Embed Size (px)
Citation preview

Hough Transform
600.658 - Seminar on Shape Analysis and Retrieval
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 1 of 40

Detection of arbitrary shapes
Partial shape matching can also be viewed as detectingarbitrary shapes
Hough transform is a method for estimating the parameters ofa shape from its boundary points
The idea can be generalized to estimate “parameters” ofarbitrary shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 2 of 40

Outline
1 Hough Transform for Analytical ShapesVoting in Parameter SpaceUsing Directional InformationError Compensation: Smoothing
2 Generalizing to Non-Analytical Shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 3 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Outline
1 Hough Transform for Analytical ShapesVoting in Parameter SpaceUsing Directional InformationError Compensation: Smoothing
2 Generalizing to Non-Analytical Shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 4 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Straight line
[2]
Normal parameterization:x cos θ + y sin θ = ρ
Points in picture ↔ sinusoids inparameter space
Points in parameter space ↔ lines inpicture
Sinusoids corresponding to co-linearpoints intersect at an unique point
Example
Line: 0.6x + 0.4y = 2.4Sinusoids intersect at: ρ = 2.4, θ = 0.9273
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 5 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Straight line
[2]
Normal parameterization:x cos θ + y sin θ = ρ
Points in picture ↔ sinusoids inparameter space
Points in parameter space ↔ lines inpicture
Sinusoids corresponding to co-linearpoints intersect at an unique point
Example
Line: 0.6x + 0.4y = 2.4Sinusoids intersect at: ρ = 2.4, θ = 0.9273
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 6 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Straight line
[2]
Normal parameterization:x cos θ + y sin θ = ρ
Points in picture ↔ sinusoids inparameter space
Points in parameter space ↔ lines inpicture
Sinusoids corresponding to co-linearpoints intersect at an unique point
Example
Line: 0.6x + 0.4y = 2.4Sinusoids intersect at: ρ = 2.4, θ = 0.9273
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 7 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Straight line
Normal parameterization:x cos θ + y sin θ = ρ
Points in picture ↔ sinusoids inparameter space
Points in parameter space ↔ lines inpicture
Sinusoids corresponding to co-linearpoints intersect at an unique point
Example
Line: 0.6x + 0.4y = 2.4Sinusoids intersect at: ρ = 2.4, θ = 0.9273
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 8 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Outline
1 Hough Transform for Analytical ShapesVoting in Parameter SpaceUsing Directional InformationError Compensation: Smoothing
2 Generalizing to Non-Analytical Shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 9 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 10 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 11 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 12 of 40
Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
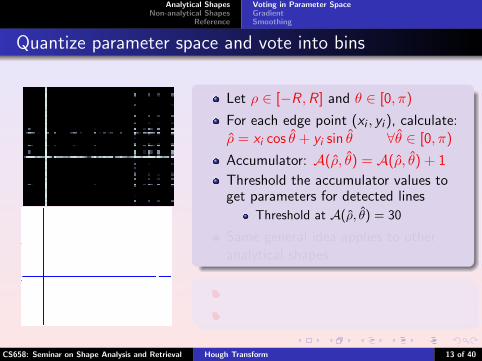
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Threshold at A(ρ̂, θ̂) = 30
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 13 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Threshold at A(ρ̂, θ̂) = 20
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 14 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Threshold at A(ρ̂, θ̂) = 15
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 15 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Threshold at A(ρ̂, θ̂) = 15
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 16 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Threshold at A(ρ̂, θ̂) = 15
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 17 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Quantize parameter space and vote into bins
Let ρ ∈ [−R,R] and θ ∈ [0, π)
For each edge point (xi , yi ), calculate:ρ̂ = xi cos θ̂ + yi sin θ̂ ∀θ̂ ∈ [0, π)
Accumulator: A(ρ̂, θ̂) = A(ρ̂, θ̂) + 1
Threshold the accumulator values toget parameters for detected lines
Threshold at A(ρ̂, θ̂) = 15
Same general idea applies to otheranalytical shapes
O(nd1) computation, instead of O(n2)
Can we do better?
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 18 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Outline
