Embed Size (px)
DESCRIPTION
Instruction manual Hawk Win
Citation preview

© 2000 AMOT Controls Corp.
All Rights Reserved
Printed in USA
Trademarks used in this text:
Hawk-I and HawkWin are trademarks of AMOT Controls Corp.Windows and Windows 95 are registered trademarks of MicrosoftCorporation. Modbus is a registered trademark of Modicon Ltd. Othertrademarks and trade names may be used in this document to refer toeither the entities claiming the marks and names or their products.AMOT Controls Corp. disclaims any proprietary interest in trademarksand trade names other than its own.
This document is based on information available at the time of itspublication. While efforts have been made to be accurate, the informa-tion contained herein does not purport to cover all details or variations inhardware or software, nor to provide for every possible contingency inconnection with installation, operation, or maintenance. Features may bedescribed herein which are not present in all hardware and softwaresystems. AMOT Controls Corp. assumes no obligation of notice toholders of this document with respect to changes subsequently made.
AMOT Controls Corp. makes no representation or warranty, expressed,implied, or statutory with respect to, and assumes no responsibility forthe accuracy, completeness, sufficiency, or usefulness of the informationcontained herein. No warranties of merchantability or fitness for purposeshall apply.
i
SOFTWARE MANUAL
The Controls are Yours...
™HAWKWIN
Ver. 4Form 1387 D9910Copyright 1999©
AMOTCONTROLS

iii
5. GETTING STARTED ........................... 5-15.1 Building the Sequence Diagram ....................... 5-15.2 Building the Analog Diagram........................... 5-75.3 Miscellaneous .............................................. 5-10
6. OBJECT DESCRIPTIONS ................... 6-16.1 AMOT Ladder Logic Programming.................... 6-16.2 Index of Objects ............................................ 6-2
7. COMMUNICATIONS ........................ 7-17.1 Introducing Modbus Protocol .......................... 7-1
7.1.1 General .................................................... 7-17.1.2 Coding ..................................................... 7-1
7.2 Establishing Communications........................... 7-37.2.1 Networking units ...................................... 7-37.2.2 Configuring parameters ............................. 7-37.2.3 Accessing data .......................................... 7-47.2.4 Hawk-I Quick Block Registers .................... 7-47.2.5 Memory map of all MODBUS registers ....... 7-5
7.3 Most common requests .................................. 7-67.3.1 Reading alarm/shutdowns ........................ 7-67.3.2 Reading Input Status................................. 7-77.3.3 Reading Coil Status ................................... 7-77.3.4 Reading the display .................................. 7-77.3.5 Reading Analog Inputs .............................. 7-87.3.6 Forcing Coils ............................................. 7-97.3.7 Writing to Analog User inputs ................... 7-97.3.8 Writing to Setpoints ............................... 7-10
ii
1. INTRODUCTION............................... 1-11.1 Overview ...................................................... 1-11.2 Software Features ......................................... 1-11.3 Host Computer Requirements ......................... 1-21.4 Scope of This Manual ..................................... 1-2
2. HAWKWIN AND LADDER LOGIC...... 2-12.1 The HawkWin Program .................................. 2-1
2.1.1 HawkWin’s Ladder Logic ........................... 2-12.1.2 Basic Ladder Logic Concepts ....................... 2-42.1.3 Configuring Inputs With Ladder Logic ......... 2-82.1.4 Configuring Outputs With Ladder Logic ..... 2-10
2.2 The Sequence Diagram ................................. 2-112.3 Planning The Program .................................. 2-112.4 Analyzing Ladder Logic ................................. 2-12
3. INSTALLING HAWKWIN ................... 3-13.1 Host PC Requirements.................................... 3-13.2 Installing the HawkWin Program .................... 3-1
4. USING HAWKWIN............................ 4-14.1 The Hawkwin Program................................... 4-1
4.1.1 The Ladder Logic Diagram .......................... 4-14.1.2 Input-Output Tables .................................. 4-14.1.3 Modernization of Relay Systems ............... 4-14.1.4 Window Environment ................................ 4-24.1.5 AMOT Icons.............................................. 4-2
Table of Contents

The HawkWin program provides a complete upload and downloadcapability. Once the program has been put together on the host PC, itcan be downloaded to the Hawk-I with no further changes required.Similarly, any program being used in a Hawk-I can be uploaded into aPC, complete with all rung and programming notes that may have beenentered through the Hawk-I’s built-in keypad.
1.3 Host Computer Requirements
The PC that hosts the HawkWin program must have certain minimumperformance specifications. These specifications are given in Section 3 ofthis manual, which is entitled, Installing HawkWin.
1.4 Scope of This Manual
The user of this manual should have a basic understanding of ladder logicand PLC programming. This manual is not intended as an in-depthtutorial in ladder logic. HawkWin users who are not familiar with ladderlogic should consult a textbook on programmable logic controllers forentry-level information on ladder logic.
1-2
1. INTRODUCTION
1.1 Overview
This manual describes the installation and programming of HawkWin, aproprietary, Windows-based software package that is used to program thefunctions of the Hawk-I industrial controller. Applications of the Hawk-Iinclude engines, motors, pump monitoring, compressor control, wellcontrol, generator set control, small scale automation, and processmonitoring and control.
1.2 Software Features
HawkWin provides complete programming access to the Hawk-Icontroller. HawkWin simplifies PLC programming by providing separatewindows for sequence and analog functions. Frequently used functionssuch as override classes, first out annunciation and alarm, and alarm andshutdown setpoints have been integrated into the software to enable fastand easy programming.
The HawkWin sequence diagram allows users to create customizedcontrol logic for their own specific applications. The user can employdrop down menus, keyboard commands, and a point and click mouse toselect and position a large number of control functions. HawkWinprovides single menu availability of inputs, outputs, timers, and displaymessages. All object names are completely controlled by the user for easyrecognition and understanding during programming or troubleshooting.
The HawkWin sequence diagram is a convenient symbolic representationof the operational flow of analog inputs, data, and outputs. By placingand connecting objects in the sequence diagram, the user draws afunctional outline of the required control process. Drop down menus andkeyboard commands enable the programmer to set up complex controlschemes without writing line after line of computer code.
Embedded functions include PID control, split range control, multiplex,setpoints constants, setpoints variables, and most standard math func-tions. Embedded features for “bumpless” transfer allow for easy auto/manual control or multiple sensor switching.
An automatic event log eliminates the need for a separate data logger.The HawkWin program automatically logs shutdowns, alarms, andpower ups and downs with a time and date stamp with no addedprogramming required.
1-1

In ladder logic, it is important to think UP TO DOWN and LEFT TORIGHT. The PLC scans DOWN from one rung to the next, and thenscans to the RIGHT along the rung to see if that input sequence of thatparticular rung is on or TRUE. If the rung becomes active, then theoutput of that particular rung is switched to TRUE. If not, the rung staysin an off or FALSE condition. The PLC will scan DOWN to the nextrung only after it has verified the status of the rung that it is currentlychecking.
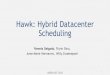
Figure 2-1. Example of system control logic using hand-wired relays.
L1 L2PB14LS7 CR1
CR1
CR1
PL3
PS7
SOLSOL3 UP
LS8 PS7 LS9 CR2 SOL4 FWD
StartReset CR2 SOL5 DWN
LS8 CR3 CR3
PL4
CR2
2-2
2. HAWKWIN AND LADDER LOGIC
2.1.1 HawkWin’s Ladder Logic
2.1 The HawkWin Program
The Hawk-I’s HawkWin software uses a programming system calledladder logic. Ladder logic is not a high-level programming language likeC++ or Java, nor is it a tedious, bulky code like machine language.Instead, ladder logic is an easy-to-use, graphical method for setting up thekinds of functions that the Hawk-I is to perform. When the programmercreates the HawkWin program, HawkWin automatically generates thedigital language required to operate the Hawk-I. The programmer doesnot have to learn a complex, high-level language, nor is it necessary totype in and then debug hundreds of lines of code. The HawkWinsoftware does all the hard work.
The following section gives a brief and selective overview of ladder logicprogramming. This manual is not intended to provide an in-depthtraining in PLC programming. For a more complete presentation ofladder logic, the Hawk-I user should consult a textbook on program-mable logic controllers. Such textbooks are now offered by Prentice Hall,Macmillan/McGraw-Hill, and the Industrial Text Company.
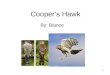
Ladder logic is based on pre-computer industrial applications whereactual relays and switches were mounted in a physical setup that re-sembled a ladder. The power input of the ladder was on the left side (Fig.2-1). When a series of switches allowed power to run to the coil of a relayon a given rung, that rung of the ladder would perform certain pre-wiredcontrol functions. A PLC such as the Hawk-I uses “soft wiring.” Thesystem is “wired” using computer software and internal digital memory(Fig. 2-2) instead of actual wires. This “soft wiring” system is much moreflexible than the older hard-wired methods, and allows complex programconfigurations to be set up and changed with just a few key strokes.
A typical PLC will scan through all the “rungs” of its programmingladder in a fraction of a second. When all the input “switches” of anyparticular rung are “on” or TRUE, that particular rung also becomes“active” or TRUE, and the output devices connected to that rung willturn on. Output devices are often called “coils,” because in the pre-PLCera, an output device was usually a relay, which was activated by runningcurrent through its magnetic coil. The output devices in the Hawk-I aresolid-state relays, digital relay-control outputs, and 4-20 mA analogoutputs, all of which can be used to control external equipment such asvalves, motor controllers, indicator lights, alarm horns, and shutdownrelays.
2-1

When the PLC reaches the last rung in the ladder, it starts scanning theladder all over again. The interval required for one complete look at everyrung of the ladder is called “scan time.” After each scan, every rung of theladder logic is individually solved, outputs are updated, and informationis exchanged with other control devices as required by the programming.
The Hawk-I’s ladder logic can interconnect various system inputs andoutputs to carry out a wide variety of logic and control operations. Inaddition to its ladder logic program, the Hawk-I also has analog capabili-ties. If the optional analog inputs and outputs are provided, the Hawk-Ican utilize a wide variety of built-in functional blocks to perform morecomplex operations such as thresholding, averaging, ramping, multiplex-ing, and even proportional-integral-derivative (PID) control functions.
Figure 2-2. System control logic of Fig. 2-1 diagrammed with ladder logic.
DI14
DI16
DI8
DI8
LS8
DI9
DI17
PB14 LS7
PS7
DO1
SOL
CR1
CR1
CR2LS9LS8
CR1 CR3
DO1
DO1
DO3
CR3
DO2
DO3
DO10
SOL3 UP
DO11
SOL4 FWD
DO12
SOL5 DWN
CR2
DO2
CR3CR2
DO2RESETSTART
Reset keyStarkey
DO3
PL4
DO4
DI1
2-3

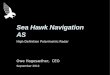
Those familiar with digital logic will see that adding a slash to a switch orcoil is the same as adding an inverter at the input of the device to negate,complement, or NOT the device. In other words, the state of the devicewill change from TRUE to FALSE, or from FALSE to TRUE. A fewsimple examples will help to clarify this point. Figure 2-3 shows fourdifferent ways of setting up a simple rung using ladder logic. On theinput or left side, there is a digital input switch called D1. On the outputor right side, there is a digital output called DO1. In this example, D1 isa limit switch, and DO1 is supposed to activate a shutdown to protectequipment from operating beyond a user-set limit. This limit may be apressure, a temperature, or the actual position of some part of themachinery.
In Rung 1, neither D1 nor DO1 has a slash through it. This means thatinput D1 is normally off or FALSE. D1 will not activate DO1 until theset limit is exceeded and D1 becomes TRUE. In this case, DO1 is alsonormally disengaged or FALSE. Its output will not turn on until D1becomes TRUE. So in Rung 1, the shutdown output relay DO1 willbecome TRUE and pass current only when D1 operates.
In Rung 2, D1 has been changed from normally FALSE (or open) tonormally TRUE (or closed) When D1 is TRUE, DO1 will sense currentand also become TRUE. In this case, current running through DO1might be holding closed the contacts of a remotely-located relay thatenables equipment operation. When D1 detects that its set limit has beenexceeded, it will turn FALSE. Then DO1 will respond to the lack ofcurrent by also turning FALSE, and the remote enabling relay will open,thus acting as a shutdown relay and turning off the equipment that itcontrols.
In Rung 3, DO1 has a slash, and DO1 does not have a slash.This circuit’s output will act the same as the output of Rung 2, because ineach case a single NOT has been added to the logic of Rung 1, but theactual circuit function is different from Rung 2. In Rung 3, D|1 isnormally FALSE so DO1’s digital output will remain TRUE and passcurrent until D1 sees that its limit is exceeded. Then D1 will becomeTRUE, and this will activate the normally-TRUE DO1, which will thenbecome FALSE and stop passing current.
Many ladder logic programmers prefer to avoid using coils that areTRUE or “on” when they receive no current. They find that program-ming is simpler and more intuitive when they use coils that are FALSE ornot “on” unless current is passing through them.
2-5
2.1.2 Basic Ladder Logic Concepts
A basic ladder logic diagram will have two kinds of symbols. There willbe circles on the right side of the ladder rungs. On the left side of therungs, there will be symbols that look very much like the symbol for anelectrical capacitor. The round symbols are called coils, and the symbolswith vertical lines are called switches. The coils are what the ladder logicturns on and off, and the switches control the on-off state of the coils.
Some coils and switches will have diagonal lines or slashes drawn throughthem. This refers to their normal condition or logical state when no inputis applied to them. In positive logic, which is the kind of logic used inHawk-I programming, a plain symbol without a slash through it isnormally open, or “off,” or disengaged. Current will not flow through it,and its Boolean logical state is FALSE, or 0. As a memory aid, note thatwhen the two vertical lines of the switch are not “connected” with a slash,current will not flow.
Putting a slash through a symbol changes its normal condition, actinglike the NOT in Boolean algebra. A symbol with a slash is NOT openwhen no input is applied. Instead, it is closed, or engaged, or “on.”Again as a memory aid, note that the slash “connects” the two verticallines. Current will flow through this switch, and its Boolean logical stateis TRUE, or 1, without any input at all. This component will turn “off”and become disengaged only when an input is applied to it.
In practical terms, what does this mean? A switch without a slash isnormally open (NO) or FALSE and will not pass current. Only whenactivated will this switch give continuity. On the other hand, a switchwith a slash across it is normally closed (NC) or TRUE. Only whenactivated will this switch open its contacts and stop passing current.
In fact, many types of commercial switches such as limit switches haveboth FALSE (NO) and TRUE (NC) contacts available, giving the user achoice. The “soft” switches in the Hawk-I can be conveniently changedfrom TRUE to FALSE and vice versa by a click of the HawkWincomputer’s space bar, and the same switch can be designated as eitherFALSE or TRUE in different parts of the ladder logic.
The outputs or coils operate in the same way. Imagine that the output inquestion is an actual, physical relay. We know that relays can havecontacts that are either NC (TRUE) or NO (FALSE). If the relay contactin question is TRUE or closed with the coil not energized, the ladderlogic symbol for that contact will have a slash through it. If the contact isFALSE or open when the coil is not energized, the symbol will not have aslash. An actual mechanical relay will often have both types of contact.
2-4

