Embed Size (px)
Citation preview

Harvard University P.F.J. Lermusiaux
Deterministic and stochastic modeling of
the end-to-end interdisciplinary system,
and its errors and uncertainties
P.F.J. LermusiauxApril 9, 2003
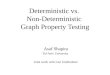
1. END-TO-END SYSTEMS AND COUPLED MODELS
2. UNCERTAINTIES IN END-TO-END COMPONENTS
– SOURCES, FORWARD TRANSFERS, BACKWARD TRANSFERS
3. RESEARCH SUBJECTS FOR END-2-END UNCERTAINTY MODELING
– TOPICS AND DIRECTIONS
– ILLUSTRATIVE QUESTIONS AND CHALLENGES
Harvard University P.F.J. Lermusiaux
AD: Acoustical DataMD: Meteorological DataPD: Physical DataGD: Geological DataND: Noise DataSD: Sonar Data
PMD: Physical Model DataBMD: Bottom Model DataNMD: Noise Model DataAPMD: Acous. Prop. Model DataSMD: Sonar Model DataTMD: Target Model Data
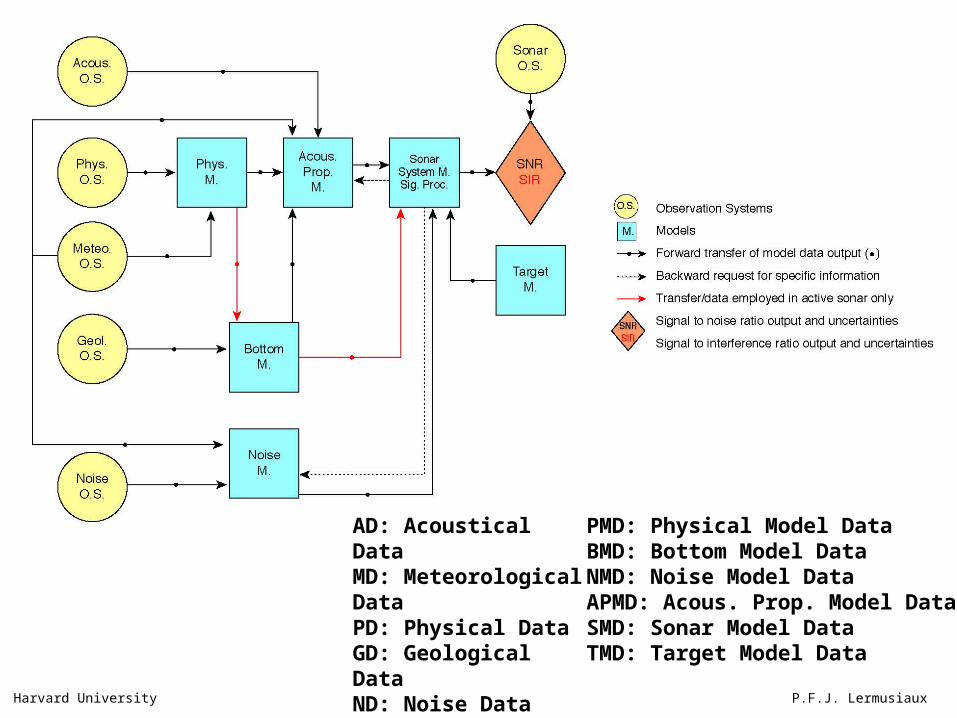
Coupled (Dynamical) Models and OutputsBOTTOM MODELS•Hamilton model, Sediment flux models (G&G), etc•Statistical/stochastic models fit-to-data
OUTPUTS•Wave-speed, density and attenuation coefficients
NOISE MODELS•Wenz diagram, empirical models/rule of thumbs
OUTPUTS•f-dependent ambient noise (f,x,y,z,t): due to sea-surface, shipping, biologics
SONAR SYS. MODELS AND SIGNAL PROCES.•Sonar equations (f,t)•Detection, localization, classification and tracking models and their inversions
OUTPUTS•SNR, SIR, SE, FOM•Beamforming, spectral analyses outputs (time/frequency domains)
