Embed Size (px)
DESCRIPTION
These are the first 4 chapters off the book. Hope it helps , it can be useful for engineering students and other physics enthusiasts.
Citation preview

1 Simple
HarmonicMotion
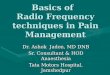
AtfirstsighttheeightphysicalsystemsinFigure1.1appeartohavelittleincommon.
1.1(a)isasimplependulum,amassmswingingattheendofalightrigidrodoflengthl.
1.1(b)isaflatdiscsupportedbyarigidwirethroughitscentreandoscillatingthrough
smallanglesintheplaneofitscircumference.
1.1(c)isamassfixedtoawallviaaspringofstiffnesssslidingtoandfrointhex
directiononafrictionlessplane.
1.1(d)isamassmatthecentreofalightstringoflength2lfixedatbothendsundera
constanttensionT.Themassvibratesintheplaneofthepaper.
1.1(e)isafrictionlessU-tubeofconstantcross-sectionalareacontainingalengthlof
liquid,density
,oscillatingaboutitsequilibriumpositionofequallevelsineach
limb.
1.1(f)isanopenflaskofvolumeVandaneckoflengthlandconstantcross-sectional
areaAinwhichtheairofdensity
vibratesassoundpassesacrosstheneck.
1.1(g)isahydrometer,abodyofmassmfloatinginaliquidofdensity
withaneckof
constantcross-sectionalareacuttingtheliquidsurface.Whendepressedslightly
fromitsequilibriumpositionitperformssmallverticaloscillations.
1.1(h)isanelectricalcircuit,aninductanceLconnectedacrossacapacitanceCcarrying
achargeq.
Allofthesesystemsaresimpleharmonicoscillatorswhich,whenslightlydisturbedfrom
theirequilibriumorrestpostion,willoscillatewithsimpleharmonicmotion.Thisisthe
mostfundamentalvibrationofasingleparticleorone-dimensionalsystem.Asmall
displacementxfromitsequilibriumpositionsetsuparestoringforcewhichisproportional
toxactinginadirectiontowardstheequilibriumposition.
Thus,thisrestoringforceFmaybewritten
F¼!sx
wheres,theconstantofproportionality,iscalledthestiffnessandthenegativesignshows
thattheforceisactingagainstthedirectionofincreasingdisplacementandbacktowards
ThePhysicsofVibrationsandWaves,6thEdition
H.J.Pain
#2005JohnWiley&Sons,Ltd
1
(a)
(b)
c
Ix
l
θ
m
mx +
mg = 0
x l
ml + m
g = 0
..
.. ω2 =
g/ l
mg s
in ∼ m
g
~ m
gx l
~~
mg
I + c
=
0..
ω2 =
c l
θ θ
θ θ
θ θ
θ
m
x
s
(c)
(d)
x
m
TT
2 l
mx +
sx =
0
ω2 =
s/m
mx +
2T =
0x l
ω2 =
2 T
l m
. .
. .
2x
x
x
x
pp
AV
l
(f)
(e)
p lx +
2 p
g x
= 0
..
ω2 =
2g/l
p A
lx +
γ pxA
2
v= 0
ω2 =
γ p
Al pV
..
2SimpleHarmonicMotion

theequilibriumposition.Aconstantvalueofthestiffnessrestrictsthedisplacementxto
smallvalues(thisisHooke’sLaw
ofElasticity).Thestiffnesssisobviouslytherestoring
forceperunitdistance(ordisplacement)andhasthedimensions
force
distance"MLT!2
L
Theequationofmotionofsuchadisturbedsystem
isgivenbythedynamicbalance
betweentheforcesactingonthesystem,whichbyNewton’sLaw
is
masstimesacceleration¼restoringforce
or
m€ xx¼!sx
wheretheacceleration
€ xx¼d2x
dt2
Thisgives
m€ xxþsx¼0
c
q
L
x
A
m
p
(h)
(g)
mx
+ A
pgx =
0..
ω2
= A
pg/m
Lq
+q c
= 0
..
ω2 =
1 Lc
Figure1.1
Simple
harmonic
oscillators
withtheireq
uationsofmotionan
dan
gularfreq
uen
cies
!of
oscillation.(a)A
simple
pen
dulum.(b)A
torsional
pen
dulum.(c)A
massonafrictionless
plane
connectedbyaspringto
awall.(d)Amassat
thecentreofastringunde
rco
nstan
ttensionT.
(e)A
fixedlength
ofnon-visco
usliquid
inaU-tubeofco
nstan
tcross-section.(f)Anacoustic
Helmholtz
resonator.(g)Ahyd
rometer
massm
inaliquid
ofden
sity
.(h)Anelectrical
LCresonan
tcircuit
SimpleHarmonicMotion
3
or
€ xxþs mx¼0
wherethedimensionsof
s mareMLT!2
ML
¼T!2¼
"2
HereTisatime,orperiodofoscillation,thereciprocalof"whichisthefrequencywith
whichthesystem
oscillates.
However,whenwesolvetheequationofmotionweshallfindthatthebehaviourofx
withtimehasasinusoidalorcosinusoidaldependence,anditwillprovemoreappropriate
toconsider,not",buttheangularfrequency
!¼2#"sothattheperiod
T¼1 "¼2#
ffiffiffiffi
m s
r
wheres=misnowwrittenas
!2.Thustheequationofsimpleharmonicmotion
€ xxþs mx¼0
becomes
€ xxþ!2x¼0
ð1:1Þ
(Problem
1.1)
Displacementin
Simple
HarmonicMotion
Thebehaviourofasimpleharmonicoscillatorisexpressedintermsofitsdisplacementx
fromequilibrium,itsvelocity
_ xx,anditsacceleration€ xxatanygiventime.Ifwetrythesolution
x¼Acos!t
whereAisaconstantwiththesamedimensionsasx,weshallfindthatitsatisfiesthe
equationofmotion
€ xxþ!2x¼0
for
_ xx¼!A!sin!t
and
€ xx¼!A!2cos!t¼!!2x
4SimpleHarmonicMotion

Anothersolution
x¼Bsin!t
isequallyvalid,whereBhasthesamedimensionsasA,forthen
_ xx¼B!cos!t
and
€ xx¼!B!2sin!t¼!!2x
Thecompleteorgeneralsolutionofequation(1.1)isgiven
bytheadditionor
superpositionofbothvaluesforxsowehave
x¼Acos!tþBsin!t
ð1:2Þ
with
€ xx¼!!2ðAcos!tþBsin!tÞ¼!!2x
whereAandBaredeterminedbythevaluesofxand_ xxataspecifiedtime.Ifwerewritethe
constantsas
A¼asin&
and
B¼acos&
where&isaconstantangle,then
A2þB2¼a2ðsin2&þcos2&Þ¼
a2
sothat
a¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
A2þB2
p
and
x¼asin&cos!tþacos&sin!t
¼asinð!tþ&Þ
Themaximumvalueofsin(!tþ&)isunitysotheconstantaisthemaximumvalueofx,
knownastheamplitudeofdisplacement.Thelimitingvaluesofsinð!tþ&Þare&1sothe
system
willoscillatebetweenthevaluesofx¼&aandweshallseethatthemagnitudeofa
isdeterminedbythetotalenergyoftheoscillator.
Theangle
&iscalledthe‘phaseconstant’forthefollowingreason.Simpleharmonic
motionisoftenintroducedbyreferenceto‘circularmotion’becauseeachpossiblevalueof
thedisplacementxcanberepresentedbytheprojectionofaradiusvectorofconstant
lengthaonthediameterofthecircletracedbythetipofthevectorasitrotatesinapositive
DisplacementinSimpleHarmonicMotion
5
anticlockwisedirectionwithaconstantangularvelocity
!.Eachrotation,astheradius
vectorsweepsthroughaphaseangleof2#rad,thereforecorrespondstoacomplete
vibrationoftheoscillator.Inthesolution
x¼asinð!tþ&Þ
thephaseconstant&,measuredinradians,definesthepositioninthecycleofoscillationat
thetimet¼0,sothatthepositioninthecyclefromwhichtheoscillatorstartedtomoveis
x¼asin&
Thesolution
x¼asin!t
definesthedisplacementonlyofthatsystem
whichstartsfromtheoriginx¼0attime
t¼0buttheinclusionof&inthesolution
x¼asinð!tþ&Þ
where&maytakeallvaluesbetweenzeroand2#allowsthemotiontobedefinedfromany
startingpointinthecycle.ThisisillustratedinFigure1.2forvariousvaluesof&.
(Problems1.2,1.3,1.4,1.5)
Velocity
andAccelerationin
Simple
HarmonicMotion
Thevaluesofthevelocityandaccelerationinsimpleharmonicmotionfor
x¼asinð!tþ&Þ
aregivenby
dx dt¼
_ xx¼a!cosð!tþ&Þ
φ4φ3
φ2
φ1
φ1
φ2
φ3
φ4
φ5
φ6
φ0 φ
6
φ5
= 2
70°
= 9
0° = 0 a
a
ωt
φx = a
Sin
(ωt + )
Figure
1.2
Sinusoidal
displacemen
tofsimple
harmonic
oscillatorwithtime,
showingvariationof
startingpointin
cyclein
term
sofphasean
gle
&
6SimpleHarmonicMotion

and
d2x
dt2¼
€ xx¼!a!2sinð!tþ&Þ
Themaximumvalueofthevelocitya!iscalled
thevelocityamplitudeandthe
accelerationamplitudeisgivenbya!2.
FromFigure1.2weseethatapositivephaseangleof#=2radconvertsasineintoa
cosinecurve.Thusthevelocity
_ xx¼a!cosð!tþ&Þ
leadsthedisplacement
x¼asinð!tþ&Þ
byaphaseangleof#=2radanditsmaximaandminimaarealwaysaquarterofacycle
aheadofthoseofthedisplacement;thevelocityisamaximumwhenthedisplacementis
zeroandiszeroatmaximumdisplacement.Theaccelerationis‘anti-phase’(#rad)with
respecttothedisplacement,beingmaximumpositivewhenthedisplacementismaximum
negativeandviceversa.ThesefeaturesareshowninFigure1.3.
Often,therelativedisplacementormotionbetweentwooscillatorshavingthesame
frequencyandamplitudemaybeconsideredintermsoftheirphasedifference
&1!&2
whichcanhaveanyvaluebecauseonesystem
mayhavestartedseveralcyclesbeforethe
otherandeachcompletecycleofvibrationrepresentsachangeinthephaseangleof
&¼2#.Whenthemotionsofthetwosystemsarediametricallyopposed;thatis,onehas
x =
a s
in(ω
t + )
x =
aω
cos(ω
t + )
ωt
ωt
ωt
x =
−aω
2 s
in(ω
t + )
aω
2
aωa
Acceleration xVelocity xDisplacement x
φ
φ
φ
Figure
1.3
Variation
with
time
ofdisplacemen
t,velocity
and
acceleration
insimple
harmonic
motion.Displacemen
tlagsvelocity
by#=2
radan
dis#radoutofphasewiththeacceleration.Th
e
initialphaseco
nstan
t&
istakenas
zero
VelocityandAccelerationinSimpleHarmonicMotion
7
x¼þawhilsttheotherisatx¼!a,thesystemsare‘anti-phase’andthetotalphase
difference
&1!&2¼n#rad
wherenisanoddinteger.Identicalsystems‘inphase’have
&1!&2¼2n#rad
wherenisanyinteger.Theyhaveexactlyequalvaluesofdisplacement,velocityand
accelerationatanyinstant.
(Problems1.6,1.7,1.8,1.9)
Non
-linea
rity
Ifthestiffnesssisconstant,thentherestoringforceF¼!sx,whenplottedversusx,will
produceastraightlineandthesystem
issaidtobelinear.Thedisplacementofalinear
simpleharmonicmotionsystem
followsasineorcosinebehaviour.Non-linearityresults
whenthestiffnesssisnotconstantbutvarieswithdisplacementx(seethebeginningof
Chapter14).
Energy
ofaSimple
HarmonicOscillator
Thefactthatthevelocityiszeroatmaximumdisplacementinsimpleharmonicmotionand
isamaximumatzerodisplacementillustratestheimportantconceptofan
exchange
betweenkineticandpotentialenergy.Inanidealcasethetotalenergyremainsconstantbut
thisisneverrealizedinpractice.Ifnoenergyisdissipatedthenallthepotentialenergy
becomeskineticenergyandviceversa,sothatthevaluesof(a)thetotalenergyatanytime,
(b)themaximumpotentialenergyand(c)themaximumkineticenergywillallbeequal;
thatis
Etotal¼KEþPE¼KEmax¼PEmax
Thesolutionx¼asin(!tþ&)impliesthatthetotalenergyremainsconstantbecausethe
amplitudeofdisplacementx¼&aisregainedeveryhalfcycleatthepositionofmaximum
potentialenergy;whenenergyislosttheamplitudegraduallydecaysasweshallseelaterin
Chapter2.Thepotentialenergyisfoundbysummingallthesmallelementsofworksx.dx
(forcesxtimesdistancedx)donebythesystemagainsttherestoringforceovertherange
zerotoxwherex¼0giveszeropotentialenergy.
Thusthepotentialenergy¼
ð
x 0
sx'dx¼
1 2sx2
Thekineticenergyisgivenby1 2m_ xx2sothatthetotalenergy
E¼
1 2m_ xx2þ1 2sx2
8SimpleHarmonicMotion

SinceEisconstantwehave
dE dt¼ðm
€ xxþsxÞ_ xx¼0
givingagaintheequationofmotion
m€ xxþsx¼0
Themaximumpotentialenergyoccursatx¼&aandistherefore
PEmax¼
1 2sa2
Themaximumkineticenergyis
KEmax¼ð1 2m_ xx2Þ m
ax¼
1 2ma2!2½cos2ð!tþ&Þ) m
ax
¼1 2ma2!2
whenthecosinefactorisunity.
Butm!2¼ssothemaximumvaluesofthepotentialandkineticenergiesareequal,
showingthattheenergyexchangeiscomplete.
Thetotalenergyatanyinstantoftimeorvalueofxis
E¼
1 2m_ xx2þ1 2sx2
¼1 2ma2!2½cos2ð!tþ&Þþ
sin2ð!tþ&Þ)
¼1 2ma2!2
¼1 2sa2
asweshouldexpect.
Figure1.4showsthedistributionofenergyversusdisplacementforsimpleharmonic
motion.Notethatthepotentialenergycurve
PE¼
1 2sx2¼
1 2ma2!2sin2ð!tþ&Þ
isparabolicwithrespecttoxandissymmetricaboutx¼0,sothatenergyisstoredinthe
oscillatorbothwhenxispositiveandwhenitisnegative,e.g.aspringstoresenergy
whethercompressedorextended,asdoesagasincompressionorrarefaction.Thekinetic
energycurve
KE¼
1 2m_ xx2¼
1 2ma2!2cos2ð!tþ&Þ
isparabolicwithrespecttobothxand_ xx.Theinversionofonecurvewithrespecttothe
otherdisplaysthe#=2phasedifferencebetweenthedisplacement(relatedtothepotential
energy)andthevelocity(relatedtothekineticenergy).
Foranyvalueofthedisplacementxthesumoftheordinatesofbothcurvesequalsthe
totalconstantenergyE.
EnergyofaSimpleHarmonicOscillator
9
(Problems1.10,1.11,1.12)
Simple
HarmonicOscillationsin
anElectricalSystem
Sofarwehavediscussedthesimpleharmonicmotionofthemechanicalandfluidsystems
ofFigure1.1,chieflyintermsoftheinertialmassstretchingtheweightlessspringof
stiffnesss.Thestiffnesssofaspringdefinesthedifficultyofstretching;thereciprocalof
thestiffness,thecomplianceC(wheres¼1=C)definestheeasewithwhichthespringis
stretched
andpotentialenergystored.ThisnotationofcomplianceCisusefulwhen
discussingthesimpleharmonicoscillationsoftheelectricalcircuitofFigure1.1(h)and
Figure1.5,whereaninductanceLisconnectedacrosstheplatesofacapacitanceC.The
forceequationofthemechanicalandfluidexamplesnowbecomesthevoltageequation
Energy
Tota
l energ
y E
= K
E +
PE
E
E 2
E 2
1 2K
E =
m
x 2
1 2= E
− sx
2
1 2P
E =
sx
2
−a
a 2−
a 2
+a
x
Dis
pla
cem
ent
Figure
1.4
Parabolicrepresentation
ofpotential
energyan
dkinetic
energyofsimple
harmonic
motionversusdisplacemen
t.Inversionofonecu
rvewithrespectto
theother
showsa90*phase
difference.Atan
ydisplacemen
tvalue
the
sum
ofthe
ordinates
ofthe
curves
equalsthe
total
constan
ten
ergyE
I+
+
−
−q c
Lq +
q c= 0
LdI
dt
Figure
1.5
Electrical
system
whichoscillatessimple
harmonically.Th
esum
ofthevo
ltag
esaround
thecircuit
isgiven
byKirch
hoff’slaw
asLdI=
dtþ
q=C¼
0
10
SimpleHarmonicMotion

(balanceofvoltages)oftheelectricalcircuit,buttheformandsolutionoftheequationsand
theoscillatorybehaviourofthesystemsareidentical.
Intheabsenceofresistancetheenergyoftheelectricalsystem
remainsconstantandis
exchangedbetweenthemagneticfieldenergystoredintheinductanceandtheelectricfield
energystoredbetweentheplatesofthecapacitance.Atanyinstant,thevoltageacrossthe
inductanceis
V¼!LdI
dt¼!Ld2q
dt2
whereIisthecurrentflowingandqisthechargeonthecapacitor,thenegativesign
showingthatthevoltageopposestheincreaseofcurrent.Thisequalsthevoltageq=C
acrossthecapacitancesothat
L€ qqþq=C¼0
ðKirchhoff’sLawÞ
or
€ qqþ!2q¼0
where
!2¼1 LC
Theenergystoredinthemagneticfieldorinductivepartofthecircuitthroughoutthe
cycle,asthecurrentincreasesfrom0toI,isformedbyintegratingthepoweratanyinstant
withrespecttotime;thatis
EL¼
ð
VI'dt
(whereVisthemagnitudeofthevoltageacrosstheinductance).
So
EL¼
ð
VIdt¼
ð
LdI
dtIdt¼
ð
I 0
LIdI
¼1 2LI2¼
1 2L_ qq2
Thepotentialenergystoredmechanicallybythespringisnowstoredelectrostaticallyby
thecapacitanceandequals
1 2CV2¼q2
2C
SimpleHarmonicOscillationsinanElectricalSystem
11
Comparisonbetweentheequationsforthemechanicalandelectricaloscillators
mechanical(force)!m€ xxþsx¼0
electrical(voltage)!L€ qqþq C¼0
mechanical(energy)!
1 2m_ xx2þ1 2sx2¼E
electrical(energy)!1 2L_ qq2þ1 2
q2
C¼E
showsthatmagneticfieldinertia(definedbytheinductanceL)controlstherateofchange
ofcurrentforagivenvoltageinacircuitinexactlythesamewayastheinertialmass
controlsthechangeofvelocityforagivenforce.Magneticinertialorinductivebehaviour
arisesfromthetendencyofthemagneticfluxthreadingacircuittoremainconstantand
reactiontoanychangeinitsvaluegeneratesavoltageandhenceacurrentwhichflowsto
opposethechangeofflux.ThisisthephysicalbasisofFleming’sright-handrule.
SuperpositionofTwoSimple
HarmonicVibrationsin
One
Dimension
(1)Vibration
sHav
ingEq
ual
Freq
uen
cies
Inthefollowingchaptersweshallmeetphysicalsituationswhichinvolvethesuperposition
oftwoormoresimpleharmonicvibrationsonthesamesystem.
Wehavealreadyseen
howthedisplacementinsimpleharmonicmotionmay
be
representedinmagnitudeandphasebyaconstantlengthvectorrotatinginthepositive
(anticlockwise)sensewithaconstantangularvelocity
!.Tofindtheresultingmotionofa
system
whichmovesinthexdirectionunderthesimultaneouseffectoftwosimple
harmonicoscillationsofequalangularfrequenciesbutofdifferentamplitudesandphases,
wecanrepresenteachsimpleharmonicmotionbyitsappropriatevectorandcarryouta
vectoraddition.
Ifthedisplacementofthefirstmotionisgivenby
x1¼a1cosð!tþ&1Þ
andthatofthesecondby
x2¼a2cosð!tþ&2Þ
thenFigure1.6showsthattheresultingdisplacementamplitudeRisgivenby
R2¼ða1þa2cos'Þ2þða2sin'Þ2
¼a2 1þa2 2þ2a1a2cos'
where'¼
&2!&1isconstant.
12
SimpleHarmonicMotion

Thephaseconstant(ofRisgivenby
tan(¼a1sin&1þa2sin&2
a1cos&1þa2cos&2
sotheresultingsimpleharmonicmotionhasadisplacement
x¼Rcosð!tþ(Þ
anoscillationofthesamefrequency
!buthavinganamplitudeRandaphaseconstant(.
(Problem
1.13)
(2)Vibration
sHav
ingDifferentFreq
uen
cies
Supposewenowconsiderwhathappenswhentwovibrationsofequalamplitudesbut
differentfrequenciesaresuperposed.Ifweexpressthem
as
x1¼asin!1t
and
x2¼asin!2t
where
!2>
!1
y
x
a2
a1
Ra
2
2
a2 s
in δ
a2 c
os δ
2 − 1 = δ
φθ
φφ
f1
Figure
1.6
Addition
ofvectors,ea
chrepresenting
simple
harmonic
motion
along
the
xaxis
at
angularfreq
uen
cy!to
givearesultingsimple
harmonic
motiondisplacemen
tx¼
Rco
sð!
tþ(Þ
---
hereshownfort¼
0
SuperpositionofTwoSimpleHarmonicVibrationsinOneDimension
13
thentheresultingdisplacementisgivenby
x¼x1þx2¼aðsin!1tþsin!2tÞ
¼2asinð!
1þ!2Þt
2cosð!
2!!1Þt
2
ThisexpressionisillustratedinFigure1.7.Itrepresentsasinusoidaloscillationatthe
averagefrequencyð!
1þ!2Þ=2havingadisplacementamplitudeof2awhichmodulates;
thatis,variesbetween2aandzeroundertheinfluenceofthecosinetermofamuchslower
frequencyequaltohalfthedifferenceð!
2!!1Þ=2betweentheoriginalfrequencies.
When
!1and!2arealmostequalthesinetermhasafrequencyveryclosetoboth
!1
and!2whilstthecosineenvelopemodulatestheamplitude2aatafrequency(!
2!!1)=2
whichisveryslow.
Acousticallythisgrowthanddecayoftheamplitudeisregisteredas‘beats’ofstrong
reinforcementwhentwosoundsofalmostequalfrequencyareheard.Thefrequencyofthe
‘beats’isð!
2!!1Þ,thedifference
betweentheseparatefrequencies(nothalfthe
difference)becausethemaximumamplitudeof2aoccurstwiceineveryperiodassociated
withthefrequency(!
2!!1Þ=2.Weshallmeetthissituationagainwhenweconsider
thecouplingoftwooscillatorsinChapter4andthewavegroupoftwocomponentsin
Chapter5.
2a
2a
x
ω2 − ω
1
2t
ωt
cos
ω2 +
ω1
2t
sin
Figure
1.7
Superpositionoftw
osimple
harmonic
displacemen
tsx1¼
asin!
1tan
dx2¼
asin!
2t
when
!2>
!1.Th
eslow
cos½ð!
2!!
1Þ=2)t
envelope
modulatesthe
sin½ð!
2þ!
1Þ=2)t
curve
betwee
nthevalues
x¼&2a
14
SimpleHarmonicMotion

