Embed Size (px)
Citation preview

How should trends in hydrological extremes be estimated?
Robin T Clarke
Instituto de Pesquisas Hidraulicas
Universidade Federal do Rio Grande do Sul (UFRGS)
Porto Alegre – RS
Brazil
Keywords: Trend estimation; hydrological extremes; extreme value distributions; Theil-
Sen.
This article has been accepted for publication and undergone full peer review but has not beenthrough the copyediting, typesetting, pagination and proofreading process which may lead todifferences between this version and the Version of Record. Please cite this article as an‘Accepted Article’, doi: 10.1002/wrcr.20485

2
Summary.
A comparison of six procedures for estimating the linear trend parameter β in
annual maximum one-day river flows at five sites in southern Brazil showed marked
differences between, on the one hand, estimates obtained by incorporating trend into the
GEV location parameter with all parameters estimated by maximum likelihood (ML); and
on the other hand, estimates found by least squares, trend-removal prior to fitting the
GEV by ML, boot-strap sampling, and Theil-Sen estimation. ML estimates of trend were
considerably smaller than those given by all other procedures. The same was true where
trend had been incorporated into the Gumbel location parameter. Where 95% confidence
intervals were calculated for the “true” trend β by different procedures, some confidence
intervals bracketed zero (indicating that the trend was not “significant” at the 5% level)
but there was no consistency between results from different procedures; Theil-Sen
confidence intervals always bracketed zero, confidence intervals given by de-trending
never did. It is concluded that not only do different estimation procedures give different
measures of trend uncertainty, as reported elsewhere, but the estimated trends themselves
may differ, and the paper suggests an explanation why this may occur. Some
philosophical issues relating to estimation of trend in climatological and hydrological
extremes are discussed, and it is concluded that selection of a method to estimate trend
must depend on context.

3
Introduction.
Recent decades have seen a surge in analyses of hydrological and climatological
data to seek evidence of trends brought about by anthropogenic influences. In terms of
trends in river flows, the international literature reports many recent studies of trends in
annual and seasonal flows [e.g., Hannaford and Buys, 2012; Burn et al., 2010; Wilson et
al., 2010; Fiala et al., 2010; Novotny and Stefan, 2007, Hodgkins and Dudley, 2006]
some of which have included analyses of trends in high flows [Marsh and Harvey 2012;
MacDonald, 2012; Petrow and Merz, 2009; Hannaford and Marsh, 2008; Svensson et
al., 2006; Robson et al., 1998]. The present paper addresses some issues relating to the
analysis of trends in high flows, in a region where land-use change from native forest to
arable cropping is likely to be at least as influential on extreme river flows as any existing
or potential climate change over the last eighty years. In particular, the paper is concerned
with the apparently simple issue of how to estimate trends in annual maximum one-day
river flows, although the methods discussed also have relevance to the estimation of
trends in annual maximum rainfalls of any given duration, and trends in annual maxima
of climatological variables.
There is a very extensive literature on the use of Extreme Value (EV) distributions
for describing the variability amongst “block maxima” (such as the series obtained by
abstracting maximum values during periods or blocks – typically years) with the
Generalized Extreme Value (GEV) distribution given by

4
G (q) = exp{- [ 1 + ξ ( q – μ ) / σ ] -1/ξ } 1 + ξ ( q – μ ) / σ > 0; σ > 0 (1)
where μ, σ, ξ are parameters of location, scale and shape respectively; q denotes the
annual maximum one-day flow. The methods of Hosking and Wallis [1997] based on
estimation of the GEV parameters (μ, σ, ξ) by L-moments have proved simple to use, and
software is also widely available for fitting GEV distributions by maximum likelihood
(ML). Coles [2001, Chapter 6] has described how, in the presence of trend in the series of
block maxima, the GEV distribution can be adapted to estimate trends in any of the
parameters, typically and most commonly by fitting the modified distribution GEV
(μ (t), σ, ξ) where μ (t) = α + β t ; extensions to GEV (μ (t), σ (t), ξ(t)) are also possible.
In all such approaches, it is assumed that annual maxima are statistically independent.
This paper considers only the simpler model GEV (α + β t , σ, ξ), with particular
emphasis on the estimation of β, and on the uncertainty in this estimate as measured by
its 95% confidence interval. The linear trend parameter β is estimated by ML using the
statistical package GenStat [VSN International, 2012]; other packages (e.g., ismev,
http://www.ral.ucar.edu/~ericg/softextreme.php, Heffernan and Stephenson, 2013, and
related packages evd, evdbayes, lmom, POT) allow more general GEV models to be fitted
with link functions relating parameters to predictors [Coles, 2001, Section 6.1] , which
may include other predictors as well as time. Also, since the GEV distribution reduces to
the widely-used Gumbel distribution when the GEV shape parameter ξ is zero, the paper
includes this too, using a form in which the Gumbel parameter μ is μ (t) = α + β t.