TARGET MODELS•Measured/Empirical
OUTPUTS: SL, TS for active
PHYSICAL MODELS•Non-hydrostatic models (PDE, x,y,z,t)•Primitive-Eqn. models (PDE, x,y,z,t)•Quasi-geostrophic models, shallow-water•Objective maps, balance eqn. (thermal-wind)•Feature models
OUTPUTS•T, S , velocity fields and parameters, C field •Dynamical balances
ACOUS. PROP. MODELS•Parabolic-Eqn. models (x,y,z,t/f) •(Coupled)-Normal-Mode parabolic-eqn. (x,z,f)•Wave number eqn. models (x,z,f: OASIS) •Ray-tracing models (CASS)
OUTPUTS•Full-field TL (pressure p, phase ) •Modal decomposition of p field •Processed series: arrival strut., travel times, etc.•CW / Broadband TL
REVERBERATION MODELS (active)•Surface, volume and bottom scattering models
OUTPUTS: scattering strengths
Harvard University P.F.J. Lermusiaux
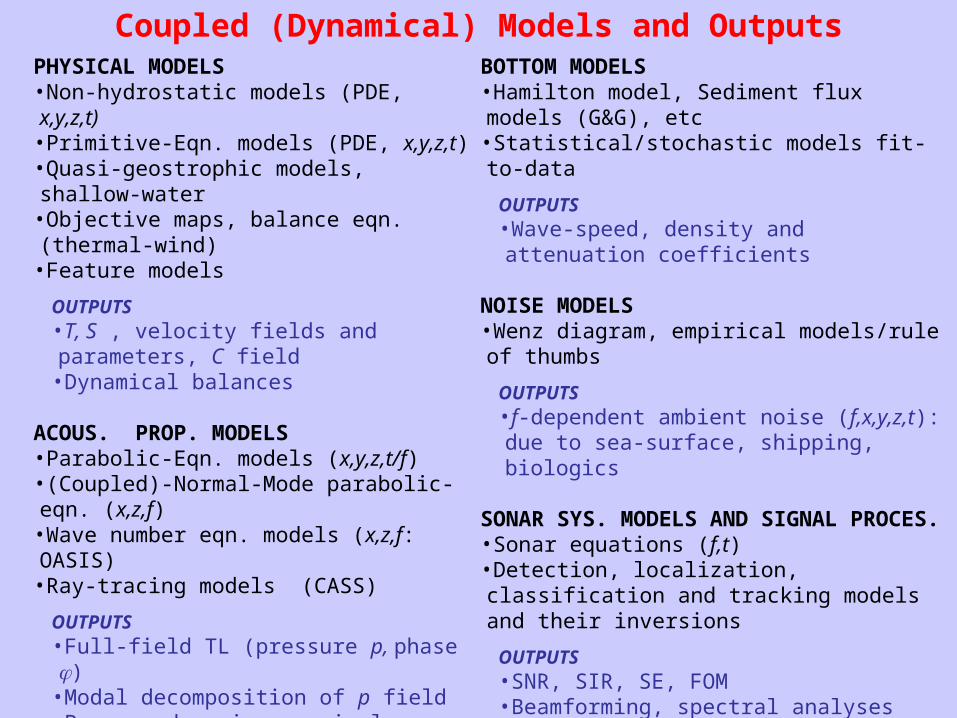
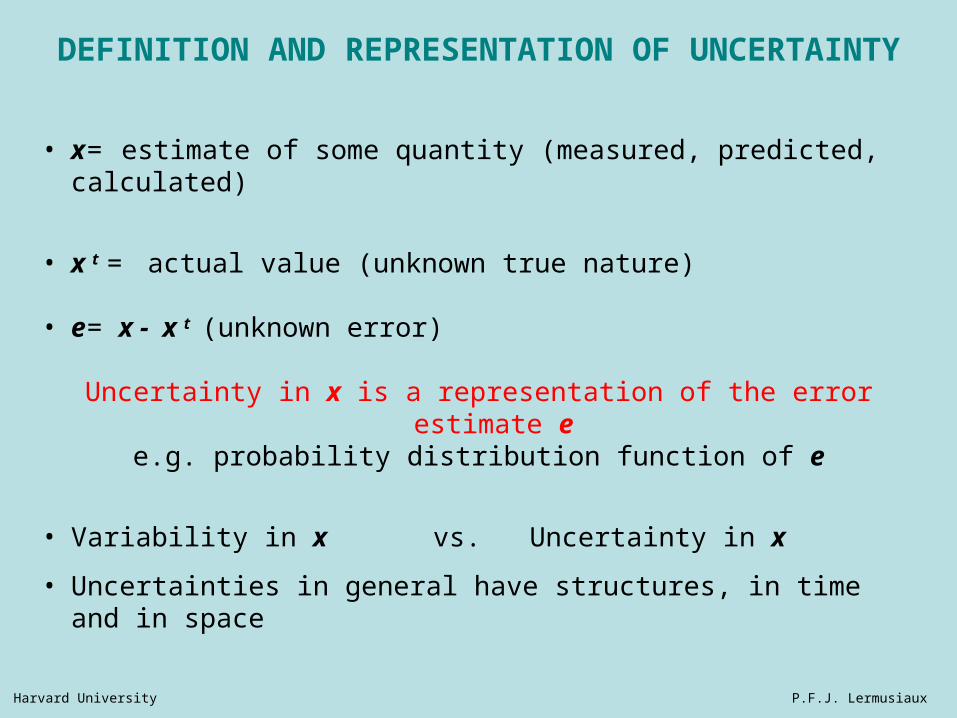
DEFINITION AND REPRESENTATION OF UNCERTAINTY
• x= estimate of some quantity (measured, predicted, calculated)
• x t = actual value (unknown true nature)
• e = x - x t (unknown error)
Uncertainty in x is a representation of the error estimate ee.g. probability distribution function of e
• Variability in x vs. Uncertainty in x
• Uncertainties in general have structures, in time and in space
Harvard University P.F.J. Lermusiaux
MAIN SOURCES OF UNCERTAINTIES INEND-TO-END COMPONENTS
• Physical model uncertainties
– Bathymetry
– Initial conditions
