Embed Size (px)
Citation preview
Holographic aperture ladar
Bradley D. Duncan1,* and Matthew P. Dierking2
1University of Dayton Electro-Optics Program 300 College Park Dayton, Ohio 45469-0245, USA2EO Combat ID Branch 3109 Hobson Way Building 622, AFRL/RYJM Wright-Patterson AFB,
Ohio 45433-7700, USA; [email protected]
*Corresponding author: [email protected]
Received 19 August 2008; revised 18 December 2008; accepted 29 January 2009;posted 2 February 2009 (Doc. ID 100381); published 19 February 2009
Holographic aperture ladar is a variant of synthetic aperture ladar that seeks to increase cross-rangescene resolution by synthesizing a large effective aperture through the motion of a smaller receiver andthrough the subsequent proper phasing and correlation of the detected signals in postprocessing. Unlikein conventional synthetic aperture ladar, however, holographic aperture ladar makes use of a two-dimensional translating sensor array, not simply a translating point detector. Also unlike in conventionalsynthetic aperture ladar, holographic aperture images will be formed in the two orthogonal cross-rangedimensions parallel and perpendicular to the sensor platform’s direction of motion. The central focus is onthe development of the stripmap and spotlight holographic aperture transformations. These transforma-tions will allow sequentially collected pupil plane field segments to be coherently stitched together inorder to synthesize complex pupil plane fields with larger spatial extent. The challenge in this processis in accounting for the practical fact that both the receiver aperture and the transmitter will be inmotionin real-world airborne applications. However, we demonstrate that, owing to the synchronous motion ofthe transmitter and receiver, resolution enhancements of more than two (stripmap case) or three (spot-light case) times the ratio of the synthetic aperture to the real receiver aperture diameter can be realized.We also demonstrate that in practical applications the holographic aperture ladar image formation pro-cess is relatively insensitive to scene depth if a good estimate of nominal scene range is available.© 2009 Optical Society of AmericaOCIS codes: 120.0280, 280.3640, 280.4788, 280.6730.
1. Introduction
Traditional synthetic aperture radar (SAR) and la-dar (SAL) imaging methods rely on the availabilityof temporally coherent return data and the use ofmatched filter pulse compression techniques in orderto achieve high range resolution. While for a singlepulse good range resolution is obtained via temporalpulse compression, cross-range resolution is oftenpoor and diminishes with range as the transmittedpulse continues to diffract. High resolution in thelongitudinal cross-range dimension (i.e., in the direc-tion of flight in the case of an airborne SAR or SALsensor) is instead achieved by using a single antennaor detector acting in essence as a point receiver (RX)
to collect spatially coherent data at multiple uni-formly spaced locations along an extended path.By combining the cross-range data in postdetectionsignal processing, an effectively larger cross-rangeRX aperture can be synthesized, thereby resultingin increased cross-range resolution. The result of thisextensive postprocessing is a 2D (i.e., range and long-itudinal cross-range) map, or image, of object scenereflectivity at the interrogation wavelength [1–7].
Holographic aperture ladar (HAL) is a variant ofSAL in that it is a method of increasing the abilityof an optical imaging system to resolve fine cross-range scene detail by synthesizing a large effectiveaperture through the motion of a smaller RX andthrough the subsequent proper phasing and correla-tion of the detected signals in postprocessing. Unliketraditional SAR and SAL, however, HAL will make
0003-6935/09/061168-10$15.00/0© 2009 Optical Society of America
1168 APPLIED OPTICS / Vol. 48, No. 6 / 20 February 2009

use of a two-dimensional translating sensor array,not simply a translating point detector.The general concept of holographic aperture ima-
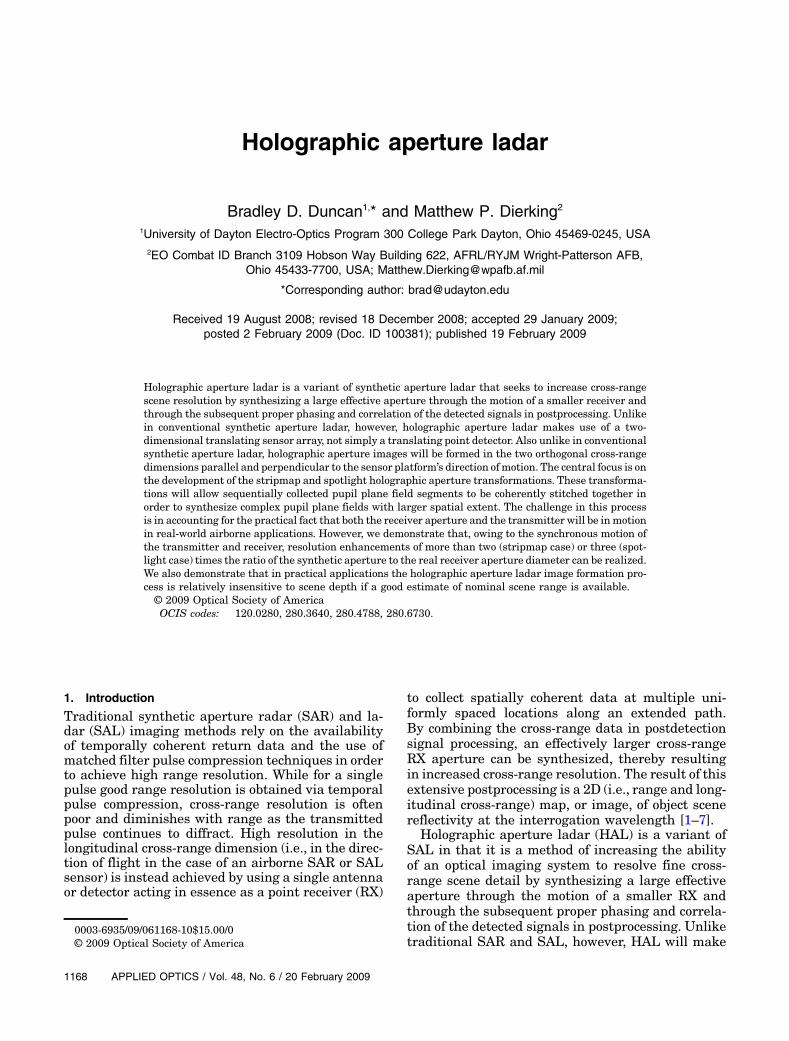
ging is shown notionally in Fig. 1. In this figure weshow a single translating sensor array being used tosequentially capture multiple longitudinal cross-range segments of the incoming complex (i.e., ampli-tude and phase) pupil plane field. Although directpupil plane measurements are possible [8–10], duein part to the benefits of aperture gain in an imagingconfiguration, we assume in Fig. 1 that image planemeasurements are made. More specifically, the com-plex field at the image plane can be determined bycapturing an image of a coherently illuminated sceneat each subaperture location. By interfering eachscene subimage with a known optical master oscilla-tor, not shown in Fig. 1, the image plane amplitudeand phase can be recorded and extracted in post pro-cessing, for example, through use of phase steppinginterferometry [9]. The pupil plane complex fieldsegments associated with each subaperture capturelocation are then related to the image plane mea-surements through an inverse Fourier transform op-eration, after which the subaperture fields are placedin a single synthetic pupil plane matrix according toone of the HAL transformations to be developed inthe following sections. A higher-resolution image isthen synthesized digitally by first applying a virtuallens to the synthetic pupil plane field and propagat-ing to a virtual focal plane detector, the image planefield being formed via discrete Fourier transform.The synthetic image is then the squared modulus ofthe result.The focus of this paper will be on how the indivi-