5
A GEV distribution with time-variant location parameter is not the only way to
estimate trend parameters when annual maxima are statistically independent. The many
alternatives include bootstrap estimation [e.g., Venables and Ripley, 1999], Theil-Sen
distribution-free estimation [e.g., Hannaford and Buys, 2012], two methods that are used
in this paper. Ordinary least squares also provides a valid estimate of the trend parameter
β, but the fact that extreme flows are commonly heteroscedastic, with larger extremes
having greater variances, means that confidence limits for β calculated on the
assumption that the residual variance σe2 is constant will no longer be valid. Another
estimate of β explored in this paper is given by using least squares to estimate the trend
coefficient β, then calculating the residuals {ε t} to which a GEV (or Gumbel) is fitted,
the location parameter then being no longer time-dependent. An advantage of such a
procedure is that ML estimation requires a search over the three-dimensional (μ, σ, ξ)
space instead of the four-dimensional (μ, σ, ξ, β): a considerable advantage if many
sequences are to be analysed for trend Other methods of trend estimation (M-estimators;
least median of squares (LMS); least trimmed squares (LTS); S-estimation; MM-
estimation) might have been included, but most have drawbacks [Venables and Ripley,
1999], and in any case, are not widely used by hydrologists and climatologists. Nor does
the paper include the estimation of trends in “peaks-over-threshold” (PoT) models, which
can also be modelled, in very general forms, by the ismev software referred to above.
Thus the purpose of the paper is to compare estimates ^
β of the trend coefficient
β obtained from a number of possible estimation procedures, and to compare their
uncertainties as measured by these estimates’ approximate confidence intervals. The

6
following sections describe the data used, the analytical procedures by which they were
analysed, and the results. A discussion follows, and conclusions are stated.
Data.
The primary data source was measurements of daily mean flow over the period
1940 to 2010 at five gauging stations in the southernmost Brazilian state of Rio Grande
do Sul, a region where clearance of native forest and land-use change to agriculture has
been extensive over the period of record. For one site, 14 de Julho, the record was even
longer: 1931 to 2010, but with the two years 2004 and 2005 missing. The five sites were
used because they are the longest in the region, and because they are almost complete.
Table 1 give details of location, upstream drainage area, and mean annual rainfall for the
five sites. From the records of daily mean flow, the maximum daily flow in each year of
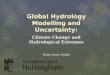
record was abstracted. Figure 1 shows a plot of the five sequences of annual maximum
flows for the period 1940-2010, standardized by subtracting each sequence mean and
dividing by each sequence’s standard deviation, so that the vertical axis is dimensionless.
Visual inspection suggests a slight positive trend in annual maxima over the period at
some sites, as well as substantial cross-correlation between sites. When each record is
divided into four roughly equal periods, a Bartlett test shows evidence of variance
heterogeneity at four of the five sites (χ2 values 9.32, 8.85, 8.08, 13.32, 6.60; P-values
0.025, 0.031, 0.044, 0.004, 0.086, all with three degrees of freedom); but where variances
differ significantly, they do not show an increasing trend with time. Variance
heterogeneity was also found where data were divided into four groups by magnitude, as

7
well as by time. Modelling the variance of annual maxima, and of cross-correlation, are
not discussed further in this paper, which focuses on the estimation of linear trend in the
measured variable.
Analytical method.
The analysis is to compare estimates of trend, and the uncertainties in those estimates (as
measured by 95% confidence intervals), when different analytical procedures were used
for trend estimation. Because the flow sequences at the five gauge sites are annual
maxima, it is appropriate to assume that serial correlation is absent, and this was
quantified by calculating the correlogram and a portmanteau test for each sequence [Box
et al., 2009]. For the site 14 de Julho, Figure 2 gives a Q-Q plot comparing sequence
quantiles with quantiles of a standard GEV distribution. Figures for the other four sites
are similar, and are not shown. In all cases, quantiles of the flow sequence lay
comfortably within the 95% confidence interval for the Q-Q plot, suggesting that a GEV
distribution, possibly with super-imposed linear trend, should be an adequate description
of the statistical characteristics of annual maximum flows. ML procedures [Coles, 2001,
Chapter 6] were used to estimate the in-built linear trend of the form μ (t) = α+ β t (Coles
also used an exponential trend in the dispersion parameter σ, but this was not explored in
this paper). Τhus the following procedure was used to calculate an estimate ^
β of a linear
trend parameter β, at each of the five sites in Table 1:
Method 1: G (q) = exp{- [ 1 + ξ ( q – α − β t ) / σ ] -1/ξ (2)

8
with the four parameters α, β, σ and ξ estimated by ML. Standard errors for estimates of
the parameters were calculated from the information matrix 12 ]/log[ −∂∂−∂ jiL θθ evaluated
at the maximum of the log-likelihood function log L (where ji θθ , are the four parameters
taken in pairs) and were used to calculate large-sample confidence intervals for the trend
β. The mean of the distribution in (2) is
α + β t + σ [Γ (1 + ξ ) – 1 ] / ξ (3)
which provides a linear trend with trend coefficient β. It is shown below that, at each of
the five sites, the shape parameter ξ was not large relative to its standard error, suggesting
that the simpler Gumbel distribution, with linear trend incorporated, might also be an
acceptable model for the purposes of this study. Therefore, the GEV reduces to:-
Method 2: G (q) = exp{- exp [- ( q – α − β t ) / σ ] } (4)
which was also used to estimate the trend parameter β , and the standard error of^
β , from
which approximate 95% confidence intervals were calculated . These estimates are also
shown in Table 2.
As a third method, a linear trend was estimated at each site, using the same expression as
that used in ordinary linear regression, with