SuperpositionofTwoPerpendicularSimple
Harmonic
Vibrations
(1)Vibration
sHav
ingEq
ual
Freq
uen
cies
Supposethataparticlemovesunderthesimultaneousinfluenceoftwosimpleharmonic
vibrationsofequalfrequency,onealongthexaxis,theotheralongtheperpendicularyaxis.
Whatisitssubsequentmotion?
Thisdisplacementsmaybewritten x¼a1sinð!tþ&1Þ
y¼a2sinð!tþ&2Þ
andthepathfollowedbytheparticleisformedbyeliminatingthetimetfromthese
equationstoleaveanexpressioninvolvingonlyxandyandtheconstants&1and&2.
Expandingtheargumentsofthesineswehave
x a1
¼sin!tcos&1þcos!tsin&1
and
y a2
¼sin!tcos&2þcos!tsin&2
Ifwecarryouttheprocess
x a1
sin&2!y a2
sin&1
$%
2
þy a2
cos&1!x a1
cos&2
$%
2
thiswillyield
x2
a2 1
þy2
a2 2
!2xy
a1a2
cosð&
2!&1Þ¼
sin2ð&
2!&1Þ
ð1:3Þ
whichisthegeneralequationforanellipse.
Inthemostgeneralcasetheaxesoftheellipseareinclinedtothexandyaxes,butthese
becometheprincipalaxeswhenthephasedifference
&2!&1¼
# 2
Equation(1.3)thentakesthefamiliarform
x2
a2 1
þy2
a2 2
¼1
thatis,anellipsewithsemi-axesa1anda2.
SuperpositionofTwoPerpendicularSimpleHarmonicVibrations
15
Ifa1¼a2¼athisbecomesthecircle
x2þy2¼a2
When
&2!&1¼0;2#;4#;etc:
theequationsimplifiesto
y¼a2
a1
x
whichisastraightlinethroughtheoriginofslopea2=a
1.
Againfor&2!&1¼
#,3#,5#,etc.,weobtain
y¼!a2
a1
x
astraightlinethroughtheoriginofequalbutoppositeslope.
Thepathstracedoutbytheparticleforvariousvaluesof'¼
&2!&1areshownin
Figure1.8andaremosteasilydemonstratedonacathoderayoscilloscope.
When
&2!&1¼0;#;2#;etc:
andtheellipsedegeneratesintoastraightline,theresultingvibrationlieswhollyinone
planeandtheoscillationsaresaidtobeplanepolarized.
δ = 0
δ = π 4
δ =
π 2δ =
δ =
π3 4
π
δ =
π5 4
δ =
π3 2
δ =
π7 4
δ = 2π
δ =
π 49
2 −
1
= δ
x =
a s
in (ω
t +
1)
y = a sin (ωt + 2)
φφ
φ
φ
Figure
1.8
Pathstraced
byasystem
vibratingsimultan
eouslyin
twoperpen
diculardirectionswith
simple
harmonic
motionsofeq
ual
freq
uen
cy.Th
ephasean
gle
'is
thean
gle
bywhichtheymotion
lead
sthexmotion
16
SimpleHarmonicMotion

Conventiondefinestheplaneofpolarizationasthatplaneperpendiculartotheplane
containingthevibrations.Similarlytheothervaluesof
&2!&1
yieldcircularorellipticpolarizationwherethetipofthevectorresultanttracesoutthe
appropriateconicsection.
(Problems1.14,1.15,1.16)
, Polarization
Polarizationisafundamentaltopicinopticsandarisesfromthesuperpositionoftwo
perpendicularsimpleharmonicopticalvibrations.WeshallseeinChapter8thatwhena
lightwaveisplanepolarizeditselectricalfieldoscillationlieswithinasingleplaneand
tracesasinusoidalcurvealongthedirectionofwavemotion.Substancessuchasquartzand
calcitearecapableofsplittinglightintotwowaveswhoseplanesofpolarizationare
perpendiculartoeachother.Exceptinaspecifieddirection,knownastheopticaxis,these
waveshavedifferentvelocities.Onewave,theordinaryorOwave,travelsatthesame
velocityinalldirectionsanditselectricfieldvibrationsarealwaysperpendiculartothe
opticaxis.TheextraordinaryorEwavehasavelocitywhichisdirection-dependent.Both
ordinaryandextraordinarylighthavetheirownrefractiveindices,andthusquartzand
calciteareknownasdoublyrefractingmaterials.Whentheordinarylightisfaster,asin
quartz,acrystalofthesubstanceisdefinedaspositive,butincalcitetheextraordinarylight
isfasteranditscrystalisnegative.Thesurfaces,spheresandellipsoids,whicharetheloci
ofthevaluesofthewavevelocitiesinanydirectionareshowninFigure1.9(a),andfora
Optic a
xis
O v
ibra
tion
E v
ibra
tion
x
y
xE
elli
psoid
O s
phere
z
y
O s
phere
E e
llipsoid
Optic a
xis
z
Quartz (+ve
)C
alc
ite (−ve
)
Figure1.9a
Ordinary(spherical)an
dextrao
rdinary(elliposoidal)wavesurfaces
indoubly
refracting
calcitean
dquartz.In
calcitetheEwaveis
faster
than
theOwave,
exceptalongtheopticaxis.In
quartz
theOwaveis
faster.Th
eOvibrationsarealwaysperpen
dicularto
theopticaxis,an
dtheOan
d
Evibrationsarealwaystangen
tial
totheirwavesurfaces
, Thissectionmaybeomittedatafirstreading.
Polarization
17
givendirectiontheelectricfieldvibrationsoftheseparatewavesaretangentialtothe
surfaceofthesphereorellipsoidasshown.Figure1.9(b)showsplanepolarizedlight
normallyincidentonacalcitecrystalcutparalleltoitsopticaxis.Withinthecrystalthe
fasterEwavehasvibrationsparalleltotheopticaxis,whiletheOwavevibrationsare
perpendiculartotheplaneofthepaper.Thevelocitydifferenceresultsinaphasegainof
theEvibrationovertheOvibrationwhichincreaseswiththethicknessofthecrystal.
Figure1.9(c)showsplanepolarizedlightnormallyincidentonthecrystalofFigure1.9(b)
withitsvibrationatanangleof45*oftheopticaxis.Thecrystalsplitsthevibrationinto
Pla
ne p
ola
rized
light norm
ally
incid
ent
O v
ibra
tion
to
pla
ne o
f paper
E v
ibra
tion
Optic
axis
Calc
ite
cry
sta
l
Figure1.9b
Planepolarizedlightnorm
ally
inciden
tonacalcitecrystalface
cutparallelto
itsoptic
axis.Th
ead
vance
oftheEwaveovertheOwaveis
equivalen
tto
againin
phase
E
O
45°
E v
ibra
tion 9
0°
ahead in p
hase
of O
vib
ration
O
E (O
ptic a
xis
)
Calc
ite
cry
sta
l
Optic a
xis
Phase d
iffe
rence
causes rota
tion o
fre
sultin
g e
lectric
field
vecto
r
Sin
usoid
al
vib
ration o
fele
ctric
fie
ld
Figure
1.9c
ThecrystalofFig.1.9cis
thicken
oughto
produceaphasegainof#=2
radin
the
EwaveovertheO
wave.
Wavereco
mbinationonleavingthecrystalproducescircularlypolarized
light
18
SimpleHarmonicMotion

equalEandOcomponents,andforagiventhicknesstheEwaveemergeswithaphasegain
of90*overtheOcomponent.Recombinationofthetwovibrationsproducescircularly
polarizedlight,ofwhichtheelectricfieldvectornowtracesahelixintheanticlockwise
directionasshown.
(2)VibrationsHav
ingDifferentFreq
uen
cies(Lissa
jousFigu
res)
Whenthefrequenciesofthetwoperpendicularsimpleharmonicvibrationsarenotequal
theresultingmotionbecomesmorecomplicated.Thepatternswhicharetracedarecalled
LissajousfiguresandexamplesoftheseareshowninFigure1.10wheretheaxial
frequenciesbearthesimpleratiosshownand
'¼
&2!&1¼0(ontheleft)
¼# 2(ontheright)
IftheamplitudesofthevibrationsarerespectivelyaandbtheresultingLissajousfigure
willalwaysbecontainedwithintherectangleofsides2aand2b.Thesidesoftherectangle
willbetangentialtothecurveatanumberofpointsandtheratioofthenumbersofthese
tangentialpointsalongthexaxistothosealongtheyaxisistheinverseoftheratioofthe
correspondingfrequencies(asindicatedinFigure1.10).
2a
2b
2b
2a
2b
2a
2a
2b
ωx
ωy
= 3
ωx
ωy
= 2
ωy
ωx
= 3
ωy
ωx
= 2
δ =
0
π 2δ =
Figure
1.10
Simple
Lissajous
figuresproduced
by
perpen
dicularsimple
harmonic
motionsof
differentan
gularfreq
uen
cies
Polarization
19
SuperpositionofaLargeNumbernofSimpleHarmonicVibrations
ofEqualAmplitudeaandEqualSuccessive
PhaseDifference
d
Figure1.11showstheadditionofnvectorsofequallengtha,eachrepresentingasimple
harmonicvibrationwithaconstantphasedifference
'fromitsneighbour.Twogeneral
physicalsituationsarecharacterizedbysuchasuperposition.ThefirstismetinChapter5
asawavegroupproblemwherethephasedifference
'arisesfromasmallfrequency
difference,'!,betweenconsecutivecomponents.ThesecondappearsinChapter12where
theintensityofopticalinterferenceanddiffractionpatternsareconsidered.There,the
superposedharmonicvibrationswillhavethesamefrequencybuteachcomponentwillhave
aconstantphasedifferencefromitsneighbourbecauseoftheextradistanceithastravelled.
Thefiguredisplaysthemathematicalexpression
Rcosð!tþ+Þ¼
acos!tþacosð!tþ'Þþacosð!tþ2'Þ
þ'''þ
acosð!tþ½n!1)'Þ
AB
a
a
a
a
a
a
a
C
r
O
rr α
δ
δ
δδ
δ
δ
δ
δ
90° −
290° −
2n δ
n δ
2n δ
R = 2r s
in
2 δa =
2r sin
Figure
1.11
Vectorsuperposition
ofa
largenumber
nofsimple
harmonic
vibrationsofeq
ual
amplitudeaan
deq
ual
successive
phasedifference
'.Th
eam
plitudeoftheresultan
t
R¼
2rsin
n' 2¼
asinn'=
2
sin'=
2
anditsphasewithrespectto
thefirstco
ntributionis
given
by
+¼ðn!
1Þ'=2
20
SimpleHarmonicMotion

whereRisthemagnitudeoftheresultantand+isitsphasedifferencewithrespecttothe
firstcomponentacos!t.
Geometricallyweseethateachlength a¼2rsin' 2
whereristheradiusofthecircleenclosingthe(incomplete)polygon.
FromtheisoscelestriangleOACthemagnitudeoftheresultant
R¼2rsinn' 2¼asinn'=2
sin'=2
anditsphaseangleisseentobe
+¼OAAB!OAAC
IntheisoscelestriangleOAC
OOAC¼90*!n' 2
andintheisoscelestriangleOAB
OAAB¼90*!' 2
so
+¼
90*!' 2
$%
!90*!n' 2
$%
¼ðn!1Þ' 2
thatis,halfthephasedifferencebetweenthefirstandthelastcontributions.Hencethe
resultant
Rcosð!tþ+Þ¼
asinn'=2
sin'=2cos
!tþðn!1Þ' 2
&'
Weshallobtainthesameresultlaterinthischapterasanexampleontheuseofexponential
notation.
Forthemomentletusexaminethebehaviourofthemagnitudeoftheresultant
R¼asinn'=2
sin'=2
whichisnotconstantbutdependsonthevalueof'.Whennisverylarge'isverysmall
andthepolygonbecomesanarcofthecirclecentreO,oflengthna¼A,withRasthe
chord.Then
+¼ðn!1Þ' 2-n' 2
SuperpositionofaLargeNumbernofSimpleHarmonicVibrations
21
and
sin' 2!
' 2-
+ n
Hence,inthislimit,
R¼asinn'=2
sin'=2¼asin+
+=n¼nasin+
+¼Asin+
+
ThebehaviourofAsin+=+versus+isshowninFigure1.12.Thepatternissymmetric
aboutthevalue+¼0andiszerowheneversin+¼0exceptat
+!0thatis,whensin
+=+!1.When
+¼0,'¼0andtheresultantofthenvectorsisthestraightlineoflength
A,Figure1.12(b).As'increasesAbecomesthearcofacircleuntilat+¼
#=2thefirstand
lastcontributionsareoutofphaseð2+¼
#ÞandthearcAhasbecomeasemicircleof
whichthediameteristheresultantRFigure1.12(c).Afurtherincreasein
'increases+and
curlstheconstantlengthAintothecircumferenceofacircle(+¼
#)withazeroresultant,
Figure
1.12(d).At+¼3#=2,Figure
1.12(e)thelength
Aisnow3/2
times
the
circumferenceofacirclewhosediameteristheamplitudeofthefirstminimum.
, SuperpositionofnEqual
SHMVectorsofLengthawith
Random
Phase
Whenthephasedifferencebetweenthesuccessivevectorsofthelastsectionmaytake
randomvalues
&betweenzeroand2#(measuredfromthexaxis)thevectorsuperposition
andresultantRmayberepresentedbyFigure1.13.
(b)
(c)
(e)
(d)
0
RA
2A
A
A=na
A =
R =
α
α
2π
ππ
π 2
2
π 23
3circum
fere
nce
A s
inα
Figure
1.12
(a)GraphofA
sin+=+
versus+,showingthemag
nitudeoftheresultan
tsfor(b)
+¼
0;(c)+¼
#/2
;(d)+¼
#an
d(e)+¼
3#/2
, Thissectionmaybeomittedatafirstreading.
22
SimpleHarmonicMotion

ThecomponentsofRonthexandyaxesaregivenby
Rx¼acos&1þacos&2þacos&3...acos&n
¼a
X
n
i¼1
cos&i
and
Ry¼a
X
n
i¼1
sin&i
where
R2¼R2 xþR2 y
Now
R2 x¼a2
X
n
i¼1
cos&i
!
2
¼a2
X
n
i¼1
cos2&iþ
X
n i¼1
i6¼j
cos&i
X
n
j¼1
cos&j
2 4
3 5
Inthetypicalterm2cos&icos&jofthedoublesummation,cos&iandcos&jhaverandom
valuesbetween&1andtheaveragedsumofsetsoftheseproductsiseffectivelyzero.
Thesummation
X
n
i¼1
cos2&i¼ncos2&
R
x
y
Figure1.13
Theresultan
tR¼
ffiffiffi n
paofnvectors,ea
choflength
a,havingrando
mphase.
Thisresult
isim
portan
tin
opticalinco
heren
cean
din
energyloss
from
waves
from
random
dissipationprocesses
SuperpositionofnEqualSHMVectorsofLengthawithRandomPhase
23
thatis,thenumberoftermsntimestheaveragevaluecos2&whichistheintegratedvalue
ofcos2&overtheintervalzeroto2#dividedbythetotalinterval2#,or
cos2&¼1 2#
ð
2#
0
cos2&d&¼1 2¼sin2&
So
R2 x¼a2
X
n
i¼1
cos2&i¼na2cos2&i¼na2
2
and
R2 y¼a2
X
n
i¼1
sin2&i¼na2sin2&i¼na2
2
giving
R2¼R2 xþR2 y¼na2
or
R¼
ffiffiffi n
pa
Thus,theamplitudeRofasystem
subjectedtonequalsimpleharmonicmotionsof
amplitudeawithrandomphasesinonly
ffiffiffi n
pawhereas,ifthemotionswereallinphaseR
wouldequalna.
Sucharesultillustratesaveryimportantprincipleofrandombehaviour.
(Problem
1.17)
App
lica
tion
s
IncoherentSources
inOptics
Theresultaboveisdirectlyapplicabletotheproblemof
coherenceinoptics.Lightsourceswhichareinphasearesaidtobecoherentandthis
conditionisessentialforproducingopticalinterferenceeffectsexperimentally.Ifthe
amplitudeofalightsourceisgivenbythequantityaitsintensityisproportionaltoa2,n
coherentsourceshavearesultingamplitudenaandatotalintensityn2a2.Incoherent
sourceshaverandomphases,nsuchsourceseachofamplitudeahavearesultingamplitude
ffiffiffi n
paandatotalintensityofna2.
Random
Processes
and
Energy
Absorption
Fromourpresentpointofviewthe
importanceofrandombehaviouristhecontributionitmakestoenergylossorabsorption
fromwavesmovingthroughamedium.Weshallmeetthisinallthewaveswediscuss.
24
SimpleHarmonicMotion

Randomprocesses,forexamplecollisionsbetweenparticles,inBrownianmotion,areof
greatsignificanceinphysics.Diffusion,viscosityorfrictionalresistanceandthermal
conductivityarealltheresultofrandomcollisionprocesses.Theseenergydissipating
phenomenarepresentthetransportofmass,momentumandenergy,andchangeonlyinthe
directionofincreasingdisorder.They
areknownas‘thermodynamicallyirreversible’
processesandareassociatedwiththeincreaseofentropy.Heat,forexample,canflowonly
fromabodyatahighertemperaturetooneatalowertemperature.Usingtheearlier
analysiswherethelengthaisnolongerasimpleharmonicamplitudebutisnowthe
averagedistanceaparticletravelsbetweenrandomcollisions(itsmeanfreepath),wesee
thatafternsuchcollisions(with,onaverage,equaltimeintervalsbetweencollisions)the
particlewill,onaverage,havetravelledonlyadistance
ffiffiffi n
pafromitspositionattimet¼0,
sothatthedistancetravelledvariesonlywiththesquarerootofthetimeelapsedinsteadof
beingdirectlyproportionaltoit.Thisisafeatureofallrandomprocesses.
Notalltheparticlesofthesystem
willhavetravelledadistance
ffiffiffi n
pabutthisdistanceis
themostprobableandrepresentsastatisticalaverage.
Randombehaviourisdescribed
bythediffusionequation(seethelastsectionof
Chapter7)andaconstantcoefficientcalledthediffusivityoftheprocesswillalways
arise.Thedimensionsofadiffusivityarealwayslength2/timeandmustbeinterpretedin
termsofacharacteristicdistanceoftheprocesswhichvariesonlywiththesquarerootof
time.
SomeUsefulMathem
atics
TheEx
ponen
tial
Series
Bya‘naturalprocess’ofgrowthordecaywemeanaprocessinwhichaquantitychanges
byaconstantfractionofitselfinagivenintervalofspaceortime.A5%perannum
compoundinterestrepresentsanaturalgrowthlaw;attenuationprocessesinphysicsusually
describenaturaldecay.
Thelawisexpresseddifferentiallyas
dN N¼&+dx
or
dN N¼&+dt
whereNisthechangingquantity,+isaconstantandthepositiveandnegativesigns
representgrowthanddecayrespectively.ThederivativesdN/dxordN/dtaretherefore
proportionaltothevalueofNatwhichthederivativeismeasured.
IntegrationyieldsN¼N0e&+xorN¼N0e&+twhereN0isthevalueatxort¼0ande
istheexponentialorthebaseofnaturallogarithms.Theexponentialseriesisdefinedas
ex¼1þxþx2
2!þx3
3!þ'''þ
xn
n!þ'''
andisshowngraphicallyforpositiveandnegativexinFigure1.14.Itisimportanttonote
thatwhatevertheformoftheindexofthelogarithmicbasee,itisthepowertowhichthe
SomeUsefulMathematics
25
baseisraised,andisthereforealwaysnon-dimensional.Thuse+xisnon-dimensionaland+
musthavethedimensionsofx!1.Writing
e+x¼1þ+xþð+xÞ22!þð+xÞ33!þ'''
itfollowsimmediatelythat
d dxðe
+xÞ¼
+þ2+2
2!xþ3+3
3!x2þ'''
¼+1þ+xþð+xÞ22!þð+xÞ33!
!
þ'''
"#
¼+e+x
Similarly
d2
dx2ðe
+xÞ¼
+2e+x
InChapter2weshallused(e
+t )=dt¼
+e+tandd2(e
+t )=dt2¼
+2e+tonanumberof
occasions.
Bytakinglogarithmsitiseasily
shownthatexey¼exþysince
logeðexeyÞ¼
logeexþlogeey¼xþy.
TheNotationi¼
ffiffiffiffiffiffiffi
!1
p
Thecombinationoftheexponentialserieswiththecomplexnumbernotationi¼
ffiffiffiffiffiffiffi
!1
pis
particularlyconvenientinphysics.Hereweshallshowthemathematicalconveniencein
expressingsineorcosine(oscillatory)behaviourintheform
eix¼cosxþisinx.
0x
y 1
y =
ex
y =
e−x
Figure
1.14
Thebeh
aviouroftheexponen
tial
series
y¼
exan
dy¼
e!x
26
SimpleHarmonicMotion