dual pupil plane field segments can be properlystitched or phased together to synthetically form acomplex pupil plane field with a larger spatial ex-tent. The challenge in this process will be in account-
ing for the practical fact that both the RX apertureand the transmitter (TX) will both be in synchronousmotion (i.e., with equal velocities) in real-world air-borne HAL sensor applications. To our knowledgethis issue has not been sufficiently addressed in theliterature, although some aspects of HAL have beenpreviously examined [9,10].
We have come to call this area of research “holo-graphic” aperture ladar because we are working inthe optical regime where only time-averaged inten-sity records are currently possible. Most likely, then,by using 2D interferograms recorded in either thepupil or image planes at each subaperture collectionsite, we wish to reconstruct (digitally) and properlystitch together the complex pupil field segmentsfound for each subaperture [8–11]. However, whilethe notion of reconstructing complex fields frominterference records is generally reminiscent ofholography, we do not claim that traditional holo-graphic methods for determining the complex pupilplane field segments must necessarily be employedor are that they are even required. Neverthelessthe idea of holographic aperture ladar seems to cap-ture and call to mind the essential elements of ourtechnique.
In this paper we will assume that the complex pu-pil plane field segments are available to us withoutregard to how they were obtained. We will insteadfocus primarily on developing the transformationsthat will allow complex pupil plane field segments tobe stitched together coherently. We will also presentsome intriguing consequences related to 2D high-resolution image formation. Unlike in traditionalSAR–SAL, however, the images that we will discusswill be formed in the two orthogonal cross-range di-mensions, sometimes known as angle–angle imaging[11]. That is, our image coordinates will be in thelongitudinal cross-range dimension, parallel to thedirection of flight, and the transverse cross-range di-mension, perpendicular to the direction of flight, as-suming an airborne sensor platform. In our workhere we will also consider only a single translatingsubaperture. As a result, the transverse cross-rangeresolution will be dictated by the subaperture pupildimensions alone. On the other hand, the longitudi-nal cross-range resolution will be enhanced, as in thecase of traditional SAR–SAL, by virtue of the syn-thetic aperture created through longitudinal motionof the subaperture sensor array [6].
While target range and scene depth informationwill be encoded within the synthetic pupil plane field,as in conventional holography, we will demonstratethat in practical applications the HAL transforma-tion process is relatively insensitive to scene depthif a good estimate of nominal scene range is avail-able. Nevertheless, we envision that this informationmay be extracted, allowing 3D (i.e., angle–angle–range) imaging, if additional variability is introducedinto the system, e.g., via temporal waveform shapingand conventional pulse compression or multiplewavelength sensing schemes [3,12–14]. Extracting
Fig. 1. Notional depiction of a HAL system. The imaging sensor isassumed to be moving in the direction of flight of an airborne plat-form. For clarity, the TX and the RXmaster oscillator (MO) are notshown.
20 February 2009 / Vol. 48, No. 6 / APPLIED OPTICS 1169

scene depth information will, however, be a topic forfurther research and discussion.
2. Stripmap HAL Transformation
The central issue to be overcome in properly phasingtogether multiple pupil plane field segments cap-tured across the synthetic aperture is the fact thatboth the TX and RX aperture will be in synchronous,ideally linear, motion. The transformations we willdevelop in this and the following section will effec-tively allow us to relocate the TX to a fixed positionat the center of the RX plane coordinate system forall shots taken across the synthetic aperture.In this section we will develop the side looking
stripmap HAL transformation. In this scenario theTX beam is always directed orthogonal to the direc-tion of sensor motion in such a way that the illumi-nation beam sweeps linearly across the scene ofinterest. In all cases we will assume that the targetis fully (i.e., flood) illuminated by a single, thoughmoving, coherent TX beam for all shots across thesynthetic aperture, and that the scene remains un-changed over multiple looks. As ladar synthetic aper-tures are typically of the order of 1–2m, while therangeRo to target is of the order of tens of kilometers,this second assumption is quite reasonable. For thesame reasons we will also assume the target scene tobe nominally planar. Moreover, while the TX willmost likely be an untruncated, collimated (at the TXaperture) Gaussian beam we will not address the ef-fects of nonuniform scene illumination. We will onlyconsider the TX’s spherical phase front, with radiusof curvature Ro (assuming that the target range ismuch larger than TX beam’s Rayleigh range), as itilluminates the scene. We will also ignore all atmo-spheric effects and assume that the sampling re-quirements for either image plane or pupil planedetection are properly satisfied for efficient detectionof the band-limited signal [15,16].The geometry of the problem is depicted in Fig. 2.