9
^
β = = =
−−N
i
N
iiii ttttq
1 1
2__
)(/)( (5)
where ti is the i-th year and N is the number of years in the sequence (i =1…N). For any
linear trend model such that q t = α + β t + (possibly, a function of model parameters
which does not involve the data q t) + ε t, the expression in (5) is an unbiased estimator of
β, whatever the distribution of the residuals ε t , whether or not residuals are uncorrelated,
and whether or not the residuals ε t have homoscedastic variance. After estimating the
trend β using (5), the sequence was “de-trended” and the GEV distribution given by (1)
was fitted by ML to give estimates of the remaining three parameters α, σ, ξ. The
variance of a random variable Q with a GEV distribution is (σ / ξ)2 (g 2 - g1 2) where gk =
Γ (1 + k ξ), k= 1,2, so that if the N years are consecutive, the standard error of the trend
estimate ^
β given by (5) is the square root of
var[^
β ] = 12 (σ / ξ)2 (g 2 - g1 2) / [N (N 2 – 1 )] (6)
As mentioned, an advantage of this procedure is that, if the trend can be estimated
efficiently by least squares, estimation of the GEV parameters then requires a search over
the three-dimensional space of α, σ, ξ instead of the four dimensional space for α, σ, ξ ,
β.
Therefore the following method was also used:-
Method 3: Trend estimated by ^
β = 12 =
N
i 1
qi { i - (N+1) / 2 } /[N (N 2 – 1 )]

10
with standard error given by the square root of (6), and with σ, ξ estimated from the de-
trended data sequence.
The variance of a random variable Q with a Gumbel distribution is σ2 π2 / 6, so
that a fourth estimator is given by
Method 4: Trend estimated by ^
β = 12 =
N
i 1
qi { i - (N+1) / 2 } /[N (N 2 – 1 )]
with standard error the square root of var[^
β ] = 2 σ 2 π2 / [N (N 2 – 1 )].
In both Methods 3 and 4, the de-trended sequences no longer consist of
statistically-independent values, because the estimated residuals are linear functions of
the original data sequence { q t }, t = 1…N. It can be shown [e.g., Johnson and Wichern ,
2007] that the de-trended residuals, denoted by r*, are given by r* = (I- H) q where H is
the ‘hat’ matrix H = X (XTX)-1XT, I is the unit matrix, and X is the N×2 matrix with 1’s in
the first column and the year numbers in the second. Thus the covariance between the r-
th and s-th residuals, obtained after de-trending when data are from a GEV distribution, is
[ ≠ srii ,,
h r i h s i – (2 – h r r – h s s) h r s]. (g 2 - g1 2) (σ / ξ)2 (7)
In the case of the Gumbel distribution, the expression in square brackets is multiplied by
σ2 π2 / 6. This covariance structure differs from the covariance structure of (for example)
a lag-one auto-regression, so the type of portmanteau test used to test for serial

11
correlation between values in the original data sequence is no longer appropriate. Thus,
whilst the estimate of trend given by (5) is valid, the presence of correlation between
residuals after de-trending means that the usual log-likelihood function is incorrect. This
may affect estimates of the parameters μ, σ, ξ of the GEV distribution, and hence the
standard error of the trend estimate given by (5).
Methods 1 to 4 above are all based on probability distributions for the sequences
of annual maximum flows. To compare their performance with methods which do not use
such assumptions, two distribution-free procedures were used: namely, a bootstrap
estimate of trend, and the Theil-Sen estimate. Thus:
Method 5: For a data-set of length N years, N pairs of values (t i , q i) were drawn with
replacement, where t i is the year number and q i (i = 1…N) is the annual maximum for
that year. The slope (given by (5) ) and intercept of the sample were calculated, and the
procedure was repeated 600 times; all simulations and boot-strap calculations used 600
repetitions, since this number was recommended by Wilcox [2012] for calculating
confidence intervals for the Theil-Sen trend estimate described below. Quantiles
corresponding to probabilities 0.025 and 0.975 then gave a 95% confidence interval for
the trend β. This procedure is equivalent to a randomly-weighted regression [Venables
and Ripley, 1999]; as an alternative, they suggest (Section 6.6) model-based re-sampling
in which the residuals about the fitted regression are re-sampled. However the calculated
residuals r* do not then have the correct variance, or even the same variance as each
other. Corrections are possible [Venables and Ripley, 1999] but model-based re-sampling

12
was not pursued further in this paper. Methods 3, 4 and 5 all estimate trend by the
expression in (5).
Method 6 estimated trend by means of the Theil-Sen distribution-free procedure.
Trends were calculated as follows: (i) at each site (except for 14 de Julho), the set of
M=70×71/2=2485 differences (qk - qi)/(k - i) for i < k. The median of these differences
gave the Theil-Sen estimate of trend β; (ii) 600 samples of size N annual maxima were
drawn, with replacement, from the record of length N years, and the Theil-Sen estimate of
trend was calculated from each of the 600 samples. Quantiles corresponding to
probabilities 0.025 and 0.975 then gave a 95% confidence interval for the trend β . For
the site 14 de Julho, where two years were missing, the longest period of unbroken record
(1931-2003) was used, giving M = 2701. This procedure differs from that given by
Wilcox [2011] who re-sampled the M differences with replacement. It also differs from
the variant of the Theil-Sen estimator given by Siegel [1982] who determined, for each
sample point (ti, qi), the median mi of the slopes (qj − qi)/(tj − ti) of lines through that
point, and then calculated the overall estimator as the median of these medians.
Results.
Table 2(a) shows estimates of the linear trend parameter estimated by these six
methods. The table shows that differences between estimates of trend obtained by
Method 1 (fitting a GEV by ML, with trend incorporated in the location parameter) and
Method 3 (de-trending by least squares, before fitting a GEV distribution to the de-