The programmer should always avoid setting up two different rungs thatcontrol the same coil. For example, if both Rung 1 and Rung 2 of Fig. 2-3 were programmed into the Hawk-I, what would happen? The Hawk-Iwould scan through the ladder logic as it is designed to do. When itreached Rung 1, D1 would not activate if the set limit was not exceeded,and DO1 would stay in the off position. But when the Hawk-I reachedRung 2 a fraction of a second later, the Hawk-I would now see a D1 thatwas labeled as normally closed. Current would be passed to DO1, whichwould then turn on. It would stay on until the scan reached Rung 1again, and so on. The result would be a very rapid switching of DO1between on and off, making the limit switch nonfunctional.
For this reason, the programmer should ensure that each of the Hawk-I’soutputs appears in only one rung of the HawkWin ladder logic diagram.The exception to this is the latched coil.
2-7
In Rung 4, both the switch and the output have slashes. This is theequivalent of a TRUE-TRUE or a NOT-FALSE-NOT FALSE. In digitallogic, two NOT’s cancel out, so Rung 4 should behave in the same wayas Rung 1. How does this happen? Switch D1 is normally TRUE until itsset limit is exceeded. In its normally-closed or TRUE state, D1 will passcurrent to DO1, which will respond to the current by activating andbecoming FALSE. Only when limit switch D1 is activated will it stoppassing current. When DO1 stops receiving current, it will revert to itsinactive state, which the NOT slash tell us is NOT open or FALSE, butTRUE (closed).
Figure 2-3 shows four distinctly different methods of implementing avery simple operation that uses only one digital switch and one digitaloutput. More complicated programming tasks may be accomplished in awide variety of ways. There is no one set way to program the Hawk-I.In fact, the HawkWin software encourages total flexibility when it comesto writing programs.
Figure 2-3. Four different limit switch circuits.
DI1
DI1
DI1
DI1
DO1
DO1
DO1
DO1
DiscreteInput
DiscreteOutput
DiscreteInput
DiscreteOutput
DiscreteInput
DiscreteOutput
DiscreteInput
DiscreteOutput
2-6

This situation calls for an OR-type input connection, which is easilyimplemented in ladder logic (see Fig. 2-4b). If any input of an OR gatebecomes TRUE, the output of the gate also becomes TRUE. The ANDand AND-OR setups are also easy to configure (see Figs. 2-4a and c).The NOT function can be inserted into a ladder logic diagram simply byadding a slash to the appropriate symbol.
Any kind of digital input function can be duplicated with ladder logic.As one possible example, consider the exclusive OR or X-OR gate, oftencalled the “any but not all” gate. Figure 2-5(a) shows the Boolean inputsand output for this gate, and Fig. 2-5(b) shows the truth table. Howwould the X-OR function be implemented in the HawkWin program?Figure 2-5(c) shows a simple way of doing this. If input A becomesTRUE, the two switches referenced to input A will change state.The upper switch will change from FALSE to TRUE and the lowerswitch will change from TRUE to FALSE. This will give two TRUEs inthe upper branch of the rung, activating the output coil, which will alsochange to TRUE.
Making input B TRUE will have a similar effect by making the lowerbranch of the rung TRUE, which also makes the output coil TRUE.But if both input A and input B are TRUE, all four switches will changestate, so neither branch of the rung will be TRUE. There will be nocontinuous current path to the output, and the coil will not turn on.
The ladder logic for the X-OR function is shown here only as a teachingaid to help familiarize the new user with the concepts of ladder logic.The HawkWin program does not require the literal duplication of digitallogic gates. HawkWin is actually much simpler to implement than digitallogic, as the following sections of this chapter will show.
The NOT or slash gives considerable flexibility to a ladder logic diagram.Suppose, for example, that a remotely-located switch is miswired, withthe wires going to the normally open (FALSE) instead of the normallyclosed (TRUE) connection points. Instead of going out to the remotelocation and rewiring the sensor, the user has the option of adding a slashin a suitable area of the ladder logic. The NOT of the slash will cancelout the NOT closed situation in the sensor, solving the problem quicklyand easily.
2-9
Figure 2-4. Hard-wired and ladder logic circuits for AND, OR, andAND-OR, also showing the Boolean expressions.
DiscreteInput
DiscreteInput
DiscreteInput
DiscreteInput
DiscreteInput
DiscreteInput
DiscreteInput
DiscreteOutput
DiscreteOutput
DiscreteOutput
LS1 LS2 SOL
LS1SOL
LS2
LS1 SOL
LS2
LS3
DI1
DI2
DI2
DI1
DO1
DO1
DO1
DI2
DI3DI1
2.1.3 Configuring Inputs With Ladder Logic
The digital or Boolean operations of AND, OR, and NOT are easy toimplement in ladder logic. As one example, in an industrial situation,there may be several “safe operating region” sensors that detect criticalsystem variables such as temperature, pressure, and speed. If any one ofthese sensors detects an unsafe situation, closes its internal switch, andbecomes TRUE, an equipment shutdown output should be triggered.
(a) AND: LS1 • LS2 = SOL
(b) OR: LS1 + LS2 = SOL
(c) AND-OR: (LS1 + LS2) • LS3 = SOL
2-8

2.2 The Sequence Diagram
2.3 Planning The ProgramSome users will start writing their programs without any kind of prepara-tion. Other users may want to do some preliminary planning. Thefollowing suggestions may be helpful:
1. Develop a good understanding of what the control system is supposedto do. Then make a list of all desired control functions such as alarm,shutdown, level and temperature detection, sequencing, and timing.
2. Make a list of all the control devices that are available for use in thesystem, such as shutdown valves, control solenoids, start and stopswitches, limit switches, and digital and analog sensors for all systemvariables of interest. Also list the system components that must becontrolled, such as pumps, fans, relays, motors, and valves.
3. Draw a flow chart showing the kinds of processes that are going to takeplace. The Hawk-I controller will be programmed to perform a numberof specific tasks or control functions such as start, shutdown, alarm, andchanging system speed or power. Once these control functions are listed,the user should ask what inputs trigger these system functions. How arethese inputs communicated to the Hawk-I, and from what kinds ofsensors? What kinds of outputs are required in response to these signals?
4. Assign the inputs and outputs of the Hawk-I to specific input andoutput terminals. For example, if you are using three different digitalliquid level sensors, they must be assigned to three pairs of discrete inputterminals. Consult the Hawk-I’s wiring diagram to get the relevant pinnumbers and then prepare an Input-Output Assignment Table. Knowl-edge of the input and output assignments is necessary to program theHawk-I.
5. Translate the previously-identified input-output functions into ladderlogic and enter this ladder logic into the HawkWin program.
The sequence diagram is the part of the Hawk-I’s programming that dealswith the ladder logic’s switches and coils. The sequence diagram does notcontain any function blocks, which are confined to the analog diagram.
The planning and organization of the sequence diagram will depend onthe particular system that the user wants the Hawk-I to control. Specificexamples of programs for particular systems are beyond the scope of thismanual. A series of AMOT Applications Notes will give detailed sugges-tions for configuring various types of control systems. This manual isaimed at giving the user the general information that is required to helpthe user set up any specific particular control system that may be needed.
2-11
Figure 2-5. Implementing an exclusive-OR gate with ladder logic.
A
BA + B
INPUT OUTPUT
B A XOR
0 0 0
0 1 1
1 0 1
1 1 0
DI1 DI2
DI1 DI2
DO1
DiscreteInput
DiscreteInput
DiscreteOutput
DiscreteInput
DiscreteInput
2.1.4 Configuring Outputs With Ladder Logic
(a) Exclusive OR truth table
(b) Exclusive OR function implement in ladder logic
(c) Exclusive OR function implemented in ladder logic
2-10
The outputs or coils are always at the right end of each rung. Coilscannot have switches between them and the right side of the ladderdiagram.
Several different coils can be activated by one rung of ladder logic. Thecoils to be activated are simply placed along the rung like beads on astring. As many coils can be activated as the rung will hold. If necessary,extra rungs can be “daisy chained” into the ladder diagram to activate avery large number of coils.
In AMOT’s ladder logic, there are 13 positions or slots on each rung.Each position can hold either a switch or a coil. Note than when func-tional blocks are inserted into the diagram, each block may be more thanone position wide. Functional blocks will be discussed later in thischapter.

Figure 2-6. Simplified example of motor control system.
LC1
OK TOSTART
HEALTHYRUN
HEALTHYRUN
HEALTHYRUN
OK TOSTART
OK TOSTART
POSTLUBETIMER
SYSTEMREADY
DISPLAY
CSD
LC3
LC3
LC1
LC1
TR12
DISP
DisplayInputs
DM1
LC2
LC2
STARTSEQUENCE
STARTSEQUENCE
LC3
CommonShutdown
START SPETS
Start key
Stop key
Speed
STOP
1
2
3
4
5
2-13
2.4 Analyzing Ladder Logic
Ladder logic is a rung-by-rung system. Each rung will have a distinctfunction. Before describing how to program the ladder logic into theHawkWin program, it will be useful to go through a number of ladderlogic rungs and analyze their individual functions in considerable detail.This will give the programmer a better understanding of how ladder logicoperates.
To analyze ladder logic, it is useful to describe slashed switches and coilsas TRUE, and unslashed switches and coils as FALSE. This will give theuser a good intuitive feeling for how the logic works, especially in rungsthat contain a large number of switches. The examples that follow arefrom a simplified motor control system, but their function is quitegeneral and can be applied to many different types of control systems.
1. Rung 1 in the motor control system (see Fig. 2-6) is an OK To Startcircuit. Only one switch (CSD, or Common Shutdown) controls the coilLC1 or OK To Start,, and CSD is shown as TRUE. Under normalconditions, the rung will be TRUE and the OK To Start circuit will beTRUE. But if CSD is activated and becomes FALSE, then the rung isFALSE, and OK To Start also becomes FALSE. Presumably, if thisCommon Shutdown command is implemented, it will go to every motorin the system as a master shutdown signal.
2. Rung 2 has only a coil (DISP) controlling the display module. Whenthere is no switch in a rung, that rung’s input will always be TRUE. Thistells us that the display module is supposed to be on under all conditions.
3. In Rung 3, we have three switches controlling the System ReadyDisplay coil UM1. All of these switches must be TRUE for the coil to beTRUE. Two of the switches are normally TRUE, namely the HealthyRun switch and the Postlube Timer switch.
The middle switch, OK To Start, is labeled LC1, the same designation asthe OK To Start coil in the first rung. This means that this switch isreferenced to the OK To Start coil. When that coil changes its condition,the switch will also change its condition, and Rung 3 will also be TRUE.
But suppose that the system is already running. Then the Healthy Runswitch will become FALSE, and the System Ready Display will also beFALSE. Once again, this prevents the operator from trying to start thesystem while it is already running.
2-12

Figure 2-7. Ladder logic for start-up horn.
A different use of sequencing is shown in Fig. 2-7. This ladder logic isdesigned to operate a start-up horn. The horn is intended to sound for apreset interval when equipment starts to operate, thus warning personnelto stand clear of moving parts such as conveyer belts.
1. Rung 1 (see Fig. 2-7) becomes TRUE when the START switch isengaged. The switch referenced to the SETUP coil latches the circuitTRUE even after the START switch becomes FALSE again.
2. In this rung, a switch referenced to the SETUP coil becomes TRUEwhen the SETUP coil becomes true. Rung 2 then becomes TRUE andstarts TMR1, which is a timer that can be set to run for a certain intervaland then shut off again.
3. Rung 3 becomes TRUE when TMR1 and SETUP are TRUE, thusturning on the start-up horn. Rung 3 remains TRUE and the hornremains on until TMR1 turns itself off, thus shutting down the start-uphorn.
Setup
Setup
Timer
LC1
LC1
LC1
Setup
TO1
DO1
START
Horn
Start key
TR1
Timer
RESET
Reset key
2-15
It is also undesirable to attempt to start the system while the PostlubeTimer is operating and putting the engine through the Postlube Se-quence. If the Postlube Sequence is still operating, the Postlube Timerswitch will be FALSE and the System Ready Display will then be FALSE,which in this case means that it is turned off.
4. Rung 4 is intended to disable the Start Sequence if the engine beingcontrolled is already running. The Start Key switch is FALSE, and theSpeed sensor is TRUE. If the start key is turned, the rung will becomeTRUE and the Start Sequence coil will also become TRUE.
However, if the engine is already running, the Speed switch will respondto the engine speed and be FALSE. Then the rung will be FALSE, andthe Start Sequence cannot be engaged. This is obviously a safety feature.
5. This rung is a little more complicated than the previous examples.Note first of all that the condition of this rung depends on the conditionof the preceding Rungs 1 and 4. Rung 1 makes OK To Start TRUE, andRung 4 makes Start Sequence TRUE. It is clear that once Rung 4becomes TRUE, Rung 5 will become true unless the Stop Key orCommon Shutdown is activated.
Note also that when Healthy Run is activated, a switch in Rung 5 that isreferenced to Healthy Run also becomes TRUE. This switch acts as alatch. Even after the Start Sequence has finished and becomes FALSEagain, Rung 5 will still be TRUE because the Healthy Run switch is stillTRUE.
The concept of the latch is very important in ladder logic sequences.For example, when starting a large engine, a more precise kind of controlis required than the manual key-turning system commonly used inautomobiles. Once cranking has begun, the engine start operation willusually be controlled by a latched-on, pre-programmed Start Sequence.This Start Sequence may, for example, keep cranking the engine until itstarts and comes up to speed on its own. If the engine does not start, theStart Sequence will continue cranking only until a preset interval such as30 seconds has passed, and then it will stop cranking. At that point theStart Sequence will automatically shut down, and cannot be initiatedagain until certain necessary operations such as Post-Lube have beencompleted.
Sequencing is critical in ladder logic. In the examples just given, it is clearthat Rung 5 cannot become TRUE until Rungs 1 and 4 are TRUE.Sequencing of this kind is a flexible and convenient way to programcontrol operations of many different kinds, especially when timers areused.
2-14