Shown in this figure is a single TX located at ðxT ; yTÞin the aperture plane coordinate system. The TXilluminates the target f ðξ; ηÞ at range Ro, and the
returning complex field is collected by a single off-axis RX aperture, the location of which will not affectthe HAL transformation. Notice that the RX planecoordinates are given by variables ðxa; yaÞ, whilethe target plane coordinate variables are ðξ; ηÞ.
The field gsmðxa; yaÞ, where the subscript “sm” in-dicates the stripmap case, in the plane of the RXaperture is found through scalar diffraction theoryaccording to the relationship
gsm ¼C
�f ðξ; ηÞ exp
�j
πλRo
½ðξ� xTÞ2 þ ðη� yTÞ2��
⊗ hRoðξ; ηÞ
�; ð1Þ
where C is a complex constant, ⊗ representsconvolution, hRo
is the free-space impulse responsegiven by
hRo¼ exp
�j
πλRo
ðξ2 þ η2Þ�;
and where off-axis spherical wave illumination of thetarget has been assumed. Assuming for now thatf ðξ; ηÞ in Eq. (1) is a separable function, we can pro-ceed with the details of the derivation in only one di-mension. Expanding and simplifying Eq. (1) in onedimension then yields
gsmðxaÞ ¼CZ
∞
−∞
f ðξÞ exp�j
πλRo
ðξ − xTÞ2�
× exp�j
πλRo
ðxa − ξÞ2�dξ
¼ C exp�j
πλRo
x2a
�
× exp�j
πλRo
x2T
�Z∞
−∞
f ðξÞ
× exp�j2πλRo
ξ2�expð−jpξÞ dξ ð2Þ
¼ C exp�j
πλRo
x2a
�exp
�j
πλRo
x2T
�Fðxa þ xTÞ; ð3Þ
where Eq. (2) is recognized as a Fourier transformintegral with radian spatial frequency variable p gi-ven by
p ¼ 2πλRo
ðxa þ xTÞ ðrad=mÞ; ð4Þ
and where F in Eq. (3) is the Fourier transform off ðξÞ expðj2πξ2=λRoÞ. Ideally, however, our TX wouldbe located at xT ¼ 0, leading to a received fieldgoðxa; yaÞ given in one dimension asFig. 2. HAL transformation geometry.
1170 APPLIED OPTICS / Vol. 48, No. 6 / 20 February 2009

goðxaÞ ¼ C exp�j
πλRo
x2a
�FðxaÞ: ð5Þ
To then express go in terms of known or measuredquantities gsmðxaÞ and xT we first subtract xT from xain Eq. (3) and rearrange to yield
gsmðxa − xTÞ exp�−j
πλRo
x2T
�
¼ C exp�j
πλRo
ðxa − xTÞ2�
FðxaÞ: ð6Þ
Next we expand the quadratic phase term on theright-hand side of Eq. (6) and simplify to find
gsmðxa − xTÞ exp�−j
2πλRo
xTðxT − xaÞ�
¼ C exp�j
πλRo
x2a
�FðxaÞ ¼ goðxaÞ: ð7Þ
One further rearrangement of Eq. (7) then yields, intwo dimensions, the desired stripmap HAL transfor-mation expressed as
goðxa þ xT ; ya þ yTÞ ¼ gsmðxa; yaÞ
× exp�j2πλRo
½xaxT þ yayT ��: ð8Þ
We see from Eq. (8) that the stripmap HAL trans-formation is quite simple and involves only a linearphase correction applied to the detected pupil planefield, according to the location of the TX at the in-stant the field was received, and a repositioning ofthe phase corrected field segment. Moreover, it iseasy to verify that had the derivation of Eq. (8) beenperformed in two dimensions we would have ob-tained the same result even if we had not assumedthat f ðξ; ηÞ was separable.Notice that the stripmap HAL transformation is
complete and rigorous and involves no approxima-tions or assumptions other than those required forscalar diffraction theory to apply [17]. In particular,since no attempt was made to ignore or eliminate thevarious quadratic phase terms in Eq. (2), the HALtransformation expressed in Eq. (8) is valid for tar-gets both in the Fresnel and Fraunhoffer diffractionzones, or at least at any range Ro that is much great-er than the Rayleigh range, if the TX beam isGaussian.In addition, recall that in Fig. 2 the center of the
RX aperture was not specified. Implicit then inEq. (8) is the assumption that the received fieldgsmðxa; yaÞ will have nonzero value only over the phy-sical extent of the RX aperture. For example, if dur-ing one TX–RX event the RX aperture extends fromxa ¼ 0:2m to xa ¼ 0:3m, in the x dimension, whilethe TX is located at xT ¼ 0:25m (i.e., monostaticconditions), then, after the required linear phase
correction, the repositioned idealized field segmentwould extend from xa ¼ 0:45m to xa ¼ 0:55m.
