Embed Size (px)
Citation preview

Headway Spacing Model for
a Heavy Vehicle Based on
Experimental Data
L. NOUVELIERE
D. STANCZYK
B. DERVIEUX A. RABEHI
C. MVOME B. PELAUD

Introduction
• Strong decrease of the number of fatal
accidents on roads (France)
– The typologies of accidents do not seem to
evolve very much
– The driver/infrastructure stay at the origin of
numerous failures
• ABS, ESP, … improve the driving but only
correct a deteriorated situation, when the
driver introduces a corrective action
– Contribution of predictive systems
Lydie NOUVELIERE
Introduction
• Road automation solution
– To help the driver to better drive regarding the
current driving situation by sharing the driving
action between Man-Machine
– Road safety, eco-driving : a Vehicle-
Infrastructure-Driver interaction
– ABV project : Low speed automation of
vehicles
Lydie NOUVELIERE

ABV project
• French ANR project (5.5M €)
• Aims at developing ADAS with copilot
systems for light and heavy vehicles
whatever the speed with special scenarios
at low speed
Lydie NOUVELIERE

ABV project
• Many technological evolutions make the
driving automation possible
– High increase of the number of sensors
• More information about the vehicle and its
environment
– Computation power
– Control of the actuators and driver’s feedback
Lydie NOUVELIERE

ABV project
• Development of several technological
modules
– Perception
– Trajectory planning
– Control
• Copilot system
• Low fuel consumption
Safe itinerary definition
Lydie NOUVELIERE

Safe itinerary definition
• Offers :
– a safe and low energy trajectory
– a driving assistance in the longitudinal and
lateral modes
– some services from road managers, vehicles
flow managers, …
Lydie NOUVELIERE

Safe itinerary definition
• Needs :
– Perception performance
– Fast trajectory planning
– Road/Vehicle interaction (speed limit in
curves, legal speed, eHorizon, …)
– Control inputs and robust control for several
categories of vehicles (light, heavy, …)
• Longitudinal mode :
Speed, safe headway spacing for HV
Safe ADAS with low energy consumption
Lydie NOUVELIERE

Safe Distance
• Relating the individual behavior of a given
driver to the safety requirements
associated with traffic conditions
– Vehicle model
– Braking distance
– Safe distance
– Headway spacing
Lydie NOUVELIERE

Vehicle Modeling
• Non-linear dynamic model
• First order braking and engine actuators
• Simplified gearbox model introduced in the
model
Lydie NOUVELIERE
ac
acacac
br
brbrbr
rbrreee
xr
TTT
TTT
hFtTi
isathKRtTtI
txci
isatKtxM
*
*max
2
max
))()(.()()1()(
0)()(.)(
0)(* tTbr
0)(* tTac
))(),(max(
)()(
txtRh
txtRhi
e
e

Braking distance
• Initial condition : at time t0, the vehicle
brakes with Tbr*
• Braking distance performed before the
vehicle stops :
• It is looked for ts such that:
• Braking distance:
)1()()()(0)(0)( 00
0000000 iRh
VtVtxxtxtTtT eacbr
0)( 0 sttx
00
*
0 )(,...),,( xttxKTVdd srbrss
Lydie NOUVELIERE

Headway spacing
• Safe distance and headway spacing :
].4
)(3
))2
)(
)(2
)((
2[
)(3/
1
max3
0max2max2
0
22max
0
2max
max*2max*22
max
0
2
0max
220min
*
02
0
2
0
*
max
ss
s
s
tVK
ictV
I
hRctMV
tF
th
T
h
tT
I
hRtVMV
K
i
IMhR
IVdd
ThMVhR
VI
VhchFTt
r
a
e
as
sf
sbrbrbrbr
ere
ets
brbre
afbr
s
)()()().2
1()()),((
~ 22000 txctxbatxctxbattxds
Lydie NOUVELIERE