Figure 2-8. Ladder logic for sequential motor turn-on.
Motor
LC1
LC1
LC1
Internalcoil/contact
Internalcoil/contact
Internalcoil/contact
DO1
DO2
TO1
DO1
START
Timer 1
Timer 1
Start key
Motor 1
Motor 2
STOP
STOP
Stopkey
Stopkey
TO2
DO2
Timer 2
Timer 3
Motor 2
STOP
Stopkey
TR1
DO3
Timer 2
TR2
The unsafe method of wiring the Emergency Stop function is to use anexternal push button that is normally open or FALSE. Pushing thebutton would make the external circuit TRUE, signaling the Hawk-I tomake its internal Emergency Stop switches also TRUE. But if theequipment is set up in this way, a break in the wiring will make theEmergency Stop button useless. Furthermore, this problem might notbecome apparent until an emergency actually occurred. The programmershould carefully avoid this dangerous situation.
2-17
Note the Reset switch. When Rung 1 is latched to TRUE, it will changeto FALSE and turn off the horn instantly whenever the reset switchbecomes FALSE. In this case, the reset switch might be a normally-closed(NC) push button switch. Safety or emergency stop switches are oftenconnected in this way.
Ladder logic can also be used to turn on a series of motors, one by one,with specified timing intervals (Fig. 2-8).
1. Rung 1 is a typical start-up rung that contains emergency stop andlatch functions. The Emergency Stop switch is TRUE unless and untilthe external emergency stop push button is activated. When Startbecomes TRUE, the rung becomes TRUE. Internal coil 1, which existsonly in the software, then becomes TRUE. The switch referenced toInternal 1 also becomes TRUE and latches the rung TRUE even after theStart switch or push button becomes FALSE again. 2. This rung uses aswitch referenced to Internal 1 to make Output M1 TRUE. This outputturns on the first motor in the sequence, which is Motor 1.
3. In Rung 3, when the switch referenced to M1 becomes TRUE, andalso if the Emergency Stop switch is TRUE, the rung becomes TRUEand TMR1 is activated. TMR1 will become TRUE not immediately, butafter a preset interval of 30 seconds.
4. In this rung, when TMR1 becomes TRUE, Output M2 becomesTRUE and turns on Motor 2.
5. In Rung 5, a switch references to Output M2 becomes TRUE afterOutput M2 becomes TRUE. If the Emergency Stop switch is TRUE,TMR2 will begin its pre-programmed countdown of 30 seconds.
6. In this rung, when TMR2 becomes TRUE after 30 seconds, OutputM3 becomes TRUE and turns on Motor 3.
Note that each rung is very simple. This kind of simplicity makeschecking and debugging the program much easier. Complicated rungscan cause problems. The Hawk-I has 500 rungs available to the program-mer, so there is no need to pack a lot of functions into one single rung.
Programming any kind of an emergency function requires great care.For example, the Emergency Stop function can be programmed in twodifferent ways. The safe way is to have the external Emergency Stop push-button normally TRUE or closed. Then the Emergency Stop switches inthe ladder logic will be activated when the external circuit opens andbecomes FALSE. Note that if the external wiring is broken, the Emer-gency Stop circuit will immediately become FALSE and the equipmentwill stop operating.
2-16

3. INSTALLING HAWKWIN3.1 Host PC Requirements
AMOT’s proprietary HawkWin computer program requires a host PCwith the following minimum capabilities:
• IBM-compatible computer with an 80386 or faster microprocessor.
• Microsoft Windows 95™
• At least 4 MB of RAM
• 3.5 inch disk or CD drive
• VGA, EGA, XGA, or any other video adapter supported by MicrosoftWindows 95™
• 256-color video adapter and compatible Microsoft Windows 95™
• Microsoft mouse or compatible pointing device
• Serial Port
3.2 Installing the HawkWin Program
The software loading procedure is as follows:1. Make a copy of the HawkWin disk and use the copy for the installa-tion. Store the original HawkWin disk in a safe place.
2. Make sure that Windows 95 is running on your computer. Close anyopen applications. The desktop should be displayed on the computermonitor.
3. Insert the copy disk of HawkWin into Drive B, or whichever driveaccepts 3.5 inch, high-density magnetic disks.
4. Click on START, then click on SETTINGS, and then double click onthe ADD/REMOVE PROGRAMS icon. Windows 95 will now look intoyour floppy disc drive for the HawkWin program. From this pointonward, following the prompts on the computer screen is all that isnecessary to install HawkWin.
5. When HawkWin is successfully installed on your host computer,remove the diskette from the floppy drive and store it in a safe place.
3-1

4.1.4 Window Environment
4.1.5.2 Complete Rung
This is the double-ended arrow icon. When a box has beenselected in a rung, clicking this icon will create a horizontalline across the rung in the sequence diagram.
4-2
4.1.5 AMOT Icons
The HawkWin main screen features pull-down menus, toolbar-icons, a treeview on the left, and a pane on the right to write the program.The tree view provides an overview of your hardware hierarchy showing themain unit with all inputs and outputs. Expand the list by clicking on the plussign for each branch. You can access the parameters of each component onthe tree view by double-clicking on the component.
The toolbar at the top of the HawkWin screen shows a number of icons.The first 7 icons are standard Window icons, the rest are HawkWinspecific icons. Clicking on these icons will bring their associated dialogboxes onto the screen.
4.1.5.1 Navigation Panel
Clicking this icon will show/hide the tree view on the left.
4. USING HAWKWIN
4.1 The Hawkwin ProgramThe HawkWin program will have a familiar feel to anyone who isaccustomed to the Windows environment. Most operations are carriedout by pointing and clicking with an ordinary computer mouse. Thetoolbar icons and the dialog boxes are designed for easy and intuitive use.
4.1.1 The Ladder Logic DiagramBefore starting to program with HawkWin, the user may decide to sketchout the ladder logic program on a piece of paper. This may make it easierto concentrate on the actual programming task. Putting a ladder logicprogram on paper also allows for any necessary review by other personnelbefore actual programming is undertaken.The programmer may prefer to start the programming process with aflowchart that describes the process to be controlled in a sequentialmanner. Sequences and relationships that are hard to extract from generalprocess descriptions become much more obvious when expressed inflowchart form. Once the flowchart is completed, then the programmercan use either logic gates or contact symbology to implement the logicsequences that the flowchart requires.Logic gates will express a logical output sequence as a function of inputconditions, while PLC contact symbology will directly implement thelogic necessary to program an output rung. Some programmers use acombination of both methods to clarify the programming that must beperformed.
4.1.2 Input-Output TablesThe assignment of inputs and outputs is a vital part of the preparationrequired for programming. The programmer should draw up an I/Oassignment table that documents and organizes the inputs and outputs ofthe Hawk-I. The programmer will need this information when it is timeto label inputs and outputs in the ladder logic diagram. If every step ofthe programming is fully documented, any problems that may arise canbe dealt with much more easily.
4.1.3 Modernization of Relay SystemsIn some cases, the Hawk-I may be replacing an older, hard-wired relaycontrol system. In such situations, the existing relay logic must betranslated into a suitable ladder logic diagram. The programmer shouldbe alert to the fact that relays may be contributing program functionssuch as contact closure delay that will not appear in an ordinary logicdiagram. The Hawk-I will not have such internal delays unless they arespecifically programmed into the ladder logic diagram with a timer.
4-1

This is the cable ends icon. Clicking this icon will cause theStandard I/O Configurations dialog box to appear:
The Configuration box offers one or more choices. Click on a choice, then clickCustomize. The Configure Inputs and Outputs dialog box will appear:
This dialog box includes choices for analog and discrete inputs and outputs and atachometer input. The default tab is “Discrete Inputs”.
4-4
4.1.5.4 Standard I/O Configuration
Clicking a selection in the Object List will display numbered Instances(if any were previously created) of the Object. Selecting a numberedInstance and clicking OK inserts the Object/Instance in the SequenceDiagram at the place designated.
In the following example we placed a discrete input:
4-3
4.1.5.3 Select Object
This is the playing cards icon. Clicking this icon will cause theSelect Object to Place dialog box to appear:

4-6
Click Parameters; a Discrete Inputs dialog box will appear:
At the upper right, select Polarity (NO or NC) as desired.(“Normal” is defined as the state of the contact when a healthy condition exists.)
At the lower left, click Class selection as desired:
-Class A is always monitored.
-Class B is monitored when a timer expires or when and after it becomes healthy.
-Class b is monitored when a timer expires.
-Class C is monitored when and after it becomes healthy.
At the upper center, click Alarm or Shutdown selection as desired.
-Alarm will signal an abnormal condition.
-Shutdown will stop operation of the machine.
At the center, key in any Descriptive Text (input nomenclature) desired.Click OK.
4-5
Click Configure Individual; the Discrete Inputs dialog box will appear:
Click Select All, Deselect All, or individual Discrete Inputs asdesired and then click Apply.

4-8
At the upper left (Pulses /Rev.), key in the number of pulses that theMagnetic Pickup will see for one revolution of the engine.
At the top center (Resolution) you can select how often the readingis updated.At the right, key in desired Speed Values (RPM) for Overspeed,
Underspeed, CTS (Crank Termination Speed), and Purge (enginepurge speed).
At the lower left, key in Descriptive Text as desired. By clicking OKyou will go back to the Configure Inputs and Outputs screen.
At the lower right, click Parameters. The Analog Inputs dialog box will appear:At the upper center, click Analog Inputs tab to highlight it:
4-7
Click the Discrete Outputs tab to highlight it:
At the center, use arrow buttons to select Number of Outputs (totalnumber of Discrete Outputs).
Click OK.
At the upper left, click Tacho. Inputs tab to highlight it:
At the lower right, click Parameters. The Engine Speed Valuesdialog box will appear:

Clicking this icon makes the Choose Parameter Groupdialog box appear:
Double clicking a selection in the Parameter Group list will cause theappropriate dialog box to appear. This will permit the programmer to setall the variables that must be defined to set up the function of thatparticular program element.
4-10
4.1.5.5 Parameters
4-9
At the upper left, click Input Type (thermo couple J or K, 4-20 mA or RTD).
If you selected a type of thermocouple:
At the left center, click desired Range of thermocouple to optimizeperformance/accuracy. (Customized narrows the range that Hawk-I sees.)
If you selected 4-20 mA transducers, at the lower left, click the desiredcurrent input display Units:
Milliamperes (Milliamps) or engineering units (User Units).
Calibration is done by defining the true values of the 4 and 20 mA points.
At the left side, click desired Class or None:-Class A is always monitored.-Class B is monitored when a timer expires or when and after it becomes healthy.-Class b is monitored when a timer expires.-Class C is monitored when and after it becomes healthy.
At the upper center, key in Alarm Setpoints values for Lower and Upper limits,and click Enable.
At the upper right, key in Shutdown Setpoints values for Lower and Upper limits,and click Enable.
At the right side, select the desired action in the event of Sensor Failure (andkey Value) if Forced to Value is selected.User can filter out incoming noise by entering a value in Filter.
At the lower left, click the desired display units of temperature (DegreesC or Degrees F).

Click this icon to download the program from the PC to theHAWK-I™. A progress bar will be displayed.
4.1.5.8 Download
4.1.5.9 Upload
Click this icon to upload the program from the HAWK-I™ tothe PC. A progress bar will be displayed.
Selecting this icon brings the following screen to the forefront.
4.1.5.10 Simulate
When clicking “Run”, the application program developed inHawkWin™ runs on the PC. The two-line display of the HAWK-I™ isalso simulated on the PC screen.You can close any contact by selecting it on the Sequence Diagram andthen clicking the Hlthy button. Selecting Unhty will open this contact.
4-12
The bottom of the screen displays the state of the 12 digital outputs:Green = TRUE, Red = FALSE.The scrollbar on the right enables speed to be simulated.
This icon brings the Sequence Diagram at the forefront (default).
For further explanation see next Chapter “Getting Started.”
4-11
4.1.5.6 Sequence Diagram
This icon brings the Analog Diagram at the forefront.
4.1.5.7 Analog Diagram
For further explanation see next Chapter “Getting Started.”