– BCs: surface atmospheric, coastal-estuary and open-boundary fluxes
– Parameterized processes: sub-grid-scales, turbulence closures, un-resolved processes
• e.g. tides and internal tides, internal waves and solitons, microstructure and turbulence
– Numerical errors: steep topographies/pressure gradient, non-convergence
• Bottom/geoacoustic model uncertainties
– Model structures themselves: parameterizations, variability vs. uncertainty
– Measured or empirically-fit model parameters
– BCs (bathymetry, bottom roughness) and initial conditions (for flux models)
– 3-D effects, non-linearities
– Numerical errors: e.g. geological layer discretizations, interpolations
Harvard University P.F.J. Lermusiaux
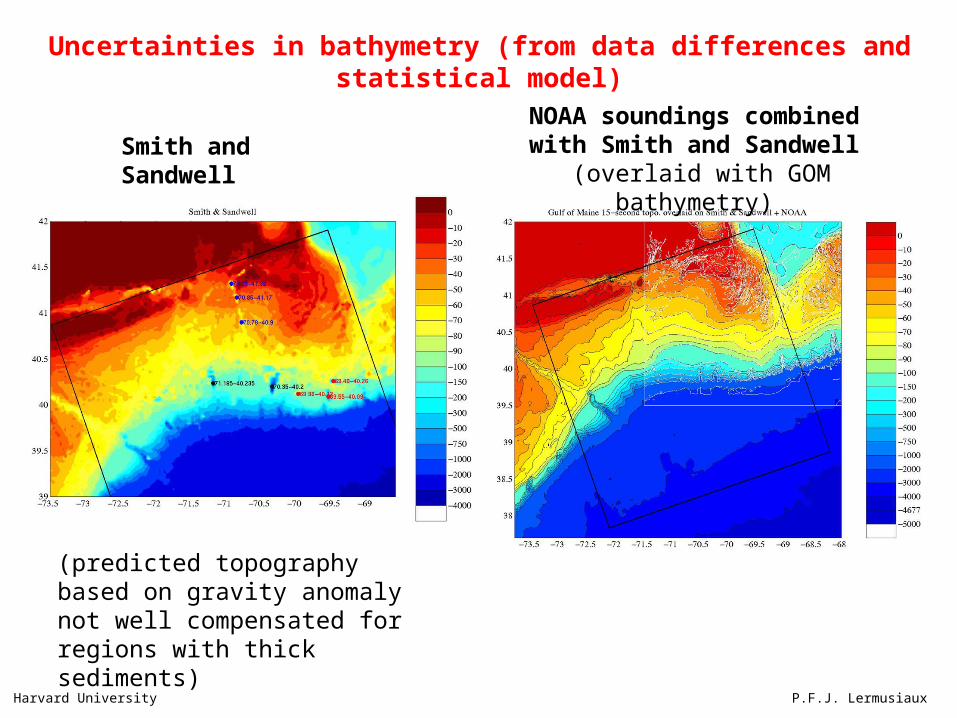
Smith and SandwellNOAA soundings combined with
Smith and Sandwell (overlaid with GOM bathymetry)
(predicted topography based on gravity anomaly not well compensated for regions with thick sediments)
Uncertainties in bathymetry (from data differences and statistical model)
Harvard University P.F.J. Lermusiaux
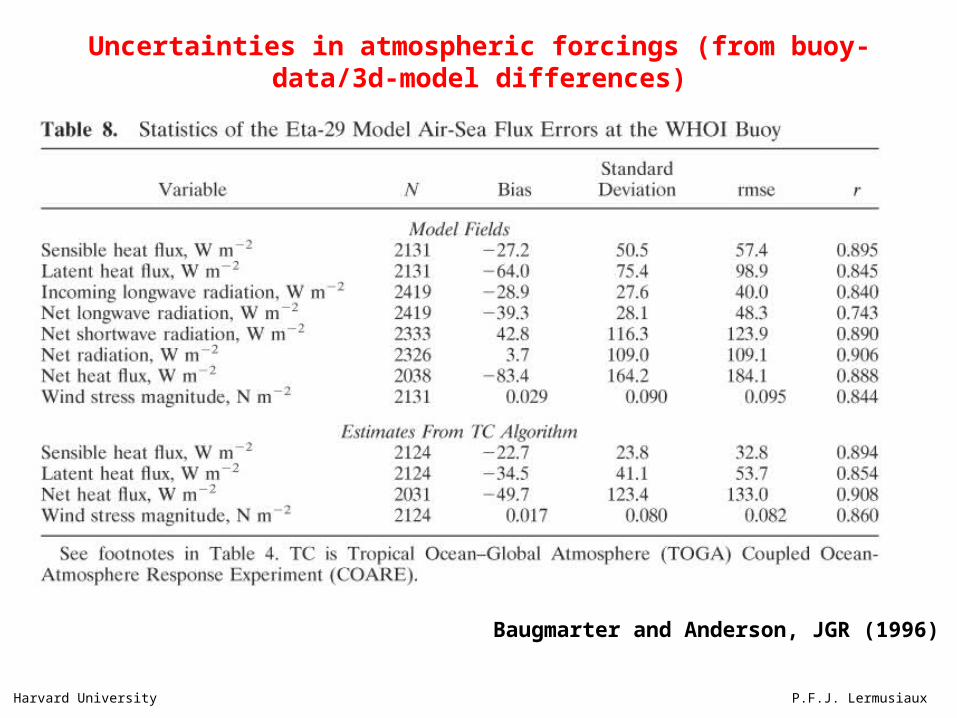
Baugmarter and Anderson, JGR (1996)
Uncertainties in atmospheric forcings (from buoy-data/3d-model differences)
Harvard University P.F.J. Lermusiaux
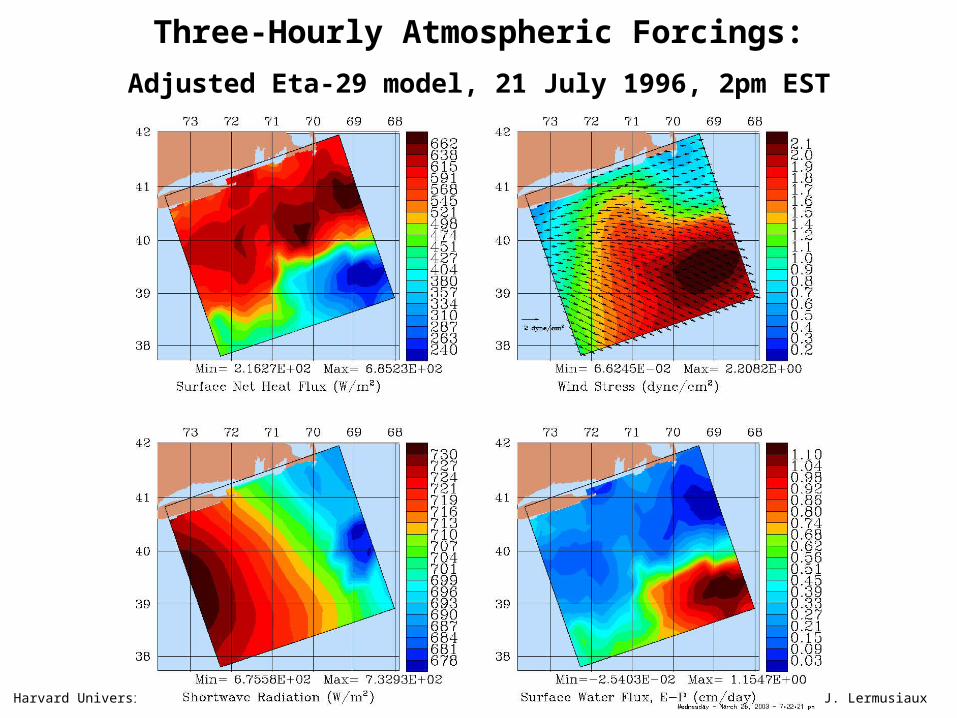
Three-Hourly Atmospheric Forcings:
Adjusted Eta-29 model, 21 July 1996, 2pm EST
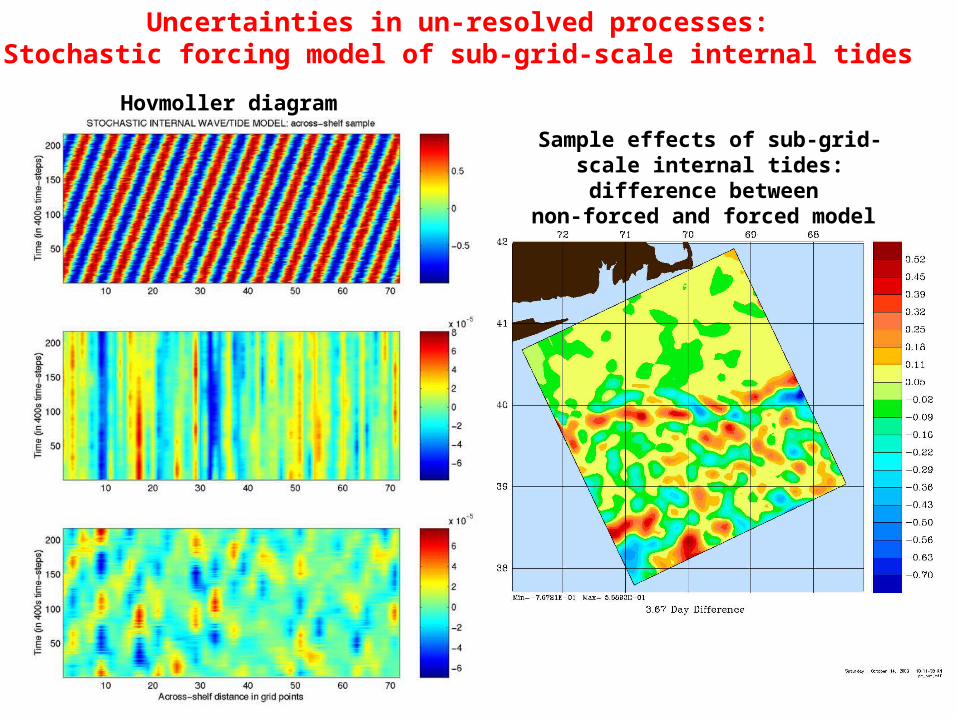
Hovmoller diagram