13
trended series) are large. Trend estimates from Method 3 are in all cases much larger than
the ML estimates, and in one case (14 de Julho) are several times larger. The same is true
for trend estimates obtained by Method 2 (Gumbel, with trend incorporated in the
location parameter) and Method 4 (Gumbel fitted after de-trending). Where the location
parameters of GEV and Gumbel distributions have trend incorporated, Gumbel estimates
of the trend coefficient β are always larger than those from fitting the GEV distribution,
despite the fact that the shape parameter ξ is not large, relative to its standard error, at any
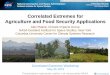
of the five sites, as shown at the bottom of Table 2(a). For Site 14 de Julho, Figure 3
compares the trend estimated by fitting a GEV with trend parameter incorporated
(Method 1), with the least-squares estimate of trend (Methods 3, 4 and 5); visually, the
least-squares fit looks the better fit. Both Theil-Sen estimates of trend β, and the least-
squares estimate of β, are very considerably greater than estimates of β obtained from
both GEV and Gumbel distributions, with or without de-trending. As reported [e.g., Frei,
2011], the Theil-Sen estimates of β are smaller than the ^
β found by least squares.
Table 2(b) shows 95% upper and lower confidence limits, and the width of the
95% confidence intervals, for linear trends estimated by the six methods at the five sites.
For fits by ML, it is assumed that large-sample properties hold so that the approximate
95% confidence intervals are given by ± 2×SE, where the standard error SE is found as
described above. Where the confidence interval brackets zero, the estimated trends are
consistent with a null hypothesis of zero trend; where zero is not bracketed, the null
hypothesis of zero trend would be rejected. In terms of statistical significance, therefore,
results given by the five methods are very different. For the site 14 de Julho, the

14
confidence interval from Method 1 (GEV with incorporated trend) brackets zero, and so
does the confidence interval for Method 2 (Gumbel with incorporated trend), Method 5
(bootstrapped linear regression) and Method 6 (Theil-Sen), whilst the ‘detrended’
methods (Methods 3 and 4) both indicated that the null hypothesis of zero trend should be
rejected. At all five sites, Theil-Sen confidence intervals bracketed zero, showing that
Method 6 always gave estimates of trend consistent with the zero-trend hypothesis.
Confidence-interval widths often differed substantially between methods at any given
site, but no consistent pattern emerges; the widths of confidence intervals where data are
de-trended are usually greater than where trend is built into a distribution’s location
parameter, and the differences are sometimes large.
By comparing the upper and lower confidence limits with the least-squares
estimates of trend shown in Table 2(a), it can also be seen that, at three of the five sites,
the least-squares estimate of trend lay outside the confidence interval for the ML
estimate; at two of the five sites, the Theil-Sen estimate lay outside the confidence
interval for the ML estimate. Interpretation of this result requires caution, however,
because both the least-squares and Theil-Sen estimates are also subject to uncertainty,
and because records at the five sites are to some extent cross-correlated.
Table 2(c) shows how estimates of the location and scale parameters, α (= μ) and
σ, differ when they are estimated from GEV distributions with the trend parameter
incorporated, and from GEV distributions after linear trend has been removed (i.e.,
Methods 1 and 3). Estimates of the GEV distribution’s α (i.e., the location parameter of
the de-trended residuals) are consistently greater when data are de-trended, but the

15
differences are not large; the same is true of estimates of σ, the scale parameter, but here
the differences between Methods 1 and 3 are substantially greater. For the Gumbel
distribution, differences between estimates of α with and without trend removal (Methods
2 and 4) are very small; estimates of the scale parameter are greater where data are de-
trended, but the increases are smaller than those for the GEV distribution. De-trending
has a marked effect on estimates of the shape parameter ξ, shown in Table 2(a); these,
and their standard errors, were substantially reduced where the data were de-trended
before fitting a GEV.
The main point emerging from Tables 2(a), (b) and (c) is that when a trend
coefficient is incorporated into the location parameter (whether GEV or Gumbel) of
annual maximum one-day flows, the estimates of trend were markedly different from any
estimates of trend obtained by least squares, or by Theil-Sen, or even fitting by eye (see
Fig. 3). To explore this in greater detail, samples of size 70 were drawn from five GEV
distributions with parameter values equal to those given in Table 2 (in the case of the
gauge 14 de Julho, for example, the GEV parameters were α = 2522, σ = 1063, ξ =
0.1251, β = 5.626). Six hundred samples were drawn in each case. For each sample, the
trend β was estimated (i) by ML (Method 1), (ii) by ordinary least squares (giving the
estimated trend for Methods 3, 4 and 5), and (iii) by the Theil-Sen estimator (Method 6).
Table 3 gives statistics derived from the 600 generated samples. Comparisons by t-test
between the means of the ^
β ’s over all 600 simulations and the “true” trends shown at
the top of Table 3, show that none of the three methods shows evidence of major bias,
and indeed theory shows that the ML estimates ^
β are unbiased when the sample of years