Selecting this icon brings the following screen to the forefront.
4.1.5.12 Quickblock
The Quickblock screen displays on the PC the states of all Digital Inputsand Outputs, as well as the value of all Analog Inputs and Outputs.Any defined Analog User Input will also be displayed. Tachometerreading and value of Runtime Meters will be indicated.
Note: This mode also uses the serial port. This port then becomes unavailablefor any other application. You have to click the Close Button to exit theQuickblock view.
4-14
4.1.5.13 About
This indicates the current version of HawkWin™
Selecting this icon starts the Monitor Sequence. Clicking the iconagain will exit the Sequence.
4.1.5.11 Monitor
When monitoring, the states in the Sequence Diagram, which are TRUEwill appear in green. The states which are FALSE will appear in red.When monitoring, all Analog values will be displayed in the AnalogDiagram.
To monitor, the PC needs to be connected to the HAWK-I™, whichshould be in the Run Mode.
Note: This mode uses the serial port. This port then becomes unavailable forany other application.
4-13

3. In the Object List, click on the type of object desired for insertion.In the example below, the object chosen is a Class B:
At the top of Sequence Diagram, clicking the “playing cards” iconwill cause the Select Object to Place dialog box to appear:
Clicking a selection in the Object List will display numbered Instances(if any were previously created) of the Object. Clicking New Instancewill create an Instance of an Object. Selecting a numbered Instance andclicking OK will insert the Object/Instance in the Sequence Diagram atthe place designated by the rectangle.
5-2
5.1 Building the Sequence Diagram
1. In the Windows program, click on HawkWin™ to open it. Thesequence diagram will appear.
2. In the displayed sequence diagram, click on the desired location for thecenter of the first object. A broken-line box will appear at this location:
5. GETTING STARTED
5-1
There are several ways to write a program in the sequence diagram.
One is to configure all inputs and outputs from the beginning. Theyare then available for use by the programmer.
The second method presented here is to define the objects as wedevelop the program.

7. When you have inserted all desired objects on the rung, click on oneof them.
8. Then click the Toolbar’s double-ended arrow icon this actionwill insert a horizontal line linking the various objects:
5-4
9. You can add comments for each rung on the left margin by simplyclicking on the left of the rung.
10. You can as well add a title to your program by clicking anywhereabove the first rung.
12. When you are satisfied with the rung layout, open the File menu, givethe diagram a file name, and save it.
11. The first rung marked by a “P” is always evaluated by the processor,regardless of the other rungs. Therefore all shut-down logic should beplaced on this first rung.This guarantees that the system can shut down even if the HAWK-I istrapped in a continous loop within a subroutine.
CBECBE
Class BClass B
CBE
Class B
4. At the upper corner, click OK. The object appears at the locationdesired:
5. Click on the object to select it. Pressing the keyboard space bar willstep through the other options available:
6. To insert other objects on the rung, repeat steps 2 through 6 (seeexample below):
5-3

TO DELETE A LINE SEGMENT
TO CHANGE DESCRIPTIVE TEXT BELOW AN OBJECT
1. Double-click the object. The Edit Object Info box will appear.2. In the Object Descriptive Text window, type the text desired and click
OK. The dialog box will disappear and the text you typed will appearbelow the object.
Sequence Diagram symbols include label variations of the images that areavailable from the “deck of cards” menu. After the basic symbol isinserted in the diagram, you can change it by selecting it and pressing thekeyboard space bar to cycle through the symbol’s various. Here are someexamples of contact symbols.
When using physical contacts: When using logical contacts:
Closed contact
Open contact Unhealthy
Coil on when rungis satisfied
Coil off when rungis satisfied
EXAMPLES OF COIL SYMBOLS
DI1
???
DI1
???
DI1
???
DI1
???
CBE
CommonShutdown
CBE
CommonShutdown
5-6
Healthy
2. Press the DELETE key. The line segment within the broken line box willdisappear.
1. Click on the line segment. A broken line box will appear.
Modifying the sequence diagram requires the followingkeyboard operations.
TO INSERT AN OBJECT IN A RUNG
1. Go to the desired rung and horizontal location using the vertical scroll bars.2. Click at the desired location for the coil. A broken-line box will
appear.3. In the toolbar, click the “playing cards” icon.
The Select Object To Place dialog box will appear.4. In the Object List Dialog box, click the object desired.5. In the Instances list, click the instance desired.6. Click OK. The dialog box will disappear and an object will appear in
the broken-line box.7. Click the object. Press the keyboard space bar to step through the
various choices available.
TO DELETE AN OBJECT FROM A RUNG
1. Go to the object using vertical and horizontal scroll bars.2. Click the object. A broken-line box will appear around the object.3. Press the DELETE key. The selected object will disappear.
TO FILL IN A HORIZONTAL LINE OF A RUNG
1. Click anywhere on the rung. A broken-line box will appear.2. In the Toolbar, click the two-headed arrow icon. A horizontal line will
fill the rung.
TO DRAW A LINE SEGMENT
TO MOVE AN OBJECT FROM ONE RUNG TO ANOTHER
1. Go to the object using vertical and horizontal scroll bars.2. Click the object. A broken-line box will appear around the object.3. In the Toolbar, click the scissors icon. The object will disappear.4. Go to the desired new location for the object and click.5. In the Toolbar, click the paste icon. The object will reappear in the
location desired.
1. Click at the desired location of the line segment. A broken-line boxwill appear, centered on a point (+).
2. Within the box, point to the desired location of the line segment (leftor right, above or below the center).
3. Click and hold the right mouse button, then drag the cross to draw aline segment.
5-5

3. In the Hawk-I Toolbar, click the “playing cards” iconThe Select Object To Place dialog box will appear:
5-8
4. In the dialog box Object List, click on the type of object desired forinsertion.In the example below, the object chosen is Analog Input 1.
5. At the upper right corner, click OK. The object chosen will appear atthe location desired:
5.2 Building the Analog Diagram
1. In the Toolbar, click the “sine wave” iconThe analog diagram layout screen will appear:
5-7
2. In the analog diagram layout, click the location where you want to putthe first object. A broken-line box will appear at the location chosen:

5-10
5.3 Miscellaneous
1. It is nescessary to configure the communication port to communicateproperly with HAWK-I™ for download/upload.By using the pull-down menu “Transfer” and “Configure Port”, youwill access the following screen:
2. To document the program you can enter information about theauthor and description of the program in the following screen:
This screen is accessible using the pull down menu “Edit” and“Program Info”.
5-9
6. Double-click on the object to select it. The Edit Object Informationdialog box will appear:
7. In the Edit Object Info dialog box, make any changes desired andthen click OK.
8. To insert another object on the analog diagram, repeat steps 2 through 8.To delete an object, click it and press Delete.To copy an object, click it and press Ctrl-c or click the copy buttonon the tool bar then click on the desired location and press Ctrl-v, orclick the paste button on the tool bar.To link objects with connection lines, click between objects.A broken line box will appear, centered on a point (+).Double-clicking the right mouse button to the left, right, above, orbelow the point will create a line segment at the place clicked. Toremove a line segment, double-click the right mouse button on it.
9. When you have inserted all the desired objects on the diagram, checkthe layout for accuracy.

Any Input can be assigned a class. We define four different classes.
-Class A is always monitored.
-Class B is monitored when a timer expires or when and after it becomes healthy.
-Class b is monitored when a timer expires.
-Class C is monitored when and after it becomes healthy.
When a Class A input becomes closed, a message is automatically displayed onthe HAWK-I™ screen. This is defined as “first-out annunciation.”This event is also automatically recorded in a log which can store up to 64 events.
Classes B, b, C will produce the same result when they are enabled. It is thennecessary to use their associated coils in the sequence diagram to make them active.
5-11
3. Important note: HawkWin™ has been developed to take fulladvantage of class logic.

6-1
6. OBJECT DESCRIPTIONS
6.1 AMOT Ladder Logic Programming
Ladder logic is a symbolic programming method that is used to create PLC programs.As both PLCs and PLC applications have become more advanced, their ladder logic programs havebecome more complex. AMOT’s ladder logic is an enhanced programming method that containsmany pre-programmed functions of considerable sophistication.
To proceed with the necessary programming tasks, the experienced PLC programmer mayrequire little more than a glossary of AMOT’s HawkWin™ ladder logic language. The follow-ing pages provide this information.
Section 5.2 gives an alphabetical index of the ladder logic objects that are available in HawkWin™.Section 5.3, which is also alphabetical, describes each object in detail.
Note that the letter “S” adjacent to the object title indicates that the function is available in theSequence Diagram. The letter “A” adjacent to the object indicates that the function is available inthe analog diagram. Some objects are available in both diagrams.

6.2 Index of Objects
OBJECT ............................................................. PAGE
6-2
ADD CONSTANT -ADK-- (A) ..................................................... 6-6ADDITION -ADD- (A) ................................................................ 6-7ANALOG INPUT -AI- (S) (A) ......................................................... 6-8ANALOG OUTPUT -AO- (A) ....................................................... 6-11ANALOG USER INPUT -AUI- (S) (A) ......................................... 6-12ANALOG USER OUTPUT -AUO- (A) ......................................... 6-14AUTO/MANUAL -AM- (S) (A) ..................................................... 6-15BITWISE AND -AND- (S) ............................................................ 6-17BITWISE OR -OR- (S) ................................................................. 6-19BITWISE XOR -XOR- (S) ............................................................ 6-20CLASS B -CB-, CLASS b -CLB-, CLASS C -CC- (S) .................... 6-21COMMON ALARM -CA-, COMMON SHUTDOWN -CS- (S) ... 6-22CONFIGURE DISABLE -CD- (S) ................................................ 6-23COSINE -COS- (S) ...................................................................... 6-24COUNTER -CN- (S) .................................................................... 6-25DATE/TIME -DT- (S) ................................................................... 6-27DISCRETE INPUT -DI- (S) ......................................................... 6-28DISCRETE OUTPUT -DO- (S) ................................................... 6-30DISPLAY INPUTS -DISP- (S) ...................................................... 6-31DISPLAY MESSAGE -DM- (S) ..................................................... 6-32DIVIDE BY CONSTANT -DVK- (A) ............................................ 6-34DIVISION -DIV- (A) .................................................................... 6-35EQUALITY -IEQ- (S) .................................................................... 6-36GREATER THAN -IGT- (S) .......................................................... 6-37GREATER/EQUAL -IGE- (S) ........................................................ 6-38GROUP AVERAGE -GA- (S) (A)................................................... 6-39INEQUALITY -INE- (S) ............................................................... 6-41
6-3
LESS/EQUAL -ILE- (S) ................................................................. 6-45LIMIT VALUE -LM- (A) ............................................................... 6-46LINKED SHIFT LEFT -SLL- (S) .................................................. 6-47LINKED SHIFT RIGHT -SRL- (S) .............................................. 6-48LOGICAL COIL/CONTACT -LC- (S) .......................................... 6-49MAXIMUM -MAX- (A) ................................................................ 6-50MINIMUM -MIN- (A) .................................................................. 6-51MULTIPLEXER -MUX- (A) ......................................................... 6-52MULTIPLICATION -MUL- (A) ................................................... 6-53MULTIPLY BY CONSTANT -MLK- (A) ...................................... 6-54NATURAL EXPONENT -EXN- (S) ............................................. 6-55NATURAL LOG -LN- (S) ............................................................. 6-56NEGATION -NAG- (A) ................................................................. 6-57ONE SHOT -OS- (S) .................................................................... 6-58PID CONTROLLER -PID- (S) (A) ............................................... 6-59PRINT MESSAGE -PM- (S) ......................................................... 6-61PWL TABLE -TBL- (A) ................................................................. 6-62RAISE TO POWER -XˆY- (S) ........................................................ 6-63RAMPING MUX -RMP- (A) ........................................................ 6-64RATE LIMIT -RAT- (A) ................................................................ 6-66RESET KEY -KRS- (S) .................................................................. 6-67RUNTIME METER -RTM- (S) (A) ............................................... 6-68SCALE VALUE -SC- (A) ................................................................ 6-69
OBJECT ............................................................. PAGE
INVERSION -INV- (A) ................................................................. 6-42JUMP TO SUBROUTINE -JS- (S) ................................................ 6-43LESS THAN -ILT- (S) ................................................................... 6-44

OBJECT ............................................................. PAGE
SPEED -SP- (S) (A) ....................................................................... 6-84SPLIT RANGE -SRC- (A) ............................................................. 6-85SQUARE ROOT -SQR- (S) ........................................................... 6-86START KEY -KST- (S) .................................................................. 6-87STOP KEY -KSP- (S) .................................................................... 6-88SUBTRACT CONSTANT - SBK- (A) ........................................... 6-89SUBTRACTION -SUB- (A) .......................................................... 6-90SYSTEM FUNCTIONS -SYS- (S) ................................................. 6-91TANGENT -TAN- (S) .................................................................... 6-92TIMER -TM- (S) ........................................................................... 6-93TOGGLE -TG- (S) ........................................................................ 6-95USER ALARM/SHUTDOWN -AS- (S) ......................................... 6-96
6-4
SEQUENCE MATH COPY -ICP- (S) ........................................... 6-70SEQUENCE MATH ADDITION -IAD- (S) ................................. 6-71SEQUENCE MATH SUBTRACTION -ISB- (S) ........................... 6-72SEQUENCE MATH MULTIPLICATION -IML- (S) .................... 6-73SEQUENCE MATH DIVISION -IDV- (S) ................................... 6-74SEQUENCE MATH MODULUS -MOD- (S) ............................... 6-75SEQUENCE TO ANALOG -SA- (S) (A) ........................................ 6-76SEQUENCE USER INPUT -SUI- (S) ........................................... 6-77SEQUENCE USER OUTPUT -SUO- (S) ..................................... 6-78SETPOINT CONSTANT -SK- (A) ................................................ 6-79SETPOINT VARIABLE -SV- (A) ................................................... 6-80SHIFT LEFT -SL- (S) .................................................................... 6-81SHIFT RIGHT -SR- (S) ................................................................ 6-82SINE -SIN- (S) .............................................................................. 6-83
6.3 List of Objects
6-5

ADDITION -ADD- (A)
Description: This analog function adds its two input values toproduce its output value.The operation is OUTPUT_VAL = INPUT_VAL_A + INPUT_VAL_B.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-7
ADD CONSTANT -ADK- (A)
Description: This analog function adds a specified constant to itsinput to produce its output value.The operation is OUTPUT_VAL = INPUT_VAL + CONSTANT.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
6-6
Parameters:1) Constant

ANALOG INPUT -AI- (S) (A)
Description: The analog inputs reflect the values read by thethermocouple, and 4-20 mA loop inputs. The value produced is thetemperature for the thermocouple inputs or the RTD or a user-scaledvalue for the 4-20 mA loop inputs. There are also four setpoints, twoalarm and two shutdown. In addition to being used by Class logic, thesesetpoints can be used to activate corresponding contacts in the SequenceDiagram, usually when the analog input is assigned a Class of NONE.
6-8
Sequence Diagram Services:Alarm LO contactAlarm HI contactShutdown LO contactShutdown HI contact.
Class: Assignable
Alarm/Shutdown: Assignable.
The Analog Input Object is primarily used in the AnalogDiagram as an input to another object.Double-click on it to access its definition.
6-9
Parameters:1) Class -A, B, b, C, or NONE2) Type - Type J T/C, Type K T/C, 4-20 mA loop, RTD3) Units - Depends on type selected4) Alarm LO setpoint (with ENABLE)5) Alarm HI setpoint (with ENABLE)6) Shutdown LO setpoint (with ENABLE)7) Shutdown HI setpoint (with ENABLE)8) Sensor Fail action - Keep last valid value or Force to value9) Sensor Fail force-to value.
In addition, if the type selected is 4-20 mA loop, and user Units isselected, the following Parameters are accessible:
1) 4 mA scale value2) 20 mA scale value3) Units Text
The user may apply a low-pass filter on the incoming signal to minimizethe effects of noise. HawkWin™ will automatically calculate the cutofffrequency for the filter, by converting the value in seconds from the filterfield.