1 Hough Transform for Analytical ShapesVoting in Parameter SpaceUsing Directional InformationError Compensation: Smoothing
2 Generalizing to Non-Analytical Shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 19 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Use what you have already got!
More parameters ⇒ More computation and storage
Gradient information reduces one more free parameter
For circle: center lies r units along the gradient
Rotation affects the gradient direction only
f (x,p) = (x − a)2 + (y − b)2 − r2 = 0 p = (a, b, r),x = (x , y)dfdx (x,p) = 0dydx = tan
[φ(x)− π
2
]φ(x) is the gradient direction
Update A(p) if f (x,p) = 0 and dfdx (x,p) = 0
dydx = tan
[φ(x)− θ − π
2
]CS658: Seminar on Shape Analysis and Retrieval Hough Transform 20 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Use what you have already got!
More parameters ⇒ More computation and storage
Gradient information reduces one more free parameter
For circle: center lies r units along the gradient
Rotation affects the gradient direction only
f (x,p) = (x − a)2 + (y − b)2 − r2 = 0 p = (a, b, r),x = (x , y)dfdx (x,p) = 0dydx = tan
[φ(x)− π
2
]φ(x) is the gradient direction
Update A(p) if f (x,p) = 0 and dfdx (x,p) = 0
dydx = tan
[φ(x)− θ − π
2
]CS658: Seminar on Shape Analysis and Retrieval Hough Transform 21 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Use what you have already got!
More parameters ⇒ More computation and storage
Gradient information reduces one more free parameter
For circle: center lies r units along the gradient
Rotation affects the gradient direction only
f (x,p) = (x − a)2 + (y − b)2 − r2 = 0 p = (a, b, r),x = (x , y)dfdx (x,p) = 0dydx = tan
[φ(x)− π
2
]φ(x) is the gradient direction
Update A(p) if f (x,p) = 0 and dfdx (x,p) = 0
dydx = tan
[φ(x)− θ − π
2
]CS658: Seminar on Shape Analysis and Retrieval Hough Transform 22 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Use what you have already got!
More parameters ⇒ More computation and storage
Gradient information reduces one more free parameter
For circle: center lies r units along the gradient
Rotation affects the gradient direction only
f (x,p) = (x − a)2 + (y − b)2 − r2 = 0 p = (a, b, r),x = (x , y)dfdx (x,p) = 0dydx = tan
[φ(x)− π
2
]φ(x) is the gradient direction
Update A(p) if f (x,p) = 0 and dfdx (x,p) = 0
dydx = tan
[φ(x)− θ − π
2
]CS658: Seminar on Shape Analysis and Retrieval Hough Transform 23 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Use what you have already got!
More parameters ⇒ More computation and storage
Gradient information reduces one more free parameter
For circle: center lies r units along the gradient
Rotation affects the gradient direction only
f (x,p) = (x − a)2 + (y − b)2 − r2 = 0 p = (a, b, r),x = (x , y)dfdx (x,p) = 0dydx = tan
[φ(x)− π
2
]φ(x) is the gradient direction
Update A(p) if f (x,p) = 0 and dfdx (x,p) = 0
dydx = tan
[φ(x)− θ − π
2
]CS658: Seminar on Shape Analysis and Retrieval Hough Transform 24 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Outline
1 Hough Transform for Analytical ShapesVoting in Parameter SpaceUsing Directional InformationError Compensation: Smoothing
2 Generalizing to Non-Analytical Shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 25 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Compensating for errors
Errors can cause A(p′) to beincremented, where p′ is closeto the actual parameter p
Compensate for the uncertaintyof measurement in parameterspace
Smooth the accumulator byincrementing counts of nearbycells accroding to somepoint-spread function h
Equivalent to convolving A ∗ h
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 26 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Compensating for errors
[1]
Errors can cause A(p′) to beincremented, where p′ is closeto the actual parameter p
Compensate for the uncertaintyof measurement in parameterspace
Smooth the accumulator byincrementing counts of nearbycells accroding to somepoint-spread function h
Equivalent to convolving A ∗ h
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 27 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Compensating for errors
[1]
Errors can cause A(p′) to beincremented, where p′ is closeto the actual parameter p
Compensate for the uncertaintyof measurement in parameterspace
Smooth the accumulator byincrementing counts of nearbycells accroding to somepoint-spread function h
Equivalent to convolving A ∗ h
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 28 of 40