Experimental Study
• Experimental system: Weighing equipment
for heavy vehicle on the circulating lane
• French road network partially equipped
with different measurement stations
(SIREDO, STAL, EPM, …) at some key
points to obtain a reality of the traffic on
national roads and highways
Lydie NOUVELIERE
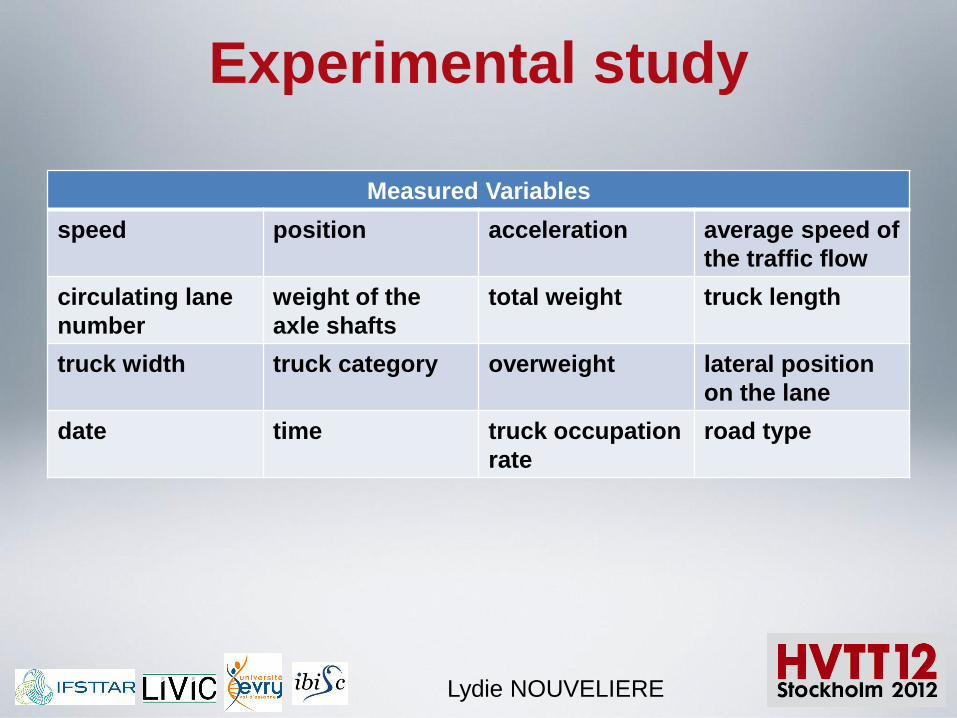
Experimental study
Measured Variables
speed position acceleration average speed of
the traffic flow
circulating lane
number
weight of the
axle shafts
total weight truck length
truck width truck category overweight lateral position
on the lane
date time truck occupation
rate
road type
Lydie NOUVELIERE
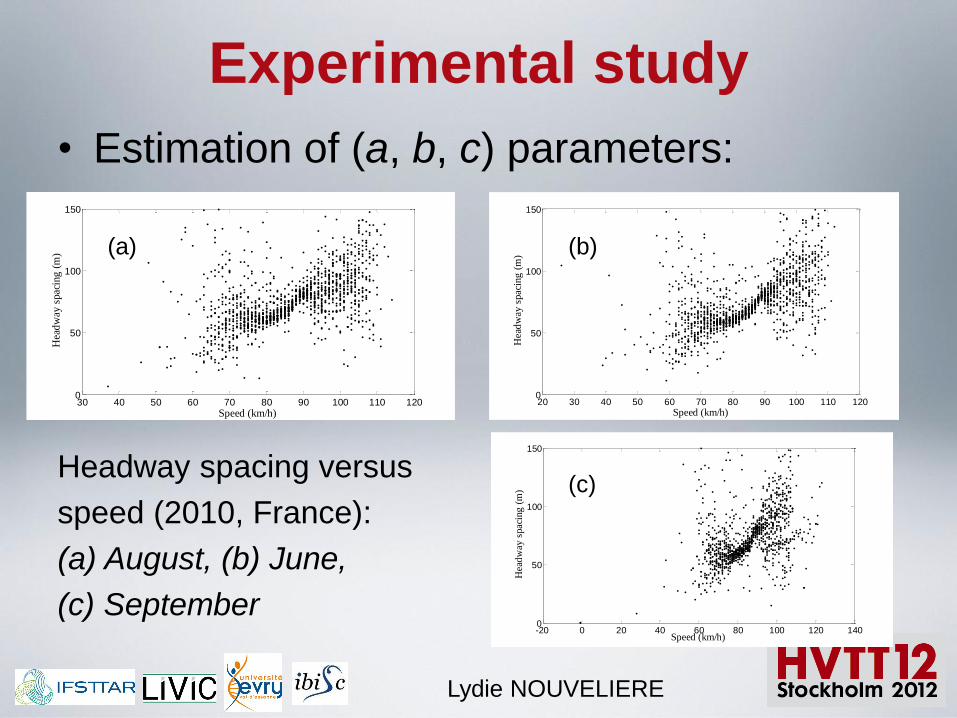
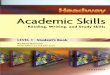
Experimental study
• Estimation of (a, b, c) parameters:
Headway spacing versus
speed (2010, France):
(a) August, (b) June,
(c) September
30 40 50 60 70 80 90 100 110 1200
50
100
150
Speed (km/h)
Hea
dw
ay s
pac
ing
(m
)
20 30 40 50 60 70 80 90 100 110 1200
50
100
150
Speed (km/h)
Hea
dw
ay s
pac
ing
(m
)
-20 0 20 40 60 80 100 120 1400
50
100
150
Speed (km/h)
Hea
dw
ay s
pac
ing
(m
)
(a) (b)
(c)
Lydie NOUVELIERE