You can also use the Analog Input Object in the Sequence Diagram.
By pressing the spacebar you can select the relevant state of the object.For instance you can select the set of contact representing the highshutdown value.This contact will then close when the Analog Input reaches the highshutdown value.
6-10
ANALOG OUTPUT -AO- (A)
Description: The analog outputs drive the 4-20 mA loop outputs.The physical outputs can actually be driven from 0 to 24 mA. The analogoutput function takes an analog diagram value and scales it, based onuser parameters, to a physical current output.
6-11
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Input value corresponding to 4 mA2) Input value corresponding to 20 mA.
The Analog Output Object needs tohave an input on its left side.
Double-click on it to define therange of values driving the 4-20 mAoutput.
NOTE::In this version of HawkWin™, userscan only select a Current Output.

ANALOG USER INPUT -AUI- (S) (A)
Description: An analog user input is a value that may be input eitherin View mode from the front panel keyboard or from the Modbuscommunications. The value can be changed by the Hawk-I™ key padfrom within View Mode by using the UP and DOWN keys.
Sequence Diagram Services:Coil.
Class: N/A
6-12
Alarm-Shutdown: N/A
Parameters:1) Analog value2) Force value3) Minimum Limit4) Maximum Limit
A default value is provided forpower on conditions (Analog Value).The Min and Max limits areprovided to prevent the user fromtaking the Analog User Inputoutside of a predefined range.
The Force Value parameter can be set in the Sequence Diagram byenergizing the AUI coil. This allows the user to set a given value into theAnalog diagram at a particular set of events in the Sequence.
6-13

ANALOG USER OUTPUT -AUO- (A)
Description: An Analog User Output allows the user to take anyanalog value available in the Analog Diagram and make it available fordisplay as part of a User Message and/or to make the value available viathe communications.
6-14
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/AThis object has no parameters.
AUTO/MANUAL -AM- (S) (A)
Description: This coil provides “bumpless” transitions betweenmanual and automatic operating modes. If this coil is TRUE, then thesystem is in manual mode. If this coil is not TRUE, then the system is inautomatic mode.
6-15
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Display line2) Range (0-1 / 0-100)3) Display Text — Same display operation as Display Message
When the coil is INACTIVE, the Auto/Manual function is in Automode, passing it’s input directly to it’s output. When the coil goesACTIVE the current input value is copied into the internal ManualValue register, and the Display Text is written to the display. While thecoil is active this value can be increased or decreased over the full outputrange. To view this manual value the Display Text should include thecorresponding Auto/Manual display specifier e.g. “@M1”
Use this object in the Analog Diagram.

This object is generally used in conjunction with the PID object.It gives the ability to “manually” drive the output of the PID.
6-16
The Auto/Manual Object should be activated from the SequenceDiagram using the associated coil. When activated, the PID object isautomatically deactivated.
6-17
BITWISE AND -AND- (S)
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Description: The AND function performs a logical bitwise AND ontwo registers or alternatively a register and a constant, this is useful whenworking with bit packed data.
The coil service allows the destination register to be set according to theresult of the logical operation.

The registers must be in unsigned word format and either or bothregisters may be indexed to allow programmatic selection of an objectinstance.Either of the registers (providing it is not a constant) is defined as thedestination, which is then updated to contain the result.
6-18 6-19
BITWISE OR -OR- (S)
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
Description: The OR function performs a logical bitwise OR on tworegisters or alternatively a register and a constant, this is useful whenworking with bit packed data. The coil service allows the destinationregister to be set according to the result of the logical operation.
Sequence Diagram Services:Coil
As for the BITWISE AND object, the registers must be in unsigned wordformat and either or both registers may be indexed to allow program-matic selection of an object instance. Either of the registers (providing itis not a constant) can be defined as the destination, which is thenupdated to contain the result.

6-20
BITWISE XOR -XOR- (S)
Description: The XOR function performs a logical bitwise exclusiveOR on two registers or alternatively a register and a constant, this is usefulwhen working with bit packed data. The coil service allows the destinationregister to be set according to the result of the logical operation.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
Identical to the BITWISE AND object, the registers must be in unsignedword format and either or both registers may be indexed to allow program-matic selection of an object instance. Either of the registers (providing it isnot a constant) can be defined as the destination, which is then updated tocontain the result.
CLASS B -CB-, CLASS b -CLB-, CLASS C -CC- (S)
Description: The Class functions allow the respective classes to beenabled (e.g., monitored).By definition, Class A functions do not require a coil. They are alwaysenabled and are never bypassed. Class A functions should prevent start-up, and should initiate shutdowns immediately.Class b functions are enabled after the expiration of the Class Btimer. They are used for inputs such as vibration that should beignored during the start sequence, but which must become healthywithin a given time period.Class B functions, such as lube oil pressure, are activated a short timeafter start-up when the Class b Timer expires or a healthy state is reached.Class B is especially useful when the Class b timer is set for a relativelylong time period.Class C inputs, such as compressor suction pressures, are activated onlyafter that channel reaches a healthy state for the first time.
6-21
Sequence Diagram Services:
Class: N/A
coilcontact.
Classes B, b and C should be enabled using their respective coils to beoperational. This is done in the Sequence diagram.
Note that Class functions can be disabled. This is useful during a systemshutdown, to ensure that the Hawk-I™’s display will not be cluttered byirrelevant Alarm or Shutdown messages.
Parameters: N/A

COMMON ALARM -CA-, COMMON SHUTDOWN -CS- (S)
Description: These contacts become TRUE whenever there is anunhealthy alarm condition (for COMMON ALARM contact) or anunhealthy shutdown condition (for COMMON SHUTDOWNcontact). This is basically an OR function. Any designated unhealthycondition or tripped sensor that is assigned a CLASS and that CLASScoil is enabled can activate a COMMON ALARM or COMMONSHUTDOWN.
6-22
Sequence Diagram Services:Contact.
Class: N/A
Alarm/Shutdown: N/A
The COMMON SHUTDOWN is generally used on the first rungmarked with a “P”, as this rung is always evaluated by the processor.
Parameters: N/A
CONFIGURE DISABLE -CD- (S)
Description: This object prevents the Hawk-I™ from going intoCONFIGURE mode when, for example, a system is up and running.Whenever this coil is TRUE, CONFIGURE mode cannot be switchedon, even when the CONFIG LINK contacts on the back of the Hawk-I™ are shorted. This is a safety feature that prevents configurationactivities from taking place while the controlled system is operating.
6-23
Sequence Diagram Services:Contact.
Class: N/A
Alarm/Shutdown: N/A
Warning:The program should allow the operator to override this coil in order to beable to upload or download the program.
Parameters: N/A

6-24
COSINE -COS- (S)
Description: The COS function takes a single floating point registerand calculates the cosine. The result is returned to this register whichmust be a floating point value. The register may be indexed to allowprogrammatic selection of an object instance.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
COUNTER -CN- (S)
Description: A counter functions similarly to a T-ON timer, exceptthat the counter counts activations of its PULSE coil rather than seconds,as does a timer.Our counter can only count up.The counter is enabled and its value set to zero when the ON coil isactivated. The counter counts on the leading edge of an inputpulse. When the ON coil goes inactive, the counter rests, so thatthe next time the ON coil goes active, the counter will begincounting up from zero again.The current counter value may be displayed in a display message or printmessage (see Display Message and Print Message descriptions). Thecurrent counter value may also be accessed via Modbus.
Sequence Diagram Services:ON coilPULSE coilRUNNING contactDONE contact.
Class: N/A.
Alarm/Shutdown: N/A.
Parameters:1) Counter preset - the value up to which the counter counts2) Counter minimum - the minimum counter preset which
can be entered from the front panel3) Counter maximum - the maximum counter preset which
can be entered from the front panel.
6-25

6-26
Counter Increment:
Counter Running:
Counter Done:
The counter actually increments its countwhen its PULSE coil goes from inactive toactive.
The RUNNING contact will be TRUEwhile the ON coil is active and the counterhas not counted to its preset value.
When the counter reaches its preset value,the RUNNING contact will go FALSE andthe DONE contact will go TRUE for aslong as the ON coil remains active.
DATE/TIME -DT- (S)
Description: This function can be set to trigger on any specifiedtime or date. It can change its state every midnight, or every Monday. Itcan also function in an OR fashion, triggering every Monday, everyWednesday, every Friday, or every hour. The DATE/TIME function ispowered by a master clock that has a battery backup. The master clockcan be set or reset from the front panel of the Hawk-I™.
6-27
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Month (with ENABLE)2) Date (with ENABLE)3) Day of week (with ENABLE)4) Hour with ENABLE)5) Minute (with ENABLE)

DISCRETE INPUT -DI- (S)
Description: A discrete input contact reflects the condition of thecorresponding physical discrete input connection. A discrete sensor suchas a switch is connected to the two terminals of a discrete input. Thissensor can either be open (not connected) or closed (continuity existsbetween the two terminals). Depending on the design of the sensor,either the open state or the closed state can be the healthy condition.When the open state is healthy, the sensor is Normally Open (NO).When the closed state is healthy, the sensor is Normally Closed (NC). Adiscrete input is assigned a Contact state (NO or NC) and a Class such asA, B , b, or C. If the Class is other than NONE, then the discrete inputwill generate an Alarm or a Shutdown when the input goes to theunhealthy state.
Sequence Diagram Services:Contact
Class: Assignable
Alarm/Shutdown: Assignable
6-28
Parameters:1) Class - A, B, b, C, or None2) Action - Alarm or Shutdown (valid if Class is A, B, b, or C)3) Contact - Normally Open (NO) or Normally Closed (NC)
6-29
In the Sequence Diagram, a discrete input contact will reflect either thephysical or logical state of the physical input, depending on what waschosen in the discrete input configuration menu. When discrete inputcontacts are configured to reflect physical states, then a discrete inputcontact will be TRUE when the sensor is closed. When the inputs areconfigured to reflect logical states, then a discrete input contact will beTRUE when the sensor state matches the contact state.

DISCRETE OUTPUT -DO- (S)
Description: A discrete output physical contact reflects the state ofthe corresponding output coil. When the coil is active, then a discreteoutput which is a relay will be closed, and a discrete output which is arelay driver will be in the ON state, i.e., able to sink current to ground.The Set and Reset coil functions perform a latching function. The outputgoes to the corresponding state when the coil becomes active, andremains in that state even when the coil becomes inactive. The outputwill not change state until the opposite coil is activated to force theoutput into the opposite state.
6-30
Class: N/A.
Alarm/Shutdown: N/A.
Parameters:1) Configure State -
the state the output willenter in configure mode.
DISPLAY INPUTS -DISP- (S)
Description: This coil enables the built-in rolling input displayfunction. When Display Inputs is enabled, all enabled analog inputs aredisplayed in order, followed by the tachometer reading. The displayautomatically advances every 2 seconds. The display scroll can be stoppedon the current channel by pressing the LEFT key. The display can bemanually scrolled up or down in its given order by using the UP orDOWN keys. The display can be returned to automatic advance bypressing the RIGHT key.
6-31
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A

6-33
The embedded specifiers are of the form:@<optional digit><type letter><instance>.The optional digit allows the display width of the value to be specified;otherwise, the display width is a default value. The “type” letter can beeither upper or lower case. The instance number begins at ‘1.’ As anexample, to display the first B timer, use @t1. When combined with text,an entire message might look like B timer: @t1.
Embedded specifier type letters are:
C - Current counter count;E - Time elapsed on timer;F - Floating point variable;H - Runtime hours as floating point;I - Analog input value;M - Auto/manual percentage;S - Tachometer speed;T - Time remaining on timer;U - Analog input units text;V - Analog user output value;W - Word variable;Z - System Clock.
Functions ‘V’ and ‘I’ are a special case in which an upper case letterdisplays the value in fixed format, while a lower case letter displays thevalue in floating point format. For all other types, both upper and lowercase letters are treated the same.
DISPLAY MESSAGE -DM- (S)
Description: The Display Message coil allows the user to writemessages to the Hawk-I™’s display. In addition to text, the messages canhave embedded data specifiers to allow the display of such information asa tachometer reading or an analog input value. This is a backgroundfunction when no alarms are occurring. Any alarm will override theDISPLAY MESSAGE function.
6-32
Sequence Diagram Services:Coil
Class: N/A.
Alarm/Shutdown: N/A.
Parameters:1) Line - selects the display line for the message2) Offset - Selects the display offset from the left edge of the
display for the message for multiple messages on a line3) Display Text - Selects the text and data to be displayed.