Sample effects of sub-grid-scale internal tides: difference between
non-forced and forced model
Uncertainties in un-resolved processes: Stochastic forcing model of sub-grid-scale internal tides
Harvard University P.F.J. Lermusiaux
MAIN SOURCES OF UNCERTAINTIES INEND-TO-END COMPONENTS (Continued)
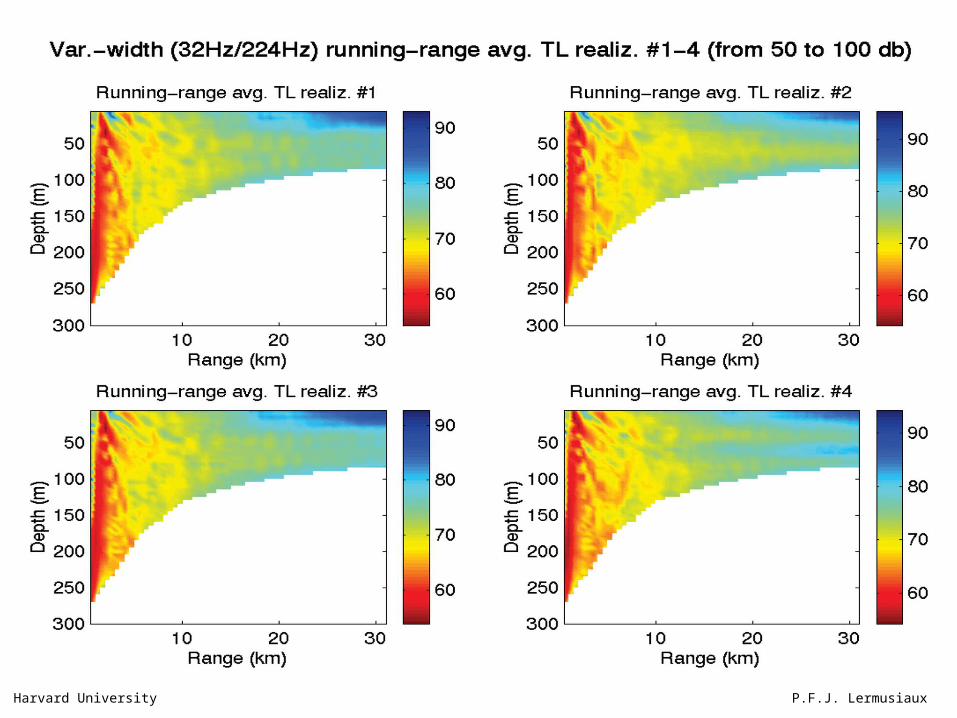
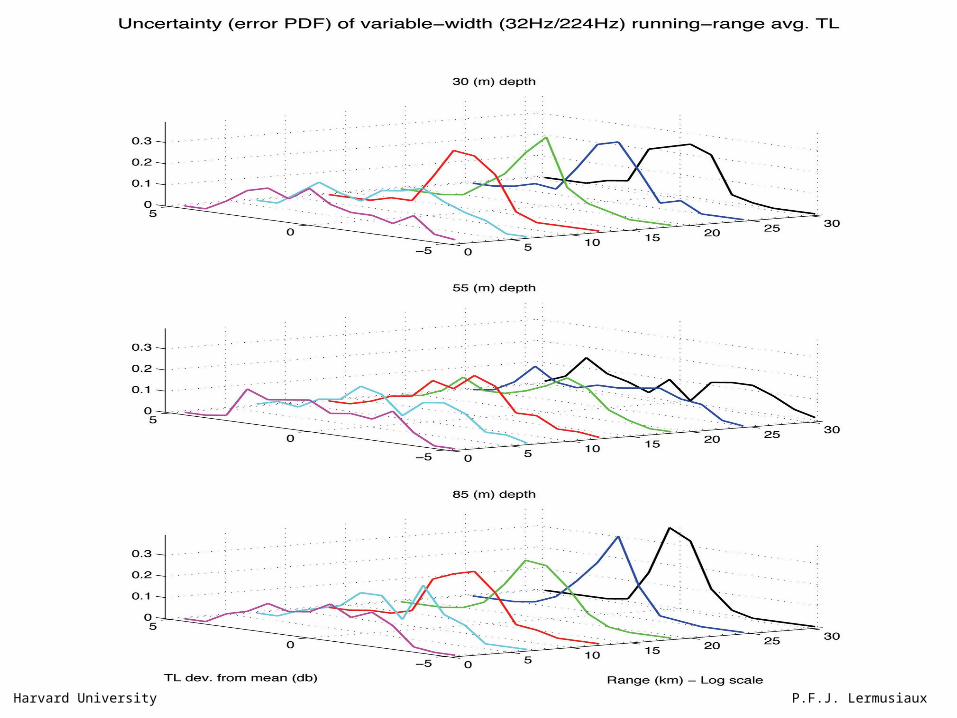
• Acoustical model uncertainties
– Sound-speed field (c)
– Bathymetry, bottom geoacoustic attributes
– BCs: Bottom roughness, sea-surface state
– Scattering (volume, bottom, surface)
– 3-D effects, non-linear wave effects (non-Helmholz)
– Numerical errors: e.g. c-interpolation, normal-mode at short range
– Computation of broadband TL

Harvard University P.F.J. Lermusiaux
Harvard University P.F.J. Lermusiaux
Harvard University P.F.J. Lermusiaux
MAIN SOURCES OF UNCERTAINTIES INEND-TO-END COMPONENTS (Continued)
• Sonar system model and signal processing uncertainties
– Terms in equation: SL, TL, N, AG, DT
– Sonar equations themselves: 3D effects, non-independences, multiplicative noise
– Beamformer posterior uncertainties, Beamformer equations themselves
• Noise model uncertainties
– Ambiant noise: frequencies, directions, amplitudes, types (manmade, natural)
– Measured or empirically-fit model parameters (Wenz, 1962)
• Target model uncertainties
– Source level, target strength (measured or empirically-fit model parameters)