A. Off-Axis Point Target Special Case
To demonstrate the application of the stripmap HALtransformation, consider now the 1D special case of atarget consisting of a single off-axis point scatterer.Only a single TX–RX cycle will be examined here,while the effects of collecting and correcting multiplesequentially collected field segments will be exam-ined more fully in the Subsection 2.B.
Inserting f ðξÞ ¼ δðξ − ξpÞ, where δ indicates theDirac δ function, into Eq. (2) yields
gp-smðxaÞ ¼ C exp�j
πλRo
ðx2a þ x2TÞ�
×Z
∞
−∞
δðξ − ξpÞ exp�j2πλRo
ξ2�expð−jpξÞdξ; ð9Þ
where the subscript p indicates the field received forthe point target case. After applying the sifting prop-erty of the Dirac delta function to Eq. (9), and thensubstituting Eq. (4) into the result and simplifying,we find the following phase-only result:
gp-smðxaÞ ¼C exp�j2πλRo
�x2a þ x2T
2
þ ξ2p − ðxa þ xTÞξp��
: ð10Þ
Similarly, by setting xT ¼ 0, we obtain the ideal fieldgiven by
gpoðxaÞ ¼ C exp�j2πλRo
�x2a2þ ξpðξp − xaÞ
��: ð11Þ
[Note that the result of Eq. (10) can be independentlyverified by using simple geometry to calculate theround-trip propagation distance DRT from the TX,to the target, and back to an arbitrary point in theRX aperture plane. The field gp-smðxaÞ will then beexpðj2πDRT=λÞ. After simplification the same resultas expressed in Eq. (10) will be obtained.]
As a specific example, we set ξp ¼ 0:25m and as-sume the TX is located at xT ¼ −0:25m. We will alsoassume bistatic ladar conditions and let the RX aper-ture extend from xa ¼ 0:25m to xa ¼ 0:45m. Further-more, we will assume that the range to target isRo ¼ 30km and that the TX wavelength is λ ¼1:5 μm. The results are shown in Fig. 3. Along thehorizontal axis of this figure the bold line segmentshows the location of the RX aperture, while theblack dot indicates the location of the TX. Similarly,the black dot on the upper border of the figure indi-cates the longitudinal cross-range location of thepoint target (assuming, of course, that the target isactually at the proper range Ro). The raw phase seg-ment in the upper right-hand portion of the figure,indicated by the circular data points, was then
20 February 2009 / Vol. 48, No. 6 / APPLIED OPTICS 1171

calculated by substituting the appropriate valuesinto Eq. (10). The ideal phase, shown by the solidblack curve, was determined by plotting Eq. (11) overan extended range of longitudinal cross-range va-lues, and the corrected phase segment, also indicatedby circular data points, shows the result of applyingthe stripmap HAL transformation to the raw phasevalues. We see very clearly from Fig. 3 that the strip-map HAL transformation precisely corrects for theeffects due to an off-center TX.
B. Longitudinal Cross-Range Stripmap HAL ImageResolution
Consider now the case wherein both a single trans-lating RX aperture and the TX are in motion. As inthe previous example we shall examine this problemin only one dimension and will begin by assuming asingle point target at a range of Ro ¼ 30km, with alongitudinal cross-range location of ξp ¼ 0:25m. Wewill also assume that the TX wavelength is λ ¼1:5 μm. In the following two examples, though, wewill assume we have a RX aperture with diameterDap ¼ 0:4m and will also assume monostatic condi-tions (i.e., the TX beam is centered on and exitsthrough the RX aperture). Moreover, in keeping withconventional SAR notation, we will assume that thesynthetic aperture diameter DSAR is defined by themotion of the TX [1]. In particular, in the two exam-ples to follow we will assume DSAR ¼ 0:8m, extend-ing from xa ¼ −0:4m to xa ¼ 0:4m.Figure 4 demonstrates the results of correcting
three sequentially collected phase segments cap-tured across the synthetic aperture. In this case eachshot is spaced by 0:4m from its nearest neighbors,effectively forcing the real RX aperture to be tangentto itself during consecutive TX–RX cycles. As inFig. 3, the black dots along the horizontal axis ofFig. 4 indicate the location of the TX during eachshot, while the black dot on the upper border of
the figure indicates the longitudinal cross-rangelocation of the point target. Each of the raw phasesegments were calculated by substituting appropri-ate values into Eq. (10). The ideal phase, shown bythe solid black curve, was again determined by plot-ting Eq. (11) over an extended range of longitudinalcross-range values, while each of the corrected phasesegments lying along the ideal phase curve representthe results of applying the stripmap HAL transfor-mation to the raw phase values shown with corre-sponding data point markers.
Notice in Fig. 4 that the phase segment shown withsquare data point markers, captured when xT ¼ 0,needs no correction. This is, of course, true in generalfor any pupil field captured when the TX is centeredon the RX aperture plane, since if both xT and yTequal zero, Eqs. (3) and (5) are identical. Notice alsofrom Fig. 4 that while the translating RX apertureeffectively covers the entire synthetic aperture withno gaps, the corrected synthetic field has uniformlyspaced gaps, each of which is Dap wide. These gaps inthe synthetic field would clearly have adverse effectson image resolution and would introduce periodic-grating-like diffraction artifacts in any image createdfrom the synthetic field as the number of cross-rangeshots increases.
In order to avoid this effect and optimally increasethe resolution of HAL images it is clear that addi-tional raw phase segments must be collected, eachof which must be spaced by no more than Dap=2.To demonstrate this requirement consider Fig. 5.This figure was created by using the same para-meters and conditions used to generate Fig. 4. How-ever, for Fig. 5 five sequential TX–RX cycles wereassumed, each of which was spaced by Dap=2 ¼0:2m. Again, the corrected phase segments lyingalong the ideal phase curve show the results of apply-ing the stripmap HAL transform to the raw phase
Fig. 3. Uncorrected and corrected point object phase segments.Here the stripmap HAL transformation has been applied to aphase-only field segment resulting from an off-axis point target.Both the TX and the RX aperture are also off-axis in this bistaticTX–RX example.