DIVISION -DIV- (A)
6-35
Description: This analog function block divides one input value bythe other input value to obtain its output value. The operation isOUTPUT_VAL = INPUT_VAL_A / INPUT_VAL_B.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
DIVIDE BY CONSTANT -DVK- (A)
Description: This analog function block divides its input value by aspecified constant to produce an output value.The operation is OUTPUT_VAL = INPUT_VAL / CONSTANT.
6-34
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
After placing this object in theanalog diagram, double-clickon it to access its parameters.
Parameters:1) Floating point constant.

6-37
GREATER THAN -IGT- (S)
Description: The IGT function compares two registers to see whetherone specified register is greater than the other or alternatively greater than aconstant. A contact is provided to make the rung on the right of the IGTfunction healthy or non-healthy depending on the result. Registers may besigned word, unsigned word or floating point. Either register may be indexedto allow programmatic selection of an object instance.
If Left register > Right register then
TRUEELSE
FALSE
Sequence Diagram Services:Contact
Class: N/A
First select the variable type-Unsigned Word, Sign Word, or FloatingPoint. The user can then choose the relevant variable in the Combo-Box.
1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
Alarm/Shutdown: N/A
Parameters:
6-36
EQUALITY -IEQ- (S)
Description: The IEQ function takes two registers and is used tocompare two registers or a single register and a constant for equality. Acontact is provided to make the rung on the right of the IEQ functionhealthy or non-healthy depending on the result. Registers may be signedword, unsigned word or floating point. Either register may be indexed toallow programmatic selection of an object instance.
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description

GROUP AVERAGE -GA- (S) (A)
Description: The group average function creates an ongoingarithmetic operation that averages the outputs of a particular group ofsensors. A typical application is thermocouples that are attached to thecylinders of an engine. If the temperature of any one thermocoupledeviates from the overall average by more or less than a preset thresholdvalue, an alarm or shutdown function can be triggered.
6-39
First place the Group Average object in the analog diagram. Note thatthis object needs to be connected to another object. For instance anAnalog User Output.
Sequence Diagram Services:Deviation above ADeviation above ADeviation above BDeviation above B
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Deviation set points:
Lower AUpper ALower BUpper B
2) Select Inputs:Allows selection of inputs tobe included in the group.
6-38
GREATER/EQUAL -IGE- (S)
If Left register >= Right register then
TRUEELSE
FALSE
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Description: The IGE function compares two registers to seewhether one specified register is greater than or equal to the other oralternatively less than or equal to a constant. A contact is provided tomake the rung on the right of the IGE function healthy or non-healthydepending on the result. Registers may be signed word, unsigned wordor floating point. Either register may be indexed to allow programmaticselection of an object instance.
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description

6-41
INEQUALITY -INE- (S)
Description: The INE function takes two registers and is used tocompare two registers or a single register and a constant for inequality. Acontact is provided to make the rung on the right of the INE functionhealthy or non-healthy depending on the result. Registers may be signedword, unsigned word or floating point. Either register may be indexed toallow programmatic selection of an object instance.
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
By double-clicking on the object, you will access a screen which allowsyou to define two bands; a lower band - band A and an upper band -band B. Band A will be defined with a lower point and upper point, bandB will be defined the same way.HawkWin™ can then monitor if the average stays between those twobands.
6-40
Programers can then use the relevantcontacts in the Sequence Diagram.For instance in the screen on the left thecontact GADBH will be closed when thegroup average reaches the upper point ofband B.
Select the members of the groupby double-clicking Select Inputs.

JUMP TO SUBROUTINE -JS- (S)
6-43
Description: This object has two functions. The first one is tobranch from the main program to a subroutine. The second functionenables to come back from the subroutine to the main program.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
The subroutine will be visible through the tree-view on the left side ofthe screen.
Parameters: N/A
INVERSION -INV- (A)
Description: This analog block performs an inversion in its inputvalue to produce its output value.The operation is OUTPUT_VAL = 1 / INPUT_VAL.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-42

6-45
LESS/EQUAL -ILE- (S)
Description: The ILE function compares two registers to seewhether one specified register is less than or equal to the other oralternatively less or equal than a constant. A contact is provided to makethe rung on the right of the ILE function healthy or non-healthydepending on the result. Registers may be signed word, unsigned word orfloating point. Either register may be indexed to allow programmaticselection of an object instance.
If Left register =< Right register then
TRUEELSE
FALSE
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
6-44
LESS THAN -ILT- (S)
Description: The ILT function compares two registers to see whetherone specified register is less than the other or alternatively less than aconstant. A contact is provided to make the rung on the right of the ILTfunction healthy or non-healthy depending on the result. Registers may besigned word, unsigned word or floating point. Either register may be indexedto allow programmatic selection of an object instance.
If Left register < Right register then
TRUEELSE
FALSE
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description

6-47
LINKED SHIFT LEFT -SLL- (S)
Description: The SLL function is a single register function whichperforms a logical left shift on only WORD registers, this is useful whenworking with bit packed data and when performing certain arithmeticalfunctions. The most significant bit shifted out of the register is passed tothe link bit, which may be used by a succeeding SLL or SRL function. Ina similar manner the link bit from the last shift instruction is carried in tothe least significant bit of the register. The register may be in signed orunsigned word format and may be indexed to allow programmaticselection of an object instance. The register is updated to contain theresult of the operation.
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
Sequence Diagram Services:Coil
Class: N/A
LIMIT VALUE -LM- (A)
Description: The limit value block has an analog input that may beof any value, but the block’s output is restricted to a limited range that isset by the user.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
6-46
Parameters:1) Lower limit2) Upper limit.
Suppose that the input entering the limit value block ranges between -100 and 300 units, which could correspond to degrees Centigrade, force(tension vs. compression), etc.. Then the user sets the lower limit of theblock to 100 and the upper limit to 200. With inputs between 100 and200, the output of the block will equal the input. But if the input fallsbelow 100, the output of the block will stay at 100. Correspondingly, nomatter how high the input of the block becomes, the block output willnever rise above 200.

LOGICAL COIL/CONTACT -LC- (S)
Description: An logical coil or contact exists only inside the softwareof the Hawk-I™. It is used to store intermediate results in the SequenceDiagram. It has the same coil and contact services as a discrete coil orcontact, but it has no direct connection to any physical inputs or outputs.The Set and Reset coil function perform a latching operation. The outputgoes to the corresponding state when the coil becomes active, andremains in that state even when the coil becomes inactive, until theopposite coil is activated to force the output into the opposite state.
6-49
NOTE:These logical coils ARE NOT the MUDBUS logical coils. See SEQUENCEUSER OUTPUT.
Sequence Diagram Services:CoilSet CoilReset CoilContact.
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-48
LINKED SHIFT RIGHT -SRL- (S)
Description: The SRL function is a single register function whichperforms a logical left shift on only WORD registers, this is useful whenworking with bit packed data and when performing certain arithmeticalfunctions. The least significant bit shifted out of the register is passed tothe link bit, which may be used by a succeeding SLL or SRL function. Ina similar manner the link bit from the last shift instruction is carried in tothe most significant bit of the register. The register may be in signed orunsigned word format and may be indexed to allow programmaticselection of an object instance. The register is updated to contain theresult of the operation.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description

MINIMUM -MIN- (A)
Description: The minimum block has two inputs, A and B, and asingle output. The function of the block is to pass the lesser value of A orB to the output. The input with the larger value is ignored. If A < B, thenOutput =B. If A > B, then Output = B.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-51
MAXIMUM -MAX- (A)
Description: This block has two inputs, A and B, and a singleoutput. The function of the block is to transfer the larger of the twoinput values to the output. The smaller input is ignored. If A > B, thenOutput = A. If A < B, then Output = B.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-50

MULTIPLICATION -MUL- (A)
Description: This analog function block multiplies two input valuestogether to produce its output value.The operation is OUTPUT_VAL = INPUT_VAL_A * INPUT_VAL_B.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-53
MULTIPLEXER -MUX- (A)
Description: The multiplexer block has three analog inputs: A, B, andS. It has a single output. If the analog value present at S is 0 or negative, thenthe analog value at B will be passed to output B. If the analog value present atS is greater than 0, then the analog value at A will be passed to output B. If,for example, Input A= 50, Input B = 75, and S = 1, then the output of themultiplexer block will be 50. If Input A = 50, Input B = 75, and S = -1, thenthe output of the multiplexer block will be 75.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-52

6-55
NATURAL EXPONENT -EXN- (S)
Description: The EXN function takes a single floating point registerand calculates the natural exponent. The result is returned to this registerwhich must be a floating point value. The register may be indexed toallow programmatic selection of an object instance.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
MULTIPLY BY CONSTANT -MLK- (A)
Description: This analog function block multiplies the input valueby a specified constant to produce its output value.The operation is OUTPUT_VAL = INPUT_VAL * CONSTANT.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
6-54
Parameters:1) Floating point constant.

NEGATION -NEG- (A)
Description: This analog function block negates the input value toproduce its output value.The operation is OUTPUT_VAL = - INPUT_VAL.
6-57
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-56
NATURAL LOG -LN- (S)
Description: The LN function takes a single floating point registerand calculates the natural log. The result is returned to this register whichmust be a floating point value. The register may be indexed to allowprogrammatic selection of an object instance.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
NOTE:This function returns the natural logarithm-Napierian-of a floating point,NOT the decimal logarithm.

PID CONTROLLER -PID- (S) (A)
Description: The PID or Proportional-Integral-Derivative Control-ler can be used to control almost any industrial process that involves lagsand dead times. The inherent offset of the proportional control action iseliminated by the integral portion of the controller, and loop oscillation issuppressed through the derivative action. When properly tuned, a PIDcontroller will smoothly regulate the dynamic response of a complexprocess or system. A complete explanation of PID control and looptuning is beyond the scope of this manual.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Action (Direct, Reverse)2) Range (0-1, 0-100)3) Gain4) Deadband5) Integral6) Derivative7) Input filter.
6-59
A PID Controller coil forces thePID to track when active.Otherwise, the PID operatesnormally.
ONE SHOT -OS- (S)
Description: When the rung that the One Shot coil is placed onbecomes TRUE, then the corresponding contact will close for one scanthrough the Sequence Diagram. On the next scan, the contacts associatedwith the coil will once more become FALSE. The coil will not activateagain until the associated rung has gone FALSE and then TRUE again.
Sequence Diagram Services:CoilContact.
Class: N/A.
Alarm/Shutdown: N/A.
6-58
Parameters: N/A.

PRINT MESSAGE -PM- (S)
Description: The display message coil allows the user program towrite messages to the serial port. In addition to ASCII coded text, themessages can have embedded data specifiers to allow the display of suchitems as the value of the tachometer reading or an analog input value.The data is written when the coil goes from inactive to active, and thereis no handshaking or buffering. A carriage-return line feed is added at theend of the message.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
6-61
Parameters:1) Display Text - Selects the text and data to be displayed.
When the coil is INACTIVE the PID operates normally, driving it’soutput based on the values of it’s PV and SP inputs. When the coil goesACTIVE the PID output tracks it’s T input. Typically the PID coil andthe associated Auto/Manual coil will both be driven by a discrete inputwhich is connected to an AUTO/MANUAL switch. This will allow fullauto/manual operation with bumpless transfers.
6-60

6-63
RAISE TO POWER -XˆY- (S)
Description: The X^Y function takes two floating point registersand raises one to the power of the other. The result is returned to thisregister which must be a floating point value. The register may beindexed to allow programmatic selection of an object instance.Left Operator – xRight Operator – y
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
PWL TABLE -TBL- (A)
Description: The PWL function is useful to represent a nonlinearprocess. It allows Piece Width Linearization of a curve. The PWL Tablegraphs this curve.
6-62
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters:
This object will have any analog signal as input and can drive any analogoutput. User should enter starting point -First Input and ending point -Last Input, to define the scaling of the X-axis. HawkWin™ automati-cally divides the difference between Last Input and First Input in 16equal intervals. This will define the X-axis.The user should then enter the Y-value for each mark on the X-axis. Todo so select the relevant line on the table and then enter the Y-value inCurrent Output.
NOTE:The curve is automatically plotted as you enter the values in the table.

When the multiplexer switches because of a changing value at S, then therate of change of the output is limited by the value given in the PercentPer Second parameter box. User can enter one rate when switching fromB to A and a different rate when switching from A to B.
6-65
RAMPING MUX -RMP- (A)
Description: The Ramping Multiplexer block has three analoginputs called A, B, and S. There is a single output. If the analog valuethat is present at S is <0, then the analog value at B will be passed to theoutput. If the analog value at S is 0 or greater, then the analog value at Awill be passed to the output.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters:
6-64
1) Percent Per Second: Maximum slew rate when multiplexerswitches. Rate from A to B and B to A.
2) Instance: Occurrence of this function block.3) Descriptive Text: Documentation for function block.

RESET KEY -KRS- (S)
Description: The Hawk-I™ user will want to know the preciseconnection between the RESET key on the front of the controller andthe RESET function coil in the software. The user should keep in mindthat the reset function does not always work as one might expect,depending on the current status of the Hawk-I™ in terms of previouslyexisting alarms and shutdowns. In other words, if the RESET button ispressed in certain situations, nothing will happen. There are furthercomplications depending on whether the RESET function is pro-grammed to used the key on the Hawk-I™, or whether the RESETfunction is remotely triggered. It is beyond the scope of this manual toexplain the precise boundaries of the situations in which the RESET keyfunctions in a direct and transparent way. The user is therefore advised toavoid programming any internal RESET coils unless they are absolutelynecessary. The user is further advised to exhaustively test any and allHawk-I™ programming that utilizes the RESET function.
Sequence Diagram Services:ContactCoil
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-67
RATE LIMIT -RAT- (A)
Description: The Rate Limit block limits the slew rate of the outputto the value selected in the Amount Per Second parameter. The outputslew rate may be lower than the value selected, but it cannot be higher.The effect is to buffer the control system against excessively rapid changesin parameter values.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
6-66
Parameters:1) Amount Per Second.
Note that this value is dependent on the range of the input. Also notethat the system update rate for the Hawk-I™ is 100 ms. Therefore, ifand when the input value is changing, the value of the output will changeby only 1/10 of the rate per second setting during every 100 ms scan.
User can enter a rate for positive change - Rate UP - , and a rate fornegative change - Rate DN -.