Lydie NOUVELIERE

Lydie NOUVELIERE
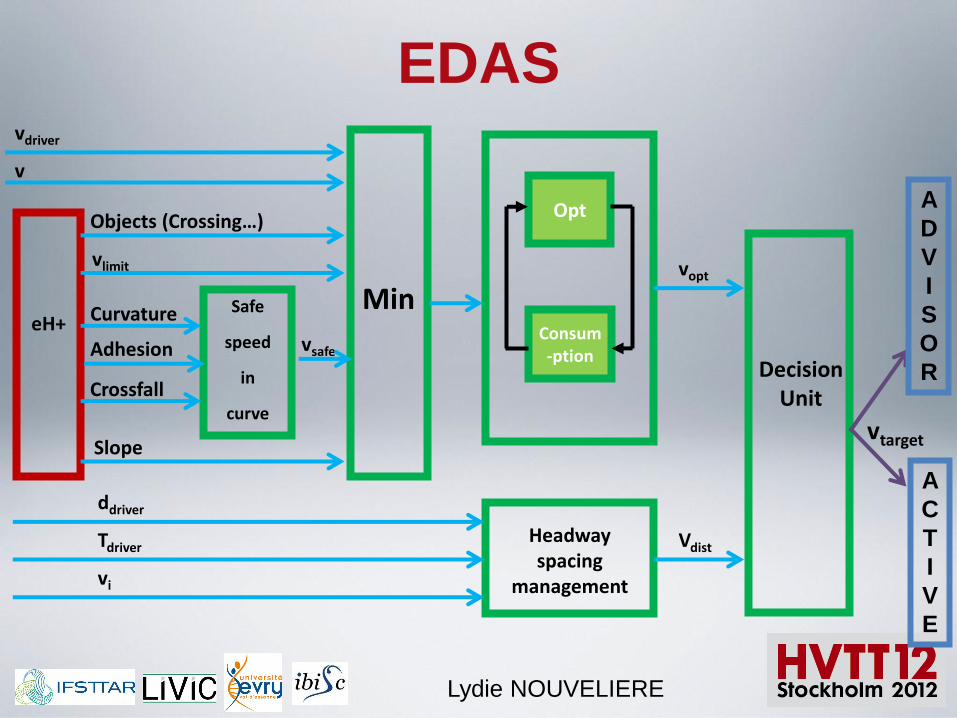
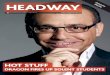
EDAS
Lydie NOUVELIERE
Min Safe
speed
in
curve
eH+
Headway spacing
management
Opt
Consum-ption
Decision Unit
vdriver
v
Objects (Crossing…)
vlimit
Curvature
Crossfall
Adhesion vsafe
vopt
Vdist
ddriver
Tdriver
vi
vtarget Slope
A
D
V
I
S
O
R
A
C
T
I
V
E

50 D
R
EDAS
• Legal speed digital map of infrastructure
• Limit speed while entering a curve use of
a curve warning system
• Safe headway spacing
Lydie NOUVELIERE

EDAS
Lydie NOUVELIERE

Conclusion
• Political issues :
– Road managers :
• Safety
• Predictive/Decisive actions
• Infrastructure preservation
– Vehicles flow managers
• Less accidents
• Low energy consumption
– Drivers
• Driving assistance : advisor or active systems in RT
• Eco-driving safely
Lydie NOUVELIERE

Future works
• Performing the measurements with real
tests on given equipped HV
– Accuracy in modelling
• Testing optimization algorithms (safety and
eco) on HV prototype
– First evaluation
• Analysis of the gains in accidentology and
economy
Lydie NOUVELIERE

THANK YOU FOR YOUR ATTENTION !
Lydie NOUVELIERE