Fig. 4. Example of the stripmap HAL transformation applied tothree sequentially collected phase-only field segments resultingfrom an off-axis point target. In this case the RX aperture is effec-tively tangent to itself during each subsequent TX–RX cycle.Monostatic conditions apply.
1172 APPLIED OPTICS / Vol. 48, No. 6 / 20 February 2009

values shown with corresponding data point mar-kers. We clearly see that the synthetically recon-structed pupil plane field is now continuous.By further consideration of the results of Fig. 5, in
particular the width of the synthetic pupil planefield, we come to the remarkable general conclusionthat images created from synthetic pupil plane fieldsconstructed from raw stripmap field segments col-lected every Dap=2 will have resolutions inverselyproportional to an effective aperture diameter Deff -smgiven by
Deff -sm ¼ 2DSAR þDap: ð12Þ
In particular, in the virtual focal plane of Fig. 1, theimage resolution ΔCRVFP-sm would be, nominally,
ΔCRVFP-sm ¼ λf VDeff-sm
¼ λf V2DSAR þDap
; ð13Þ
where f V is the focal length assumed for the virtuallens of Fig. 1. Of probably greater interest is the long-itudinal cross-range resolution ΔCRsm achievable inthe target plane itself. This is found simply by divid-ing Eq. (13) by the absolute value of the virtual imageplane magnification jMj ¼ f V=Ro to yield
ΔCRsm ¼ λRo
2DSAR þDap: ð14Þ
Another way of interpreting the results of this sec-tion is to define an image sharpening ratio (ISR) thatquantifies the image resolution enhancement cap-abilities of the HAL technique. Simply, the stripmapimage sharpening ratio ISRsm is defined as the ratioof the single aperture cross-range resolution to themaximum stripmap HAL cross-range resolution andis given by
ISRsm ¼ 2DSAR þDap
Dap¼ 2DSAR
Dapþ 1: ð15Þ
In both Eqs. (14) and (15) we find that stripmapHAL imaging performance is enhanced by increasingthe synthetic aperture diameter DSAR. As with tradi-tional stripmap SAR and SAL techniques, however,the maximum value of DSAR is limited to the sizeof the illumination beam footprint in the targetplane. This is the case because target plane scat-terers at the leading edge of a scene will fully contri-bute to the HAL data set only if they are illuminatedduring every shot taken across the entire syntheticaperture [1].
Typically, in the stripmap case themaximum valueofDSAR is found by determining the full width at half-maximum (FWHM) diameter of the illuminationbeam’s intensity profile. As an example, consider thecase of a collimated and untruncated Gaussian TXbeam at wavelength λ. Based on well-known Gaus-sian beam propagation theory, it is quite easy to showthat the FWHM (intensity) beam diameter after pro-pagating a distance Ro corresponds to a maximumstripmap DSAR of
DSAR-max ≅ 1:2ωo
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ
�Roλπω2
o
�2
s; ð16Þ
where ωo is the TX beam waist and where, as withEq. (8), far-field conditions are not necessarily as-sumed [18].
Recall that under monostatic ladar conditionsthe TX beam is nominally untruncated if ωo ¼Dap=4 If we then assume realistic values ofDap ¼ 0:1m, λ ¼ 1:5 μm, and Ro ¼ 30km, we findthat DSAR-max ≅ 0:7m, ΔCRmin -sm ≅ 3:0 cm, andISRmax -sm ≅ 15. To achieve finer resolution or
Fig. 5. Example of the stripmap HAL transformation applied tofive sequentially collected phase-only segments resulting from anoff-axis point target. In this case the RX aperture effectively over-laps itself by half its diameter during each subsequent TX–RX cy-cle. Monostatic conditions apply.
Fig. 6. Example of the spotlight HAL transformation applied toseven sequentially collected phase-only segments resulting froman off-axis point target. In this case the RX aperture effectivelyoverlaps itself by two thirds of its diameter during each subse-quent TX–RX cycle. Monostatic conditions apply.
20 February 2009 / Vol. 48, No. 6 / APPLIED OPTICS 1173

greater image sharpening a larger synthetic aper-ture diameter could be achieved by increasing theTX beam divergence. This would, of course, probablycome at the expense of having to increase the TXbeam power if subimage signal-to-noise ratios areto be preserved.Although the results presented above are quite re-
markable, we should point out that they are not un-expected. In fact, the maximum achievable stripmapHAL image sharpening ratio, as well as the corre-sponding minimum sample spacing requirement,are essentially the same as for conventional strip-map SAR and SAL sensors where maximum rangeor cross-range images are desired [1].