SCALE VALUE -SC- (A)
Description: The Scale Value Block performs a y = mx + c calcula-tion. By varying the slope of the calibration equation, the Scale ValueBlock can match a given range of an analog input parameter to any scalethat the user selects. Once the Scale Value Block is programmed, the dataconversion is automatic. If, for example, the lowest analog value ofinterest was 0º C, and the highest value was 400º C, then the user couldset the block output to vary between 0 and 100. In this case, the blockoutput would be a percentage of full scale, or 400º C.
Sequence Diagram Services: N/A
Alarm/Shutdown: N/A
6-69
Parameters:1) Input point A2) Output point A3) Input point B4) Output point B
RUNTIME METER -RTM- (S) (A)
Description: The Runtime Meter can accumulate runtime inincrements of minutes and hours up to a limit of 65,535 hours. Theresolution is 1 minute. The Runtime Meter operates only when thesystem is running. While the system is running, the meter can be enabledand/or disabled at any stage of operation, depending on the program-ming of the rung that enables the meter. The user can define up to 12Runtime Meter objects.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-68

6-71
SEQUENCE MATH ADDITION -IAD- (S)
Description: The IAD function allows the user to perform additionon two registers or a register and a constant. The function takes tworegisters or register and a constant, which may be either an unsignedword, a signed word or a floating point. Either or both registers may beindexed to allow programmatic selection of an object instance. Either ofthe registers (providing it is not a constant) can be defined as thedestination, which is then updated to contain the resulting sum.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
6-70
SEQUENCE MATH COPY -ICP- (S)
Description: The ICP function is used to copy the contents of asource register to a destination. Source and destination registers may bedifferent or similar types (Unsigned word, Signed Word or Floatingpoint). The sequence math copy function may therefore be used totranslate between different numerical formats.
The source and destination type, field and instance are obtained fromthose functions which have instances in the application program (.hwk).
Parameters:1 Left Operator – Word format 9 Right Operator – Type2 Left Operator – Type 10 Right Operator – Field3 Left Operator – Field 11 Right Operator – Instance4 Left Operator – Instance 12 Right Operator – Indexed5 Left Operator – Indexed 13 Right Operator – Constant6 Left Operator – Constant 14 Right Operator – Type Description7 Left Operator – Type Description8 Right Operator – Word format
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A

6-73
SEQUENCE MATH MULTIPLICATION -IML- (S)
Description: The IML function allows the user to perform multipli-cation on two registers or a register and a constant. The function takestwo registers or register and a constant, which may be either an unsignedword, a signed word or a floating point. Either or both registers may beindexed to allow programmatic selection of an object instance. Either ofthe registers (providing it is not a constant) can be defined as thedestination, which is then updated to contain the resulting product.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:
1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
6-72
SEQUENCE MATH SUBTRACTION -ISB- (S)
Description: The ISB function allows the user to perform subtrac-tion on two registers or a register and a constant. The function takes tworegisters or register and a constant, which may be either an unsignedword, a signed word or a floating point. Either or both registers may beindexed to allow programmatic selection of an object instance. Either ofthe registers (providing it is not a constant) can be defined as thedestination, which is then updated to contain the resulting value. Eitherregister may be declared as the destination if a constant is not used.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description

6-75
SEQUENCE MATH MODULUS -MOD- (S)
Description: The MOD function allows the user to derive themodulus from an integer division on two registers or a register and aconstant. The function takes two registers or register and a constant,which must be an unsigned word. Either or both registers may beindexed to allow programmatic selection of an object instance. Either ofthe registers (providing it is not a constant) can be defined as thedestination, which is then updated to contain the result.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description
6-74
SEQUENCE MATH DIVISION -IDV- (S)
Description: The IDV function allows the user to perform divisionon two registers or a register and a constant. The function takes tworegisters or register and a constant, which may be either an unsignedword, a signed word or a floating point. Either or both registers may beindexed to allow programmatic selection of an object instance. Either ofthe registers (providing it is not a constant) can be defined as thedestination, which is then updated to contain the resulting division.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Word format 8 Right Operator – Type2 Left Operator – Type 9 Right Operator – Field3 Left Operator – Field 10 Right Operator – Instance4 Left Operator – Instance 11 Right Operator – Indexed5 Left Operator – Indexed 12 Right Operator – Constant6 Left Operator – Constant 13 Right Operator – Type Description7 Left Operator – Type Description

SEQUENCE USER INPUT -SUI- (S)
Description: This input allows the user to initiate Hawk-I™functions remotely through the Modbus connection. This SequenceDiagram contact reflects the corresponding Modbus coil status as set byModbus function 05 (Force Single Coil). This allows Sequence Diagramoperations to be controlled by Modbus commands.
Sequence Diagram Services:
6-77
Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
SEQUENCE TO ANALOG -SA- (S) (A)
Description: This function passes preset analog values to the analogdiagram. The connection is made through the Hawk-I™’s software. Theoutput of the Sequence to Analog coil will be discrete in nature (a coil orswitch will be either TRUE or FALSE). The state of the Sequence toAnalog coil will be controlled by the objects to its left in the ladder logicrung that it occupies.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
6-76
Parameters:1) Value - when coil is ACTIVE2) Value - when coil is INACTIVE

SETPOINT CONSTANT -SK- (A) (S)
Description: The setpoint constant is an analog diagram switch thatchanges state of a contact at a point that is programmed by the user. Ananalog input is compared to a selected constant value. This is a discretekind of TRUE-FALSE or FALSE-TRUE thresholding. The set points areset in the Sequence Diagram, but the setpoint constant function repre-sents an interconnection between the Sequence Diagram and the analogdiagram. The user-specified action determines if the contact closes whenthe input is above or below the setpoint. The user may also specify ahysteresis.
Sequence Diagram Services:Contact.
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Setpoint2) Hysteresis3) Action (Rising/Falling).
6-79
SEQUENCE USER OUTPUT -SUO- (S)
Description: This object corresponds to a Modbus logical coil. It canbe read via Modbus Function 01-Read Coil Status-. This allows SequenceDiagram results to be monitored remotely.
Sequence Diagram Services:Coil
6-78
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A

6-81
SHIFT LEFT -SL- (S)
Description: The SL function is a single register function whichperforms a logical left shift on a WD register, this is useful when workingwith bit packed data and when performing certain arithmetical functions.The most significant bit shifted out of the register is passed to the linkbit, which may be used by a succeeding SLL or SRL function. A logical 0is shifted into the least significant bit of the register. The register may bein signed or unsigned word format and may be indexed to allow pro-grammatic selection of an object instance. The register is updated tocontain the result of the operation.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
SETPOINT VARIABLE -SV- (A) (S)
Description: The setpoint variable is an analog diagram object thatis similar to the setpoint constant, except that in this case, the output ofthe switch depends on the difference between two analog values that areselected and programmed by the user.
Sequence Diagram Services:Contact.
Class: N/A
Alarm/Shutdown: N/A
6-80
Parameters:1) Hysteresis2) Action

6-83
SINE -SIN- (S)
Description: The SIN function takes a single floating point registerand calculates the sine. The result is returned to this register which mustbe a floating point value. The register may be indexed to allow program-matic selection of an object instance.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
6-82
SHIFT RIGHT -SR- (S)
Description: The SR function is a single register function whichperforms a logical right shift on a WD register, this is useful whenworking with bit packed data and when performing certain arithmeticalfunctions. The least significant bit shifted out of the register is passed tothe link bit which may be used by a succeeding SLL or SRL function. Alogical 0 is shifted into the most significant bit of the register. Theregister may be in signed or unsigned word format and may be indexed toallow programmatic selection of an object instance. The register isupdated to contain the result of the operation.
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description
Sequence Diagram Services:Coil
Class: N/A

SPLIT RANGE -SRC- (A)
Description: The Split Range function block is used in the analogdiagram. This block allows a single input that can have any given value tobe split into two outputs. These outputs are ranged from 0-1 or 0-100 todrive two outputs in a linear relationship.
6-85
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters:1) Output Range (0-1 or 0-100)2) Input point for A output (0)3) Input point for A output (maximum)4) Input point for B output (0)5) Input point for B output (maximum)
Suppose that the input range is 0 to 500. Output A: 0% = 0 input; 100%= 350 input. Output B: 0% - 200 input; 100% = 500 input. In this case,the output of a PID function block would be split into two outputs thatare scaled in a way appropriate to the process that must be controlled.
SPEED -SP- (S) (A)
WARNING: OVERSPEED is merely a contact. Unless combined into theSequence Diagram in an appropriate manner, it will not shut a machine
Class: N/A.
Alarm/Shutdown: N/A.
Sequence Diagram Services:SPUSP - underspeed contactSPOSP- overspeed contactSPPPS - purge permit speed contactSPCTS - crank termination speed contactSPCES - engine turning speed (>0) contact.
Parameters:
1) Pulses per revolution - how many sensor pulses equal 1 RPM2) Underspeed3) Overspeed4) Purge permit speed5) Crank termination speed.6) Pickup resolution.-
Description: The speed function is a switch that reflects the status ofthe tachometer or magnetic pickup value of output pulses per second ascompared to various user setpoints. In addition, the tachometer readingcan be accessed directly in the analog diagram.
6-84

Description: The Start Key is located on the front panel of theHawk-I™. Its function must be programmed before it will operate. Theresults of operating the Start Key will depend on its location in the ladderlogic diagram. The Start Key function can also be programmed to operatewhen a remote contact is cycled.
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
START KEY -KST- (S)
6-876-86
SQUARE ROOT -SQR- (S)
Description: The SQR function takes a single floating point registerand calculates the square root. The result is returned to this register. Theregister may be indexed to allow programmatic selection of an objectinstance.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:1 Type2 Field3 Instance4 Indexed5 Type Description

SUBTRACT CONSTANT - SBK- (A)
Description: This analog function block subtracts a user-set constantvalue from the input value.The operation is OUTPUT_VAL = INPUT_VAL - CONSTANT.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
6-89
Parameters:1) Floating point constant
Description: The Stop Key is located on the front panel of theHawk-I™. The user must program its function before it will operate.The results of pressing the Stop Key will depend on how it was pro-grammed into the Sequence Diagram. The Stop Key function can beassigned to a remote switch.
STOP KEY -KSP- (S)
Sequence Diagram Services:Contact
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
WARNING: The Stop Key has no predefined function. The program-mer must ensure that a correct sequence of events when this key is
6-88

SYSTEM FUNCTIONS -SYS- (S)
Description: This coil enables three System Functions, Print Log- to print the log of events to the serial port -, Exit Test Mode - XTM,Disable View Mode - DVM.
6-91
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
SUBTRACTION -SUB- (A)
Description: This analog function block subtracts one inputvalue from the other input value. The operation is OUTPUT_VAL =INPUT_VAL_A - INPUT_VAL_B.
Sequence Diagram Services: N/A
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-90

TIMER -TM- (S)
Description: The range of the timer is 1 second to 32,000 seconds. Atimer allows time intervals to be included in the Sequence Diagram. A timermay be started and stopped by its ON coil, and its condition may be read bytwo contacts, RUNNING and DONE. The actions of this coil and thesecontacts depend on the timer mode that is selected by the user.
6-93
If the timer is configured as an ON timer,the timer will begin timing down from itspreset value toward zero when the ON coilis activated. While the ON coil is activeand before the timer expires, the RUN-NING contact will be TRUE. When thecounter expires, the RUNNING contactwill go FALSE and the DONE contact willgo TRUE for as long as the ON coilremains active. When the ON coil goesinactive, the timer resets. When the ONcoil goes active again, the timer will oncemore begin timing down from its presetvalue.
If the timer is configured as a T-OFF timer, itwill begin to time down when the ON coilgoes inactive. The RUNNING contact isTRUE while the timer is counting. The DONE contact is TRUE eitherwhen the ON coil is active, or when the timer is counting. The DONEcontact may thus be used as a one-shot output with a length equal to thetimer’s preset value.
Sequence Diagram Services:ON coilRUNNING contactDONE contact.
Class: N/A.
Alarm/Shutdown: N/A.
6-92
TANGENT -TAN- (S)
Description: The TAN function takes a single floating point registerand calculates the tangent. The result is returned to this register whichmust be a floating point value. The register may be indexed to allowprogrammatic selection of an object instance.
Sequence Diagram Services:Coil
Class: N/A
Alarm/Shutdown: N/A
Parameters:
1 Type2 Field3 Instance4 Indexed5 Type Description

TOGGLE -TG- (S)
Description: The Toggle Coil toggles, or discretely changes its statefrom TRUE to FALSE or from FALSE to TRUE, on the rising edge of aninput. The Reset Coil forces the Toggle Coil state to FALSE no matterwhat its present state may be. The Set Coil forces the Toggle Coil state toTRUE without regard to its present state.
Sequence Diagram Services:Toggle coilSet coilReset coilContact
Class: N/A
Alarm/Shutdown: N/A
Parameters: N/A
6-956-94
Parameters:1)Timer preset - the value in seconds which the timer “times2)Timer type - T-ON or T-OFF3)Resolution 1sec or 100mS4)Timer minimum - the minimum timer preset which can be
entered from the front panel5)Timer maximum - the maximum timer preset which can be
entered from the front panel
Note that the current time value and elapsed time value may be displayedin a user message (see User Message Coil description). The current timevalue may also be accessed via Modbus.

