, mathematical models consist of the following:
Dynamic conservation laws [Differential equations]
Mass balanceEnergy balance
Static conservation laws [Algebraic equations]
Constitutive equations [Algebraic equations]
Equation of statePressure drop equationHeat transfer equation
Physical and operating constraints [Algebraic equations]
Desired operationDesign constraints
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 4 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Index of a DAE
In ChemEng, commonly encountered DAEs are semi-explicit
dx
dt= f (x , z) ; 0 = g (x , z)
Index of DAEs determines how hard it is to solve them
Index 1-DAE∂g∂z is non-singular
det(
∂g∂z
)6= 0
∂g∂z is full rank matrix
Higher index (2,3,. . . -) DAEs
∂g∂z is singular
det(
∂g∂z
)= 0
∂g∂z is not full rank matrix
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 5 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Examples of DAE indices
Differential variable (x) : c
Algebraic variable (z) : c0
CSTR with volume VResidence time
τ = VF
F, c0
F, c
dcdt = (c0−c)
τ
Index 1-DAE
c0 = γ (t) is specified;∴ g = c0 − γ (t)∂g∂z = ∂g
∂c0= 1 (Full rank)
Higher index (2,3,. . . -) DAEs
c = γ (t) is specified;∴ g = c − γ (t)∂g∂z = ∂g
∂c0= 0 (not full rank)
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 6 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
How to determine DAE index?
Index = Number of differentiations of g (x , z) w.r.t time necessaryto get a differential equation for each algebraic variable
Index 1-DAE
c0 = γ (t) is specified
Derivative 1: dc0dt = γ′ (t)
Index = 1
Higher index (2,3,. . . -) DAEs
c = γ (t) is specified
Derivative 1: dcdt = γ′ (t)
Rearrange: c0−cτ = γ′ (t)
Derivative 2: dc0dt −
dcdt = τγ′′
Rearrange: dc0dt = γ′ + τγ′′
Index = 2
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 7 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Why is Index of a DAE important?
Index 1-DAEs are easy whereas higher index-DAEs are hard
Higher index DAEs are hard due to initialization of variables(among others)
In ChemEng, DAEs of both kinds are encountered
dx
dt= f (x , z) ; 0 = g (x , z)
det
(∂g
∂z
)6= 0 (Index 1-DAE), or
det
(∂g
∂z
)= 0 (Higher index DAE)
Where does one encounter higher index DAEs in ChemEng
Making simplifications in process modelsConverting simulation problems into control problems
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 8 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Initialization issues of DAEs
Index 1-DAE (Easy)
Initialize differentialvariables x (0)
Solve g (x (0) , z (0)) = 0 foralgebraic variables z (0)
Higher index DAEs (Hard)
x (0) and z (0) areinterdependent
x (0) and z (0) cannot bespecified independently
If specified independently,leads to inconsistent initialconditions
DAE solver will crash
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 9 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAE example: Two component dynamic flash calculation
F, z1, z2
V, y1, y2
L, x1, x2
ML
MV
P, TPout
Volume V
MT = F − V − L
M1 = Fz1 − Vy1 − Lx1
M2 = Fz2 − Vy2 − Lx2
MT = ML + MV
M1 = MLx1 + MV y1
M2 = MLx2 + MV y2
x1 + x2 = y1 + y2
7C
onse
rvat
ion
equ
atio
ns
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 10 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAE example: Two component dynamic flash calculation
F, z1, z2
V, y1, y2
L, x1, x2
ML
MV
P, TPout
Volume V
y1 = K1x1
y2 = K2x2
K1 = f K1 (T ,P)
K2 = f K2 (T ,P)
ρL = f L (x1)
ρV = f V (T ,P)
L = hL (ML, ρL)
V = hV (P − Pout)
8C
onst
itu
tive
equ
atio
ns
V =ML
ρL+
MV
ρV
}Design
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 11 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAE example: Two component dynamic flash calculation
F, z1, z2
V, y1, y2
L, x1, x2
ML
MV
P, TPout
Volume V
3 differential equations
3 differential variables
13 algebraic equations
13 algebraic variables
We can find an output setfor all the algebraic anddifferential variables
Index 1
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 12 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAE example: Modified two component dynamic flash
F, z1, z2
V, y1, y2
L, x1, x2
ML
P, T
ML = F − V − L
M1 = Fz1 − Vy1 − Lx1
M2 = Fz2 − Vy2 − Lx2
M1 = MLx1
M2 = MLx2
x1 + x2 = y1 + y2
6C
onse
rvat
ion
equ
atio
ns
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 13 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAE example: Modified two component dynamic flash
F, z1, z2
V, y1, y2
L, x1, x2
ML
P, T
y1 = K1x1
y2 = K2x2
K1 = f K1 (T ,P)
K2 = f K2 (T ,P)
L = hL (ML, ρL)
ρL = f L (x1)
6C
onst
itu
tive
equ
atio
ns
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 14 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
DAE example: Modified two component dynamic flash
F, z1, z2
V, y1, y2
L, x1, x2
ML
P, T 3 differential equations
3 differential variables
9 algebraic equations
9 algebraic variables
We cannot find an outputset for algebraic variable V .