16
is large. Provided that the trend is linear, least-squares estimates ^
β are unbiased whatever
the length of record. Theory also shows that, given certain regularity conditions [Kendall
et al., 1983] no other estimation procedure will give estimates^
β with smaller variance
than ML estimates when the length of record is sufficiently long (when ML estimates are
“asymptotically efficient”). Table 3 also shows standard deviations (SDs) of the 600
samples at the five sites. The SD for ML estimates ^
β is substantially smaller than the
SDs of either least squares or Theil-Sen estimates, and the SDs of the Theil-Sen estimates
are substantially smaller than the SDs given by least squares. Figure 4 shows a scatter-
diagram for the Site 14 de Julho; the greater variability in the least-squares estimate
“pulls” the line towards the horizontal, giving a slope (0.393) considerably less than 45o.
Correlations between the estimates ^
β obtained from the 600 samples by ML,
least squares and Theil-Sen are shown at the bottom of Table 3; the correlation between
ML and least-squares estimates of trend is lowest at all sites, ranging from about 0.5 to
0.75. Correlation between ML and Theil-Sen estimates is considerably greater, whilst
correlations between least-squares and Theil-Sen estimates are in the range 0.82 to 0.92.
These correlations, together with the asymptotic efficiency of ML estimates
mentioned above, suggest an explanation for the differences between ML and other trend
estimates shown in Table 2(a). The argument is as follows. Consider the probability
distributions of the ML and least-squares estimates of trend (given, in the case of Figure
4, by the projections of points on to the vertical and horizontal axes respectively). The
dispersion of the former (ML) distribution will be less than that of the latter because of

17
ML asymptotic efficiency; both distributions will be centred about the true trend value,
however, because both ML and least-squares estimators are unbiased (the former in large
samples, the latter in samples of any size, when the trend is truly linear). Hence, when the
sample of years in a record of annual maxima gives a trend that is large and positive
when estimated by least squares, the ML estimate of trend will be smaller (closer to the
central value common to both distributions) but still positive (because ML and least-
squares estimates are positively correlated). The converse must also be true: when the
sample of years in the record of annual maxima shows a trend that is small or even
negative when estimated by least squares (i.e., the least squares estimate lies in the left-
hand tail of its probability distribution), the ML estimate will be greater (again, closer to
the central value common to both distributions). A similar argument is developed by
substituting ‘Theil-Sen estimator’ for ‘least-squares estimator’.
Discussion.
The trends in the estimation methods described above are linear trends, and it
could be argued that changes may be episodic rather than linear. The many methods for
modeling episodic changes over time include piece-wise or “broken stick” regression,
with or without continuity at the break-points, the number of which may be known or
unknown [Khodadadi and Asgharian, 2008; Toms and Lesperance, 2003]. Erdman and
Emerson [2007] following Barry and Hartigan [1993] used Bayesian methods to estimate
posterior distributions of parameters θ i {i=1…b} where a data sequence {Xi}, i=1…n is
modeled as b “blocks” with the i-th block specified by θ i which may be (for example) a
distribution mean or a regression coefficient. In the physical context of hydrological

18
extremes, however, results from any analysis of episodic trends will be more acceptable
where changes are known to have occurred at specific times, and from specific causes,
rather than found by using a computer algorithm to determine the number of change
points and the change magnitudes. As far as is known, data used to illustrate methods
described above were not subject to any such specific changes; in the absence of such
knowledge, a linear trend gives a simple description of the way that annual maxima
changed over the period of record.
In an important paper on the calculation of trends and their uncertainties, Cohn
and Lins [2005] explored aspects of the statistical significance of trends in
hydroclimatological time series, concluding that “while trend magnitude can be
determined with little ambiguity, the corresponding statistical significance … is less
certain because significance depends critically on the null hypothesis, which in turn
reflects subjective notions about what one expects to see”. They also concluded that “it
may be preferable to acknowledge that the concept of statistical significance is
meaningless when discussing poorly-understood systems.” The results presented above
suggest that uncertainty is a characteristic not only of the statistical significance of a
trend, as Cohn and Lins state, but also of its magnitude. Two sets of procedures for
estimating trend in annual maximum one-day flows, both arguably valid, have been
shown to give very different results in some specific cases: one set, based on the almost
universal assumption in frequency analyses that annual maxima are statistically
independent with some kind of extreme-value distribution (GEV or Gumbel), and another
set which assumed statistical independence but no distributional form (bootstrap, Theil-
Sen). Table 2(a) shows that estimates of trend given by the two sets of procedures can be

19
markedly different. Furthermore, as confirmation of the statement from Cohn and Lins
[2005] quoted above, the two sets of procedures lead (in the case of the five records here
considered) to different conclusions about the statistical significance of trends, shown by
Table 2(b).
It can be argued [Koutsoyiannis, 2006] that analysing time series of hydrological
or climatic data for trends is in any case illogical, and that “a stochastic approach
hypothesizing stationarity and simultaneously admitting a scaling behaviour reproduces
climatic trends (considering them as large-scale fluctuations) in a manner that is logically
consistent.” Such an approach, based on the well-known Hurst coefficient, “does not
require the separation of the time series into two or more components, so it does not
attempt to de-trend the original series. It admits that the existence of trends is the normal
behaviour of real world time series” [Koutsoyiannis, 2006]. However a careful reading of
his text suggests that Koutsoyiannis’ criticism is levelled principally at the fallacy of
concluding that such “trends” are deterministic. But the term “deterministic” must imply
that present behaviour determines a system’s future behaviour; in the present context
where annual extreme one-day flows are analysed over a period of 70 to 80 years,
changes – where they exist – are almost certainly the consequence of land-use change
from native forest to arable cropping, with no “deterministic” interpretation about future
behaviour possible. It can therefore be argued that in such circumstances, a linear trend
coefficient is a useful summary of past behaviour (although it can never be more than
that; certainly no extrapolation to future years is possible). In a sense, a trend coefficient
b and H coefficient are complementary entities: the former is a statistical summary of
time-series behaviour over a specified period of the past, and the latter is a statistical