USER ALARM/SHUTDOWN -AS- (S)
Description: The User Alarm/Shutdown Coil allows the user todefine any logical event as an alarm or a shutdown. This is an extensionof the built-in ability of the Hawk-I™ to generate an alarm or a shut-down based on the value of an analog or discrete input.
Sequence Diagram Services:Coil
Class: Assignable
Alarm/Shutdown: Assignable
Parameters:1)Class- A, B, b, C, or none2)Action - Alarm or Shutdown (valid if Class is A, B, b, or C).
6-96

7-2
The function code field of a message frame contains eight bits (RTU).Valid codes are in the range of 1 ... 255 decimal. When a message is sentfrom a master to a slave device the function code field tells the slave whatkind of action to perform. Examples are: read the ON / OFF states ofdiscrete Inputs, read the data contents of registers, read the diagnosticstatus of the slave, write to coils or registers, or to allow loading, record-ing, or verifying the program within the slave.
When the slave responds to the master, it uses the function code field toindicate either a normal (error-free) response or that some kind of erroroccurred (called an exception response).
The data field of messages sent from a master to a slave devicecontains information which the slave must use to take the actiondefined by the function code. This can include items like discrete andregister addresses, the quantity of items to be handled, and the countof actual data bytes in the field.
If no error occurs, the data field of a response from a slave to a mastercontains the data requested. If an error occurs, the checksum containsan exception code that the master application can use to determinethe next action to be taken.
For more information on Modbus protocol, refer to:
http://www.modicon.com/techpubs/toc7.html
7.1. Introducing Modbus Protocol
7. COMMUNICATIONS
7-1
7.1.1. GeneralMODBUS® Protocol is a messaging structure, widely used to establishmaster-slave communication between intelligent devices.
This protocol defines a message structure that controllers will recognizeand use, regardless of the type of networks over which they communicate.It describes the process a controller uses to request access to anotherdevice, how it will respond to requests from the other devices, and howerrors will be detected and reported. It establishes a common format forthe layout and contents of message fields.
7.1.2. CodingA MODBUS message sent from a master to a slave contains the addressof the slave, the “command” (e.g. “read register” or “write register”), thedata, and a check sum (LRC or CRC).
The basic structure of a MODBUS frame is then: address, function, dataand checksum.
Each message is expressed by using several consecutives bytes. TheMODBUS protocol comes in 2 modes:
1) ASCII transmission mode: Each eight-bit byte in a message is sent as 2ASCII characters.2) RTU transmission mode: Each eight-bit byte in a message is sent as 2four-bit hexadecimal characters.
The Hawk-I uses the RTU mode. The main advantage of this mode isthat its greater character density allows better data throughput thanASCII for the same baud rate.
In RTU mode, the address field of a message frame contains eightbits. Valid slave device addresses are in the range of 1 ... 255. Amaster addresses a slave by placing the slave address in the addressfield of the message. When the slave sends its response, it places itsown address in this address field of the response to let the masterknow which slave is responding.

7-4
7.2.3. Accessing dataOnce the communications parameters between master and slave have beenconfigured, it is then possible to send/receive messages.Reminder: a Modbus message contains: address, command, data and checksum.Each slave is identified to the master by its address.The “command” (e.g. “read register” or “write register”) is often implicitlytaken care of by the SCADA system being used.
Data is stored in the Hawk-I memory at locations called registers. Eachregister has a specific address (do not confuse with unit address) andcontains specific type of information. Registers can contain logical valuesor numeric values expressed as integers of floating point variables.
AMOT supplies two tables containing a list of Hawk-I registers.
This table contains registers that can only be read -using function code03-. This is the table used to generate the Quick Block view in Hawkwin.Each register is defined with its address, description and contents.
7.2.4. Hawk-I Quick Block Registers
Register Description Contents
40001 System Error Status = 0 if no Error
40002 Common Alarm First out Alarm (source and Type Number)
40003 Common Shutdown First out Shutdown (source and Type Number)
40004 Tachometer 1 Tach1 (RPM)
40006 Digital Inputs 1-16 Packed Digital Input Status 0=open 1=closed
40008 Relay Output Status 1-12 Packed Relay Output Status 0=open 1=closed
40010 MODBUS Packed Logical Coils 1-16
40018 Thermocouple Analog Input 1 IEEE Floating Point (2 registers)
40050 4-20mA Analog Input 17 IEEE Floating Point (2 registers)
40066 4-20mA Analog Output 1 (percent) IEEE Floating Point (2 registers)
40068 4-20mA Analog Output 2 (percent) “ “ “ “
40070 Analog User Output Register 1 IEEE Floating Point (2 registers)
Note: This is only a portion of the table.
7-3
7.2 Establishing Communications
7.2.1. Networking unitsSince Modbus protocol is just a messaging structure, it is independent ofthe underlying physical layer. It is traditionally implemented using serialcommunications, RS232, RS422, or RS485 over a variety of media (e.g.fiber, radio, cellular, etc.). It can also be use with Ethernet –ModbusTCP/IP-.Hawk-I controllers use an RS-232C compatible serial interface thatdefines connector pinouts, cabling, signal levels, transmission baud rates,and parity checking. Hawk-I’s can be networked directly or via modems.On a Modbus network, controllers communicate using a master-slavetechnique, in which only one device (the master) can initiate transactions(queries). The other devices (the slaves) respond by supplying therequested data to the master, or by taking the action requested in thequery. Typical master devices include other logic controllers or PCs .The master can address individual slaves, or can initiate a broadcastmessage to all slaves. Slaves return a message (response) to queries that areaddressed to them individually. Responses are not returned to broadcastqueries from the master.Hawk-I model 8630B and 8632A operate only as slaves.
7.2.2. Configuring parametersAt the master level, users select the desired mode -Modbus Serial-, alongwith the serial port communication parameters (port number, baud rate,parity mode: none, data bits: 8, stop bits:1, polling rate ). The mode andserial parameters must be the same for all devices on a Modbus network.
At the Hawk-I level, users should select:
• Unit Address -from 1 to 255-• Baud Rate -must match the master-• Address +1 -yes or no-: this feature adds 1 to every incoming message
address (some communications software subtract 1 from theMODBUS address before transmitting the request)
• Request To Send -lo or hi-: this feature defines the request bit as a lowor high (most systems use low)
These parameters can be accessed in Configuration Mode from theCommunications menu. See the Configuration Mode flow chart in theHawk-I Hardware Manual.

7-6
Use:Get information on source and type of the last alarms and shutdownsgenerated by the Hawk-I
Query:Last COMMON ALARM is stored in register 40002, last COMMONSHUTDOWN is in register 40003.
Response:Each register has 2 bytes. The lowest 8 bits represent the instance numberor source/channel number. For example, if the value in the first 8 bits is1, then it represents the first instance of either a Digital Input, AnalogInput, or User Alarm/Shutdown. A value of 24 would represent the 24th
instance, and so on.
The second byte, which is the 8 highest bits, represents the type of alarm/shutdown. There are 3 possibilities:
A value of 1 (00000001 in binary) represents a Digital InputA value of 4 (00000100 in binary) represents an Analog InputA value of 19(00010011 in binary) represents a User Alarm/Shutdown
Example:If register 40002 contained 00000100 00000011, then there is an alarmon Analog Input 3
7.3. Most common requests
7.3.1. Reading alarm/shutdowns
Note:If the SCADA package interprets the register as a numerical value, then: - an alarm generated by a digital input will have the value 256 (1 insecond byte) plus instance number. For example, a reading of 257represents alarm in DI1. - an alarm generated by an analog input will have a numerical value of1024 (4 in second byte) + numeric value of instance- an alarm generated by a User alarm object will have a value of 4864 (19in second byte) + instance number.
7-5
This table is organized in several sheets.The Main Sheet summarizes all accessible data, per type, such as DigitalInputs, Digital Outputs, Tachometers, Timers, Counters, Analog Inputs,Analog Outputs, and so on.The Hawk-I memory is organized in blocks of 100 registers, each blockcontaining only one type of object. The table describes the way thoseblocks are used.The first column indicates type of object, the second column indicatesthe starting address for this type of object, the third column indicates themaximum number of instances of this particular object that can becreated in Hawkwin, the fourth column is the length (number ofregisters) needed to store this type of data, the fifth column indicates thenumber of addresses reserved for this particular type of object in sets of100. Each block contains 100 registers, the sixth column indicates thenumber of memory blocks needed to store this data.
7.2.5. Memory map of all MODBUS registers
Parameter Object Type Base Max. Num Length Hundreds Block Size
Sample:
Digital Inputs 1000 64 256 300 3
In the sample above, the digital inputs are stored in registers starting ataddress 1000. The maximum number of digital inputs allowed inHawkwin is 64.
Each digital input needs 4 registers to be fully described (This informa-tion is available on the digital inputs sheet):
• Register # 1: Class Type• Register # 2: Alarm Type• Register # 3: Contact Type• Register # 4: reserved for future used
The total number of registers needed is 64 x 4 =256.
A block is a set of 100 addresses and can contain only one type of object,therefore 3 blocks are needed to cover those 256 addresses.
After the Main Sheet, each additional sheet covers in detail a particulartype of data:Digital Inputs, Digital Outputs and so on.
The following pages cover the most common data requests, their use,how the query is expressed, and how the slave responds

Response:Some masters directly interpret the register as two bytes for two ASCIIcharacters. However, if the system brings back a numerical value, it is thennecessary to convert it into an ASCII value prior to interpreting it. Forinstance if address 220 as a numeric value of 16725, expressed as 0100000101010101 in binary, then the first character will have the ASCII value of 65(decimal value of 01000001), which represents “A”, the second will have thevalue 85 (decimal value of 01010101), which is “U”.
Address 220 221 222 223 224 225 226 227
Numeric value 16725
Display reading AU
7-8
Use:Display or log onto master unit any value acquired by Hawk-I sensors.
Query:Use Quick Block. Each Analog input, as a floating point value, is storedin two consecutive registers or four bytes. It is necessary to indicate to themaster that the requested value is a floating point and then point to thefirst register. The master will automatically poll both registers.
For instance, to access Analog Input 17, call for F40050. F indicatesfloating point.
Response:Brings back the numeric value of analog input 17 as a floating point.
7.3.5. Reading Analog Inputs
Note:IEEE floating points orders: (often refered as the big endian vs littleendian issue)Given a 32 bits floating point number of 4 bytes, F1 F2 F3 F4:
- 8630 returns in first register: F1 F2; in second register: F3 F4 (hibyte, lo byte order)- 8632 returns in first register: F3 F4; in second register: F1 F2 (hibyte, lo byte order)
It may be necessary to select the relevant method at the master level.Most master/SCADA packages offer the option of changing theModbus 32 bit floating point order.
7-7
Use:Reads the ON / OFF status of discrete inputs in the slave. Broadcast isnot supported.
Query:The states of the 32 digital inputs in Hawk-I are stored in two registers,40006 and 40007 (using the Quick Block table). The status of each input ispacked as one input per bit of the registers. The query message singles out one bit inside a register. Inputs are addressedstarting at 0 for bit 1, and 15 for bit 16 (inputs 1 ... 16 are addressed as 0 ...15). To request the state of digital input 1, call register 40006.0.
Response:Status is indicated as: 1 = ON; 0 = OFF.
7.3.2. Reading Input Status
Use:Reads the ON / OFF status of discrete outputs in the slave. Broadcast isnot supported.
Query:The state of Hawk-I’s 12 relay outputs are packed as one coil or relay perbit in register 40008 (using the Quick Block table). The query messagespecifies the bit to read . Coils are addressed starting at one (coils 1 ... 12are addressed as 1 ... 12). To access state of relay 8, call address 40008.8.
Response:Status is indicated as: 1 = ON; 0 = OFF.
7.3.3. Reading Coil Status
Use:Display on the master unit the 2 lines x 16 characters of the Hawk-I.
Query:Use Modbus table of registersLine 1 is stored starting at address 220 to 228 with 2 characters perregister (or one character per byte). Each byte contains the value inASCII of the character. Line 2 is stored starting at address 230 to 238.
7.3.4. Reading the display

7-10
Sample:
Analog User Input Base 4400Element Size: 9Input # Register Size Offset 1 Float value 2 0 1 Force value 2 2 1 Minimum value 2 4 1 Maximum value 2 6 1 Spare 1 8
To write to AUI1, use address F44400.
Response:Write a numeric value from the master to the float value of AUI1 in theHawk-I.
Use:Directly write to a setpoint from a remote PC
Query:Use MODBUS table addresses, adding a 4 and F. For instance to write to SK1:
7.3.8. Writing to Setpoints
Setpoint (Constant) Base 7900Element Size: 5
Input # Register Size Offset Address
1 Setpoint 2 0 7900
1 Hysteresis 2 2 7902
(0=Rising,
1 Direction 1 4 7904 1=Falling)
Use F47900
Response:Write to SK1 value entered at PC level.
7-9
Use:Forces a single coil to either ON or OFF. When broadcast, the functionforces the same coil reference in all attached slaves.In the Hawkwin ladder, this writes to Sequence User Input or any of theHawk-I keys. This type of input allows the user to initiate Hawk-Ifunctions remotely. The sequence diagram contact reflects the corre-sponding Modbus coil status.
7.3.6. Forcing Coils
Query:The query message specifies the coil reference to be forced. Coils areaddressed starting at zero (coil 1 is addressed as 0).All panel keys can be activated by writing directly to their respective registers:(100=STOP, 101=START, 102=DOWN, 103=RIGHT,104=ENTER,105=UP, 106=LEFT, 107=RESET)
Use:Pass an analog value to the Hawk-I from a remote master. This can beused to pass a value for recipes for instance.
7.3.7. Writing to Analog User inputs
Query:Use MODBUS table of registers. Depending on the system used, itmight be necessary to add a 4 (to enable the Modbus write function) infront of the address as well as an F for floating point.
Object Type Base Max. Num Length
MODBUS Coils 0 99 100 Storage for Sequence User InputsSUI1: register 0, SUI2: register 1 …
Stop key: register 100, ….
Keys 100 8 100
Note:The forced state will remain valid until the Hawk-I’s logic changes thestate of the coil. The coil will remain unchanged if it is not programmedin the controller’s logic.