InChapter3weshallseetheadditionalmeritofiinitsroleofvectoroperator.
Theseriesrepresentationofsinxiswritten
sinx¼x!x3
3!þx5
5!!x7
7!'''
andthatofcosxis
cosx¼1!x2
2!þx4
4!!x6
6!'''
Since
i¼
ffiffiffiffiffiffiffi
!1
p;i2¼!1;i3¼!i
etc.wehave
eix¼1þixþðixÞ22!þðixÞ33!þðixÞ44!þ'''
¼1þix!x2
2!!ix3
3!þx4
4!þ'''
¼1!x2
2!þx4
4!þix!x3
3!þx5
5!þ'''
$%
¼cosxþisinx
Wealsoseethat
d dxðeixÞ¼
ieix¼icosx!sinx
Oftenweshallrepresentasineorcosineoscillationbytheformeixandrecovertheoriginal
formbytakingthatpartofthesolutionprecededbyiinthecaseofthesine,andthereal
partofthesolutioninthecaseofthecosine.
Exam
ples
(1)Insimpleharmonicmotion(€ xxþ!2x¼0)letustrythesolutionx¼aei!tei&,wherea
isaconstantlength,and&(andthereforeei&)isaconstant.
dx dt¼
_ xx¼i!aei!tei&¼i!x
d2x
dt2¼
€ xx¼i2!2aei!tei&¼!!2x
Therefore
x¼aei!tei&¼aeið!tþ
&Þ
¼acosð!tþ&Þþ
iasinð!tþ&Þ
isacompletesolutionof€ xxþ!2x¼0.
SomeUsefulMathematics
27
Onp.6weusedthesineformofthesolution;thecosineformisequallyvalidandmerely
involvesanadvanceof#=2inthephase&.
(2)
eixþe!ix¼21!x2
2!þx4
4!!'''
$%
¼2cosx
eix!e!ix¼2ix!x3
3!þx5
5!!'''
$%
¼2isinx
(3)Onp.21weusedageometricalmethodtoshowthattheresultantofthesuperposed
harmonicvibrations
acos!tþacosð!tþ'Þþacosð!tþ2'Þþ'''þ
acosð!tþ½n!1)'Þ
¼asinn'=2
sin'=2cos
!tþ
n!1
2
$%
'
12
Wecanderivethesameresultusingthecomplexexponentialnotationandtakingthereal
partoftheseriesexpressedasthegeometricalprogression
aei!tþaeið!tþ
'Þþaeið!tþ2'Þþ'''þ
aei½!tþðn!1Þ')
¼aei!t ð1þzþz2þ'''þ
zðn!1Þ Þ
wherez¼ei'.
Writing
SðzÞ¼
1þzþz2þ'''þ
zn!1
and
z½SðzÞ)¼zþz2þ'''þ
zn
wehave
SðzÞ¼
1!zn
1!z¼1!ein'
1!ei'
So
aei!t SðzÞ¼
aei!t1!ein'
1!ei'
¼aei!tein'=2ðe!in'=2!ein'=2Þ
ei'=2ðe!i'=2!ei'=2Þ
¼aei½!tþ
n!12ðÞ')sinn'=2
sin'=2
28
SimpleHarmonicMotion

withtherealpart
¼acos
!tþ
n!1
2
$%
'
&'
sinn'=2
sin'=2
whichrecoverstheoriginalcosineterm
fromthecomplexexponentialnotation.
(Problem
1.18)
(4)Supposewerepresentaharmonicoscillationbythecomplexexponentialform
z¼aei!t
whereaistheamplitude.Replacingiby!idefinesthecomplexconjugate
z,¼ae!i!t
TheuseofthisconjugateisdiscussedmorefullyinChapter3butherewecannotethatthe
productofacomplexquantityanditsconjugateisalwaysequaltothesquareofthe
amplitudefor
zz,¼a2ei!te!i!t¼a2eði!
iÞ!t¼a2e0
¼a2
(Problem
1.19)
Problem
1.1
Theequationofmotion
m€ xx¼!sx
with
!2¼s m
appliesdirectlytothesystem
inFigure1.1(c).
IfthependulumbobofFigure1.1(a)isdisplacedasmalldistancexshowthatthestiffness(restoring
forceperunitdistance)ismg=landthat!2¼g=lwheregistheaccelerationduetogravity.Nowuse
thesmallangulardisplacement(insteadofxandshowthat
!isthesame.
InFigure1.1(b)theangularoscillationsarerotationalsothemassisreplacedbythemomentof
inertiaIofthediscandthestiffnessbytherestoringcoupleofthewirewhichisCrad!1ofangular
displacement.Showthat
!2¼C=I.
InFigure1.1(d)showthatthestiffnessis2T=landthat
!2¼2T=lm.
InFigure1.1(e)showthatthestiffnessofthesystem
in2 Ag,whereAistheareaofcrosssection
andthat
!2¼2g=lwheregistheaccelerationduetogravity.
SomeUsefulMathematics
29
InFigure1.1(f)onlythegasintheflaskneckoscillates,behavingasapistonofmass Al.Ifthe
pressurechangesarecalculatedfromtheequationofstateusetheadiabaticrelationpV
,¼constant
andtakelogarithmstoshowthatthepressurechangeintheflaskis
dp¼!,pdV V¼!,pAx V;
wherexisthegasdisplacementintheneck.Henceshowthat
!2¼
,pA=l V.Notethat
,pisthe
stiffnessofagas(seeChapter6).
InFigure1.1(g),ifthecross-sectionalareaoftheneckisAandthehydrometerisadistancexabove
itsnormalfloatinglevel,therestoringforcedependsonthevolumeofliquiddisplaced(Archimedes’
principle).Showthat
!2¼g A=m.
Checkthedimensionsof!2foreachcase.
Problem
1.2
ShowbythechoiceofappropriatevaluesforAandBinequation(1.2)thatequallyvalidsolutions
forxare
x¼acosð!tþ&Þ
x¼asinð!t!&Þ
x¼acosð!t!&Þ
andcheckthatthesesolutionssatisfytheequation
€ xxþ!2x¼0
Problem
1.3
ThependuluminFigure1.1(a)swingswithadisplacementamplitudea.Ifitsstartingpointfromrest
is
ðaÞx¼a
ðbÞx¼!a
findthedifferentvaluesofthephaseconstant&forthesolutions
x¼asinð!tþ&Þ
x¼acosð!tþ&Þ
x¼asinð!t!&Þ
x¼acosð!t!&Þ
Foreachofthedifferentvaluesof&,findthevaluesof!tatwhichthependulumswingsthroughthe
positions
x¼þa=
ffiffiffi 2
p
x¼a=2
30
SimpleHarmonicMotion

and
x¼0
forthefirsttimeafterreleasefrom
x¼&a
Problem
1.4
Whentheelectroninahydrogenatomboundtothenucleusmovesasmalldistancefromits
equilibriumposition,arestoringforceperunitdistanceisgivenby
s¼e2=4#- 0r2
wherer¼0:05nmmaybetakenastheradiusoftheatom.Showthattheelectroncanoscillatewith
asimpleharmonicmotionwith
!0-4:5010!16rads!1
Iftheelectronisforcedtovibrateatthisfrequency,inwhichregionoftheelectromagneticspectrum
woulditsradiationbefound?
e¼1:6010!19C;electronmassme¼9:1010!31kg
-0¼8:85010!12N!1m!2C2
Problem
1.5
Showthatthevaluesof!2forthethreesimpleharmonicoscillations(a),(b),(c)inthediagramare
intheratio1:2:4.
m
mm
ss
ss s
(a)
(b)
(c)
Problem
1.6
Thedisplacementofasimpleharmonicoscillatorisgivenby
x¼asinð!tþ&Þ
Iftheoscillationstartedattimet¼0fromapositionx0withavelocity
_ xx¼
v0showthat
tan&¼
!x0=v0
and
a¼ðx2 0þv2 0=!2Þ1
=2
SomeUsefulMathematics
31
Problem
1.7
Aparticleoscillateswithsimpleharmonicmotionalongthexaxiswithadisplacementamplitudea
andspendsatimedtinmovingfromxtoxþdx.Showthattheprobabilityoffindingitbetweenx
andxþdxisgivenby
dx
#ða2!x2Þ1
=2
(inwavemechanicssuchaprobabilityisnotzeroforx>a).
Problem.1.8
Manyidenticalsimpleharmonicoscillatorsareequallyspacedalongthexaxisofamediumanda
photographshowsthatthelocusoftheirdisplacementsintheydirectionisasinecurve.Ifthe
distance
/separatesoscillatorswhichdifferinphaseby2#radians,whatisthephasedifference
betweentwooscillatorsadistancexapart?
Problem
1.9
Amassstandsonaplatform
whichvibratessimpleharmonicallyinaverticaldirectionata
frequencyof5Hz.Showthatthemasslosescontactwiththeplatform
whenthedisplacement
exceeds10!2m.
Problem
1.10
AmassMissuspendedattheendofaspringoflengthlandstiffnesss.Ifthemassofthespringism
andthevelocityofanelementdyofitslengthisproportionaltoitsdistanceyfromthefixedendof
thespring,showthatthekineticenergyofthiselementis
1 2
m ldy
34
y lv
34
2
wherevisthevelocityofthesuspendedmassM.Hence,byintegratingoverthelengthofthespring,
showthatitstotalkineticenergyis1 6mv2and,fromthetotalenergyoftheoscillatingsystem,show
thatthefrequencyofoscillationisgivenby !2¼
s
Mþm=3
Problem
1.11
Thegeneralform
fortheenergyofasimpleharmonicoscillatoris
E¼
1 2mass(velocity)2þ1 2stiffness(displacement)2
SetuptheenergyequationsfortheoscillatorsinFigure1.1(a),(b),(c),(d),(e),(f)and(g),anduse
theexpression
dE dt¼0
toderivetheequationofmotionineachcase.
32
SimpleHarmonicMotion

Problem
1.12
Thedisplacementofasimpleharmonicoscillatorisgivenbyx¼asin!t.Ifthevaluesofthe
displacementxandthevelocity
_ xxareplottedonperpendicularaxes,eliminatettoshowthatthelocus
ofthepoints(x;_ xx)isanellipse.Showthatthisellipserepresentsapathofconstantenergy.
Problem
1.13
InChapter12theintensityofthepatternwhenlightfromtwoslitsinterferes(Young’sexperiment)
willbeseentodependonthesuperpositionoftwosimpleharmonicoscillationsofequalamplitudea
andphasedifference
'.Showthattheintensity
I¼R2/4a2cos2'=2
Betweenwhatvaluesdoestheintensityvary?
Problem
1.14
Carryouttheprocessindicatedinthetexttoderiveequation(1.3)onp.15.
Problem
1.15
Theco-ordinatesofthedisplacementofaparticleofmassmaregivenby
x¼asin!t
y¼bcos!t
Eliminatettoshowthattheparticlefollowsanellipticalpathandshowbyaddingitskineticand
potentialenergyatanypositionx,ythattheellipseisapathofconstantenergyequaltothesumof
theseparateenergiesofthesimpleharmonicvibrations.
Provethatthequantitymðx_ yy!y_ xxÞisalsoconstant.Whatdoesthisquantityrepresent?
Problem
1.16
Twosimpleharmonicmotionsofthesamefrequencyvibrateindirectionsperpendiculartoeach
otheralongthexandyaxes.Aphasedifference
'¼
&2!&1
existsbetweenthem
suchthattheprincipalaxesoftheresultingellipticaltraceareinclinedatan
angletothexandyaxes.Showthatthemeasurementoftwoseparatevaluesofx(ory)issufficientto
determinethephasedifference.
(Hint:useequation(1.3)andmeasurey(max),andyfor(x¼0.)
Problem
1.17
Takearandomgroupofn>7valuesof&intherange02&2#andform
theproduct
X
n i¼1
i6¼j
cos&i
X
n
j¼1
cos&j
Showthattheaveragevalueobtainedforseveralsuchgroupsisnegligiblewithrespectton=2.
SomeUsefulMathematics
33
Problem
1.18
Usethemethodofexample(3)(p.28)toshowthat
asin!tþasinð!tþ'Þþasinð!tþ2'Þþ'''þ
asin½!tþðn!1Þ')
¼asin
!tþðn!1Þ
2'
&'
sinn'=2
sin'=2
Problem
1.19
Ifwerepresentthesumoftheseries
acos!tþacosð!tþ'Þþacosð!tþ2'Þþ'''þ
acos½!tþðn!1Þ')
bythecomplexexponentialform
z¼aei!t ð1þei'þei2'þ'''þ
eiðn!1Þ'Þ
showthat
zz,¼a2sin2n'=2
sin2'=2
Summary
ofIm
portantResults
SimpleHarmonicOscillator(massm,stiffnesss,amplitudea)
Equationofmotion€ xxþ!2x¼0where!2¼s=m
Displacementx¼asinð!tþ&Þ
Energy¼
1 2m_ xx2þ1 2sx2¼
1 2m!2a2¼
1 2sa2¼constant
Supe
rpos
ition(A
mplitude
andPhas
e)of
twoSH
Ms
One-dimen
sion
al
Equal
!,differentamplitudes,phasedifference
',resultantRwhereR2¼a2 1þa2 2þ
2a1a2cos'
Different!,equalamplitude,
x¼x1þx2¼aðsin!1tþsin!2tÞ
¼2asinð!
1þ!2Þt
2cosð!
2!!1Þt
2
Two-dimen
sion
al:pe
rpen
dicu
larax
esEqual
!,differentamplitude—
givinggeneralconicsection
x2
a2 1
þy2
a2 2
!2xy
a1a2
cosð&
2!&1Þ¼
sin2ð&
2!&1Þ
(basisofopticalpolarization)
34
SimpleHarmonicMotion

SuperpositionofnSHMVectors(equalamplitudea,constantsuccessivephasedifference
')
TheresultantisRcosð!tþ+Þ,where R¼asinn'=2
sin'=2
and
+¼ðn!1Þ'=2
Importantinopticaldiffractionandwavegroupsofmanycomponents.
SomeUsefulMathematics
35

2 DampedSimple
Harm
onicMotion
Initia
lly
we
dis
cuss
edth
eca
seof
idea
lsi
mple
har
monic
motion
wher
eth
eto
tal
ener
gy
rem
ained
const
antan
dth
edis
pla
cem
entfo
llow
eda
sine
curv
e,ap
par
ently
for
anin
finite
tim
e.In
pra
ctic
eso
me
ener
gy
isal
way
sdis
sipat
edby
are
sist
ive
or
vis
cous
pro
cess
;fo
r
exam
ple
,th
eam
plitu
de
of
afr
eely
swin
gin
gpen
dulu
mw
ill
alw
ays
dec
ayw
ith
tim
eas
ener
gy
islo
st.The
pre
sence
of
resi
stan
ceto
motion
mea
ns
that
anoth
erfo
rce
isac
tive,
whic
his
taken
asbei
ng
pro
portio
nal
toth
evel
oci
ty.
The
fric
tional
forc
eac
tsin
the
direc
tion
opposi
teto
that
of
the
vel
oci
ty(s
eeFig
ure
2.1
)an
dso
New
ton’s
Sec
ond
law
bec
om
es
m€ xx¼!sx!r_ xx
wher
er
isth
eco
nst
ant
of
pro
portio
nal
ity
and
has
the
dim
ensi
ons
of
forc
eper
unit
of
vel
oci
ty.The
pre
sence
of
such
ate
rmw
illal
way
sre
sult
inen
ergy
loss
.
The
pro
ble
mnow
isto
find
the
beh
avio
urofth
edis
pla
cem
entx
from
the
equat
ion
m€ xxþr_ xxþsx¼
0ð2
:1Þ
wher
eth
eco
effici
entsm
,r
ands
are
const
ant.
When
thes
eco
effici
ents
are
const
ant
aso
lution
of
the
form
x¼C
e!t
can
alw
ays
be
found.
Obvio
usl
y,si
nce
anex
ponen
tial
term
isal
way
snondim
ensi
onal
,C
has
the
dim
ensi
ons
ofx
(ale
ngth
,sa
y)
and
!has
the
dim
ensi
ons
ofin
ver
setim
e,T!
1.W
esh
all
see
that
ther
ear
eth
ree
poss
ible
form
sof
this
solu
tion,
each
des
crib
ing
adiffe
rent
beh
avio
urofth
edis
pla
cem
entx
with
tim
e.In
two
ofth
ese
solu
tionsC
appea
rsex
plici
tly
as
aco
nst
antle
ngth
,butin
the
third
case
itta
kes
the
form
C¼AþBt%
ThePhysicsofVibrationsandWaves,
6th
Editio
nH
.J.
Pai
n#
2005
John
Wiley
&Sons,
Ltd
%The
num
ber
ofco
nstan
tsal
low
edin
the
gen
eral
solu
tion
ofa
diffe
rential
equat
ion
isal
way
seq
ual
toth
eord
er(that
is,th
ehig
hes
tdiffe
rential
coef
fici
ent)
ofth
eeq
uat
ion.The
two
val
uesA
andB
are
allo
wed
bec
ause
equat
ion
(2.1
)is
seco
nd
ord
er.Theval
ues
ofth
eco
nstan
tsar
ead
justed
tosa
tisf
yth
e
initia
lco
nditio
ns.
37
wher
eA
isa
length
,B
isa
vel
oci
tyan
dtis
tim
e,giv
ingC
the
over
alldim
ensi
ons
of
a
length
,as
we
expec
t.Fro
mour
poin
tofvie
wth
isca
seis
notth
em
ost
importan
t.
Tak
ingC
asa
const
antle
ngth
giv
es_ xx¼
!C
e!tan
d€ xx¼
!2C
e!t ,
soth
ateq
uat
ion
(2.1
)
may
be
rew
ritten
Ce
!t ðm
!2þr!þsÞ¼
0
soth
atei
ther
x¼C
e!t¼
0(w
hic
his
triv
ial)
or
m!
2þr!þs¼
0
Solv
ing
the
quad
ratic
equat
ion
in!
giv
es
!¼!r
2m&
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
r2
4m
2!s m
r
Note
thatr=
2m
andðs
=mÞ1
=2,an
dth
eref
ore
,!,al
lhav
eth
edim
ensi
ons
of
inver
setim
e,
T!
1,w
hic
hw
eex
pec
tfr
om
the
form
ofe
!t .
The
dis
pla
cem
entca
nnow
be
expre
ssed
as
x1¼C
1e!rt
=2mþðr
2=4m
2!s=mÞ
1=2t ;
x2¼C
2e!rt
=2m!ðr
2=4m
2!s=mÞ
1=2t
orth
esu
mofboth
thes
ete
rms
x¼x
1þx
2¼C
1e!rt
=2mþðr
2=4m
2!s=mÞ
1=2tþC
2e!rt
=2m!ðr
2=4m
2!s=mÞ
1=2t
The
bra
cketðr
2=4m
2!s=mÞca
nbe
posi
tive,
zero
orneg
ativ
edep
endin
gon
the
rela
tive
mag
nitude
of
the
two
term
sin
side
it.
Eac
hof
thes
eco
nditio
ns
giv
esone
of
the
thre
e
poss
ible
solu
tions
refe
rred
toea
rlie
ran
dea
chso
lution
des
crib
esa
par
ticu
lar
kin
dof
m
Frictional
force
F = −rx
s
x
Figure
2.1
Simple
harmonic
motionsystem
withadam
pingorfrictional
force
r_ xxactingag
ainst
the
directionofmotion.Th
eeq
uationofmotionis
m€ xxþ
r_ xxþ
sx¼
0
38
DampedSimpleHarmonicMotion

behaviour.Weshalldiscuss
thesesolutionsin
order
ofincreasingsignificance
from
our
pointofview;thethirdsolutionistheoneweshallconcentrateuponthroughouttherestof
this
book.
Theconditionsare:
(1)Bracketpositive
ðr2=4m
2>s=mÞ.
Here
the
dam
ping
resistance
term
r2=4m
2
dominates
thestiffnessterm
s=m,andheavydam
pingresultsin
adeadbeatsystem
.
(2)Bracketzero
ðr2=4m
2¼s=mÞ.
The
balance
between
the
two
term
sresultsin
a
criticallydampedsystem
.
Neither
(1)nor(2)gives
oscillatory
behaviour.
(3)Bracketnegativeðr
2=4m
2<s=mÞ.Thesystem
islightlydam
ped
andgives
oscillatory
dampedsimpleharmonicmotion.
Case
1.Hea
vyDamping
Writingr=2m
¼pand
ðr2=4m
2#s=mÞ1
=2¼q,wecanreplace
x¼C
1e
#rt=2mþ
ðr2=4m
2#s=mÞ1
=2tþC
2e
#rt=2m#
ðr2=4m
2#s=mÞ1
=2t
by
x¼
e#pt ðC
1eqtþC
2e
#qtÞ;
wheretheC
1andC
2arearbitrary
invaluebuthavethesamedim
ensionsasC(note
that
twoseparatevalues
ofC
areallowed
because
thedifferential
equation(2.1)is
second
order).
IfnowF
¼C
1þC
2andG
¼C
1#C
2,thedisplacementisgiven
by
x¼
e#ptF 2
ðeqtþe
#qt Þ
þG 2
ðeqt#e
#qt Þ
!
or
x¼
e#pt ðF
coshqtþGsinhqtÞ
This
represents
non-oscillatory
behaviour,buttheactual
displacementwilldependupon
theinitial(orboundary)conditions;that
is,thevalueofxat
timet¼
0.Ifx¼
0att¼
0
thenF
¼0,and
x¼Ge
#rt=2msinh
r2
4m
2#s m
"#
1=2
t
Figure
2.2
illustratessuch
behaviourwhen
aheavilydam
ped
system
isdisturbed
from
equilibrium
byasudden
impulse(that
is,given
avelocity
att¼
0).Itwillreturn
tozero
DampedSimpleHarmonicMotion
39
displacementquite
slowly
withoutoscillating
aboutits
equilibrium
position.More
advancedmathem
aticsshowsthatthevalueofthevelocitydx=dtvanishes
only
once
sothat
thereis
only
onevalueofmaxim
um
displacement.
(Problem
2.1)
Case
2.CriticalDamping
ðr2=4
m2¼
s=mÞ
UsingthenotationofCase1,weseethatq
¼0andthatx¼
e#pt ðC
1þC
2Þ.This
is,in
fact,thelimitingcase
ofthebehaviourofCaseIasqchanges
from
positiveto
negative.In
this
case
thequadraticequationin
$has
equal
roots,which,in
adifferential
equation
solution,dem
andsthatCmustbewrittenC
¼A
þBt,whereAisaconstantlength
andBa
given
velocity
whichdependsontheboundaryconditions.Itiseasily
verified
thatthevalue
x¼
ðAþBtÞe
#rt=2m
¼ðA
þBtÞe
#pt
satisfiesm€ xxþr_ xxþsx
¼0whenr2=4m
2¼s=m.
(Problem
2.2)
Applicationto
aDamped
MechanicalOscillator
Criticaldam
pingis
ofpractical
importance
inmechanical
oscillators
whichexperience
sudden
impulses
andarerequired
toreturn
tozero
displacementin
theminim
um
time.
Suppose
such
asystem
has
zero
displacementatt¼
0andreceives
anim
pulsewhichgives
itan
initialvelocityV.
Time
r increasing
Displacement
Heavy damping
r 2
4m 2
s m
>
Figu
re2.2
Non-oscillatory
behaviourofdam
ped
simple
harmonic
system
withheavy
dam
ping
(wherer2=4
m2>
s=m)afterthesystem
has
beengiven
animpulsefrom
arest
positionx¼
0
40
DampedSimpleHarmonicMotion