We need to differentiatetwice to get there
Index 2
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 15 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Solving higher index DAE problems
Reduce index to 1 or 0
Find consistent initial conditions for all the variables of thenew system
Solve the new system as a Index 1 DAE system or 0 indexsystem (ODE system)
The procedure1 is explained on the MATLAB website withadded support functions:
Index / order reduction (’reduceDAEIndex’)Finding consistent initial guesses (’decic’)DAE solvers: ode15i, ode15s, or ode23t
1https://se.mathworks.com/help/symbolic/solve-differential-algebraic-equations.html
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 16 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Solving index 1-DAE: Robertson DAE in Simulink
A −−⇀↽−− B + C
B → C
dCA
dt= −0.04CA + 104CBCC
dCB
dt= 0.04CA − 104CBCC − 3× 107C 2
B
0 = 1− (CA + CB + CC )
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 17 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Solving index 1-DAE problem in Simulink: Implementation
InterpretedMATLABFcn
derivatives
1s
Integrator
f(z)z Solvef(z)=0
AlgebraicConstraint
InterpretedMATLABFcn
Algebraics
Algebraicstates
Differentialstates
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 18 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
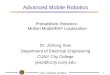
Solving index 1-DAE problem in Simulink: Result
10-6
10-4
10-2
100
102
104
106
t (sec)
0
0.2
0.4
0.6
0.8
1
Co
ncen
trati
on
[-]
Robertson DAE problem with a Conservation Law, solved by ODE15S
CA
CC
CB
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 19 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Extended Kalman filter (EKF) for DAE
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 20 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Continuous-discrete EKF algorithm for DAEdx
dt= f (x , z) + w
0 = g (x , z) ; y = h (x , z) + vxaug =
[xz
]; f aug =
[fg
]
dx
dt= f (x) ; L =
[I
−(∂g∂z
)−1 (∂g∂x
)]dP
dt=
(∂f aug
∂xaug
)P + P
(∂f aug
∂xaug
)T
+ LQLT
Kk = P−k
(∂h
∂xaug
)T(Rk +
(∂h
∂xaug
)P−k
(∂h
∂xaug
)T)−1
xaug ,+k = xaug ,−k + Kk
(yk − hk
(xaug ,−k
))P+k =
(I − Kk
(∂h
∂xaug
))P−k
(I − Kk
(∂h
∂xaug
))T
+ KkRkKTk
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 21 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Moving horizon estimation (MHE)
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 22 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
MHE is a dynamic optimization problem
At each sample time, a set of past few measurements are usedto provide a state estimate
This problem is discretized to a nonlinear program (NLP) [fornonlinear estimation]
NLP is solved using IPOPT solver in CasADi
CasADi is interfaced with Simulink using system block toprovide online state estimation
Tamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 23 / 24

Differential algebraic equations (DAE) Extended Kalman filter (EKF) for DAE Moving horizon estimation (MHE)
Conclusions
DAE systems are hard: particularly higher index DAEs
Two approaches:
simultaneous (Mass matrix solver)sequential (Simulink with Algebraic constraint block)
Estimation for DAE systems: CD-DAE-EKF in Simulink
MPC in Simulink using system block and CasADi
MHE in Simulink using system block and CasADi
For simulation files and this presentation, follow2
Thank you for your attention
2folk.ntnu.no/tamaldTamal Das How to simulate in Simulink: DAE, DAE-EKF, MPC & MHE 24 / 24