• Reverberation model uncertainties (active)
– Scattering models themselves: parameterizations (bottom scattering, bubbles, etc)
– Measured or empirically-fit model parameters
Harvard University P.F.J. Lermusiaux
Harvard University P.F.J. Lermusiaux
METHOLOGIES FOR UNCERTAINTY MODELING•Representations
– Random numbers
– Statistical moments
– Bayesian, Bayesian hierarchical, Maximum entropy methods (Erickson and Smith,1988)
– Error subspace (EOFs, Polynomial Chaos, ESSE, etc)
– Fuzzy uncertainties (Klir and Wierman, 1999)
– Belief functions (Dempster, 1990)
•Evolutions/propagations/forward transfers
– Deterministic/Stochastic calculus (e.g. Jazwinski, 1970)
– Statistics (pdf convolutions, etc)
– Information theory (Cover, 1991)
– Deterministic differentials (outputs wrt inputs)
•Inversion methods/backward transfers
– Adjoint methods, Generalized inverse, Smoothing methods (KS, ESSE)
Harvard University P.F.J. Lermusiaux
RESEARCH SUBJECTS FOR END-2-END UNCERTAINTY MODELING
Table provided for each subject:• List of research topics and directions (left column)• Series of illustrative research questions and challenges (right
column, not intended to be comprehensive)
Current and anticipated research organized in major subjects:
• Modeling Approaches and Methodologies• End-to-End Scales and Nonlinearities• Error Estimation, Error Models and Error Reductions• Sensitivities, Prioritizations and Idealized Uncertainty Modeling• Uncertainty Complex Systems and Fleet Operations