Thenx¼
0(sothatA
¼0)and_ xx¼V
att¼
0.However,
_ xx¼B½ð#ptÞe
#ptþe
#pt &
¼Batt¼
0
sothatB
¼V
andthecomplete
solutionis
x¼Vte
#pt
Themaxim
um
displacementxoccurswhen
thesystem
comes
torestbefore
returningto
zero
displacement.Atmaxim
um
displacement
_ xx¼Ve
#pt ð1
#ptÞ
¼0
thusgiving
ð1#ptÞ
¼0,i.e.t¼
1=p.
Atthistimethedisplacementistherefore
x¼Vte
#pt¼V p
e#1
¼0:368V p
¼0:3682mV
r
Thecurveofdisplacementversustimeis
shownin
Figure
2.3;thereturn
tozero
ina
critically
dam
ped
system
isreached
inminimum
time.
Case
3.Damped
Simple
Harm
onic
Motion
Whenr2=4m
2<s=mthedam
pingislight,andthisgives
from
thepresentpointofviewthe
most
importantkindofbehaviour,oscillatorydampedsimpleharmonicmotion.
r 2
4m 2
s m
2m r
t =
m r=
Displacement
Time
0
Critical
damping
2Ve−1
x =
Figu
re2.3
Limitingcase
ofnon-oscillatory
behaviourofdam
ped
simple
harmonic
system
where
r2=4
m2¼
s=m
(criticaldam
ping)
DampedSimpleHarmonicMotion
41
Theexpression
ðr2=4m
2#s=mÞ1
=2is
anim
aginary
quantity,thesquarerootofa
negativenumber,whichcanberewritten
'r2
4m
2#s m
"#
1=2
¼'
ffiffiffiffiffiffiffi
#1
ps m
#r2
4m
2
"#
1=2
¼'is m
#r2
4m
2
"#
1=2
ðwherei¼
ffiffiffiffiffiffiffi
#1
pÞ
sothedisplacement
x¼C
1e
#rt=2me
þiðs
=m#r2=4m
2Þ1
=2tþC
2e
#rt=2me
#iðs
=m#r2=4m
2Þ1
=2t
Thebracket
has
thedim
ensionsofinverse
time;
that
is,offrequency,andcanbewritten
ðs=m
#r2=4m
2Þ1
=2¼
!0 ,
sothat
the
second
exponential
becomes
ei!
0 t¼
cos!
0 tþ
isin!
0 t:This
showsthat
thebehaviourofthedisplacementxis
oscillatory
withanew
frequency
!0 <
!¼
ðs=mÞ1
=2,thefrequency
ofidealsimpleharmonicmotion.Tocompare
thebehaviourofthedam
ped
oscillatorwiththeidealcase
weshould
liketo
express
the
solutionin
aform
similar
tox¼Asinð!
0 tþ'Þas
intheidealcase,where!
has
been
replacedby!
0 .Wecandothisbywriting
x¼
e#rt=2mðC
1ei!
0 tþC
2e
#i!
0 tÞ
Ifwenow
choose
C1¼A 2iei'
and
C2¼
#A 2ie
#i'
whereAand'(andthusei')areconstantswhichdependonthemotionatt¼
0,wefind
aftersubstitution
x¼Ae
#rt=2m½e
ið!0 tþ'Þ#e
#ið!
0 tþ'Þ&
2i
¼Ae
#rt=2msinð!
0 tþ'Þ
This
procedure
isequivalentto
imposingtheboundaryconditionx¼Asin'att¼
0
uponthesolutionforx.Thedisplacementtherefore
variessinusoidally
withtimeas
inthe
case
ofsimple
harmonic
motion,butnow
has
anew
frequency
!0 ¼
s m#r2
4m
2
"#
1=2
42
DampedSimpleHarmonicMotion

anditsam
plitudeAismodified
bytheexponential
term
e#rt=2m,aterm
whichdecayswith
time. Ifx¼
0att¼
0then
'¼
0;Figure
2.4
showsthebehaviourofxwith
time,
its
oscillationsgradually
decayingwiththeenvelopeofmaxim
um
amplitudes
followingthe
dotted
curvee
#rt=2m.TheconstantAisobviouslythevalueto
whichtheam
plitudewould
haverisenat
thefirstmaxim
um
ifnodam
pingwerepresent.
Thepresence
oftheforcetermr_ xxin
theequationofmotiontherefore
introducesaloss
of
energywhichcausestheam
plitudeofoscillationto
decay
withtimeas
e#rt=2m.
(Problem
2.3)
MethodsofDes
cribingth
eDam
pingofan
Oscillato
r
Earlier
inthischapterwesaw
that
theenergyofan
oscillatorisgiven
by
E¼
1 2ma2!
2¼
1 2sa
2
that
is,proportional
tothesquareofitsam
plitude.
Wehavejustseen
that
inthepresence
ofadam
pingforcer_ xxtheam
plitudedecayswith
timeas
e#rt=2m
sothat
theenergydecay
willbeproportional
to
ðe#rt=2mÞ2
that
is,e
#rt=m.Thelarger
thevalueofthedam
pingforcerthemore
rapid
thedecay
ofthe
amplitudeandenergy.Thuswecanuse
theexponentialfactorto
express
theratesatwhich
theam
plitudeandenergyarereduced.
τ′
τ′
2
t
r t
2m
r 2
4m
2
s m
e
<
Displacement
−
Figu
re2.4
Dam
ped
oscillatory
motionwheres=m
>r2=4m
2.Theam
plitudedecayswithe
#rt=2
m,
andthereducedangularfrequency
isgiven
by!
02¼
s=m
#r2=4
m2
MethodsofDescribingtheDampingofanOscillator
43
Loga
rithmic
Decremen
t
Thismeasurestherate
atwhichtheamplitudediesaw
ay.Suppose
intheexpression
x¼Ae
#rt=2msinð!
0 tþ'Þ
wechoose
'¼
(=2
andwewrite
x¼A
0e
#rt=2mcos!
0 t
withx¼A
0att¼
0.Itsbehaviourwillfollow
thecurvein
Figure
2.5.
Iftheperiodofoscillationis)
0 where!
0 ¼2(=)
0 ,then
oneperiodlatertheam
plitudeis
given
by
A1¼A
0e
ð#r=2mÞ)
0
sothat
A0
A1
¼er)
0 =2m
¼e*
A0
At
A2
t0
τ ′
τ ′
τ ′
τ ′
e
r2m
t
e
r2m
(2 )
e
r2m
−
−
−
Figu
re2.5
Thelogarithmic
ratio
ofanytwo
amplitudes
oneperiod
apartis
thelogarithmic
decrement,defined
as*¼
logeðA
n=A
nþ1Þ¼
r)0 =2m
44
DampedSimpleHarmonicMotion

where
*¼
r 2m
)0 ¼
loge
A0
A1
iscalled
thelogarithmicdecrement.(N
otethatthisuse
of*differsfrom
thatin
Figure
1.11).
Thelogarithmic
decrement*isthelogarithm
oftheratiooftwoam
plitudes
ofoscillation
whichareseparated
byoneperiod,thelarger
amplitudebeingthenumeratorsince
e*>
1.
Sim
ilarly
A0
A2
¼erð2)
0 Þ=2m
¼e2*
and
A0
An
¼en*
Experim
entally,
thevalueof*is
bestfoundbycomparingam
plitudes
ofoscillations
whichareseparated
bynperiods.Thegraphof
loge
A0
An
versusnfordifferentvalues
ofnhas
aslope*.
RelaxationTimeorModulusof
Decay
Another
way
ofexpressingthedam
pingeffect
isbymeansofthetimetaken
forthe
amplitudeto
decay
to
e#1¼
0:368
ofitsoriginalvalueA
0.Thistimeiscalled
therelaxationtimeormodulusofdecayandthe
amplitude
At¼A
0e
#rt=2m
¼A
0e
#1
atatimet¼
2m=r.
Measuringthenaturaldecay
interm
softhefractione
#1oftheoriginal
valueisavery
commonprocedure
inphysics.Thetimeforanaturaldecay
process
toreachzero
is,of
course,
theoreticallyinfinite.
(Problem
2.4)
TheQuality
FactororQ-valueof
aDamped
Simple
Harm
onic
Oscillator
This
measurestherate
atwhichtheenergydecays.
Since
thedecay
oftheam
plitudeis
representedby
A¼A
0e
#rt=2m
MethodsofDescribingtheDampingofanOscillator
45
thedecay
ofenergyis
proportional
to A2¼A
2 0e
ð#rt=2mÞ2
andmay
bewritten
E¼E
0e
ð#r=mÞt
whereE
0is
theenergyvalueatt¼
0.
ThetimefortheenergyEto
decay
toE
0e
#1isgiven
byt¼m=r
sduringwhichtimethe
oscillatorwillhavevibratedthrough!
0 m=rrad.
Wedefinethequalityfactor
Q¼
!0 m r
asthenumberofradiansthroughwhichthedampedsystemoscillatesasitsenergy
decaysto
E¼E
0e
#1
Ifrissm
all,thenQ
isverylargeand
s m*
r2
4m
2
sothat
!0 +
!0¼
s m
%&
1=2
Thus,wewrite,to
averyclose
approxim
ation,
Q¼
!0m r
whichisaconstantofthedam
ped
system
.
Sincer=m
now
equals!
0=Q
wecanwrite
E¼E
0e
ð#r=mÞt
¼E
0e
#!
0t=Q
Thefact
thatQ
isaconstantð¼
!0m=rÞ
implies
that
theratio
energystoredin
system
energylost
per
cycle
46
DampedSimpleHarmonicMotion

isalso
aconstant,for
Q 2(
¼!
0m
2(r
¼+0m r
isthenumber
ofcycles(orcomplete
oscillations)
throughwhichthesystem
moves
in
decayingto
E¼E
0e
#1
andif
E¼E
0e
ð#r=mÞt
theenergylostper
cycleis
#"E
¼dE dt"t¼
#r
mE1 +0
where"t¼
1=+
0 ¼)
0 ,theperiodofoscillation.
Thus,theratio
energystoredin
system
energylost
per
cycle
¼E
#"E
¼+
0 m r+
+0m r
¼Q 2(
InthenextchapterweshallmeetthesamequalityfactorQin
twoother
roles,thefirstas
ameasure
ofthepower
absorptionbandwidth
ofadam
ped
oscillatordriven
nearits
resonantfrequency
andagainas
thefactorbywhichthedisplacementoftheoscillator
isam
plified
atresonance.
Example
ontheQ-valueofaDamped
Simple
Harm
onic
Oscillator
Anelectronin
anatom
whichis
freely
radiatingpower
behaves
asadam
ped
simple
harmonic
oscillator.
Iftheradiatedpower
isgiven
byP
¼q2!
4x2 0=12("0c3W
atawavelength
of0.6mm
(6000A),showthattheQ-valueoftheatom
isabout108andthatitsfree
radiationlifetime
isabout10
#8s(thetimeforitsenergyto
decay
toe
#1ofitsoriginal
value).
q¼
1:6
,10
#19C
1=4("0¼
9,109mF
#1
me¼
9,10
#31kg
c¼
3,108ms#1
x0¼
maxim
um
amplitudeofoscillation
TheradiatedpowerPis
#+"E,where#"Eistheenergyloss
per
cycle,andtheenergyof
theoscillatorisgiven
byE
¼1 2me!
2x2 0.
MethodsofDescribingtheDampingofanOscillator
47
Thus,Q
¼2(E=#"E
¼+(me!
2x2 0=P
,andinsertingthevalues
abovewith!
¼2(+
¼2(c=-,wherethewavelength
-isgiven,yieldsaQ
valueof-
5,107.
TherelationQ
¼!tgivest,theradiationlifetime,
avalueof-
10
#8s.
Energy
Dissipation
Wehaveseen
that
thepresence
oftheresistiveforcereducestheam
plitudeofoscillation
withtimeas
energyis
dissipated.
Thetotalenergyremainsthesum
ofthekinetic
andpotential
energies
E¼
1 2m_ xx2þ
1 2sx
2
Now,however,dE=dtisnotzero
butnegativebecause
energyis
lost,so
that
dE dt¼
d dtð1 2m_ xx2þ
1 2sx
2Þ¼
_ xxðm€ xxþsx
Þ
¼_ xxð#r_ xxÞ
form_ xxþr_ xxþsx
¼0
i.e.dE=dt¼
#r_ xx2,whichistherateofdoingwork
againstthefrictionalforce(dim
ensions
offorce
,velocity
¼force
,distance/tim
e).
(Problems2.5,2.6)
Damped
SHM
inanElectricalCircuit
Theforceequationin
themechanical
oscillatorisreplacedbythevoltageequationin
the
electrical
circuitofinductance,resistance
andcapacitance
(Figure
2.6).
IR
IR
++
+
++
−−
dI
dt
L
dI
dt
L
q C
q C= 0
−
Figu
re2.6
Electrical
circuitofinductance,capacitance
andresistance
capable
ofdam
ped
simple
harmonic
oscillations.
Thesum
ofthevoltages
aroundthecircuit
isgiven
from
Kirchhoff’s
law
asLdI dtþ
RIþ
q C¼
0
48
DampedSimpleHarmonicMotion

Wehave,
therefore,
LdI dtþRIþq C
¼0
or
L€ qqþR_ qqþq C
¼0
andbycomparisonwiththesolutionsforxin
themechanical
case
weknow
immediately
that
thecharge
q¼q0e
#Rt=2L'
ðR2=4L2#1=LCÞ1
=2t
which,for1=LC>R
2=4L2,gives
oscillatory
behaviourat
afrequency
!2¼
1 LC
#R
2
4L2
From
theexponential
decay
term
weseethatR=L
has
thedim
ensionsofinverse
timeT
#1
or!,so
that
!Lhas
thedim
ensionsofR;that
is,!Lismeasuredin
ohms.
Sim
ilarly,since
!2¼
1=LC;!L
¼1=!C,so
that
1=!C
isalso
measuredin
ohms.
We
shalluse
theseresultsin
thenextchapter.
(Problems2.7,2.8,2.9)
Problem
2.1
Theheavilydam
ped
simple
harmonic
system
ofFigure
2.2
isdisplacedadistanceF
from
its
equilibrium
positionandreleased
from
rest.Show
that
intheexpressionforthedisplacement
x¼
e#pt ðF
coshqtþGsinhqtÞ
where
p¼
r 2m
and
q¼
r2
4m
2#s m
"#
1=2
that
theratio
G F¼
r
ðr2#4msÞ
1=2
Problem
2.2
Verifythat
thesolution
x¼
ðAþBtÞe
#rt=2m
MethodsofDescribingtheDampingofanOscillator
49
satisfies
theequation
m€ xxþr_ xxþsx
¼0
when
r2=4m
2¼s=m
Problem
2.3
Thesolutionfordam
ped
simple
harmonic
motionis
given
by
x¼
e#rt=2mðC
1ei!
0 tþC
2e
#i!
0 tÞ
Ifx¼Acos'att¼
0,findthevalues
ofC
1andC
2to
showthat
_ xx+
#!
0 Asin'att¼
0only
ifr=m
isverysm
allor'
+(=2.
Problem
2.4
AcapacitanceC
withachargeq0att¼
0discharges
througharesistanceR.Use
thevoltage
equationq=C
þIR
¼0to
show
that
therelaxationtimeofthisprocess
isRC
s;that
is,
q¼q0e
#t=RC
(Note
thatt=RC
isnon-dim
ensional.)
Problem
2.5
Thefrequency
ofadam
ped
simple
harmonic
oscillatorisgiven
by
!02
¼s m
#r2
4m
2¼
!2 0#r2
4m
2
(a)If!
2 0#!
02¼
10
#6!
2 0show
thatQ
¼500andthat
thelogarithmic
decrement*¼
(=500.
(b)If!
0¼
106andm
¼10
#10Kgshow
that
thestiffnessofthesystem
is100Nm
#1,andthat
the
resistiveconstantris
2,10
#7N
.sm
#1.
(c)Ifthemaxim
um
displacementatt¼
0is10
#2m,showthattheenergyofthesystem
is5,10
#3
Jandthedecay
toe
#1ofthisvaluetakes
0.5
ms.
(d)Show
that
theenergyloss
inthefirstcycleis
2(
,10
#5J.
Problem
2.6
Show
that
thefractional
changein
theresonantfrequency
!0ð!
2 0¼s=mÞofadam
ped
simple
harmonic
mechanical
oscillatoris
+ð8Q
2Þ#
1whereQ
isthequalityfactor.
Problem
2.7
Show
that
thequalityfactorofan
electrical
LCR
series
circuitisQ
¼!
0L=Rwhere!
2 0¼
1=LC
Problem
2.8
Aplasm
aconsistsofan
ionized
gas
ofionsandelectronsofequal
number
densities
ðni¼ne¼nÞ
havingcharges
ofopposite
sign
'e,
andmassesmiandme,respectively,wheremi>me.Relative
50
DampedSimpleHarmonicMotion

displacementbetweenthetwospeciessetsuparestoring
+ + + + + + + + +
− − − − − − − − −
E
x
l
electric
fieldwhichreturnstheelectronsto
equilibrium,theionsbeingconsidered
stationary.In
the
diagram,aplasm
aslab
ofthicknesslhas
allitselectronsdisplacedadistancexto
givearestoring
electric
fieldE
¼nex="0,where"0is
constant.Show
that
therestoringforceper
unitarea
onthe
electronsisxn2e2l="0andthat
they
oscillate
simple
harmonically
withangularfrequency
!2 e¼
ne2=m
e"0.This
frequency
iscalled
theelectronplasm
afrequency,andonly
those
radio
waves
of
frequency
!>
!ewillpropagatein
such
anionized
medium.Hence
thereflectionofsuch
waves
from
theionosphere.
Problem
2.9
Asimple
pendulum
consistsofamassm
attheendofastringoflengthlandperform
ssm
all
oscillations.
Thelength
isveryslowly
shortened
whilst
thependulum
oscillatesmanytimes
ata
constantam
plitudel.
where.is
verysm
all.Show
that
ifthelength
ischanged
by
#"lthework
doneis
#mg"l(owingto
theelevationofthepositionofequilibrium)together
withan
increase
in
thependulum
energy
"E
¼mg.2 2#ml_ ..2
!
"l
where.2istheaveragevalueof.2duringtheshortening.If.¼
.0cos!t,show
that
theenergyof
thependulum
atanyinstantmay
bewritten
E¼ml2!
2.2 0
2¼mgl.
2 0
2
andhence
show
that
"E E
¼#1 2
"l l¼
"+ +
that
is,E=+,theratiooftheenergyofthependulum
toitsfrequency
ofoscillationremainsconstant
during
the
slowly
changing
process.(This
constantratio
under
slowly
varying
conditionsis
importantin
quantum
theory
wheretheconstantiswritten
asamultiple
ofPlanck’sconstant,h.)
MethodsofDescribingtheDampingofanOscillator
51
Summary
ofIm
portantResults
Damped
Simple
Harm
onic
Motion
Equationofmotionm€ xxþr_ xxþsx
¼0
Oscillationswhen
s m>
r2
4m
2
Displacementx¼Ae
#rt=2mcosð!
0 tþ'Þw
here
!02
¼s m
#r2
4m
2
AmplitudeDecay
Logarithmicdecrement*—
thelogarithm
oftheratiooftwosuccessiveam
plitudes
one
period)
0apart
*¼
loge
An
Anþ1
¼r)
0
2m
RelaxationTime
Tim
eforam
plitudeto
decay
toA
¼A
0e
#rt=2m
¼A
0e
#1;that
is,t¼
2m=r
Energy
Decay
QualityfactorQ
isthenumber
ofradiansduringwhichenergydecreases
toE
¼E
0e
#1
Q¼
!0m r
¼2(energystoredin
system
energylostper
cycle
E¼E
0e
#rt=m
¼E
0e
#1
whenQ
¼!
0t
Indam
ped
SHM
dE dt¼
ðm€ xxþsx
Þ_ xx¼
#r_ xx2
(work
rate
ofresistiveforce)
Forequivalentexpressionsin
electrical
oscillators
replacem
byL,rbyRandsby1=C
.
Forceequationsbecomevoltageequations.
52
DampedSimpleHarmonicMotion