3. Spotlight HAL Transformation
In this section we will develop the spotlight HALtransformation. This scenario involves the TXbeam’s always being directed, through use of a beamsteering device, toward the center of the scene of in-terest. As in the stripmap case we will assume thatthe target is flood illuminated by a single coherentTX beam for all shots across the synthetic apertureand that the scene remains unchanged over multiplelooks. We will also assume the target to be nominallyplanar and uniformly illuminated. As before, we willalso ignore all atmospheric effects.The geometry shown in Fig. 2 still applies to the
spotlight HAL case. However, the field gspðxa; yaÞ,where the subscript “sp” indicates the spotlight case,in the plane of the RX aperture is now expressed as
gsp ¼C
�f ðξ; ηÞ exp
�j
πλRo
½ðξ − xTÞ2 þ ðη − yTÞ2��
× exp�−j
2πλRo
½ξxT þ ηyT ��
⊗ hRoðξ; ηÞ
�; ð17Þ
where in contrast to Eq. (1) the second exponentialfactor represents the linear phase tilt resulting fromdirecting the TX beam toward the center of the targetscene. Note that all variables in Eq. (17), includingthe free-space impulse response hRo
, remain as theywere defined in Section 2.Assuming again that, for now, f ðξ; ηÞ in Eq. (17) is
separable, we can proceed with the details of thederivation in only one dimension. Expanding andsimplifying Eq. (17) in one dimension then yields
gspðxaÞ ¼ CZ
∞
�∞
f ðξÞ exp�j
πλRo
ðξ� xTÞ2�
× exp�−j
2πλRo
ξxT�exp
�j
πλRo
ðxa � ξÞ2�
dξ
¼ C exp�j
πλRo
x2a
�exp
�j
πλRo
x2T
�
×Z
∞
�∞
f ðξÞ exp�j2πλRo
ðξ2 − ξxTÞ�expð�jpξÞ dξ ð18Þ
¼ C exp�j
πλRo
x2a
�exp
�j
πλRo
x2T
�× ½Fðxa þ xTÞ ⊗ δðxa þ 2xTÞ� ð19Þ
¼ C exp�j
πλRo
x2a
�exp
�j
πλRo
x2T
�Fðxa þ 2xTÞ; ð20Þ
where once again Eq. (18) is recognized as a Fouriertransform integral with radian spatial frequencyvariable p given by Eq. (4), and where F in Eq. (19)is defined in the text following Eq. (4).
Noting that the ideal field (i.e., if xT ¼ 0) expressedin Eq. (5) still applies in the spotlight case, we canfind the spotlight HAL transformation by performingalgebraic manipulations involving Eqs. (5) and (20),similar to those detailed following Eq. (5) that lead toEq. (8). The result is the 2D spotlight HAL transformexpressed as
goðxa þ 2xT ; ya þ 2yTÞ ¼ gspðxa; yaÞ× expðj π
λRo½xTð4xa þ 3xTÞ þ yTð4ya þ 3yTÞ�Þ; ð21Þ
where we note that, as with Eq. (8), the 2D result ofEq. (21) can be readily derived even if f ðξ; ηÞ is notassumed separable.
As with Eq. (8), we see from Eq. (21) that the spot-light HAL transformation is simple and involves onlya linear phase correction applied to the detected pu-pil plane field, according to the location of the TX atthe instant the field was received, and a reposition-ing of the phase corrected field segment. Moreover,the spotlight HAL transformation is complete andrigorous and involves no approximations or assump-tions other than those required for scalar diffractiontheory to apply [17].
A. Longitudinal Cross-Range Spotlight HAL ImageResolution
The application of the spotlight HAL transformationin the single shot, off-axis point target scenariowould yield results generally analogous to those al-ready presented in Subsection 2.A. For this reasonwe shall move directly to a discussion of the longitu-dinal cross-range resolution potential of the spotlightHAL imaging technique, the results for which differsomewhat from the stripmap case.
As before, we begin by assuming a single off-axis point scatterer and examine the problem in onlyone dimension. Inserting f ðξÞ ¼ δðξ − ξpÞ into Eq. (18)and simplifying yields the following phase onlyresult:
gp-spðxaÞ ¼C exp�j2πλRo
�x2a þ x2T
2
þ ξ2p − ðxa þ 2xTÞξp��
: ð22Þ
1174 APPLIED OPTICS / Vol. 48, No. 6 / 20 February 2009

Notice that the only difference between Eqs. (10) and(22) is the factor of 2 multiplying the second occur-rence of xT in Eq. (22). Also notice that the ideal fieldin the spotlight case, obtained by setting xT ¼ 0 inEq. (22), is identical to that given in Eq. (11).As in Subsection 2.B we will examine the case
wherein both a single translating RX aperture andthe TX are in motion in a monostatic configuration.As before we assume a single point target at a rangeof Ro ¼ 30km with a longitudinal cross-range loca-tion of ξp ¼ 0:25m. We will also assume that theTX wavelength is λ ¼ 1:5 μm, that Dap ¼ 0:4m, andthat the synthetic aperture diameter (defined by themotion of the TX) is DSAR ¼ 0:8m, extending fromxa ¼ −0:4m to xa ¼ 0:4m.Figure 6 demonstrates the results of correcting se-
ven sequentially collected phase segments capturedacross the synthetic aperture. In this case each shothas been spaced by Dap=3 from its nearest neighbors.As in Figs. 3–5 the black dots along the horizontalaxis indicate the location of the TX during each shot,while the black dot on the upper border of the figureindicates the longitudinal cross-range location of thepoint target. Each of the raw phase segments werecalculated by substituting appropriate values intoEq. (22). The ideal phase, shown by the solid blackcurve, was then determined by plotting Eq. (11) overan extended range of longitudinal cross-range va-lues, while each of the corrected phase segments ly-ing along the ideal phase curve represent the resultsof applying the spotlight HAL transformation to theraw phase values shown with corresponding datapoint markers. We see in this case that the synthe-tically reconstructed pupil plane field is continuous,thereby optimizing the resolution of spotlight HALimages, if field segments are collected at spacingsno greater than Dap=3.As in the stripmap case, further consideration of
the results of Fig. 6, in particular the width of thesynthetic pupil plane field, reveals that spotlightHAL images created from field segments collectedevery Dap=3 will have resolutions inversely propor-tional to an effective aperture diameter Deff-spgiven by
Deff-sp ¼ 3DSAR þDap: ð23Þ
Moreover, the potential longitudinal cross-range tar-get plane resolution ΔCRsp will be
ΔCRsp ¼ λRo
Deff-sp¼ λRo
3DSAR þDap; ð24Þ
while the longitudinal cross-range spotlight imagesharpening ratio ISRsp is given by
ISRsp ¼ 3DSAR þDap
Dap¼ 3DSAR
Dapþ 1: ð25Þ
For instance, consider the parameters from the ex-ample at the end of Subsection 2.B. Here we assumedan untruncated Gaussian TX beam, Dap ¼ 0:1m,λ ¼ 1:5 μm, and Ro ¼ 30km. If we also assume thatDSAR ¼ 0:7m, from Eqs. (24) and (25) we then findΔCRsp ≅ 2:0 cm, and ISRsp ≅ 22, each parameterproviding a noticeable improvement over the strip-map case.