Harvard University P.F.J. Lermusiaux
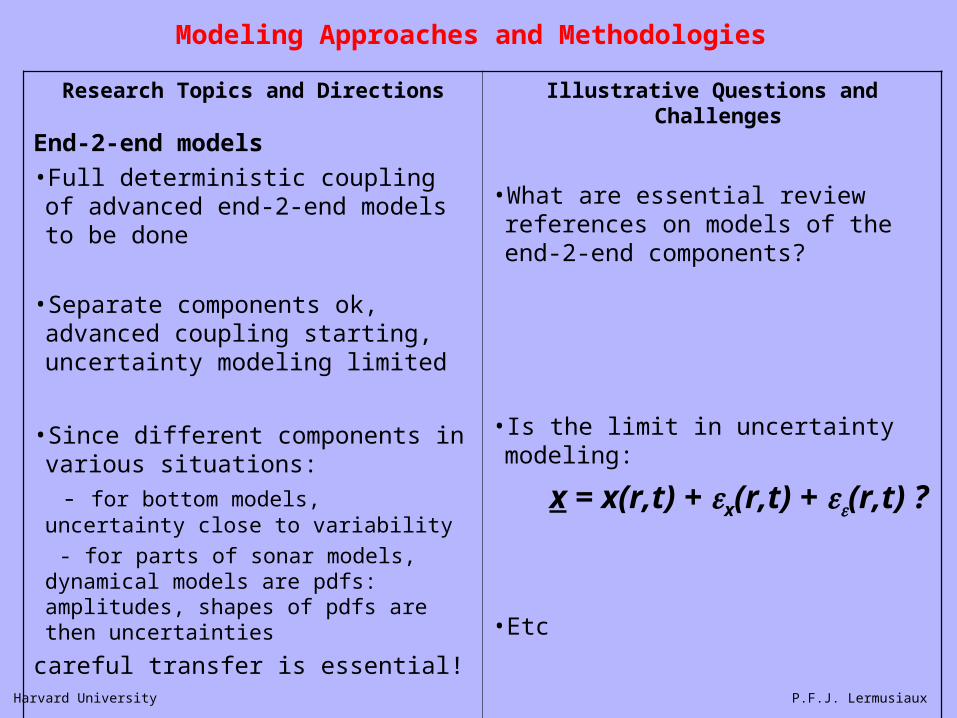
Research Topics and Directions
End-2-end models
• Full deterministic coupling of advanced end-2-end models to be done
• Separate components ok, advanced coupling starting, uncertainty modeling limited
• Since different components in various situations:
- for bottom models, uncertainty close to variability
- for parts of sonar models, dynamical models are pdfs: amplitudes, shapes of pdfs are then uncertainties
careful transfer is essential!
Illustrative Questions and Challenges
• What are essential review references on models of the end-2-end components?
• Is the limit in uncertainty modeling:
x = x(r,t) + x(r,t) + (r,t) ?
• Etc
Modeling Approaches and Methodologies
Harvard University P.F.J. Lermusiaux
Research Topics and Directions
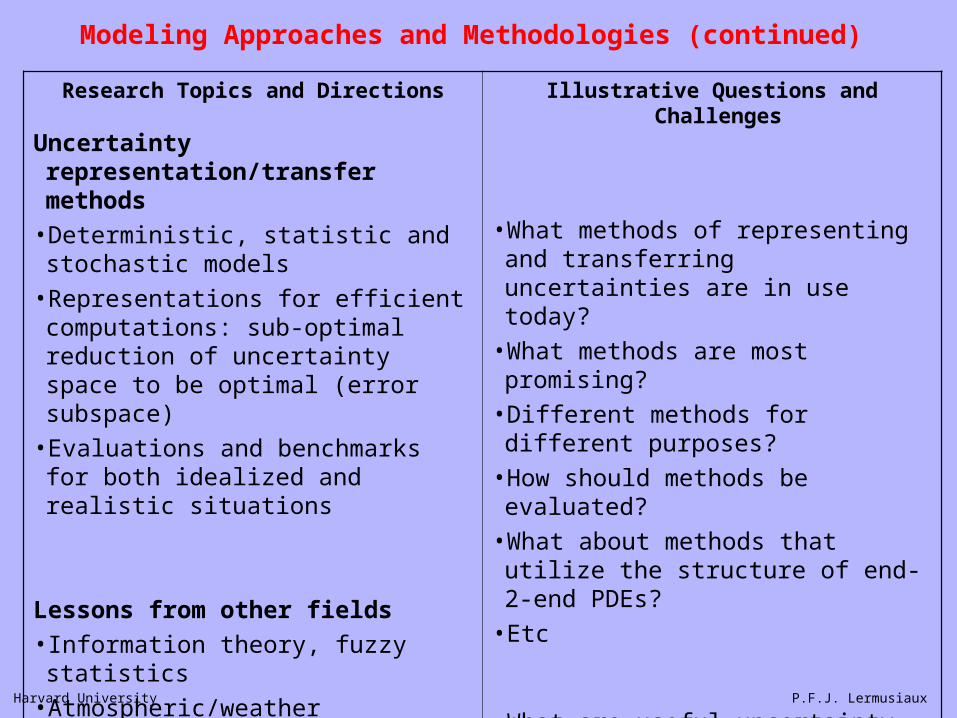
Uncertainty representation/transfer methods
• Deterministic, statistic and stochastic models
• Representations for efficient computations: sub-optimal reduction of uncertainty space to be optimal (error subspace)
• Evaluations and benchmarks for both idealized and realistic situations
Lessons from other fields
• Information theory, fuzzy statistics
• Atmospheric/weather forecasting
Illustrative Questions and Challenges
• What methods of representing and transferring uncertainties are in use today?