Analytical ShapesNon-analytical Shapes
Reference
Voting in Parameter SpaceGradientSmoothing
Compensating for errors
[1]
Errors can cause A(p′) to beincremented, where p′ is closeto the actual parameter p
Compensate for the uncertaintyof measurement in parameterspace
Smooth the accumulator byincrementing counts of nearbycells accroding to somepoint-spread function h
Equivalent to convolving A ∗ h
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 29 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
Outline
1 Hough Transform for Analytical ShapesVoting in Parameter SpaceUsing Directional InformationError Compensation: Smoothing
2 Generalizing to Non-Analytical Shapes
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 30 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
The R-table
Any shape is specified by the set of boundary points B = {xB}For a shape, define p as: p = {x0, s, θ}For each xB , compute r = x0 − xB , and store as function of φ
For each edge pixel x (with gradient direction φ(x)) in animage, obtain r from the table and update A(x + r)
i φi Rφi
0 0 {r|x0 − r = xB , xB ∈ B, φ(xB) = 0}1 ∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = ∆φ}2 2∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = 2∆φ}
. . . . . . . . .
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 31 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
The R-table
Any shape is specified by the set of boundary points B = {xB}For a shape, define p as: p = {x0, s, θ}For each xB , compute r = x0 − xB , and store as function of φ
For each edge pixel x (with gradient direction φ(x)) in animage, obtain r from the table and update A(x + r)
i φi Rφi
0 0 {r|x0 − r = xB , xB ∈ B, φ(xB) = 0}1 ∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = ∆φ}2 2∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = 2∆φ}
. . . . . . . . .
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 32 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
The R-table
Any shape is specified by the set of boundary points B = {xB}For a shape, define p as: p = {x0, s, θ}For each xB , compute r = x0 − xB , and store as function of φ
For each edge pixel x (with gradient direction φ(x)) in animage, obtain r from the table and update A(x + r)
i φi Rφi
0 0 {r|x0 − r = xB , xB ∈ B, φ(xB) = 0}1 ∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = ∆φ}2 2∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = 2∆φ}
. . . . . . . . .
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 33 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
The R-table
Any shape is specified by the set of boundary points B = {xB}For a shape, define p as: p = {x0, s, θ}For each xB , compute r = x0 − xB , and store as function of φ
For each edge pixel x (with gradient direction φ(x)) in animage, obtain r from the table and update A(x + r)
i φi Rφi
0 0 {r|x0 − r = xB , xB ∈ B, φ(xB) = 0}1 ∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = ∆φ}2 2∆φ {r|x0 − r = xB , xB ∈ B, φ(xB) = 2∆φ}
. . . . . . . . .
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 34 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
Transformations of the R-table
Let R(φ) be the R-table for a shape S
Scale: Ts [R(φ)] = sR(φ)
Scale all the vectors r by s
Rotation: Tθ[R(φ)] = Rot{R[(φ− θ)mod2π], θ}Change the indices φ to (φ− θ)mod2π, find correspondingvectors r and rotate them by θ
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 35 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
Hough transform for composite shapes
Let a shape S have two subparts S1 and S2 with respectivereference points x0, x0
1, and x02
Compute r1 = x0 − x01 and r2 = x0 − x0
2
R-table for composite shape:Rs(φ) = [Rs1(φ) + r1]∪̇[Rs2(φ) + r2]
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 36 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
Hough transform for composite shapes
Let a shape S have two subparts S1 and S2 with respectivereference points x0, x0
1, and x02
Compute r1 = x0 − x01 and r2 = x0 − x0
2
R-table for composite shape:Rs(φ) = [Rs1(φ) + r1]∪̇[Rs2(φ) + r2]
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 37 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
Hough transform for composite shapes
Let a shape S have two subparts S1 and S2 with respectivereference points x0, x0
1, and x02
Compute r1 = x0 − x01 and r2 = x0 − x0
2
R-table for composite shape:Rs(φ) = [Rs1(φ) + r1]∪̇[Rs2(φ) + r2]
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 38 of 40

Analytical ShapesNon-analytical Shapes
Reference
The R-tableComposite ShapesIncrementation Strategies
Incrementation Strategies
Increment the accumulator by a value depending on thegradient: A(p) = A(p) + g(∇x)
Increment by larger values if neighbouring points areincrementing the same reference point
Try to find progressively longer connected segments usingdynamic programming
Weigh different parts of a composite object differently
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 39 of 40

Analytical ShapesNon-analytical Shapes
Reference
References
D. H. BallardGeneralizing the Hough Transform to Detect Arbitrary ShapesPattern Recognition, 13(2):111-122, 1981.
R. O. Duda and P. E. HartUse of the Hough Transformation to Detect Lines and Curvesin PicturesCommunications of Association for Computing Machinery,15(1):11-15, 1972.
CS658: Seminar on Shape Analysis and Retrieval Hough Transform 40 of 40





