However, in the spotlight case the maximum valueof DSAR is no longer limited to the size of the illumi-nation beam footprint in the target plane. Instead,DSAR is limited only by the ability to accurately pointthe TX beam toward the center of the target scene asthe sensor platform moves, therefore potentiallyallowing for unlimited resolution increases. Thetrade-off is that while a stripmap sensor will allowa continuous target scene strip, of potentially unlim-ited length, to be imaged with resolution fixed ac-cording to Eqs. (13)–(16), the spotlight HAL caseallows images of potentially unlimited resolutionto be formed over a finite and fixed region of interest,limited in size to the diameter of the TX beam in thetarget plane [1].
Before moving on to our discussion of HAL rangesensitivity, we call attention to the fact that the dra-matic resolution enhancements available throughSAR, SAL, and HAL imaging techniques are a directconsequence of additional phase accumulations inthe pupil plane resulting from the synchronous mo-tion of both the RX aperture and the TX. For exam-ple, if the TX were by some means held stationary atðxT ; yTÞ ¼ ð0; 0Þ while the RX aperture flew past,then the HAL transformations of Eqs. (8) and (21)would reduce simply to goðxa; yaÞ ¼ gðxa; yaÞ. In thiscase each of the field segments collected across thesynthetic aperture would be positioned at the samelocation from which they were collected when thecomposite pupil plane field is synthesized. Regard-less of spatial sampling, then, the synthetic pupilplane field constructed after collecting data frommultiple cross-range shots would extend only overa distance Deff ¼ DSAR þDap. As a result, all the fac-tors of 2 in Eqs. (12)–(15), as well as the factors of 3 inEqs. (23)–(25), would drop out and the potential im-age sharpening would be correspondingly poorer.
4. Range Sensitivity
We will now examine how the HAL techniques areaffected by errors in the estimated range to target.For an assumed planar target we will begin by com-paring the stripmap HAL transformation for rangeRo þΔRsm to that at range Ro, where Ro þΔRsm isthe true target range, Ro is now taken to be the es-timated target range, and ΔRsm is the range error.As the field gsmðxa; yaÞ at the RX aperture will remainunchanged regardless of the range estimate, only thephase correction term of Eq. (8) is of interest. Thephase correction errorΔϕsm resulting from assuminga range of Ro when the target is actually at rangeRo þΔRsm is then
20 February 2009 / Vol. 48, No. 6 / APPLIED OPTICS 1175

Δϕsm ¼ 2πλ ðxaxT þ yayTÞ
�1Ro
−1
Ro þΔRsm
�
≅ 2πðxaxT þ yayTÞ�ΔRsm
λR2o
�; ð26Þ
where we have assumed that Ro ≫ ΔRsm.Assuming that the phase error of Eq. (26) can be
considered negligible if it is less than or equal toone tenth of a wave, we then find the constrainton range error to be
ΔRsm ≤0:1λR2
o
ðxaxT þ yayTÞ����max
: ð27Þ
For example, using the parameters from our exam-ples above, if we set λ ¼ 1:5 μm and Ro ¼ 30km,and if we assume that for a monostatic system bothxa and xT each have maximum values on the order of1m, we find that for yT ¼ 0 we can ignore all phasecorrection errors if ΔRsm ≤ 135m.The implication of this result is that the stripmap
HAL transformation is not strongly dependant onthe range estimate Ro. This is good in that any rea-sonable estimate of Ro will likely suffice. However, italso means that the stripmap HAL transformationalone will not allow us to access scene depth informa-tion or create 3D images: recall that range is encodedin phase, so that phase insensitivity equates to rangeinsensitivity.By comparison, the spotlight HAL transformation
is a bit more sensitive to range errors. For this casethe constraint on range error corresponding toEq. (27) is
ΔRsp ≤0:1λR2
o
ðxTð2xa þ 1:5xTÞ þ yTð2ya þ 1:5yTÞÞ����max
:
ð28ÞStrictly speaking, since the synthetic aperture in thespotlight case may become arbitrarily large, xT andyT may also be large, thereby requiring ΔRsp to bevery small. As a matter of practical fact, however, be-cause of the difficulties in maintaining accuratepointing over large synthetic apertures, xa, xT , ya,and yT will likely have maximum values of the orderof a meter in both the stripmap and spotlight HALcases. For example, assuming a monostatic sensor,if we set λ ¼ 1:5 μm, Ro ¼ 30km, xa ¼ xT ¼ 1m andyT ¼ 0, we find that we can achieve a phase errorof less than 0.1 waves if the range estimation errorΔRsp is less than about 39m.
5. Conclusions
We have developed the theoretical basis for two intri-guing new techniques for creating high-resolutiontwo-dimensional cross-range (i.e., angle–angle) ladarimages. Holographic aperture ladar (HAL) is an
evolutionary variant of synthetic aperture ladar(SAL) that makes use of a translating imaging sensorrather than a translating single point detector. Whilewe do not claim that traditional holographic methodsmust necessarily be employed, or are even required,we have come to call this area of research “holo-graphic aperture ladar” because of the general expec-tation that individual pupil plane complex fieldsegments will be digitally reconstructed from oneor more 2D interferograms recorded in either the pu-pil or image planes. In fact, our analysis leading tothe development of the HAL transformations beginswith the assumption that we have access to a collec-tion of pupil plane field segments, without regard forhow they were obtained.