20
summary of future long-term behaviour over an indeterminate (but long) period; neither
conveys information about deterministic influences that caused, or will cause, variability
observed in the time-series.
It has been mentioned that the Methods 3 and 4, which de-trended the sequence of
annual maxima before fitting GEV or Gumbel distributions to the de-trended residuals,
introduces a correlation (although not a serial correlation) amongst them. The issue of
introduced correlation appears to be a much wider issue than in the present paper. Where,
for example, future “scenarios” of annual climatic extremes are produced by Global
Climate Models (GCMs), the annual (or seasonal) extremes in the scenario will all be
functions of GCM parameters and their initial values, and will remain so however many
“members” are calculated in the scenario. A similar argument would appear to hold
where coupled climate-hydrological models are used to produce future scenarios of
extreme flows. Further research is required to explore whether such introduced
correlations are important or whether they can be safely ignored.
In conclusion, we return to the title of this paper: how should trends in hydrologic
extremes be estimated? The answer is that the method must depend on the context, and
no single method can be recommended for all circumstances. We illustrate with three
cases: (i) where the context requires exploration of the causes of trend (i.e., determination
of whether certain predictors explain the trend fully, partially, or not at all) then a
parametric approach is required, with assumptions – to be verified subsequently – about
underlying probability distributions that allow the use of likelihood theory for hypothesis

21
testing (or, in a Bayesian context, for calculating the posterior probability distribution of a
trend). This would rule out the use of distribution-free methods such as bootstrapping or
Theil-Sen estimation. If, however, (ii) the context requires the exploration of a regional
average trend of, say, annual maximum n-day rainfalls measured at P sites within the
region, distribution-free methods could be used; the trend could be estimated by either
bootstrapping or Theil-Sen at each of the P sites, with standard geostatistical methods
used to calculate the regional trend and its uncertainty. Again (iii) if it were required to
estimate the difference between trends at two or more sites, so that estimating differences
between trends is more important than obtaining good estimates of the trend at each site
separately, then any of the methods compared above could be used (although if the
uncertainty in the differences were also to be estimated, this would complicate the use of
Theil-Sen and bootstrap methods). Whichever methods are used, the estimates of trend
may differ from method to method; the uncertainty as measured by confidence intervals
may differ; and (with due reminder of the warning of Cohn and Lins [2005] referred to
above) if significance-testing is required, conclusions about significance may vary from
one method to another.
Conclusion.
A comparison of six procedures for estimating trend β in annual maximum one-
day river flows at five sites showed marked differences between, on the one hand,
estimates obtained by incorporating trend into the GEV location parameters; and on the
other hand, estimates found by (i) trend removal by least squares prior to fitting the GEV,

22
(ii) boot-strap sampling, and (iii) Theil-Sen estimation. The same was true where trend
had been incorporated into the Gumbel location parameter. Comparison of approximate
95% confidence intervals for β given by the different methods, showed that 95%
confidence limits given by the different methods bracketed zero for some of the six
methods, whilst for others, they did not, so that different conclusions about statistical
significance would be drawn according to which method was used to estimate the trend.
Acknowledgement.
The author is grateful to Professor Juan Martin Bravo for making daily flow records
available, and to anonymous reviewers for constructive comments.

23
References.
Barry, D., and J. A. Hartigan (1993) A Bayesian analysis for Change-Point Problems, J. American Statist. Ass., 35(3), 309-319. Box, G. E. P., G. M. Jenkins and G. C. Reinsel (2009) Time Series Analysis: Forecasting and Control, Pearson Education (US), N. J. Burn, D. H., M. Sharif and K. Zhang (2010) Detection of trends in hydrological extremes for Canadian watersheds, Hydrol. Process., 24, 1781-1790. Cohn, T. A. and H. F. Lins (2005), Nature’s style: Naturally trendy, Geophys. Res. Lett., 32, L23402, doi:10.1029/2005GL024476. Coles, S. (2001) An Introduction to Statistical Modeling of Extreme Values, Springer- Verlag, London. Erdman, C., and J. W. Emerson (2007) bcp: An R Package for Performing a Bayesian Analysis of Change Point Problems, J. Statist. Software, 23(3), 1-13. Frei, C. (2011) Analysis of Climate and Weather Data. Section 3 of “Trend Analysis, |HS 2011” http://www.iac.ethz.ch/edu/courses/master/electives/acwd/Trend.pdf. Hannaford, J. and G. Buys (2012) Trends in seasonal river flow in the UK, J. Hydrol.,, 475, 158-174. Hannaford, J. and T. J. Marsh (2008) High flow and flood trends in a network of undisturbed catchments in the UK, Int. J. Climatol., 28, 1325-1338. Heffernan, J. E. and A. G. Stephenson (2013) An Introduction to Statistical Modeling of Extreme Values; package ‘ismev’ , http://www.ral.ucar.edu/~ericg/softextreme.php. Hodgkins, G. A. and R. W. Dudley (2006) Changes in the timing of winter-spring streamflows in eastern North America, 1913-2002, Geophys. Res. Lett., 33, L06402. Hosking, J. R. M. and J. R. Wallis (1997) Regional Frequency Analysis, Cambridge University Press, Cambridge, UK. Johnson, R. A. and D. W. Wichern (2007) Applied Multivariate Statistical Analysis (6th edition), Pearson Education (US), N.J. Kendall, M., A. Stuart and J. K. Ord (1983). The Advanced Theory of Statistics, vol.2,