3 TheForced
Oscillator
TheOperationofiuponaVector
Wehavealreadyseenthataharmonicoscillationcanbeconvenientlyrepresentedbythe
formei!
t .Inadditiontoitsmathematicalconvenienceicanalsobeusedasavector
operatorofphysicalsignificance.Wesaythatwheniprecedesoroperatesonavectorthe
directionofthatvectoristurnedthroughapositiveangle(anticlockwise)of!=2,i.e.i
actingasanoperatoradvancesthephaseofavectorby90 .Theoperator!irotatesthe
vectorclockwiseby!=2andretardsitsphaseby90 .Themathematicsofiasanoperator
differsinnowayfromitsuseas
ffiffiffiffiffiffiffi
!1
pandfromnowonitwillplaybothroles.
Thevectorr¼
aþibisshowninFigure3.1,wherethedirectionofbisperpendicularto
thatofabecauseitisprecededbyi.Themagnitudeormodulusorriswritten
r¼
jrj¼
ða2þ
b2Þ1=2
and
r2¼
ða2þ
b2Þ¼
ðaþibÞða!ibÞ¼
rr( ;
whereða
!ibÞ¼
r(isdefinedasthecomplexconjugateofða
þibÞ;thatis,thesignofiis
changed.
Thevectorr(¼
a!ibisalsoshowninFigure3.1.
Thevectorrcanbewrittenasaproductofitsmagnitude
r(scalarquantity)anditsphase
ordirectionintheform(Figure3.1)
r¼
rei$¼
rðcos$þisin$Þ
¼aþib
showingthat
a¼
rcos$and
b¼
rsin$.
The
Physi
cs
of
Vib
rati
ons
and
Waves,6thEditionH.J.Pain
#2005JohnWiley&Sons,Ltd
53
Itfollowsthat
cos$¼
a r¼
a
ða2þ
b2Þ1=2
and
sin$¼
b r¼
b
ða2þ
b2Þ1=2
givingtan$¼
b=a.
Similarly
r(¼
re!i$¼
rðcos$!
isin$Þ
cos$¼
a r;sin$¼
!b randtan$¼
!b a
ðFigure3:1Þ
Thereadershouldconfirmthattheoperatorirotatesavectorby!=2inthepositive
direction(asstatedinthefirstparagraphofp.53)bytaking$¼!=2intheexpression
r¼
rei$¼
rðcos!=2þisin!=2Þ
Notethat$¼
!!=2in
r¼
re!i!=2rotatesthevectorinthenegativedirection.
Vectorform
ofOhm’sLaw
Ohm’sLawisfirstmetasthescalarrelation
V¼
IR,where
Visthevoltageacrossthe
resistance
Rand
Iisthecurrentthroughit.Itsscalarformstatesthatthevoltageandcurrent
arealwaysinphase.Bothwillfollowasinð!
tþ$Þoracosð!
tþ$Þcurve,andthevalue
of$willbethesameforbothvoltageandcurrent.
However,thepresenceofeitherorbothoftheothertwoelectricalcomponents,
inductance
Landcapacitance
C,willintroduceaphasedifferencebetweenvoltageand
r
r*
aa
ib −ib
φ φ
φφr = r
ei φr*
= r
e−i
r c
os
φir cos
φ−ir cos
Figure
3.1
Vectorrepresentationusingioperatorandexponentialindex.Star
superscriptindicates
complexconjugatewhere!ireplacesi
54
The
Forc
ed
Osc
illa
tor

current,andOhm’sLawtakesthevectorform
V¼
IZ
e;
where
Ze,calledthe
impedance,replacestheresistance,andisthevectorsumofthe
effectiveresistancesof
R,
L,and
Cinthecircuit.
Whenanalternatingvoltage
Vaoffrequency!isappliedacrossaresistance,inductance
andcondenserinseriesasinFigure3.2a,thebalanceofvoltagesisgivenby
Va¼
IRþ
LdI
dtþ
q=C
andthecurrentthroughthecircuitisgivenby
I¼
I 0ei!
t .Thevoltageacrosstheinductance
VL¼
LdI
dt¼
Ld dt
I 0ei!
t¼i!
LI 0ei!
t¼i!
LI
But!
L,aswesawattheendofthelastchapter,hasthedimensionsofohms,beingthe
valueoftheeffectiveresistancepresentedbyaninductance
Ltoacurrentoffrequency
!.
Theproduct!
LIwithdimensionsofohmstimescurrent,i.e.volts,isprecededbyi;this
tellsusthatthephaseofthevoltageacrosstheinductanceis90 aheadofthatofthecurrent
throughthecircuit.
Similarly,thevoltageacrossthecondenseris
q C¼1 C
ð
Idt¼1 C
I 0
ð
ei!
tdt¼1
i!C
I 0ei!
t¼
!iI !C
(since1=i¼
!i).
Again1=!
C,measuredinohms,isthevalueoftheeffectiveresistancepresentedbythe
condensertothecurrentoffrequency
!.Now,however,thevoltage
I=!
Cacrossthe
condenserisprecededby!iandthereforelagsthecurrentby90 .Thevoltageandcurrent
acrosstheresistanceareinphaseandFigure3.2bshowsthatthevectorformofOhm’s
Lawmaybewritten
V¼
IZ
e¼
I½Rþið!
L!1=!
CÞ*,wheretheimpedance
Ze¼
Rþið!
L!1=!
CÞ.Thequantities
!Land1=!
Carecalled
reacta
ncesbecausethey
++
+−
−−
IR
I = I
0e
iωt
q C
dI
dt
L
Va
Figure
3.2a
Anelectricalforced
oscillator.ThevoltageVaisapplied
totheseries
LCRcircuitgiving
Va¼
LdI=dtþ
IRþ
q=C
Vecto
rfo
rmof
Ohm
’sLaw
55
introduceaphaserelationshipaswellasaneffectiveresistance,andthebracket
ð!L!1=!
CÞisoftenwritten
Xe,thereactivecomponentofZ
e.
Themagnitude,inohms,i.e.thevalueoftheimpedance,is
Ze¼
R2þ
!L!1 !C
"#
2"
#
1=2
andthevectorZ
emayberepresentedbyitsmagnitudeandphaseas
Ze¼
Zeei$¼
Zeðcos$þisin$Þ
sothat
cos$¼
R Ze
;sin$¼
Xe
Ze
and
tan$¼
Xe=R;
where$isthephasedifferencebetweenthetotalvoltageacrossthecircuitandthecurrent
throughit.
Thevalueof$canbepositiveornegativedependingontherelativevalueof!
Land
1=!
C:when
!L>1=!
C;$ispositive,butthefrequencydependenceofthecomponents
showthat$canchangebothsignandsize.
ThemagnitudeofZ
eisalsofrequencydependentandhasitsminimumvalue
Ze¼
R
when
!L¼1=!
C.
InthevectorformofOhm’sLaw,V¼
IZ
e.IfV¼
V0ei!
tandZ
e¼
Zeei$,thenwehave
I¼
V0ei!
t
Zeei$
¼V0
Ze
eið!
t!$Þ
givingacurrentofamplitude
V0=Z
ewhichlagsthevoltagebyaphaseangle$.
TheIm
pedance
ofaMechanicalCircuit
Exactlysimilarargumentsholdwhenweconsidernotanelectricaloscillatorbuta
mechanicalcircuithavingmass,stiffnessandresistance.
R
iωL
iXe =
i ω
L −
ωC
−i
1
ωC1
i ω
L −
ωC1
φ RZe
Figure
3.2b
Vectoradditionofresistance
andreactancesto
givetheelectrical
impedance
Z e¼
Rþið!
L!1=!CÞ
56
The
Forc
ed
Osc
illa
tor

Themechanicalimpedanceisdefinedastheforcerequiredtoproduceunitvelocityin
theoscillator,i.e.
Zm¼
F=vorF¼
vZ
m.
Immediately,wecanwritethemechanicalimpedanceas
Zm¼
rþi!
m!
s !
&'
¼rþiX
m
where
Zm¼
Zmei$
and
tan$¼
Xm=r
$beingthephasedifferencebetweentheforceandthevelocity.Themagnitudeof
Zm¼
½r2þð!
m!
s=!Þ2*1=2.
Mass,likeinductance,producesapositivereactance,andthestiffnessbehavesinexactly
thesamewayasthecapacitance.
BehaviourofaForced
Oscillator
Wearenowinapositiontodiscussthephysicalbehaviourofamechanicaloscillatorof
mass
m,stiffness
sandresistance
rbeingdrivenbyanalternatingforce
F0cos!
t,where
F0
istheamplitudeoftheforce(Figure3.3).Theequivalentelectricaloscillatorwouldbean
alternatingvoltage
V0cos!
tappliedtothecircuitofinductance
L,capacitance
Cand
resistance
RinFigure3.2a.
Themechanicalequationofmotion,i.e.thedynamicbalanceofforces,isgivenby
m€ xxþ
r_ xxþ
sx¼
F0cos!
t
andthevoltageequationintheelectricalcaseis
L€ qqþ
R_ qqþ
q=C
¼V0cos!
t
Weshallanalysethebehaviourofthemechanicalsystembuttheanalysisfitstheelectrical
oscillatorequallywell.
mr
s
F0 c
os ω
t
Figure
3.3
Mechanical
forced
oscillatorwithforceF 0cos!tapplied
todam
ped
mechanical
circuit
ofFigure
2.1
Behavio
ur
of
aForc
ed
Osc
illa
tor
57
Thecompletesolutionfor
xintheequationofmotionconsistsoftwoterms:
(1)a‘transient’termwhichdiesawaywithtimeandis,infact,thesolutiontotheequation
m€ xxþ
r_ xxþ
sx¼0discussedinChapter2.Thiscontributestheterm
x¼
Ce!
rt=2meiðs=m
!r2=4
m2Þ1=2
t
whichdecayswithe!
rt=2m.Thesecondterm
(2)iscalledthe‘steadystate’term,anddescribesthebehaviouroftheoscillatorafterthe
transienttermhasdiedaway.
Bothtermscontributetothesolutioninitially,butforthemomentweshallconcentrate
onthe‘steadystate’termwhichdescribestheultimatebehaviouroftheoscillator.
Todothisweshallrewritetheforceequationinvectorformandrepresentcos!
tbyei!
t
asfollows:
m€ xxþ
r_ xxþ
sx¼
F0ei!
tð3:1Þ
Solvingforthevectorxwillgivebothitsmagnitudeandphasewithrespecttothedriving
force
F0ei!
t .Initially,letustrythesolutionx¼
Aei!
t ,whereAmaybecomplex,sothatit
mayhavecomponentsinandoutofphasewiththedrivingforce.
Thevelocity
_ xx¼i!
Aei!
t¼i!
x
sothat
€ xx¼i2!2x¼
!!2x
andequation(3.1)becomes ð!
A!2mþi!
Arþ
AsÞei!
t¼
F0ei!
t
whichistrueforall
twhen
A¼
F0
i!rþðs!!2mÞ
or,aftermultiplyingnumeratoranddenominatorby!i
A¼
!iF0
!½rþið!
m!
s=!Þ*¼
!iF0
!Z
m
Hence
x¼
Aei!
t¼
!iF0ei!
t
!Z
m
¼!iF0ei!
t
!Z
mei$
¼!iF0eið!
t!$Þ
!Z
m
58
The
Forc
ed
Osc
illa
tor

where
Zm¼
½r2þð!
m!
s=!Þ2*1=2
Thisvectorformofthe
steady
statebehaviourof
xgivesthreepiecesofinformationand
completelydefinesthemagnitudeofthedisplacement
xanditsphasewithrespecttothe
drivingforceafterthetransienttermdiesaway.Ittellsus
1.Thatthephasedifference$existsbetween
xandtheforcebecauseofthereactivepart
ð!m!
s=!Þofthemechanicalimpedance.
2.Thatanextradifferenceisintroducedbythefactor!iandevenif$werezerothe
displacement
xwouldlagtheforce
F0cos!
tby90 .
3.Thatthemaximumamplitudeofthedisplacement
xis
F0=!
Zm.Weseethatthisis
dimensionallycorrectbecausethevelocity
x=thasdimensions
F0=Z
m.
Havingused
F0ei!
ttorepresentitsrealpart
F0cos!
t,wenowtaketherealpartofthe
solution
x¼
!iF0eið!
t!$Þ
!Z
m
toobtaintheactualvalueofx.(Iftheforcehadbeen
F0sin!
t,wewouldnowtakethatpart
ofxprecededbyi.)
Now
x¼
!iF0
!Z
m
eið!
t!$Þ
¼!iF0
!Z
m
½cosð!
t!$Þþisinð!
t!$Þ*
¼!iF0
!Z
m
cosð!
t!$Þþ
F0
!Z
m
sinð!
t!$Þ
Thevalueof
xresultingfrom
F0cos!
tistherefore
x¼
F0
!Z
m
sinð!
t!$Þ
[thevalueof
xresultingfrom
F0sin!
twouldbe!
F0cosð!
t!$Þ=!
Zm*.
Notethatbothofthesesolutionssatisfytherequirementthatthetotalphasedifference
betweendisplacementandforceis$plusthe!!=2termintroducedbythe!ifactor.When
$¼0thedisplacement
x¼
F0sin!
t=!
Zm
lagstheforce
F0cos!
tbyexactly90 .
Behavio
ur
of
aForc
ed
Osc
illa
tor
59
Tofindthevelocityoftheforcedoscillationinthesteadystatewewrite
v¼
_ xx¼
ði!Þð!iF0Þ
!Z
m
eið!
t!$Þ
¼F0
Zm
eið!
t!$Þ
Weseeimmediatelythat
1.Thereisnoprecedingifactorsothatthevelocity
vandtheforcedifferinphaseonly
by$,andwhen
$¼0thevelocityandforceareinphase.
2.Theamplitudeofthevelocityis
F0=Z
m,whichweexpectfromthedefinitionof
mechanicalimpedance
Zm¼
F=v.
Againwetaketherealpartofthevectorexpressionforthevelocity,whichwill
correspondtotherealpartoftheforce
F0ei!
t .Thisis
v¼
F0
Zm
cosð!
t!$Þ
Thus,the
velo
cit
yis
alw
ays
exactl
y90
ahead
of
the
dis
pla
cem
ent
inphaseanddiffers
fromtheforceonlybyaphaseangle$,where
tan$¼!
m!
s=!
r¼
Xm r
sothataforce
F0cos!
tgivesadisplacement
x¼
F0
!Z
m
sinð!
t!$Þ
andavelocity
v¼
F0
Zm
cosð!
t!$Þ
(Problems3.1,3.2,3.3,3.4)
BehaviourofVelocity
vvin
MagnitudeandPhaseversusDriving
ForceFrequencyx
Thevelocityamplitudeis
F0
Zm
¼F0
½r2þð!
m!
s=!Þ2*1=2
sothatthemagnitudeofthevelocitywillvarywiththefrequency
!because
Zmis
frequencydependent.
60
The
Forc
ed
Osc
illa
tor

Atlowfrequencies,theterm
!s=!isthelargesttermin
Zmandtheimpedanceissaidto
be
stif
fnes
scontr
oll
ed.Athighfrequencies!
misthedominanttermandtheimpedanceis
mass
contr
oll
ed.Atafrequency
!0where!0m¼
s=!0,theimpedancehasitsminimum
value
Zm¼
randisarealquantitywithzeroreactance.
Thevelocity
F0=Z
mthenhasitsmaximumvaluev¼
F0=r,and!0issaidtobethe
frequencyof
velo
cit
yre
sonance.Notethattan$¼0at!0,thevelocityandforcebeingin
phase.
Thevariationofthemagnitudeofthevelocitywithdrivingfrequency,!,isshownin
Figure3.4,theheightandsharpnessofthepeakatresonancedependingon
r,whichisthe
onlyeffectivetermof
Zmat!0.
Theexpression
v¼
F0
Zm
cosð!
t!$Þ
where
tan$¼!
m!
s=!
r
showsthatforpositive$;thatis,!
m>
s=!,thevelocityvwilllagtheforcebecause
!$
appearsintheargumentofthecosine.Whenthedrivingforcefrequency!isveryhighand
!!
1,then
$!90 andthevelocitylagstheforcebythatamount.
When
!m<
s=!;$isnegative,thevelocityisaheadoftheforceinphase,andatlow
drivingfrequenciesas!!0theterm
s=!!
1and$!
!90 .
Thus,atlowfrequenciesthevelocityleadstheforce($negative)andathighfrequencies
thevelocitylagstheforce($positive).
Atthefrequency!0,however,!0m¼
s=!0and$¼0,sothatvelocityandforcearein
phase.Figure3.5showsthevariationof$with!forthevelocity,theactualshapeofthe
curvesdependinguponthevalueof
r.
Velocity
F0 r
ω0 =
(s/m
)
ω1 2
Figure
3.4
Velocity
offorced
oscillatorversusdrivingfrequency!.Maximum
velocityv m
ax¼
F 0=r
at!2 0¼
s=m
Behavio
ur
of
Velo
cit
yv
inM
agnit
ude
and
Phase
vers
us
Dri
vin
gForc
eF
requency!61
(Problem
3.5)
BehaviourofDisplacementversusDrivingForceFrequencyx
Thephaseofthedisplacement
x¼
F0
!Z
m
sinð!
t !Þ
isat
all
tim
esex
actl
y90"
beh
ind
that
of
the
vel
oci
ty.
Whil
stth
egra
ph
of!
ver
sus!
rem
ains
the
sam
e,th
eto
tal
phas
edif
fere
nce
bet
wee
nth
edis
pla
cem
ent
and
the
forc
e
involv
esth
eex
tra
90"
reta
rdat
ion
intr
oduce
dby
the
ioper
ator.
Thus,
atver
ylo
w
freq
uen
cies
,w
her
e!¼ "=2
rad
and
the
vel
oci
tyle
ads
the
forc
e,th
edis
pla
cem
ent
and
the
forc
ear
ein
phas
eas
we
should
expec
t.A
thig
hfr
equen
cies
the
dis
pla
cem
ent
lags
the
forc
eby"
rad
and
isex
actl
yout
of
phas
e,so
that
the
curv
esh
ow
ing
the
phas
ean
gle
bet
wee
nth
edis
pla
cem
entan
dth
efo
rce
iseq
uiv
alen
tto
the!
ver
sus!
curv
e,dis
pla
ced
by
anam
ount
equal
to"=2
rad.
This
issh
ow
nin
Fig
ure
3.6
.
The
ampli
tude
of
the
dis
pla
cem
ent
x¼
F0=!
Zm,
and
atlo
wfr
equen
cies
Zm¼
½r2þð!
m
s=!Þ2'1=2!
s=!
,so
that
x)
F0=ð!
s=!Þ¼
F0=s:
Total phase
angle (radians)
between
x and F
x and F in phase
x lags F by rad
x lags F
π 2
π 2
π 2−
π 2−
0
ω0
r increasing
Phase angle
(red)
φ0
ω
− π
Figu
re3.6
Variationoftotalphaseangle
betweendisplacementanddrivingforceversusdriving
frequency!.Thetotalphaseangle
is ! "=2
rad
Phase angle
(radians)
between
V and F
0 π 2π 2
v leads F
v lags F
r increasing
v and F
in phase
+
ω
φ
−
Figu
re3.5
Variationofphaseangle!versusdrivingfrequency,where!isthephaseanglebetween
thevelocity
oftheforced
oscillatorandthedrivingforce.!¼
0at
velocity
resonance.Each
curve
represents
afixedresistance
value
62
The
Forc
ed
Osc
illa
tor

Athig
hfr
equen
cies
Zm!
!m
,so
that
x)
F0=ð!
2mÞ,
whic
hte
nds
toze
roas!
bec
om
es
ver
yla
rge.
At
ver
yhig
hfr
equen
cies
,th
eref
ore
,th
edis
pla
cem
ent
ampli
tude
isal
most
zero
bec
ause
of
the
mas
s-co
ntr
oll
edor
iner
tial
effe
ct.
The
vel
oci
tyre
sonan
ceocc
urs
at!
2 0¼
s=m
,w
her
eth
eden
om
inat
or
Zm
of
the
vel
oci
ty
ampli
tude
isa
min
imum
,but
the
dis
pla
cem
ent
reso
nan
cew
ill
occ
ur,
since
x¼ðF
0=!
ZmÞ
sinð!
t !Þ,
when
the
den
om
inat
or!
Zm
isa
min
imum
.T
his
takes
pla
cew
hen
d d!ð!
ZmÞ¼
d d!!½r
2þð!
m
s=!Þ2'1=2¼
0
i.e.
when
2!
r2þ
4!
mð!
2m
sÞ¼
0
or
2!½r
2þ
2mð!
2m
sÞ'¼
0
soth
atei
ther
!¼
0
or
!2¼
s m
r2
2m
2¼!
2 0
r2
2m
2
Thus
the
dis
pla
cem
ent
reso
nance
occ
urs
ata
freq
uen
cysl
ightl
yle
ssth
an!
0,
the
freq
uen
cyof
vel
oci
tyre
sonan
ce.
For
asm
all
dam
pin
gco
nst
ant
ror
ala
rge
mas
sm
thes
e
two
reso
nan
ces,
for
all
pra
ctic
alpurp
ose
s,occ
ur
atth
efr
equen
cy!
0.
Den
oti
ng
the
dis
pla
cem
ent
reso
nan
cefr
equen
cyby
!r¼
s m
r2
2m
2
!
1=2
we
can
wri
teth
em
axim
um
dis
pla
cem
ent
as
xm
ax¼
F0
!rZ
m
The
val
ue
of!
rZ
mat!
ris
easi
lysh
ow
nto
be
equal
to!0 r
wher
e
!02¼
s m
r2
4m
2¼!
2 0
r2
4m
2
The
val
ue
of
xat
dis
pla
cem
ent
reso
nan
ceis
ther
efore
giv
enby
xm
ax¼
F0
!0 r
wher
e
!0 ¼
!2 0
r2
4m
2
!
1=2
Behavio
ur
of
Dis
pla
cem
ent
vers
us
Dri
vin
gForc
eF
requencyx
63
Sin
cex
max¼
F0=!0 r
atre
sonan
ce,th
eam
pli
tude
atre
sonan
ceis
kep
tlo
wby
incr
easi
ng
ran
dth
evar
iati
on
of
xw
ith!
for
dif
fere
ntval
ues
of
ris
show
nin
Fig
ure
3.7
.A
neg
ligib
le
val
ue
of
rpro
duce
sa
larg
eam
pli
fica
tion
atre
sonan
ce:th
isis
the
bas
isof
hig
hse
lect
ivit
yin
atu
ned
radio
circ
uit
(see
the
sect
ion
inth
isch
apte
ron
Qas
anam
pli
fica
tion
fact
or)
.
Kee
pin
gth
ere
sonan
ceam
pli
tude
low
isth
epri
nci
ple
of
vib
rati
on
insu
lati
on.
(Problems3.6,3.7)
Problem
onVibrationInsu
lation
Aty
pic
alvib
rati
on
insu
lato
ris
show
nin
Fig
ure
3.8
.A
hea
vy
bas
eis
support
edon
a
vib
rati
ng
floor
by
asp
ring
syst
emof
stif
fnes
ss
and
vis
cous
dam
per
r.T
he
insu
lato
rw
ill
gen
eral
lyoper
ate
atth
em
ass
contr
oll
eden
dof
the
freq
uen
cysp
ectr
um
and
the
reso
nan
t
freq
uen
cyis
des
igned
tobe
low
erth
anth
era
nge
of
freq
uen
cies
likel
yto
be
met
.Suppose
the
ver
tica
lvib
rati
on
of
the
floor
isgiv
enby
x¼
Aco
s!
tab
outit
seq
uil
ibri
um
posi
tion
and
yis
the
corr
espondin
gver
tica
ldis
pla
cem
entof
the
bas
eab
outit
sre
stposi
tion.T
he
funct
ion
of
the
insu
lato
ris
tokee
pth
era
tio
y=A
toa
min
imum
.
The
equat
ion
of
moti
on
isgiv
enby
m€ yy¼
rð_ yy
_ xxÞ
sðy
xÞ
ωω0
F0
S
Displacement x
r increasing
Figu
re3.7
Variationofthedisplacementofaforced
oscillatorversusdrivingforcefrequency!for
variousvalues
of
r
64
The
Forc
ed
Osc
illa
tor