After a sequence of pupil plane field segments iscollected across the synthetic aperture, they arereadily assembled into a composite, synthetic pupilplane field through use of one of the HAL transfor-mations. Both the stripmap and spotlight HALtransformations are quite simple, rigorous, largelyinsensitive to range estimation errors, and valid inboth the Fresnel and Fraunhoffer diffraction zones.After the synthetic pupil field is Fourier transformedinto an effective image plane, a high-resolution im-age can be produced in the longitudinal cross-rangedimension. Of particular significance is the fact that,owing to synchronous translation of both the TX andthe RX aperture, resolution enhancements of morethan twice (stripmap case) or three times (spotlightcase) the ratio of the synthetic aperture to the realRX aperture diameter can be realized. While the re-sults we present are general, we have demonstratedvia single point scatterer examples that optimum re-solution enhancements are achievable when theshots are taken at uniform spacings equal to or lessthan half (stripmap case) or one third (spotlight case)of the real RX aperture diameter.
Future work will first focus on experimental veri-fication of the predictions described herein. We willalso be examining and developing methods for adap-tively mitigating, the effects of nonideal aperturemotions and residual piston phase errors. As seenin Figs. 5 and 6, the HAL transformations preciselyaccount for deterministic piston phase differencesbetween the multiple pupil plane field samples. How-ever, the HAL transforms themselves do not correctfor residual piston errors or field segment misregis-tration errors that are due in part to platform vibra-tions and atmospheric effects. Oversampling of thepupil plane field, followed by correction via thespeckle field correlation techniques described byBinet et al. will likely prove to be very beneficialin this area [9].
Methods for extracting range and scene depth in-formation from the synthetic pupil plane field by in-troducing additional system variability will also be atopic of focused future effort.
This effort was supported in part by U.S. Air Forceand Optimetrics, Inc., of Dayton, OH, throughcontract number FA8650-04-D-1712, and by the
1176 APPLIED OPTICS / Vol. 48, No. 6 / 20 February 2009

Provost’s Office at the University of Dayton.B. D. Duncan especially acknowledges the gracioussupport of the U.S. Air Force AFRL/RYJM EO Com-bat ID Branch for hosting his sabbatical leave re-search activities during calendar year 2007. Theviews expressed in this article are those of theauthors and do not reflect on the official policy ofthe Air Force, Department of Defense or the U.S.Government.
References1. M. A. Richards, Fundamentals of Radar Signal Processing
(McGraw-Hill, 2005), Chap. 8.2. M. Soumekh, Synthetic Aperture Radar Signal Processing
(Wiley, 1999).3. N. Levanon and E. Mozeson, Radar Signals (Wiley, 2004).4. D. Park, “Performance analysis of optical synthetic aperture
radars,” Proc. SPIE 999, 100–116 (1988).5. T. G. Kyle, “High resolution laser imaging system,” Appl. Opt.
28, 2651–2656 (1989).6. T. J. Green, Jr., S. Marcus, and B. D. Colella, “Synthetic-
aperture-radar imaging with a solid-state laser,” Appl. Opt.34, 6941–6949 (1995).
7. S. M. Beck, J. R. Buck, W. F. Buell, R. P. Dickinson,D. A. Kozlowski, N. J. Marechal, and T. J. Wright, “Synthetic-aperture imaging laser radar: laboratory demonstration andsignal processing,” Appl. Opt. 44, 7621–7629 (2005).
8. J. C. Marron and R. L. Kendrick, “Distributed aperture activeimaging,” Proc. SPIE 6550, 65500A (2007).
9. R. Binet, J. Colineau, and J.-C. Lehureau, “Short-range syn-thetic aperture imaging at 633nm by digital holography,”Appl. Opt. 41, 4775–4782 (2002).
10. J.-C. Lehureau and J. Colineau, “Optical synthetic apertureimagery,” Proc. SPIE 5816, 54–65 (2005).
11. T. M. Kreis, M. Adams, andW. P.O. Jueptner, “Aperture synth-esis in digital holography,” Proc. SPIE 4777, 69–76 (2002)
12. J. C. Marron and K. S. Schroeder, “Holographic laser radar,”Opt. Lett. 18, 385–387 (1993).
13. J. C. Marron, R. L. Kendrick, T. A. Hoft, and N. Seldomridge,“Novel multi-aperture 3D imaging systems,” presented at14th Coherent Laser Radar Conference, Snowmass, Colo.,8–13 July 2007.
14. J. E. Mason, K. A. Anderson, R. L. Kendrick, T. S. Kubo, J. C.Maron, and T. Zhao, “Experiments with multi-aperture three-dimensional coherent imaging,” presented at 14th CoherentLaser Radar Conference, Snowmass, Colo., 8–13 July 2007.
15. J. H. Shapiro, “Heterodyne mixing efficiency for detectorarrays,” Appl. Opt. 26 3600–3606 (1987).
16. A. Stern and B. Javidi, “General sampling theorem and appli-cation in digital holography,” Proc. SPIE 5557, 110–123(2004).
17. J. W. Goodman, Introduction to Fourier Optics, 3rd ed.(Roberts, 2005), Chaps. 3 and 4.
18. A. E. Siegman, Lasers (University Science Books, 1986),Chap. 17.
20 February 2009 / Vol. 48, No. 6 / APPLIED OPTICS 1177