24
Design and Analysis and Time Series, 4th ed., 780 pp., Oxford Univ. Press, Oxford, UK. Khodadadi, A. and M. Asgharian (2008) Change-point Problem and Regression: An Annotated Bibliography. COBRA Preprint Series. Working Paper 44, Montreal, Canada. Koutsoyiannis D (2006) Nonstationarity versus scaling in hydrology, J. Hydrol., 324, 239–254. Marsh, T. J. and C. L. Harvey (2012) The Thames Flood Series – a lack of trend in flood magnitude and a decline in maximum levels, Hydrol. Res., 43, 203-214. Novotny, E. V. and H. G. Stefan (2007) Streamflow in Minnesota: indicator of climate change, J. Hydrol., 334, 319-333.
Petrow, T. and B. Merz (2009) Trends in flood magnitude, frequency and seasonality in Germany in the period 1951-2002. J. Hydrol., 371, 129-141.
Siegel, A. F. (1982) Robust regression using repeated medians, Biometrika 69 (1): 242–
244, doi:10.1093/biomet/69.1.242. Svensson, C., J. Hannaford, Z. W. Kundzewicz and T. Marsh (2006) Trends in river floods: why is there no clear signal in observations? In: Frontiers of Flood Research (Proceedings of Kovacs Colloquium, Paris, June 2006), Publication 305, IAHS Press, Wallingford, UK. Toms, J. D. and M L Lesperance (2003). Piecewise regression: A tool for identifying ecological thresholds, Ecology, 84, 2034-2041, http://dx.doi.org/10.1890/02-0472 Venables, W. N. and B. D. Ripley (1999) Modern Applied Statistics with S_PLUS (Third Edition) Springer-Verlag, New York.
VSN International (2012). GenStat for Windows 15th Edition. VSN International, Hemel Hempstead, UK. Web page: GenStat.co.uk
Wilcox, R R (2012) Introduction to Robust Estimation and Hypothesis Testing (3rd edition, revised), Academic Press Inc, Amsterdam.

25
Wilson, D., H. Hisdal and D. Lawrence (2010) Has streamflow changed in the Nordic countries? Recent trends and comparisons to hydrological projections, J. Hydrol., 394, 334-346.

26
Table 1(a): Descriptions of drainage basins, Rio Grande do Sul, Southern Brazil
Gauge site: Code River: Latitude: Longitude: Area(km2): Annual P
14 de Julho 284 R. Antas -29.0648 -51.6749 12835 1613 1
Castro Alves 98 R. Antas -29.0056 -51.3844 7784 1617 2
Chapeco 94 R. Uruguai -27.1416 -53.0449 52949 1650 3
Ernestina 110 R. Uruguai -28.5556 -52.5456 1047 1646 4
Ita 92 R. Uruguai -27.2767 -52.3822 43954 1623 5
Periods: 1944-2010 1; 1944-2010 2; 1957-2010 3; 1930-1985 4; 1958-2008 5
Table 1(b): Summary statistics of annual maximum one-day flows. Q1 and Q3 are the
first and third quantiles:
Min: Q1: Median: Q3: Max:
14 de Julho 1170 2045 2938 3910 6912
Castro Alves 559 1097 1499 2391 4507
Chapeco 1434 5946 8583 12731 25466
Ernestina 54 154 221 326 729
Ita 1446 5067 7821 11332 25544

27
Table 2(a): Trends (m3s-1yr-1)obtained when trend is incorporated in location parameter
of GEV and Gumbel distributions: i.e., GEV(μ + β t, σ, ξ) and Gumbel (μ + β t, σ )
(Methods 1 and 2),; be removing trend and fitting GEV(μ , σ, ξ) and Gumbel (μ , σ ) to
the residuals (Methods 3 and 4); by bootstrapped Linear Regression (Method 5) with 600
boot-strapped samples, and by using the Theil-Sen estimate (Method 6) with 600 boot-
strapped samples.
Site:
14 de Julho Castro Alves Chapeco Ernestina Ita
Method:
1 5.63 9.80 58.00 1.94 44.61
2 8.47 12.68 62.47 2.11 47.45
3 ]
4 ] 20.88 18.99 86.50 3.85 60.00
5 ]
6 15.63 17.55 79.50 3.67 59.42
Estimates of shape parameter ξ in GEV(μ + β t, σ, ξ), and of ξ in GEV(μ , σ, ξ) after de-
trending:
Method 1 0.1251 0.2249 0.0894 0.0372 0.1426
SE(ξ ) ± 0.1345 ± 0.1306 ± 0.1171 ± 0.1220 ± 0.1311
Method 3: -0.0725 0.0597 0.0340 -0.1133 0.1202
SE(ξ ) ± 0.1083 ± 0.1029 ± 0.0996 ± 0.0716 ± 0.1262