whic
h,
ify
x¼
X,
bec
om
es
m€ XXþ
r_ XXþ
sX¼
m€ xx¼
mA!
2co
s!
t
¼F
0co
s!
t;
wher
e
F0¼
mA!
2
Use
the
stea
dy
stat
eso
luti
on
of
Xto
show
that
y¼
F0
!Z
m
sinð!
t !Þþ
Aco
s!
t
and
(noti
ng
that
yis
the
super
posi
tion
of
two
har
monic
com
ponen
tsw
ith
aco
nst
ant
phas
e
dif
fere
nce
)sh
ow
that
ym
ax
A¼ðr
2þ
s2=!
2Þ1=2
Zm
wher
e
Z2 m¼
r2þð!
m
s=!Þ2
Note
that
ym
ax
A>
1if
!2<
2s m
r
y
Vibrating floor
x = A cos ωt
Fixed reference level
Heavy base
Equilibrium
rest position
of base
Figu
re3.8
Vibrationinsulator.Aheavy
basesupported
byaspringandviscousdam
per
system
ona
vibratingfloor
Pro
ble
mon
Vib
rati
on
Insu
lati
on
65
soth
ats=
msh
ould
be
aslo
was
poss
ible
togiv
epro
tect
ion
agai
nst
agiv
enfr
equen
cy!.
(a)
Show
that
ym
ax
A¼
1fo
r!
2¼
2s m
(b)
Show
that
ym
ax
A<
1fo
r!
2>
2s m
(c)
Show
that
if!
2¼
s=m
,th
eny
max=A
>1
but
that
the
dam
pin
gte
rmr
ishel
pfu
lin
kee
pin
gth
em
oti
on
of
the
bas
eto
are
asonab
lylo
wle
vel
.
(d)
Show
that
if!
2>
2s=
m,
then
ym
ax=A
<1
but
dam
pin
gis
det
rim
enta
l.
Sign
ifican
ceoftheTw
oCo
mponen
tsoftheDisplace
men
tCu
rve
Any
single
curv
eof
Fig
ure
3.7
isth
esu
per
posi
tion
of
the
two
com
ponen
tcu
rves
(a)
and
(b)
inFig
ure
3.9
,fo
rth
edis
pla
cem
ent
xm
aybe
rew
ritt
en
x¼
F0
!Z
m
sinð!
t !Þ¼
F0
!Z
m
ðsin!
tco
s!
cos!
tsi
n!Þ
(b)F0ω
ω
r
r
r 2+Xm
2
2m
(a)
F0ω
ω0
ω0
ω0
r 2+
+
Xm
2
Xm
F0 l ω
′r
F0 l ω
0r
F0 l 2ω0r F0
S
r2m
−
−
Figu
re3.9
AtypicalcurveofFigure
3.7
resolved
into
its‘anti-phase’component(curve(a))andits
‘90"outofphase’
component(curve
(b)).Curve
(b)represents
the
resistive
fraction
ofthe
impedance
andcurve(a)thereactive
fraction.Curve(b)correspondsto
absorptionandcurve(a)to
anomalousdispersionofan
electromagneticwaveinamediumhavingan
atomicormolecularresonant
frequency
equal
tothefrequency
ofthewave
66
The
Forc
ed
Osc
illa
tor

or,
since
cos!¼
r Zm
and
sin!¼
Xm
Zm
as
x¼
F0
!Z
m
r Zm
sin!
t
F0
!Z
m
Xm
Zm
cos!
t
The
cos!
tco
mponen
t(w
ith
aneg
ativ
esi
gn)
isex
actl
yan
ti-p
has
ew
ith
resp
ect
toth
e
dri
vin
gfo
rce
F0
cos!
t.It
sam
pli
tude,
plo
tted
ascu
rve
(a)
may
be
expre
ssed
as
F
0 !
Xm
Z2 m
¼F
0mð!
2 0 !
2Þ
m2ð!
2 0 !
2Þ2þ!
2r
2ð3:2Þ
wher
e!
2 0¼
s=m
and!
0is
the
freq
uen
cyof
vel
oci
tyre
sonan
ce.
The
sin!
tco
mponen
tla
gs
the
dri
vin
gfo
rce
F0
cos!
tby
90" .
Its
ampli
tude
plo
tted
as
curv
e(b
)bec
om
es
F0 !
r
r2þ
X2 m
¼F
0!
r
m2ð!
2 0 !
2Þ2þ!
2r
2
We
see
imm
edia
tely
that
at!
0cu
rve
(a)
isze
roan
dcu
rve
(b)
isnea
rit
sm
axim
um
butth
ey
com
bin
eto
giv
ea
max
imum
at!
wher
e
!2¼!
2 0
r2
2m
2
the
reso
nan
tfr
equen
cyfo
ram
pli
tude
dis
pla
cem
ent.
Thes
ecu
rves
are
par
ticu
larl
yfa
mil
iar
inth
est
udy
of
opti
caldis
per
sion
wher
eth
efo
rced
osc
illa
tor
isan
elec
tron
inan
atom
and
the
dri
vin
gfo
rce
isth
eosc
illa
ting
fiel
dvec
tor
of
an
elec
trom
agnet
icw
ave
of
freq
uen
cy!.W
hen
!is
the
reso
nan
tfr
equen
cyof
the
elec
tron
in
the
atom
,th
eat
om
abso
rbs
ala
rge
amount
of
ener
gy
from
the
elec
trom
agnet
icw
ave
and
curv
e(b
)is
the
shap
eof
the
char
acte
rist
icab
sorp
tion
curv
e.N
ote
that
curv
e(b
)re
pre
sents
the
dis
sipat
ing
or
abso
rbin
gfr
acti
on
of
the
imped
ance
r
ðr2þ
X2 mÞ1=2
and
that
par
tof
the
dis
pla
cem
ent
whic
hla
gs
the
dri
vin
gfo
rce
by
90" .
The
vel
oci
ty
asso
ciat
edw
ith
this
com
ponen
tw
ill
ther
efore
be
inphas
ew
ith
the
dri
vin
gfo
rce
and
itis
this
par
tof
the
vel
oci
tyw
hic
hap
pea
rsin
the
ener
gy
loss
term
r_ xx
2due
toth
ere
sist
ance
of
the
osc
illa
tor
and
whic
hgiv
esri
seto
abso
rpti
on.
Sig
nifi
cance
of
the
Tw
oC
om
ponents
of
the
Dis
pla
cem
ent
Curv
e67
On
the
oth
erhan
d,
curv
e(a
)re
pre
sents
the
reac
tive
or
ener
gy
stori
ng
frac
tion
of
the
imped
ance
Xm
ðr2þ
X2 mÞ1=2
and
the
reac
tive
com
ponen
tsin
am
ediu
mdet
erm
ine
the
vel
oci
tyof
the
wav
esin
the
med
ium
whic
hin
turn
gover
ns
the
refr
active
index
n.In
fact
,cu
rve
(a)
isa
gra
ph
of
the
val
ue
of
n2
ina
regio
nof
anom
alous
dis
per
sion
wher
eth
e!
axis
repre
sents
the
val
ue
n¼
1.
Thes
ere
gio
ns
occ
ur
atev
ery
reso
nan
tfr
equen
cyof
the
const
ituen
tat
om
sof
the
med
ium
.W
esh
all
retu
rnto
this
topic
late
rin
the
book.
(Problems3.8,3.9,3.10)
Power
Supplied
toOscillatorbytheDrivingFo
rce
Inord
erto
mai
nta
inth
est
eady
stat
eosc
illa
tions
of
the
syst
emth
edri
vin
gfo
rce
must
repla
ceth
een
ergy
lost
inea
chcy
cle
bec
ause
of
the
pre
sence
of
the
resi
stan
ce.
We
shal
l
now
der
ive
the
most
import
ant
resu
ltth
at:
‘in
the
stea
dy
stat
eth
eam
pli
tude
and
phas
eof
adri
ven
osc
illa
tor
adju
stth
emse
lves
so
that
the
aver
age
pow
ersu
ppli
edby
the
dri
vin
gfo
rce
just
equal
sth
atbei
ng
dis
sipat
edby
the
fric
tional
forc
e’.
The
inst
anta
neous
pow
er
Psu
ppli
edis
equal
toth
epro
duct
of
the
inst
anta
neous
dri
vin
g
forc
ean
dth
ein
stanta
neous
velo
cit
y;
that
is,
P¼
F0
cos!
tF
0
Zm
cosð!
t !Þ
¼F
2 0
Zm
cos!
tco
sð!
t !Þ
The
avera
ge
pow
er
Pav¼
tota
lw
ork
per
osc
illa
tion
osc
illa
tion
per
iod
;P
av¼ð
T 0
Pdt
Tw
her
eT¼
osc
illa
tion
per
iod
¼F
2 0
ZmT
ð
T 0
cos!
tco
sð!
t !Þd
t
¼F
2 0
ZmT
ð
T 0
½cos
2!
tco
s!þ
cos!
tsi
n!
tsi
n!Þd
t
¼F
2 0
2Z
m
cos!
68
The
Forc
ed
Osc
illa
tor

bec
ause
ð
T 0
cos!
t+
sin!
tdt¼
0
and
1 T
ð
T 0
cos
2!
tdt¼
1 2
The
pow
ersu
ppli
edby
the
dri
vin
gfo
rce
isnot
store
din
the
syst
em,
but
dis
sipat
edas
work
expen
ded
inm
ovin
gth
esy
stem
agai
nst
the
fric
tional
forc
er_ xx.
The
rate
of
work
ing
(inst
anta
neo
us
pow
er)
by
the
fric
tional
forc
eis
ðr_ xxÞ_ xx¼
r_ xx
2¼
rF
2 0
Z2 m
cos
2ð!
t !Þ
and
the
aver
age
val
ue
of
this
over
one
per
iod
of
osc
illa
tion
1 2
rF2 0
Z2 m
¼1 2
F2 0
Zm
cos!
for
r Zm
¼co
s!
This
pro
ves
the
init
ial
stat
emen
tth
atth
epow
ersu
ppli
edeq
ual
sth
epow
erdis
sipat
ed.
Inan
elec
tric
alci
rcuit
the
pow
eris
giv
enby
VIco
s!,w
her
eV
and
Iar
eth
ein
stan
taneo
us
r.m
.s.
val
ues
of
volt
age
and
curr
ent
and
cos!
isknow
nas
the
pow
er
facto
r.
VIco
s!¼
V2
Ze
cos!¼
V2 0
2Z
e
cos!
since
V¼
V0 ffiffiffi 2
p
(Problem
3.11)
VariationofPav
withx.Abso
rptionRes
onan
ceCu
rve
Ret
urn
ing
toth
em
echan
ical
case
,w
ese
eth
atth
eav
erag
epow
ersu
ppli
ed
Pav¼ðF
2 0=2
ZmÞc
os!
isa
max
imum
when
cos!¼
1;
that
is,w
hen
!¼
0an
d!
m
s=!¼
0or!
2 0¼
s=m
.T
he
forc
ean
dth
evel
oci
tyar
eth
enin
phas
ean
dZ
mhas
its
min
imum
val
ue
of
r.T
hus
Pav
(max
imum
)¼
F2 0=2r
Vari
ati
on
of
Pav
wit
h!
.A
bso
rpti
on
Res
onan
ceC
urv
e69
Agra
ph
of
Pav
ver
sus!
,th
efr
equen
cyof
the
dri
vin
gfo
rce,
issh
ow
nin
Fig
ure
3.1
0.L
ike
the
curv
eof
dis
pla
cem
ent
ver
sus!
,th
isgra
ph
mea
sure
sth
ere
sponse
of
the
osc
illa
tor;
the
shar
pnes
sof
its
pea
kat
reso
nan
ceis
also
det
erm
ined
by
the
val
ue
of
the
dam
pin
gco
nst
ant
r,w
hic
his
the
only
term
rem
ainin
gin
Zm
atth
ere
sonan
cefr
equen
cy!
0.T
he
pea
kocc
urs
atth
efr
equen
cyof
vel
oci
tyre
sonan
cew
hen
the
pow
erab
sorb
edby
the
syst
emfr
om
the
dri
vin
gfo
rce
isa
max
imum
;th
iscu
rve
isknow
nas
the
abso
rpti
on
curv
eof
the
osc
illa
tor
(it
issi
mil
arto
curv
e(b
)of
Fig
ure
3.9
).
TheQ-Valuein
Term
softheRes
onan
ceAbso
rptionBan
dwidth
Inth
ela
stch
apte
rw
edis
cuss
edth
equal
ity
fact
or
of
anosc
illa
tor
syst
emin
term
sof
ener
gy
dec
ay.W
em
ayder
ive
the
sam
epar
amet
erin
term
sof
the
curv
eof
Fig
ure
3.1
0,w
her
eth
e
shar
pnes
sof
the
reso
nan
ceis
pre
cise
lydefi
ned
by
the
rati
o
Q¼
!0
!2 !
1
;
wher
e!
2an
d!
1ar
eth
ose
freq
uen
cies
atw
hic
hth
epow
ersu
ppli
ed
Pav¼
1 2P
av(m
axim
um
)
The
freq
uen
cydif
fere
nce
!2 !
1is
oft
enca
lled
the
ban
dw
idth
.
ω0
ω2
ωω1
F 02
Pav(max)
2r
4r
=
F 02
Figu
re3.10
Graph
ofaveragepower
versus!
supplied
toan
oscillatorbythedrivingforce.
Bandwidth
!2 !1ofresonance
curve
defines
response
interm
softhe
quality
factor,
Q¼
!0=ð!2 !1Þ,
where!
2 0¼
s=m
70
The
Forc
ed
Osc
illa
tor

Now
Pav¼
rF2 0=2
Z2 m¼
1 2P
av(m
axim
um
)¼
1 2F
2 0=2
r
when
Z2 m¼
2r
2
that
is,
when
r2þ
X2 m¼
2r
2or
Xm¼!
m
s=!¼-
r:
If!
2>!
1,
then
!2m
s=!
2¼þ
r
and
!1m
s=!
1¼
r
Eli
min
atin
gs
bet
wee
nth
ese
equat
ions
giv
es
!2 !
1¼
r=m
soth
at
Q¼!
0m=r
Note
that!
1¼!
0
r=2m
and!
2¼!
0þ
r=2m
are
the
two
signifi
cant
freq
uen
cies
in
Fig
ure
3.9
.T
he
qual
ity
fact
or
of
anel
ectr
ical
circ
uit
isgiv
enby
Q¼!
0L
R;
wher
e
!2 0¼ðL
CÞ
1
Note
that
for
hig
hval
ues
of
Q,
wher
eth
edam
pin
gco
nst
ant
ris
smal
l,th
efr
equen
cy!0
use
din
the
last
chap
ter
todefi
ne
Q¼!0 m=r
moves
ver
ycl
ose
toth
efr
equen
cy!
0,an
dth
e
two
defi
nit
ions
of
Qbec
om
eeq
uiv
alen
tto
each
oth
eran
dto
the
thir
ddefi
nit
ion
we
mee
tin
the
nex
tse
ctio
n.
TheQ-Valueas
anAmplificationFa
ctor
We
hav
ese
enth
atth
eval
ue
of
the
dis
pla
cem
ent
atre
sonan
ceis
giv
enby
Am
ax¼
F0
!0 r
wher
e!02¼
s m
r2
4m
2
The
Q-V
alu
eas
an
Am
pli
ficati
on
Facto
r71
At
low
freq
uen
ciesð!!
0Þt
he
dis
pla
cem
ent
has
aval
ue
A0¼
F0=s
,so
that
Am
ax
A0
!
2
¼F
2 0
!02
r2
s2
F2 0
¼m
2!
4 0
r2½!
2 0
r2=4
m2'
¼!
2 0m
2
r2½1
1=4
Q2'1=2'¼
Q2
½1
1=4
Q2'
Hen
ce:
Am
ax
A0
¼Q
½1
1=4
Q2'1=2)
Q1þ
1
8Q
2
$%
)Q
for
larg
eQ
.
Q = 5
Q = 4
Q = 3
Q = 2
ω0
F0
ω
SF0S
Displacement in units of
Figu
re3.11
Curves
ofFigure
3.7
nowgiven
interm
softhequalityfactor
Qofthesystem
,where
Q
isam
plificationat
resonance
oflowfrequency
response
x¼
F 0=s
72
The
Forc
ed
Osc
illa
tor

Thus,
the
dis
pla
cem
ent
atlo
wfr
equen
cies
isam
pli
fied
by
afa
ctor
of
Qat
dis
pla
cem
ent
reso
nan
ce.
Fig
ure
3.7
isnow
show
nas
Fig
ure
3.1
1w
her
eth
eQ
-val
ues
hav
ebee
nat
tach
edto
each
curv
e.In
tunin
gra
dio
circ
uit
s,th
eQ
-val
ue
isuse
das
am
easu
reof
sele
ctiv
ity,
wher
e
the
shar
pnes
sof
resp
onse
allo
ws
asi
gnal
tobe
obta
ined
free
from
inte
rfer
ence
from
signal
s
atnea
rby
freq
uen
cies
.In
conven
tional
radio
circ
uit
sat
freq
uen
cies
of
one
meg
acycl
e,
Transient
vecto
r
A2
A3
A4
A0A1
A2
A3
A4
A1
BOB
Steady state vector
0
(b)
(a)
At t = 0 , transient vector = BO = BA0
t = 0
t
Figu
re3.12
(a)Thesteadystateoscillation(heavy
curve)
ismodulatedbythetransientwhich
decaysexponentially
withtime.
(b)In
thevectordiagram
of(b)OBis
theconstantlength
steady
statevectorandBA1isthetransientvector.Each
vectorrotatesanti-clockwisewithitsownangular
velocity.At
t¼
0thevectors
OBandBA0areequal
andopposite
onthehorizontalaxis
andtheir
vectorsumiszero.Atsubsequenttimes
thetotalam
plitudeisthelength
ofOA1whichchangesas
A
traces
acontractingspiral
aroundB.Thepoints
A1,A2,A3andA4indicatehowtheam
plitudeis
modifiedin
(a)
The
Q-V
alu
eas
an
Am
pli
ficati
on
Facto
r73
Q-v
alues
are
of
the
ord
erof
afe
whundre
d;
athig
her
radio
freq
uen
cies
reso
nan
tco
pper
cavit
ies
hav
eQ
-val
ues
of
about30
000
and
pie
zo-e
lect
ric
cryst
als
can
pro
duce
Q-v
alues
of
500
000.
Opti
cal
abso
rpti
on
incr
yst
als
and
nucl
ear
mag
net
icre
sonan
ces
are
oft
en
des
crib
edin
term
sof
Q-v
alues
.T
he
Moss
bau
eref
fect
innucl
ear
physi
csin
volv
esQ
-val
ues
of
10
10.
TheEffect
oftheTran
sien
tTerm
Thro
ughout
this
chap
ter
we
hav
eco
nsi
der
edonly
the
stea
dy
stat
ebeh
avio
ur
wit
hout
acco
unti
ng
for
the
tran
sien
tte
rmm
enti
oned
on
p.
58.
This
term
mak
esan
init
ial
contr
ibuti
on
toth
eto
tal
dis
pla
cem
ent
but
dec
ays
wit
hti
me
ase
rt=2m.
Its
effe
ctis
bes
t
dis
pla
yed
by
consi
der
ing
the
vec
tor
sum
of
the
tran
sien
tan
dst
eady
stat
eco
mponen
ts.
The
stea
dy
stat
ete
rmm
aybe
repre
sente
dby
avec
tor
of
const
ant
length
rota
ting
anti
clock
wis
eat
the
angula
rvel
oci
ty!
of
the
dri
vin
gfo
rce.
The
vec
tor
tip
trac
esa
circ
le.
Upon
this
issu
per
pose
dth
etr
ansi
ent
term
vec
tor
of
dim
inis
hin
gle
ngth
whic
hro
tate
san
ti
clock
wis
ew
ith
angula
rvel
oci
ty!0 ¼
ðs=m
r2=4
m2Þ1=2.It
sti
ptr
aces
aco
ntr
acti
ng
spir
al.
The
locu
sof
the
mag
nit
ude
of
the
vec
tor
sum
of
thes
ete
rms
isth
een
vel
ope
of
the
var
yin
gam
pli
tudes
of
the
osc
illa
tor.
This
envel
ope
modula
tes
the
stea
dy
stat
eosc
illa
tions
of
freq
uen
cy!
ata
freq
uen
cyw
hic
hdep
ends
upon!0
and
the
rela
tive
phas
ebet
wee
n!
t
and!0 t.
Thus,
inFig
ure
3.1
2(a
)w
her
eth
eto
tal
osc
illa
tor
dis
pla
cem
ent
isze
roat
tim
et¼
0w
e
hav
eth
est
eady
stat
ean
dtr
ansi
entvec
tors
equal
and
opposi
tein
Fig
ure
3.1
2(b
)butbec
ause
!6¼!0
the
rela
tive
phas
ebet
wee
nth
evec
tors
wil
lch
ange
asth
etr
ansi
ent
term
dec
ays.
The
vec
tor
tip
of
the
tran
sien
tte
rmis
show
nas
the
dott
edsp
iral
and
the
tota
lam
pli
tude
assu
mes
the
var
yin
gle
ngth
sO
A1,
OA
2,
OA
3,
OA
4,
etc.
(Problems3.12,3.13,3.14,3.15,3.16,3.17,3.18)
Problem
3.1
Show
,if
F0
ei!
tre
pre
sents
F0
sin!
tin
the
vec
tor
form
of
the
equat
ion
of
motion
for
the
forc
ed
osc
illa
tor
that
x¼
F0
!Z
m
cosð!
t !Þ
and
the
vel
oci
ty
v¼
F0
Zm
sinð!
t !Þ
Problem
3.2
The
dis
pla
cem
entof
afo
rced
osc
illa
tor
isze
roat
tim
et¼
0an
dits
rate
of
gro
wth
isgover
ned
by
the
rate
of
dec
ayof
the
tran
sien
tte
rm.
Ifth
iste
rmdec
ays
toe
kof
its
ori
gin
alval
ue
ina
tim
et
show
that
,fo
rsm
alldam
pin
g,th
eav
erag
era
teof
gro
wth
of
the
osc
illa
tions
isgiv
enby
x0=t¼
F0=2k
m!
0
wher
ex
0is
the
max
imum
stea
dy
stat
edis
pla
cem
ent,
F0
isth
efo
rce
amplitu
de
and!
2 0¼
s=m
.
74
The
Forc
ed
Osc
illa
tor