• What methods are most promising?
• Different methods for different purposes?
• How should methods be evaluated?
• What about methods that utilize the structure of end-2-end PDEs?
• Etc
• What are useful uncertainty representations?
• What can be learned: methods, systems?
• Etc
Modeling Approaches and Methodologies (continued)
Harvard University P.F.J. Lermusiaux
Research Topics and Directions
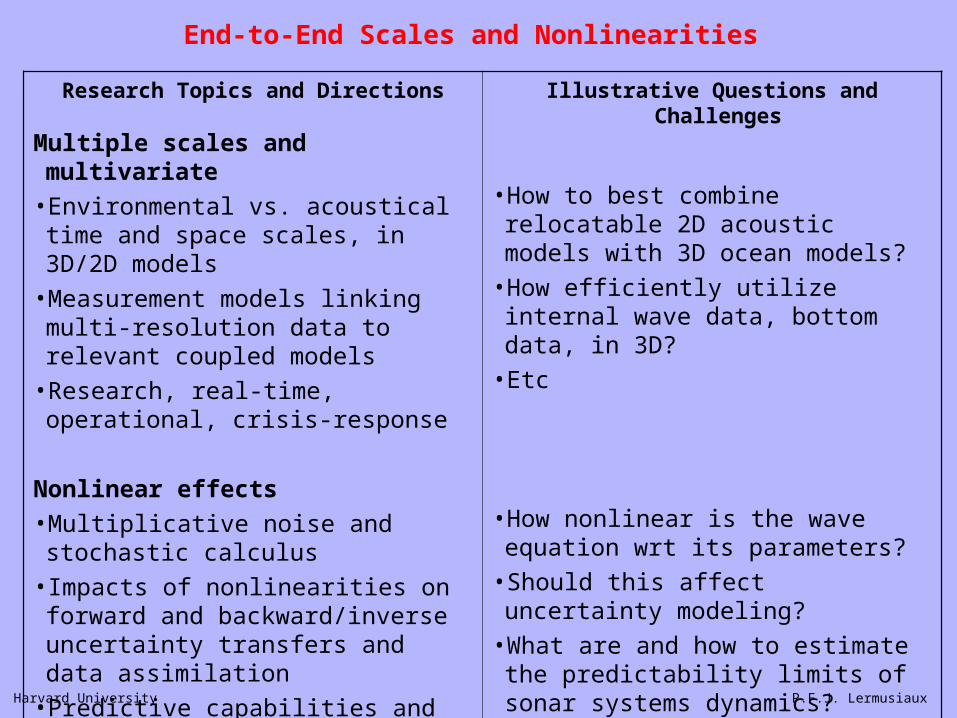
Multiple scales and multivariate
• Environmental vs. acoustical time and space scales, in 3D/2D models
• Measurement models linking multi-resolution data to relevant coupled models
• Research, real-time, operational, crisis-response
Nonlinear effects
• Multiplicative noise and stochastic calculus
• Impacts of nonlinearities on forward and backward/inverse uncertainty transfers and data assimilation
• Predictive capabilities and ultimate predictability limits for e-2-e systems
Illustrative Questions and Challenges
• How to best combine relocatable 2D acoustic models with 3D ocean models?
• How efficiently utilize internal wave data, bottom data, in 3D?
• Etc
• How nonlinear is the wave equation wrt its parameters?
• Should this affect uncertainty modeling?
• What are and how to estimate the predictability limits of sonar systems dynamics?
• Etc
End-to-End Scales and Nonlinearities

Harvard University P.F.J. Lermusiaux
Research Topics and Directions
Error models
• Stochastic, deterministic, adaptive (for both dynamics/data)
• Structural errors and parameter errors
• Error models for unresolved processes, forcing and boundary condition errors, environmental noise
• Measurement models and data uncertainties for end-2-end (physical, geological, acoustical and sonar) data bases
Efficient error reductions
• Data assimilation methods: Control, estimation, inverse and optimization theories, and stochastic/hybrid methods
• Model state, model parameters and model structures estimations
• End-2-end adaptive sampling and model improvements
Illustrative Questions and Challenges
• How to quantitatively prioritize uncertainties?
• How to differentiate between structural and parameter errors in such complex systems?
• How to estimate accurate stochastic forcings?
• How to account for and model interdisciplinary measurement errors?
• Etc
• Why should uncertainty representations and uncertainty reduction criterion be compatible?