28
Table 2(b): Approximate 95% lower and upper confidence limits (denoted by L, U), and
width of confidence intervals. Units: (m3s-1yr-1).
Site:
14 de Julho Castro Alves Chapeco Ernestina Ita
Method 1:
L -5.64 3.32 17.76 0.27 11.47
U 16.89 16.26 98.24 3.60 77.75
Width: 22.53 12.94 80.48 3.33 66.28
Method 2:
L -3.20 4.92 19.37 0.78 8.89
U 20.15 20.43 105.57 3.44 86.01
Width: 23.35 15.51 86.20 2.66 77.12
Method 3:
L 9.48 11.93 38.08 2.36 19.22
U 32.34 25.41 135.72 5.36 98.78
Width: 22.86 13.48 97.64 3.10 79.56
Method 4:
L 7.79 10.31 32.78 2.29 12.64
U 34.03 27.03 141.02 5.43 105.36
Width: 26.03 16.72 108.24 3.14 92.72
Method 5:

29
L -5.53 7.80 36.80 2.03 17.20
U 37.24 31.07 133.90 5.62 104.60
Width: 42.37 23.27 97.10 3.59 87.40
Method 6:
L -15.54 -7.82 -51.74 -1.43 -47.45
U 17.02 8.66 50.19 1.44 49.64
Width: 32.56 16.48 101.93 2.87 97.09

30
Table 2(c): Estimates of location parameter α (= μ) and scale parameter σ, from methods
with and without de-trending by least squares. Values of ξ, where relevant, are shown at
the bottom of Table 2(a).
Method 1 (GEV, trend parameter incorporated in location parameter):
α: 2522 1364 7514 195.9 6392
σ: 1063 566.9 3670 106.4 3143
Method 2 (Gumbel, trend parameter incorporated in location parameter):
α: 2598 1439 7699 198.3 6647
σ: 1129 636.5 3818 108.2 3364
Method 3 (GEV, data de-trended):
α: 2639 1418 7622 205.0 6429
σ: 1221 644.8 3838 120.1 3200
Method 4 (Gumbel, data de-trended):
α: 2593 1438 7694 197.8 6646
σ: 1151 660.2 3889 118.1 3383

31
Table 3: Statistics derived from 600 simulated samples, at each of the 5 sites, drawn from
GEV(α + β t, σ, ξ), with parameters α , σ, ξ, β given in Table 2. Means, standard
deviations and standard errors of means, are given for 600 maximum-likelihood estimates ^
β ML, 600 least-squares estimates ^
β LS , and 600 Theil-Sen estimates ^
β TS. Correlations
between maximum-likelihood and least-squares estimates are denoted by r ML,LS .
Similarly for r ML,TS and r TS,LS.
14 de Julho Castro Alves Chapeco Ernestina Ita
“True” value: 5.626 9.795 58.00 1.938 44.610
Mean ^
β ML 5.742 9.727 58.757 1.931 44.122
SE(Mean) ± 0.248 ±0.125 ±0.883 ± 0.027 ± 0.698
SD(^
β ML ) ±6.083 ±3.059 ±21.612 ±0.659 ±17.083
Mean ^
β LS 6.094 9.608 56.901 1.929 44.437
SE(Mean) ± 0.388 ±0.265 ±1.291 ± 0.035 ± 1.258
SD(^
β LS ) ±9.496 ±6.489 ±31.588 ±0.853 ±30.797
Mean^
β TS 5.879 9.704 57.546 1.931 44.619
SE(Mean) ± 0.310 ± 0.169 ± 1.041 ± 0.027 ± 0.698
SD(^
β TS ) ±7.589 ±4.138 ±25.469 ±0.753 ±22.367

32
r ML,LS 0.613 0.472 0.686 0.751 0.557
r ML,TS 0.791 0.706 0.827 0.858 0.757
r TS,LS 0.877 0.820 0.832 0.917 0.863

33
Figure legends.
Figure 1: Annual maximum one-day flows at five sites, standardized by subtracting the
mean of the sequence and dividing by its standard error.
Figure 2: Site 14 de Julho: quantile-quantile plot when GEV distribution is fitted.
Figure 3. Site 14 de Julho: trends estimated from GEV distribution with trend parameter
incorporated (Method 1: broken black line), and by least-squares fit (Methods 3, 4 and 5:
broken red line). Symbols: YML: trend by maximum likelihood; YR: year; YLS: least
squares; Q: annual maximum discharge.
Figure 4 : Estimate b of trend coefficient β in 600 samples of size 70 “years” drawn
from a GEV distribution with parameters equal to those estimated for the site 14 de Julho.
Red line shows the 45o line. Ordinates along vertical axis are the estimates of β when
trend was incorporated into the GEV distribution; abscissa along the horizontal axis are
estimates of β found be least squares (as for boot-strapped estimate, and de-trended
values subsequently fitted to GEV(α, σ, ξ) ).

34
Figure 1: Annual maximum one-day flows at five sites, standardized by subtracting the
mean of the sequence and dividing by its standard error.

35
Figure 2: Site 14 de Julho: quantile-quantile plot when GEV distribution is fitted.

36
Figure 3. Site 14 de Julho: trends estimated from GEV distribution with trend parameter
incorporated (Method 1: broken black line), and by least-squares fit (Methods 3, 4 and 5:
broken red line). Symbols: YML: trend by maximum likelihood; YR: year; YLS: least
squares; Q: annual maximum discharge.

37
Figure 4 : Estimate b of trend coefficient β in 600 samples of size 70 “years” drawn
from a GEV distribution with parameters equal to those estimated for the site 14 de Julho.
Red line shows the 45o line. Ordinates along vertical axis are the estimates of β when
trend was incorporated into the GEV distribution; abscissa along the horizontal axis are
estimates of β found be least squares (as for boot-strapped estimate, and de-trended
values subsequently fitted to GEV(α, σ, ξ) ).