Problem
3.3
The
equat
ion
m€ xxþ
sx¼
F0
sin!
tdes
crib
esth
em
otion
of
anundam
ped
sim
ple
har
monic
osc
illa
tor
dri
ven
by
afo
rce
of
freq
uen
cy!.Show
,by
solv
ing
the
equat
ion
invec
tor
form
,th
atth
est
eady
stat
e
solu
tion
isgiv
enby
x¼
F0
sin!
t
mð!
2 0 !
2Þ
wher
e!
2 0¼
s m
Sket
chth
ebeh
avio
ur
of
the
amplitu
de
of
xver
sus!
and
note
that
the
chan
ge
of
sign
as!
pas
ses
thro
ugh!
0defi
nes
aphas
ech
ange
of"
rad
inth
edis
pla
cem
ent.
Now
show
that
the
gen
eral
solu
tion
for
the
dis
pla
cem
ent
isgiv
enby
x¼
F0
sin!
t
mð!
2 0 !
2Þþ
Aco
s!
0tþ
Bsi
n!
0t
wher
eA
and
Bar
eco
nst
ant.
Problem
3.4
Inpro
ble
m3.3
,if
x¼
_ xx¼
0at
t¼
0sh
ow
that
x¼
F0
m
1
ð!2 0 !
2Þ
sin!
t
! !0
sin!
0t
!
and,
by
wri
ting!¼!
0þ"!
wher
e"!=!
0/
1an
d"!
t/
1,
show
that
nea
rre
sonan
ce,
x¼
F0
2m!
2 0
ðsin!
0t !
0tco
s!
0tÞ
Sket
chth
isbeh
avio
ur,
noting
that
the
seco
nd
term
incr
ease
sw
ith
tim
e,al
low
ing
the
osc
illa
tions
to
gro
w(r
esonan
cebet
wee
nfr
eean
dfo
rced
osc
illa
tions)
.N
ote
that
the
conditio
n"!
t/
1fo
cuse
s
atte
ntion
on
the
tran
sien
t.
Problem
3.5
What
isth
egen
eral
expre
ssio
nfo
rth
eac
cele
ration
_ vvof
asi
mple
dam
ped
mec
han
ical
osc
illa
tor
dri
ven
by
afo
rce
F0
cos!
t?D
eriv
ean
expre
ssio
nto
giv
eth
efr
equen
cyof
max
imum
acce
lera
tion
and
show
that
ifr¼
ffiffiffiffiffiffi
smp
,th
enth
eac
cele
ration
amplitu
de
atth
efr
equen
cyof
vel
oci
tyre
sonan
ce
equal
sth
elim
itof
the
acce
lera
tion
amplitu
de
athig
hfr
equen
cies
.
Problem
3.6
Pro
ve
that
theexact
amplitu
de
atth
edis
pla
cem
ent
reso
nan
ceof
adri
ven
mec
han
ical
osc
illa
tor
may
be
wri
tten
x¼
F0=!0 r
wher
eF
0is
the
dri
vin
gfo
rce
amplitu
de
and
!02¼
s m
r2
4m
2
Problem
3.7
Ina
forc
edm
echan
ical
osc
illa
tor
show
that
the
follow
ing
are
freq
uen
cyin
dep
enden
t(a
)th
e
dis
pla
cem
ent
amplitu
de
atlo
wfr
equen
cies
(b)
the
vel
oci
tyam
plitu
de
atvel
oci
tyre
sonan
cean
d(c
)
the
acce
lera
tion
amplitu
de
athig
hfr
equen
cies
,ð!!1Þ.
The
Effect
of
the
Tra
nsi
ent
Term
75
Problem
3.8
InFig
ure
3.9
show
that
for
smal
lr,
the
max
imum
val
ue
of
curv
e(a
)is)
F0=2!
0r
at
!1¼!
0
r=2m
and
its
min
imum
val
ue
is)
F0=2!
0r
at!
2¼!
0þ
r=2m
.
Problem
3.9
The
equat
ion€ xxþ!
2 0x¼ð
eE
0=mÞc
os!
tdes
crib
esth
em
otion
of
abound
undam
ped
elec
tric
char
ge
eof
mas
sm
under
the
influen
ceof
anal
tern
atin
gel
ectr
icfiel
dE¼
E0
cos!
t.For
an
elec
tron
num
ber
den
sity
nsh
ow
that
the
induce
dpola
riza
bility
per
unit
volu
me
(the
dynam
ic
susc
eptibility)
of
am
ediu
m
)e¼
nex
"0E¼
ne
2
"0mð!
2 0 !
2Þ
(The
per
mittivity
of
am
ediu
mis
defi
ned
as"¼"
0ð1þ)Þw
her
e"
0is
the
per
mittivity
of
free
spac
e.
The
rela
tive
per
mittivity"
r¼"="
0is
called
the
die
lect
ric
const
antan
dis
the
squar
eof
the
refr
active
index
when
Eis
the
elec
tric
fiel
dof
anel
ectr
om
agnet
icw
ave.
)
Problem
3.10
Rep
eatPro
ble
m3.9
for
the
case
of
adam
ped
osc
illa
tory
elec
tron,by
takin
gth
edis
pla
cem
entx
asth
e
com
ponen
tre
pre
sente
dby
curv
e(a
)in
Fig
ure
3.9
tosh
ow
that
"r¼
1þ)¼
1þ
ne
2mð!
2 0 !
2Þ
"0½m
2ð!
2 0 !
2Þ2þ!
2r
2'
Infa
ct,
Fig
ure
3.9
(a)
plo
ts"
r¼"="
0.
Note
that
for
!/
!0;
"r)
1þ
ne
2
"0m!
2 0
and
for
!1
!0;
"r)
1
ne
2
"0m!
2
Problem
3.11
Show
that
the
ener
gy
dis
sipat
edper
cycl
eby
the
fric
tional
forc
er_ xx
atan
angula
rfr
equen
cy!
isgiv
en
by"r!
x2 m
ax.
Problem
3.12
Show
that
the
ban
dw
idth
of
the
reso
nan
ceab
sorp
tion
curv
edefi
nes
the
phas
ean
gle
range
tan!¼-
1.
Problem
3.13
An
alte
rnat
ing
voltag
e,am
plitu
de
V0
isap
plied
acro
ssan
LC
Rse
ries
circ
uit.Show
that
the
voltag
eat
curr
ent
reso
nan
ceac
ross
eith
erth
ein
duct
ance
or
the
conden
ser
isQ
V0.
76
The
Forc
ed
Osc
illa
tor

Problem
3.14
Show
that
ina
reso
nan
tLC
Rse
ries
circ
uit
the
max
imum
pote
ntial
acro
ssth
eco
nden
ser
occ
urs
ata
freq
uen
cy!¼!
0ð1
1=2Q
2 0Þ1=2
wher
e!
2 0¼ðL
CÞ
1an
dQ
0¼!
0L=R
.
Problem
3.15
InPro
ble
m3.1
4sh
ow
that
the
max
imum
pote
ntial
acro
ssth
ein
duct
ance
occ
urs
ata
freq
uen
cy
!¼!
0ð1
1=2Q
2 0Þ
1=2.
Problem
3.16
Lig
ht
of
wav
elen
gth
0.6mm
(6000
A)
isem
itte
dby
anel
ectr
on
inan
atom
beh
avin
gas
alightly
dam
ped
sim
ple
har
monic
osc
illa
tor
with
aQ
-val
ue
of
5+
10
7.Show
from
the
reso
nan
ceban
dw
idth
that
the
wid
thof
the
spec
tral
line
from
such
anat
om
is1:2+
10
14
m.
Problem
3.17
Ifth
eQ
-val
ue
of
Pro
ble
m3.6
ishig
hsh
ow
that
the
wid
thof
the
dis
pla
cem
ent
reso
nan
cecu
rve
is
appro
xim
atel
yffiffiffi 3
pr=
mw
her
eth
ew
idth
ism
easu
red
bet
wee
nth
ose
freq
uen
cies
wher
ex¼
xm
ax=2.
Problem
3.18
Show
that
,in
Pro
ble
m3.1
0,th
em
ean
rate
of
ener
gy
abso
rption
per
unit
volu
me;
that
is,th
epow
er
supplied
is
P¼
ne
2E
2 0
2
!2r
m2ð!
2 0 !
2Þ2þ!
2r
2
Summary
ofIm
portantResults
Mec
han
ical
Imped
ance
Zm¼
F=v
(forc
eper
unit
vel
oci
ty)
Zm¼
Zm
ei!¼
rþ
ið!m
s=!Þ
wher
eZ
2 m¼
r2þð!
m
s=!Þ2
sin!¼!
m
s=!
Zm
;co
s!¼
r Zm
;ta
n!¼!
m
s=!
r
!is
the
phas
ean
gle
bet
wee
nth
efo
rce
and
vel
oci
ty.
Forc
edOsc
illa
tor
Equat
ion
of
moti
on
m€ xxþ
r_ xxþ
sx¼
F0
cos!
t
(Vec
tor
form
)m€ xxþ
r_ xxþ
sx¼
F0
ei!
t
Use
x¼
Ae
i!t
togiv
est
eady
stat
edis
pla
cem
ent
x¼
iF
0
!Z
m
eið!
t !Þ
The
Effect
of
the
Tra
nsi
ent
Term
77
and
vel
oci
ty
_ xx¼
v¼
F0
Zm
eið!
t !Þ
When
F0
ei!
tre
pre
sents
F0
cos!
t x¼
F0
!Z
m
sinð!
t !Þ
v¼
F0
Zm
cosð!
t !Þ
Maxim
um
velocity¼
F0 r
atvelocity
reso
nan
tfr
equen
cy!
0¼ðs=mÞ1=2
Maxim
um
displacement¼
F0
!0 r
wher
e!0 ¼
ðs=m
r2=4
m2Þ1=2
at
displacement
reso
nan
tfr
equen
cy!¼ðs=m
r2=2
m2Þ1=2
Pow
erAbso
rbed
by
Osc
illa
tor
from
Drivi
ng
Forc
e
Osc
illa
tor
adju
sts
ampli
tude
and
phas
eso
that
pow
ersu
ppli
edeq
ual
spow
erdis
sipat
ed.
Pow
erab
sorb
ed¼
1 2ðF
2 0=Z
mÞc
os!
(cosf
ispow
erfa
ctor)
Max
imum
pow
erab
sorb
ed¼
F2 0
2r
at!
0
Max
miu
mpow
er
2ab
sorb
ed¼
F2 0
4r
at!
1¼!
0
r 2m
and!
2¼!
0þ
r 2m
Qual
ity
fact
or
Q¼!
0m r¼
!0
!2 !
1
Q¼
max
imum
dis
pla
cem
ent
atdis
pla
cem
ent
reso
nan
ce
dis
pla
cem
ent
as!!
0
¼Aðm
axÞ
F0=s
For
equiv
alen
tex
pre
ssio
ns
for
elec
tric
alosc
illa
tors
repla
cem
by
L,r
by
R,s
by
1=C
and
F0
by
V0
(volt
age)
.
78
The
Forc
ed
Osc
illa
tor

4 CoupledOscillations
Theprecedingchaptershaveshowninsomedetailhowasinglevibratingsystem
will
behave.Oscillators,however,rarely
existin
completeisolation;wavemotionowes
its
existencetoneighbouringvibratingsystemswhichareabletotransmittheirenergytoeach
other.
Such
energytransfertakesplace,ingeneral,becausetwooscillatorsshareacommon
component,capacitanceorstiffness,inductanceormass,orresistance.Resistancecoupling
inevitablybringsenergylossandarapiddecay
inthevibration,butcouplingbyeitherof
theothertwoparametersconsumesnopower,andcontinuousenergytransferovermany
oscillatorsispossible.Thisisthebasisofwavemotion.
Weshallinvestigatefirstamechanical
example
ofstiffnesscouplingbetweentwo
pendulums.Twoatomssetinacrystallatticeexperience
amutualcouplingforceand
wouldbeamenabletoasimilartreatment.Then
weinvestigatean
exampleofmass,or
inductive,coupling,andfinallyweconsiderthecoupledmotionofan
extended
arrayof
oscillatorswhichleadsusnaturallyintoadiscussiononwavemotion.
Stiffness(orCapacitance)CoupledOscillators
Figure4.1showstwoidenticalpendulums,eachhavingamassmsuspendedonalightrigid
rodoflengthl.Themassesareconnectedbyalightspringofstiffnessswhosenatural
lengthequalsthedistancebetweenthemasseswhenneitherisdisplacedfromequilibrium.
Thesmalloscillationswediscussarerestricted
totheplaneofthepaper.
Ifxandyaretherespectivedisplacementsofthemasses,then
theequationsof
motionare
m€ xx¼!mgx l!sðx!yÞ
and
m€ yy¼!mgy lþsðx!yÞ
ThePhysicsofVibrationsandWaves,6thEdition
H.J.Pain
#2005JohnWiley
&Sons,Ltd
79
Theserepresentthenormalsimpleharmonicmotiontermsofeach
pendulumplusacoup-
lingtermsðx!yÞfromthespring.Weseethatifx>ythespringisextended
beyondits
normallengthandwillactagainsttheaccelerationofxbutinfavouroftheaccelerationofy.
Writing!2 0¼g=l,where!0isthenaturalvibrationfrequency
ofeach
pendulum,gives
€ xxþ!2 0x¼!s mðx!yÞ
ð4:1Þ
€ yyþ!2 0y¼!s mðy!xÞ
ð4:2Þ
Insteadofsolvingtheseequationsdirectlyforxandywearegoingtochoosetwonew
coordinates
X¼xþy
Y¼x!y
Theimportance
ofthisapproachwillemergeasthischapterproceeds.Addingequations
(4.1)and(4.2)gives
€ xxþ€ yyþ!2 0ðxþyÞ¼0
thatis
€ XXþ!2 0X¼0
andsubtracting(4.2)from(4.1)gives
€ YYþð!
2 0þ2s=mÞY¼0
Themotionofthecoupledsystem
isthusdescribedintermsofthetwocoordinatesXandY,
each
ofwhichhasan
equationofmotionwhichissimpleharmonic.
IfY¼0,x¼yatalltimes,sothatthemotioniscompletelydescribed
bytheequation
€ XXþ!2 0X¼0
thenthefrequencyofoscillationisthesameasthatofeitherpenduluminisolationandthe
stiffnessofthecouplinghasnoeffect.Thisisbecausebothpendulumsarealwaysswinging
inphase(Figure4.2a)andthelightspringisalwaysatitsnaturallength.
y
s
ll
x
Figure
4.1
Twoiden
ticalpen
dulums,
each
alightrigid
rodoflength
lsupportingamass
man
d
coupledbyaweightlessspringofstiffness
san
dofnaturallength
equal
totheseparationofthe
massesat
zero
displacemen
t
80
CoupledOscillations

IfX¼0,x¼!yatalltimes,sothatthemotioniscompletelydescribed
by
€ YYþð!
2 0þ2s=mÞY¼0
Thefrequency
ofoscillationisgreaterbecause
thependulumsarealwaysoutofphase
(Figure
4.2b)so
thatthespringiseither
extended
orcompressed
andthecouplingis
effective.
Norm
alCoordinates,Degrees
ofFreedom
andNorm
alModes
ofVibration
ThesignificanceofchoosingXandYtodescribethemotionisthattheseparametersgivea
verysimpleillustrationofnormalcoordinates.
%Normalcoordinatesarecoordinatesinwhichtheequationsofmotiontaketheform
ofa
setoflineardifferentialequationswithconstantcoefficientsinwhicheach
equation
containsonlyonedependentvariable(oursimpleharmonicequationsinXandY).
%AvibrationinvolvingonlyonedependentvariableX(orY)iscalled
anormalmodeof
vibrationandhasitsownnormalfrequency.Insuch
anormalmodeallcomponentsof
thesystem
oscillatewiththesamenormalfrequency.
%Thetotalenergyofan
undamped
system
may
beexpressed
asasumofthesquaresof
thenormalcoordinatesmultiplied
byconstantcoefficientsandasumofthesquaresof
thefirsttimederivatives
ofthecoordinates
multiplied
byconstantcoefficients.The
energyofacoupledsystem
when
theXandYmodesarebothvibratingwouldthen
be
expressed
intermsofthesquaresofthevelocitiesanddisplacementsofXandY.
%Theimportanceofthenormalmodesofvibrationisthatthey
areentirelyindependent
ofeach
other.Theenergyassociated
withanormalmodeisneverexchangedwith
anothermode;thisiswhywecanaddtheenergiesoftheseparatemodestogivethe
totalenergy.Ifonlyonemodevibratesthesecondmodeofoursystem
willalwaysbeat
rest,acquiringnoenergyfromthevibratingmode.
%Eachindependentway
bywhichasystem
may
acquireenergyiscalled
adegreeof
freedomtowhichisassigneditsownparticularnormalcoordinate.Thenumberofsuch
ll
ll
(a)
(b)
Figure
4.2
(a)Th
e‘in
phase’
mode
ofvibration
given
by€ XXþ!
2 0X¼
0,where
Xis
thenorm
al
coordinate
X¼
xþ
yan
d!
2 0¼
g=l.(b)‘Outofphase’
modeofvibrationgiven
by€ YYþð!
2 0þ
2s=
mÞ
where
Yis
thenorm
alco
ordinate
Y¼
x!
y
NormalCoordinates,DegreesofFreedomandNormalModesofVibration
81
differentwaysinwhichthesystem
cantakeupenergydefinesitsnumberofdegreesof
freedom
anditsnumber
ofnormal
coordinates.Eachharmonicoscillatorhas
two
degreesoffreedom,itmay
takeupbothpotentialenergy(normalcoordinateX)and
kineticenergy(normalcoordinate
_ XX).Inourtwonormalmodestheenergiesmay
be
written
EX¼a_ XX2þbX2
ð4:3aÞ
and
EY¼c_ YY2þdY2
ð4:3bÞ
wherea,b,canddareconstant.
Oursystem
oftwocoupledpendulumshas,then,fourdegrees
offreedomandfour
normalcoordinates.
Anyconfigurationofourcoupledsystem
mayberepresentedbythesuper-positionofthe
twonormalmodes
X¼xþy¼X0cosð!
1tþ$1Þ
and
Y¼x!y¼Y0cosð!
2tþ$2Þ
whereX0andY0arethenormalmodeamplitudes,whilst!2 1¼g=land!2 2¼ðg=lþ2s=mÞ
arethenormalmodefrequencies.Tosimplifythediscussionletuschoose
X0¼Y0¼2a
andput
$1¼$2¼0
Thependulumdisplacementsarethen
given
by
x¼
1 2ðXþYÞ¼acos!1tþacos!2t
and
y¼
1 2ðX!YÞ¼acos!1t!acos!2t
withvelocities
_ xx¼!a!1sin!1t!a!2sin!2t
and
_ yy¼!a!1sin!1tþa!2sin!2t
82
CoupledOscillations