Error Estimation, Error Models and Error Reductions
Harvard University P.F.J. Lermusiaux
Research Topics and Directions
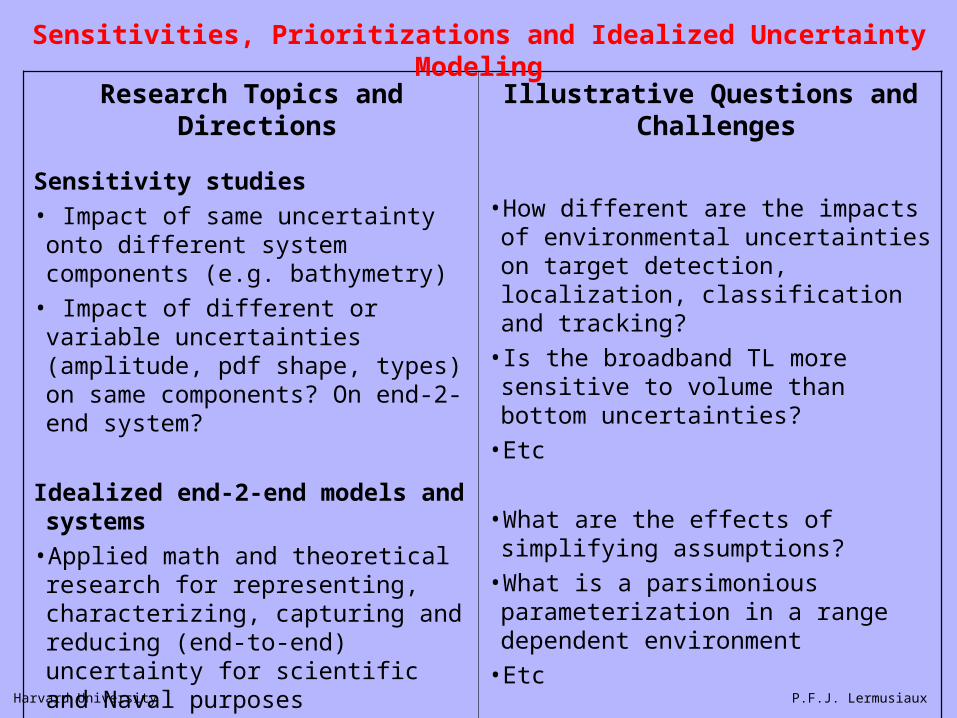
Sensitivity studies
• Impact of same uncertainty onto different system components (e.g. bathymetry)
• Impact of different or variable uncertainties (amplitude, pdf shape, types) on same components? On end-2-end system?
Idealized end-2-end models and systems
• Applied math and theoretical research for representing, characterizing, capturing and reducing (end-to-end) uncertainty for scientific and Naval purposes
• Truncation issues and divergence
Illustrative Questions and Challenges
• How different are the impacts of environmental uncertainties on target detection, localization, classification and tracking?
• Is the broadband TL more sensitive to volume than bottom uncertainties?
• Etc
• What are the effects of simplifying assumptions?
• What is a parsimonious parameterization in a range dependent environment
• Etc
Sensitivities, Prioritizations and Idealized Uncertainty Modeling
Harvard University P.F.J. Lermusiaux
Research Topics and Directions
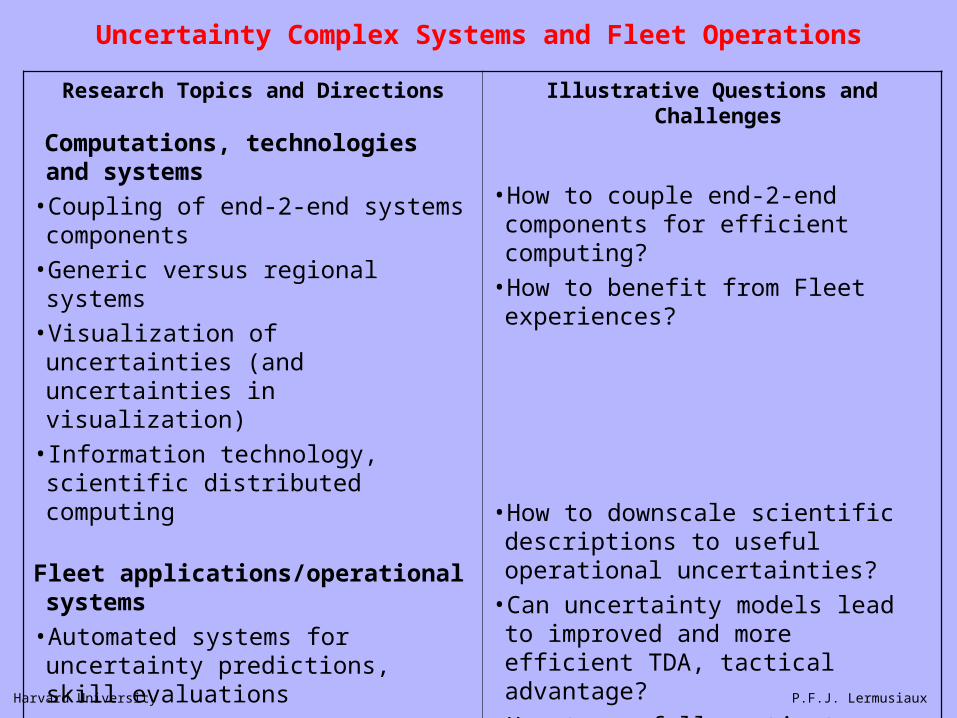
Computations, technologies and systems
• Coupling of end-2-end systems components
• Generic versus regional systems
• Visualization of uncertainties (and uncertainties in visualization)
• Information technology, scientific distributed computing
Fleet applications/operational systems
• Automated systems for uncertainty predictions, skill evaluations
• Efficient research-to-operation and operation-to-research transitions/feedbacks
• Research, real-time, operational, crisis-response
• Typical scenarios and rules of thumb
Illustrative Questions and Challenges
• How to couple end-2-end components for efficient computing?
• How to benefit from Fleet experiences?
• How to downscale scientific descriptions to useful operational uncertainties?
• Can uncertainty models lead to improved and more efficient TDA, tactical advantage?
• How to usefully estimate accuracies/errors of an operational system?
• Should operator overload uncertainties be modeled?
Uncertainty Complex Systems and Fleet Operations