Nowletussetthesystem
inmotionbydisplacingtherighthandmassadistancex¼2a
andreleasingbothmassesfromrestsothat
_ xx¼
_ yy¼0attimet¼0.
Figure4.3showsthatourinitialdisplacementx¼2a,y¼0att¼0may
beseen
asa
combinationofthe‘inphase’modeðx¼y¼asothatxþy¼X0¼2aÞandofthe‘outof
phase’modeðx¼!y¼aso
thatY0¼2aÞ.Afterrelease,themotionoftherighthand
pendulumisgiven
by
x¼acos!1tþacos!2t
¼2acosð!
2!!1Þt
2cosð!
1þ!2Þt
2
andthatofthelefthandpendulumisgiven
by
y¼acos!1t!acos!2t
¼!2asinð!
1!!2Þt
2sinð!
1þ!2Þt
2
¼2asinð!
2!!1Þt
2sinð!
1þ!2Þt
2
Ifweplotthebehaviouroftheindividualmassesbyshowinghowxandychangewithtime
(Figure4.4),weseethatafterdrawingthefirstmassasideadistance2aandreleasingitx
followsaconsinusoidalbehaviouratafrequency
whichistheaverageofthetwonormal
modefrequencies,butitsamplitudevariescosinusoidallywithalowfrequency
whichis
halfthedifference
betweenthenormalmodefrequencies.Ontheotherhand,y,which
startedatzero,vibratessinusoidallywiththeaveragefrequencybutitsamplitudebuildsup
to2aandthen
decayssinusoidallyatthelowfrequencyofhalfthedifferencebetweenthe
normalmodefrequencies.Inshort,theydisplacementmassacquiresalltheenergyofthex
displacementmasswhichisstationarywhenyisvibratingwithamplitude2a,butthe
energyisthenreturnedtothemassoriginallydisplaced.Thiscompleteenergyexchangeis
only
possiblewhen
themassesareidenticalandtheratioð!
1þ!2Þ=ð!
2!!1Þisan
integer,otherwiseneitherwilleverbequitestationary.Theslowvariationofamplitudeat
halfthenormalmodefrequency
difference
isthephenomenonof‘beats’whichoccurs
betweentwooscillationsofnearlyequalfrequencies.Weshalldiscussthisfurtherinthe
sectiononwavegroupsinChapter5.
y = 0
a2a
a
YX
− a
a
++
Figure4.3
Thedisplacemen
tofonepen
dulum
byan
amount2
ais
shownas
theco
mbinationofthe
twonorm
alco
ordinates
Xþ
Y
NormalCoordinates,DegreesofFreedomandNormalModesofVibration
83
Theimportantpointtorecognize,however,isthatalthoughtheindividualpendulums
may
exchangeenergy,thereisnoenergyexchangebetweenthenormalmodes.Figure4.3
showed
theinitialconfigurationx¼2a,y¼0,decomposedintotheXandYmodes.The
higherfrequencyoftheYmodeensuresthatafteranumberofoscillationstheYmodewill
havegained
halfavibration(aphaseof%rad)ontheXmode;thisisshowninFigure4.5.
ThecombinationoftheXandYmodesthen
givesythevalueof2aandx¼0,andthe
processisrepeated.WhenYgainsanother
halfvibrationthenxequals2aagain.The
pendulumsmay
exchangeenergy;thenormalmodesdonot.
Toreinforcetheimportance
ofnormalmodes
andtheircoordinates
letusreturn
to
equations(4.3a)and(4.3b).Ifwemodifyournormalcoordinatestoread
Xq¼
m 2
!
1=2ðxþyÞ
and
Yq¼
m 2
!
1=2
ðx!yÞ
tt
y displacementx displacement
2a
2a
00
Figure
4.4
Beh
aviourwith
time
ofindividual
pen
dulums,
showing
complete
energy
exch
ange
betwee
nthepen
dulumsas
xdecreases
from
2ato
zero
whilst
ygrowsfrom
zero
to2
a
x = 0
a2a
a
YX
a− a
+
−
Figure
4.5
Thefaster
vibrationofthe
Ymoderesultsin
aphasegainof%radove
rthe
Xmode
of
vibration,to
give
y¼
2a,
whichis
shownhereas
aco
mbinationofthenorm
almodes
X!
Y
84
CoupledOscillations

then
wefindthatthekineticenergyinthoseequationsbecomes
Ek¼T¼a_ XX2þc_ YY2¼1 2_ XX2 qþ1 2_ YY2 q
ð4:4aÞ
andthepotentialenergy V¼bX2þdY2¼1 2
g l
!
X2 qþ1 2
g lþ2s m
"#
Y2 q
¼1 2!2 0X2 qþ1 2!2 sY2 q;
ð4:4bÞ
where!2 0¼g=land!2 s¼g=lþ2s=m.
NotethatthecoefficientsofX2 qandY2 qdependonlyonthemodefrequenciesandthatthe
propertiesofindividualpartsofthesystem
arenolongerexplicit.
Thetotalenergyofthesystem
isthesumoftheenergiesofeach
separateexcitedmode
fortherearenocrossproductsXqYqintheenergyexpressionofourexample,i.e.,
E¼TþV¼
1 2_ XX2 qþ1 2!2 0X2 q
"#
þ1 2_ YY2 qþ1 2!2 sY2 q
"#
Atomsinpolyatomicmoleculesbehaveas
themassesofourpendulums;thenormal
modes
oftwotriatomicmoleculesCO2andH2Oareshownwiththeirfrequencies
in
Figure4.6.Normalmodesandtheirvibrationswilloccurfrequentlythroughoutthisbook.
O OC
O
C C
O
HH
HH
OO
HH
O OO
H2O
105°
ω1 = 11 × 1013 sec−1
ω2 = 11.27 × 1013 sec−1
ω3 = 4.78 × 1013 sec−1
ω3 = 2 × 1013 sec−1
ω2 = 7.05 × 1013 sec−1
ω1 = 4.16 × 1013 sec−1
CO
2
Figure
4.6
NormalmodesofvibrationfortriatomicmoleculesCO2andH2O
NormalCoordinates,DegreesofFreedomandNormalModesofVibration
85
TheGeneral
MethodforFindingNorm
alModeFrequencies,
Matrices,Eigenvectors
andEigenvalues
Wehavejustseen
thatwhen
acoupledsystem
oscillatesinasinglenormalmodeeach
componentofthesystem
willvibratewithfrequencyofthatmode.Thisallowsustoadopt
amethodwhichwillalwaysyieldthevalues
ofthenormalmodefrequencies
andthe
relativeamplitudesoftheindividualoscillatorsateach
frequency.
Supposethatoursystem
ofcoupledpendulumsinthelastsectionoscillatesinonlyone
ofitsnormalmodesoffrequency!.
Then,intheequationsofmotion
m€ xxþmgðx=lÞþsðx!yÞ¼0
and
m€ yyþmgðy=lÞ!sðx!yÞ¼0
Ifthependulumsstartfromtest,wemay
assumethesolutions
x¼Aei!t
y¼Bei!t
whereAandBarethedisplacementamplitudesofxandyatthefrequency!.Usingthese
solutions,theequationsofmotionbecome
½!m!2Aþðmg=lÞAþsðA!BÞ'ei!t¼0
½!m!2Bþðmg=lÞB!sðA!BÞ'ei!t¼0
ð4:5Þ
Thesumoftheseexpressionsgives
ðAþBÞð!m!2þmg=lÞ¼0
whichissatisfiedwhen!2¼g=l,thefirstnormalmodefrequency.Thedifferencebetween
theexpressionsgives
ðA!BÞð!m!2þmg=lþ2sÞ¼0
whichissatisfied
when!2¼g=lþ2s=m,thesecondnormalmodefrequency.
Insertingthevalue!2¼g=l
inthepairofequationsgivesA¼B(the‘inphase’
condition),whilst!2¼g=lþ2s=mgivesA¼!B(theantiphaseconditon).
Thesearetheresultswefoundintheprevioussection.
Wemay,however,bydividingthroughbymei!t ,rewriteequation(4.5)inmatrixform
as
!2 0þ!2 s
!!2 s
!!2 s
!2 0þ!2 s
$%
A B
$%
¼!2A B
$%
ð4:6Þ
where
!2 0¼g l
and!2 s¼s m
86
CoupledOscillations

Thisiscalled
aneigenvalueequation.Thevalueof!
2forwhichnon-zerosolutionsexist
arecalled
theeigenvaluesofthematrix.Thecolumnvectorwithcomponents
AandBisan
eigenvectorofthematrix.
Equation(4.6)may
bewritten
inthealternativeform
ð!2 0þ!
2 s"!
2Þ
"!
2 s
"!
2 sð!
2 0þ!
2 s"!
2Þ
!
A B
!
¼0
ð4:7Þ
andtheseequationshaveanon-zerosolutionifandonly
ifthedeterminantofthematrix
vanishes;that
is,if
ð!2 0þ!
2 s"!
2Þ2
"!
4 s¼
0
or
ð!2 0þ!
2 s"!
2Þ¼
%!
2 s
i.e.
!2 1¼!
2 0or
!2 2¼!
2 0þ2!
2 s
asweexpect.
Thesolution!
2 1¼!
2 0in
equation(4.6)yieldsA
¼Bas
previouslyand!
2 2¼!
2 0þ2!
2 s
yieldsA
¼"B.
Because
thesystem
startedfrom
rest
wehavebeenable
toassumesolutionsofthe
simple
form
x¼
Aei!t
y¼
Bei!t
When
thependulumshavean
initialvelocity
att¼
0,theboundaryconditionsrequire
solutionsoftheform
x¼
Aei
ð!tþ"xÞ
y¼
Bei
ð!tþ"yÞ
whereeach
norm
almodefrequency!has
itsownparticularvalueofthephaseconstant".
Thenumber
ofadjustableconstantsthen
allowsthesolutionsto
satisfythearbitrary
values
oftheinitialdisplacementsandvelocities
ofboth
pendulums.
(Problems4.1,4.2,4.3,4.4,4.5,4.6,4.7,4.8,4.9,4.10,4.11)
Mas
sorIn
ductan
ceCo
upling
Inalaterchapterweshalldiscuss
thepropagationofvoltageandcurrentwaves
alonga
transm
issionlinewhichmay
beconsidered
asaseries
ofcoupledelectrical
oscillators
havingidenticalvalues
ofinductance
andofcapacitance.Forthemomentweshallconsider
theenergytransfer
betweentwoelectrical
circuitswhichareinductivelycoupled.
Mass
orInductanceCoupling
87
Amutual
inductance
(shared
mass)
exists
betweentwoelectrical
circuitswhen
the
magnetic
fluxfrom
thecurrentflowingononecircuit
threadsthesecondcircuit.Any
changeoffluxinducesavoltagein
both
circuits.
Atransform
erdependsuponmutual
inductance
foritsoperation.Thepower
sourceis
connectedto
thetransform
erprimarycoilofnpturns,over
whichis
woundin
thesame
sense
asecondarycoilofnsturns.Ifunitcurrentflowingin
asingleturn
oftheprimarycoil
producesamagnetic
flux#,then
thefluxthreadingeach
primaryturn
(assumingnoflux
leakageoutsidethecoil)is
np#andthetotalfluxthreadingallnpturnsoftheprimaryis
Lp¼
n2 p#
whereL
pis
theselfinductance
oftheprimarycoil.Ifunitcurrentin
asingle
turn
ofthe
secondarycoilproducesaflux#,then
thefluxthreadingeach
secondaryturn
isns#andthe
totalfluxthreadingthesecondarycoilis L
s¼
n2 s#;
whereL
sis
theselfinductance
ofthesecondarycoil.
Ifallthefluxlines
from
unitcurrentin
theprimarythread
alltheturnsofthesecondary,
then
thetotalfluxlines
threadingthesecondarydefines
themutualinductance
M¼
nsðn
p#Þ¼
ffiffiffiffiffiffiffiffiffiffi
LpL
s
p
Inpractice,
because
offluxleakageoutsidethecoils,
M<
ffiffiffiffiffiffiffiffiffiffi
LpL
s
p
andtheratio
Mffiffiffiffiffiffiffiffiffiffi
LpL
s
p¼
k;thecoefficientofcoupling:
IftheprimarycurrentI p
varieswithei!
t ,achangeofI p
gives
aninducedvoltage
"L
pdI p=dt¼
"i!
LI p
intheprimaryandan
inducedvoltage"M
dI p=d
t¼
"i!
MI p
inthe
secondary.
Ifweconsider
now
thetworesistance-freecircuitsofFigure
4.7,whereL1andL2are
coupledbyfluxlinkageandallowed
tooscillate
atsomefrequency
!(thevoltageand
currentfrequency
ofboth
circuits),then
thevoltageequationsare
i!L1I 1
"i
1
!C
1
I 1þi!
MI 2
¼0
ð4:8Þ
C2
L 2
L1
C 1
M = Mutual Inductance
M
Figu
re4.7
Inductively(m
ass)
coupledLC
circuitswithmutual
inductance
M
88
CoupledOscillations

and
i!L2I 2
"i
1
!C
2
I 2þi!
MI 1
¼0
ð4:9Þ
whereM
isthemutual
inductance.
Multiplying(4.8)by!=iL
1gives
!2I 1
"I 1
L1C
1
þM L1
!2I 2
¼0
andmultiplying(4.9)by!=iL2gives
!2I 2
"I 2
L2C
2
þM L2
!2I 1
¼0;
wherethenaturalfrequencies
ofthecircuit!
2 1¼
1=L
1C
1and!
2 2¼
1=L
2C
2give
ð!2 1"!
2ÞI
1¼
M L1
!2I 2
ð4:10Þ
and
ð!2 2"!
2ÞI
2¼
M L2
!2I 1
ð4:11Þ
Theproduct
ofequations(4.10)and(4.11)gives
ð!2 1"!
2Þð!
2 2"!
2Þ¼
M2
L1L2
!4¼
k2!
4;
ð4:12Þ
wherekisthecoefficientofcoupling.
Solvingfor!
gives
thefrequencies
atwhichenergyexchangebetweenthecircuits
allowsthecircuitsto
resonate.Ifthecircuitshaveequalnaturalfrequencies!
1¼!
2¼!
0,
say,
then
equation(4.12)becomes
ð!2 0"!
2Þ2
¼k2!
4
or
ð!2 0"!
2Þ¼
%k!
2
that
is
!¼
%!
0ffiffiffiffiffiffiffiffiffiffiffi
1%
kp
Thepositivesigngives
twofrequencies
!0 ¼
!0
ffiffiffiffiffiffiffiffiffiffiffi
1þ
kp
and
!00¼
!0
ffiffiffiffiffiffiffiffiffiffiffi
1"
kp
atwhich,ifweplotthecurrentam
plitudeversusfrequency,twomaxim
aappear(Figure4.8).
Mass
orInductanceCoupling
89
Inloose
couplingkandM
aresm
all,and!
0 (!
00(!
0,so
that
both
system
sbehave
almost
independently.
Intightcouplingthefrequency
difference
!00"!
0increases,
the
peakvalues
ofcurrentaredisplacedandthedip
betweenthepeaksismore
pronounced.In
thissimpleanalysistheeffectofresistance
has
beenignored.In
practicesomeresistance
is
alwayspresentto
limittheam
plitudemaxim
um.
(Problems4.12,4.13,4.14,4.15,4.16)
CoupledOscillationsofaLo
aded
String
Asafinalexam
pleinvolvingalargenumber
ofcoupledoscillatorsweshallconsider
alight
stringsupportingnequalmassesmspaced
atequaldistance
aalongitslength.Thestringis
fixed
atboth
ends;ithas
alength
ðnþ1Þa
andaconstanttensionTexistsat
allpointsand
alltimes
inthestring.
Smallsimple
harmonic
oscillationsofthemassesareallowed
inonly
oneplaneandthe
problem
isto
findthefrequencies
ofthenorm
almodes
andthedisplacementofeach
mass
inaparticularnorm
almode.
Thisproblem
was
firsttreatedbyLagrange,itsparticularinterestbeingtheuse
itmakes
ofnorm
almodes
and
thelightit
throwsupon
thewavemotion
and
vibration
ofa
continuousstringtowhichitapproxim
ates
asthelinearseparationandthemagnitudeofthe
massesareprogressivelyreduced.
Figure
4.9
showsthedisplacementyroftherth
masstogether
withthose
ofitstwo
neighbours.Theequationofmotionofthis
massmay
bewritten
by
consideringthe
components
ofthetensiondirectedtowardstheequilibrium
position.Therth
massis
pulled
downwardstowardstheequilibrium
positionbyaforceTsin'1,dueto
thetension
Current amplitude
Coupling
(a)k large
(b) k intermediate
(c)k small
ω0
ω
(a)
(b)(c)
Figu
re4.8
Variationofthecurrentam
plitudein
each
circuitneartheresonantfrequency.Asm
all
resistance
prevents
theam
plitudeat
resonance
from
reachinginfinitevalues
butthis
has
been
ignoredin
thesimpleanalysis.Flatteningoftheresponse
curvemaximumgives
‘frequency
bandpass’
coupling
90
CoupledOscillations

onitsleftandaforceTsin'2dueto
thetensiononitsrightwhere
sin'1¼
yr"
yr"
1
a
and
sin'2¼
yr"
yrþ
1
a
Hence
theequationofmotionisgiven
by
md2yr
dt2
¼"T
ðsin'1þsin'2Þ
¼"T
yr"
yr"
1
aþ
yr"
yrþ
1
a
$%
so
d2yr
dt2
¼€ yyr¼
T maðy
r"1"2yrþ
yrþ
1Þ
ð4:13Þ
If,in
anorm
almodeofoscillationoffrequency
!,thetimevariationofyris
simple
harmonicabouttheequilibrium
axis,wemay
writethedisplacementoftherth
massin
this
modeas
yr¼
Arei!
t
whereA
risthemaxim
um
displacement.Sim
ilarly
yrþ
1¼
Arþ
1ei!tandyr"
1¼
Ar"
1ei!
t .
Usingthesevalues
ofyin
theequationofmotiongives
"!
2A
rei!
t¼
T maðA
r"1"2A
rþ
Arþ
1Þe
i!t
or
"A
r"1þ
2"
ma!
2
T
&'
Ar"
Arþ
1¼
0ð4:14Þ
Thisisthefundam
entalequation.
m
m
m
aa
yr+ 1
yr− 1
yr
yr− yr − 1
yr− yr+ 1
1θ
2θ
Figu
re4.9
Displacements
ofthreemassesonaloaded
stringunder
tension
Tgivingequationof
motionm€ yy r
¼Tðy
rþ1"2yrþ
yr"
1Þ=
a
CoupledOscillationsofaLoadedString
91
Theprocedure
nowisto
startwiththefirstmassr¼
1andmovealongthestring,writing
outthesetofsimilar
equationsas
rassumes
thevalues
r¼
1;2;3;.
..;n
remem
beringthat,
because
theendsarefixed
y0¼
A0¼
0and
ynþ1¼
Anþ1¼
0
Thus,when
r¼
1theequationbecomes
2"
ma!
2
T
&'
A1"
A2¼
0ðA
0¼
0Þ
When
r¼
2wehave
"A
1þ
2"
ma!
2
T
&'
A2"
A3¼
0
andwhen
r¼
nwehave "A
n"1þ
2"
ma!
2
T
&'
An¼
0ðA
nþ1¼
0Þ
Thus,wehaveasetofnequationswhich,when
solved,willyield
ndifferentvalues
of!
2,
each
valueof!beingthefrequency
ofanorm
almode,thenumber
ofnorm
almodes
being
equal
tothenumber
ofmasses.
Theform
alsolutionofthissetofnequationsinvolves
thetheory
ofmatrices.However,
wemay
easily
solvethesimple
casesforoneortwomassesonthestring(n
¼1or2)and,
inadditon,itispossible
toshow
what
thecomplete
solutionfornmassesmustbewithout
usingsophisticatedmathem
atics.
First,when
n¼
1,onemassonastringoflength
2a,weneedonly
theequationforr¼
1
wherethefixed
endsofthestringgiveA
0¼
A2¼
0.
Hence
wehave
2"
ma!
2
T
&'
A1¼
0
giving
!2¼
2T
ma
asingle
allowed
frequency
ofvibration(Figure
4.10a).
When
n¼
2,stringlength
3a(Figure
4.10b)weneedtheequationsforboth
r¼
1and
r¼
2;that
is
2"
ma!
2
T
&'
A1"
A2¼
0
92
CoupledOscillations

and
"A
1þ
2"
ma!
2
T
&'
A2¼
0ðA
0¼
A3¼
0Þ
Eliminating
A1orA
2showsthat
thesetwoequationsmay
besolved
(are
consistent)
when
2"
ma!
2
T
&'
2
"1
¼0
that
is
2"
ma!
2
T"1
&'
2"
ma!
2
Tþ1
&'
¼0
Thus,therearetwonorm
almodefrequencies
!2 1¼
T ma
and
!2 2¼
3T
ma
aa
m (a)
(b)
mm
m
m
A1 A1
A2
A1 = −A2
A2
ω22
3T
ma
=
A1 = A2
ω12
T ma
=
ω2
2T
ma
=
n =
1
n =
2
Figu
re4.10
(a)Norm
alvibrationofasingle
massm
onastringoflength
2aat
afrequency
!2¼
2T=m
a.(b)Norm
alvibrationsoftwomassesonastringoflength
3ashowingtheloose
coupled
‘inphase’modeoffrequency!
2 1¼
T=m
aandthetightercoupled‘outofphase’modeoffrequency
!2 2¼
3T=m
a.Thenumber
ofnorm
almodesofvibrationequalsthenumber
ofmasses
CoupledOscillationsofaLoadedString
93
Usingthevalues
of!
1in
theequationsforr¼
1andr¼
2gives
A1¼
A2theslow
‘in
phase’
oscillationofFigure
4.10b,whereas!
2gives
A1¼
"A
2thefaster
‘anti-phase’
oscillationresultingfrom
theincreasedcoupling.
Tofindthegeneral
solutionforanyvalueofnletusrewrite
theequation
"A
r"1þ
2"
ma!
2
T
&'
Ar"
Arþ
1¼
0
intheform
Ar"
1þ
Arþ
1
Ar
¼2!
2 0"!
2
!2 0
where
!2 0¼
T ma
Weseethat
foranyparticularfixedvalueofthenorm
almodefrequency
!ð!
jsay)the
righthandsideofthisequationisconstant,independentofr,so
theequationholdsforall
values
ofr.What
values
canwegiveto
Arwhichwillsatisfythis
equation,meetingthe
boundaryconditionsA
0¼
Anþ1¼
0at
theendofthestring?
Let
usassumethat
wemay
express
theam
plitudeoftherthmassat
thefrequency!jas
Ar¼
Ceir'
whereCisaconstantand'issomeconstantangle
foragiven
valueof!j.Thelefthand
sideoftheequationthen
becomes
Ar"
1þ
Arþ
1
Ar
¼Cðe
iðr"1Þ'
þeiðr
þ1Þ'Þ
Ceir'
¼ðe
"i'
þei'Þ
¼2cos'
whichisconstantandindependentofr.
Thevalueof' j
(constantat!j)iseasily
foundfrom
theboundaryconditions
A0¼
Anþ1¼
0
which,usingsinr'
from
eir'gives
A0¼
Csinr'
¼0
ðautomatically
atr¼
0Þ
and
Anþ1¼
Csinðn
þ1Þ'
¼0
when
ðnþ1Þ'
j¼
j(for
j¼
1;2;.
..;n
94
CoupledOscillations

Hence
'j¼
j(
nþ1
and
Ar¼
Csinr'
j¼
Csin
rj(
nþ1
whichistheam
plitudeoftherth
massat
thefixed
norm
almodefrequency
!j.
Tofindtheallowed
values
of!
jwewrite
Ar"
1þ
Arþ
1
Ar
¼2!
2 0"!
2 j
!2 0
¼2cos'j¼
2cos
j(
nþ1
giving
!2 j¼
2!
2 01"cos
j(
nþ1
!
ð4:15Þ
wherejmay
takethevalues
j¼
1;2;.
..;n
and!
2 0¼
T=m
a.
Note
that
thereisamaxim
um
frequency
ofoscillation!j¼
2!
0.Thisiscalled
the‘cut
off’frequency
andsuch
anupper
frequency
limitischaracteristicofalloscillatingsystem
s
composedofsimilar
elem
ents(themasses)
repeatedperiodically
throughoutthestructure
ofthesystem
.Weshallmeetthisin
thenextchapteras
afeature
ofwavepropagationin
crystals.
Tosummarize,
wehavefoundthenorm
almodes
ofoscillationofncoupledmasseson
thestringto
havefrequencies
given
by
!2 j¼
2T
ma
1"cos
j(
nþ1
!
ðj¼
1;2;3
...nÞ
Ateach
frequency
!jtherth
masshas
anam
plitude
Ar¼
Csin
rj(
nþ1
whereCis
aconstant.
(Problems4.17,4.18,4.19,4.20,4.21,4.22)
TheWav
eEq
uation
Finally,in
thischapter,weshowhowthecoupledvibrationsin
theperiodicstructure
ofour
loaded
stringbecomewaves
inacontinuousmedium.
TheWaveEquation
95